KS0412 keyestudio L298P Shield
1. Introduction
You can use UNO R3 microcontroller and add external components to complete a variety of amazing experiments, such as smart robot DIY.
When DIY your robot, it is necessary to use the motor driver board to drive the DC motors, however, sometimes need to connect the motor drive board to UNO using lots of jumper wires, pretty inconvenient.
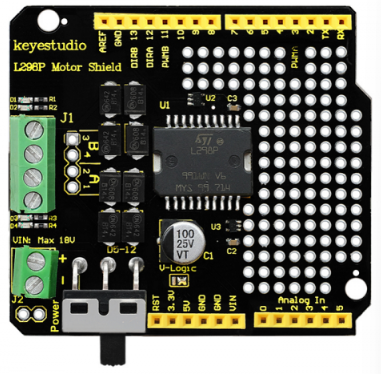
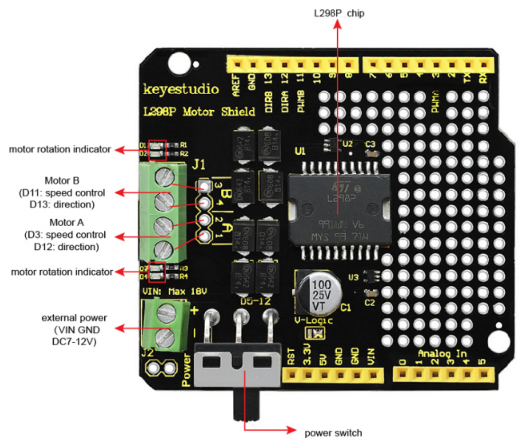
Now, we have launched this keyestudio motor shield with L298P as core. Note that the motor’s speed and direction interfaces have been connected. D3 is for controlling the speed of motor A, and D12 is for controlling the direction of motor A. D11 is for controlling the speed of motor B, and D13 is for controlling the direction.
Just simply stack the shield onto UNO board to power the shield and UNO board. The 3 kinds of power supply are as follows:
You can power the board via the black DC jack on the UNO R3 board.
Or power the board through the VIN GND female header of 2.54mm pitch on the shield.
Supply the power through the green terminal blocks on the shield.
The L298P shield also comes with through-hole welding space, so you are able to weld the electronic elements to design a variety of prototyping circuits.
Pay close attention to:
The shield comes with a slide switch. When power via the DC jack on the UNO R3 and female headers on the L298P shield, the slide switch is not available.But when power via the green terminal blocks on the L298P shield, the slide switch can be used as power control switch.
2. Specifications
Logic part input voltage |
DC5V |
|---|---|
Driving part input voltage |
Max DC 18V (DC 7-12V recommended) |
Logic part working current |
≤36mA |
Driving part working current |
≤ 2A |
Maximum dissipation power |
25W (T=75℃) |
Control signal input level |
High level: 2.3V ≤ Vin ≤ 5V ; Low level: 0V ≤ Vin ≤ 1.5V |
Working temperature |
-25℃ to+130℃ |
Driver form |
Dual power H bridge driving |
3. Controller Compatible
keyestudio UNO R3 BOARD
4. Technical Details
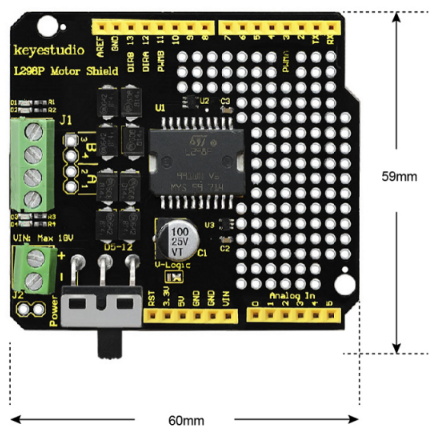
Dimensions: 60mm x 59mm x 23mm
Weight: 21g
5. PINOUT Instruction
6. How to Test it ?
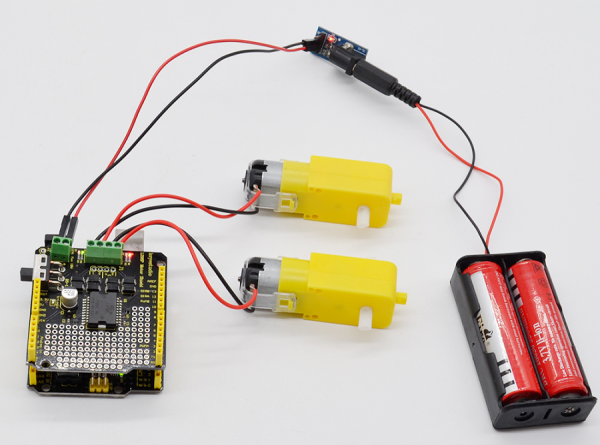
Connect it Up
Simply stack the shield onto UNO R3 board, then connect two motors to terminal block.
Upload the Code
Code download: Resources
int E1 = 3;
int M1 = 12;
int E2 =11;
int M2 = 13;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, 200); // PWM regulate speed
analogWrite(E2, 200); // PWM regulate speed
delay(8000);
digitalWrite(M1,LOW);
digitalWrite(M2, LOW);
analogWrite(E1, 200); //PWM regulate speed
analogWrite(E2, 200); //PWM regulate speed
delay(8000);
}
Test Result
Upload well the code, turn the switch ON, you should see the two motors firstly turn forward for 8 seconds, then reverse for 8 seconds, alternately and circularly. Turn the switch OFF, the voltage is disconnected, the motor will keep still.