Arduino Tutorial
1. Software Installation
-
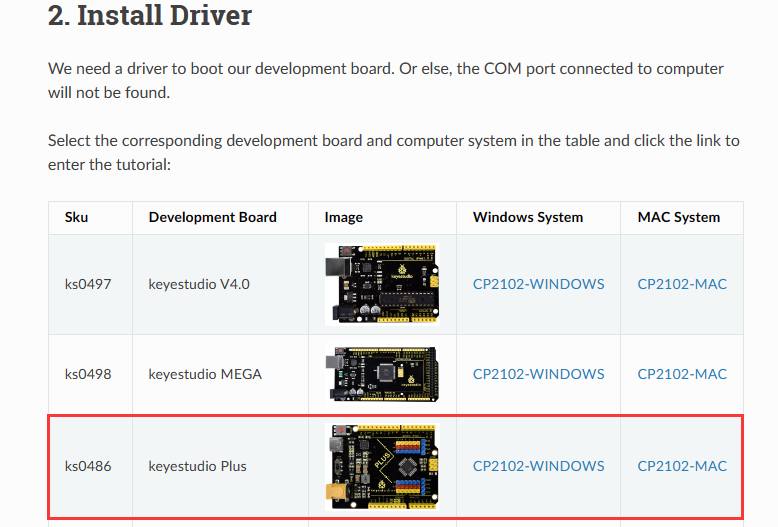
Please select the corresponding system tutorial according to your configuration and install the CP2102 driver.
Please download the libraries first :Libraries
-
Please select the corresponding system tutorial according to your configuration.
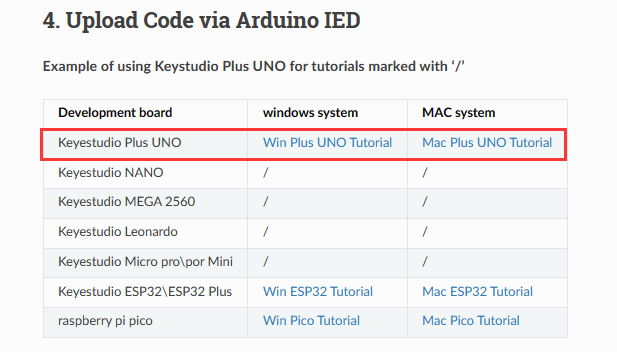
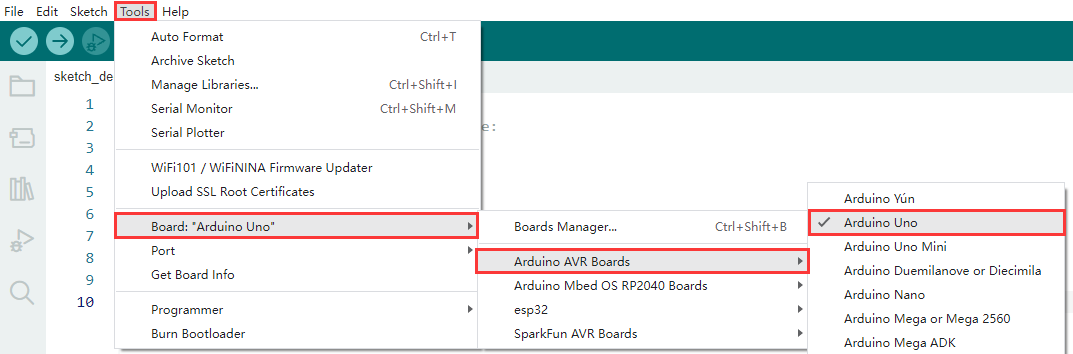
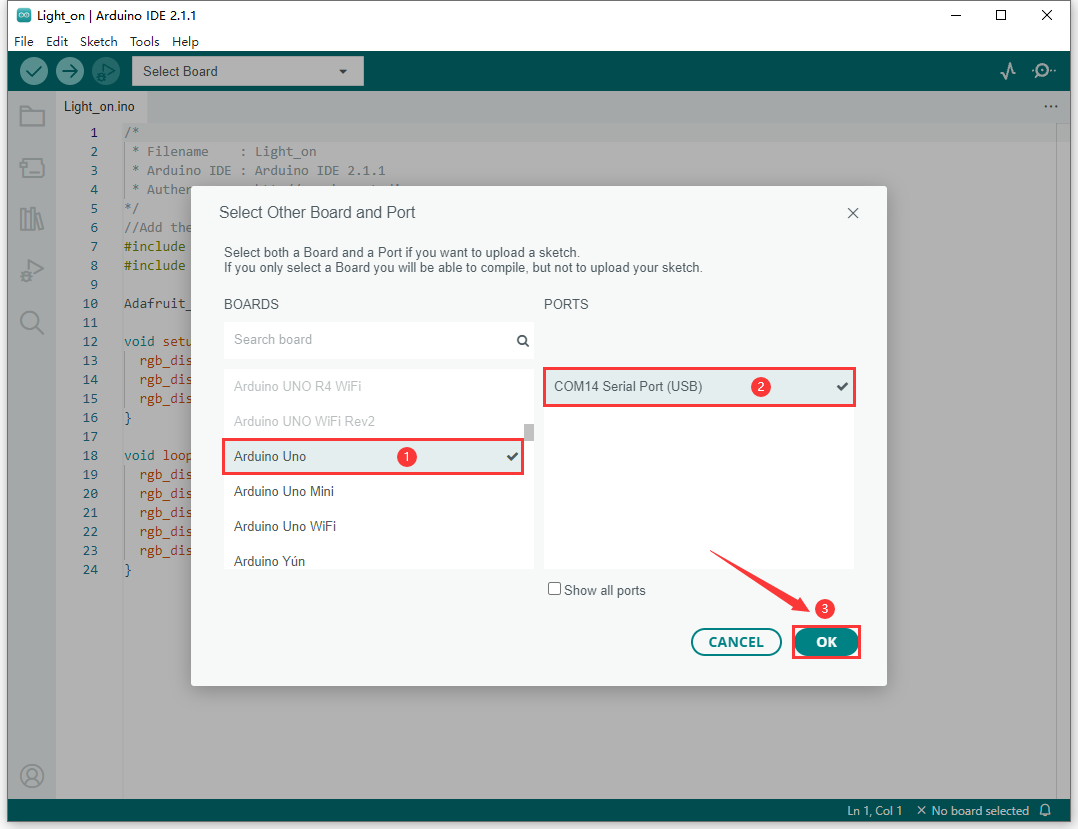
Board please select : Arduino Uno
2. Download code
Please download the code :ArduinoCode
3. Single Module Learning
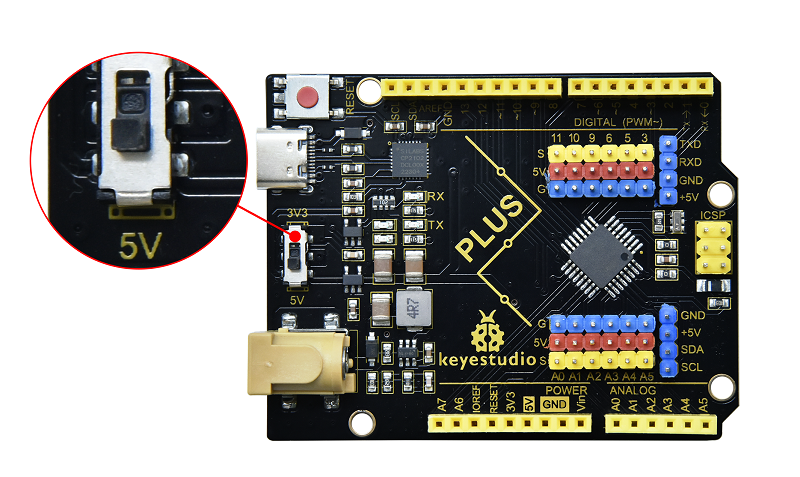
Before learning, flip the voltage switch on the main board to 5V.
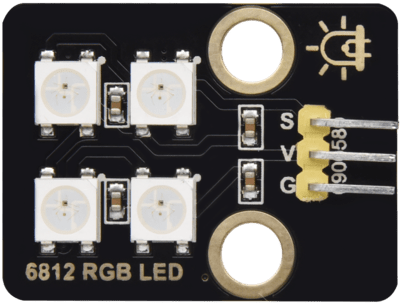
3.1 SK6812 RGB Module
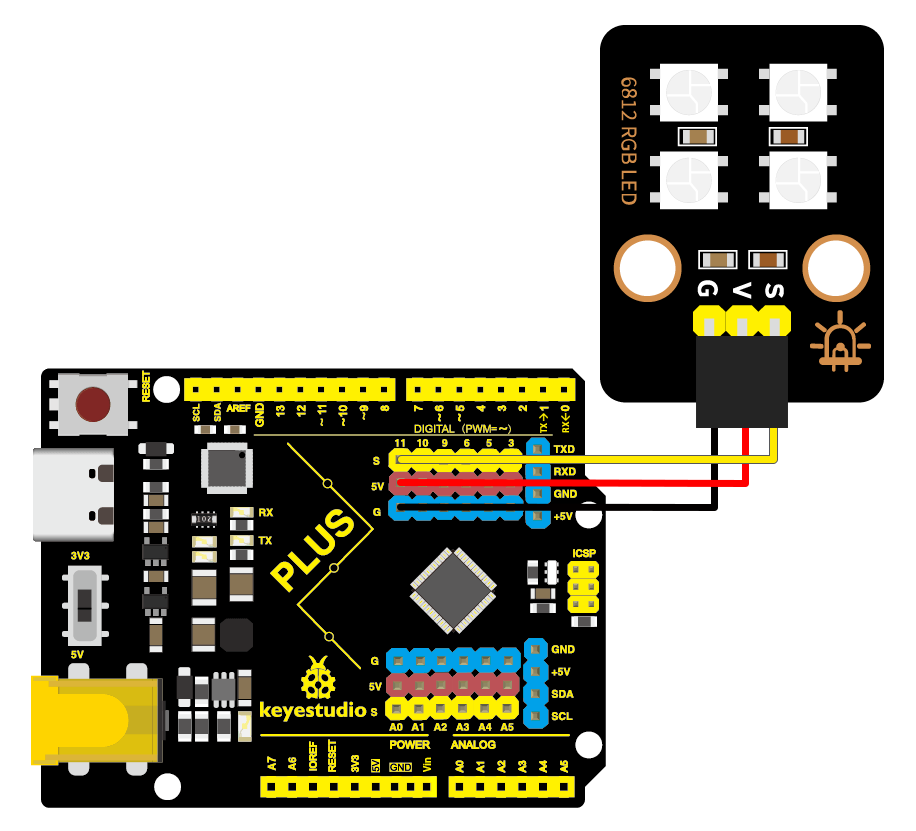
The built-in IC of the SK6812 can display 256 * 256 * 256 colors in a way that achieves multiple effects. Its control can be realized via only one signal wire. It is an intelligent externally controlled LED light source with the control circuit and the light-emitting circuit. Each LED element is the same as a 5050 LED lamp bead, and each component is a pixel. There are four lamp beads on the module, which indicates four pixels.
Three primary colors principle
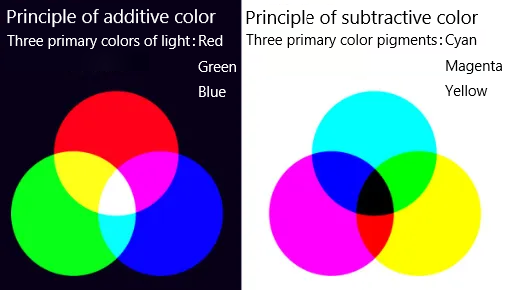
The three primary colors of pigments are red, yellow and blue, and the three primary colors of colored light are red, green and blue, which is called RGB.
The human eyes are most sensitive to the RGB colors, and most colors can be produced by combining the RGB colors in different proportions. Similarly, most monochromatic light can also be decomposed into three colors of RGB. This is the most basic principle of colorimetry(three primary colors).
The three primary colors of RGB are added in different proportions to form mixed colors, which is called additive color mixing. And there is also the subtractive color mixing method. Colors can be added and subtracted as needed. The three primary colors of pigments cannot be adjusted to white, while the three primary colors of colored light can realize it via optical elements, which are obtained by mixing three equal parts of red, medium green and dark blue.
Parameters
Operating voltage : DC 5V
Maximum power : 1W
Light source : SMD 5050 RGB
IC model : 4/WS2811
Gray level : 256
Lighting angle : 180°
Light color: can be adjusted to white, red, yellow, blue and green via the controller
Operating temperature : -10°C ~ +50°C
Dimensions : 32 x 23.8 x 7.4 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram

From the schematic diagram, we can see that these four pixel lighting beads are all connected in series. In fact, no matter how many they are, we can use a pin to control a light and let it display any color. The pixel point contains a data latch signal shaping amplifier drive circuit, a high-precision internal oscillator and a 12V high-voltage programmable constant current control part, which effectively ensures the color of the pixel point light is highly consistent.
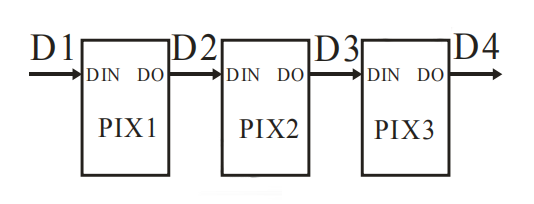
The data protocol adopts the communication method of unipolar nulling code, after the pixel point is reset, the DIN terminal accepts the data transmitted from the controller. The first 24bit data sent over is extracted by the first pixel point and sent to the data latch inside the pixel point, the rest of the data is shaped and amplified by the internal shaping processing circuit and then begins to be forwarded and outputted to the next cascade of pixel points via the DO port, and the signal is reduced by 24bit after the transmission of one pixel point.
The pixel point adopts the automatic shaping and forwarding technology, so that the number of cascade of the pixel point is not subject to the limitation of signal transmission, but only subject to the limitation of signal transmission speed.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
SK6812 RGB Module x1 |
3Pin 20cm Wire x1 |
USB Cable x1 |


Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.1Light_on.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Light_on
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
//Add the RGB6812 library file
#include <Adafruit_NeoPixel.h>
#define PIN 11 // Pins on the Arduino that connect to the NeoPixels.
#define NUMPIXELS 4 // Popular NeoPixel ring size.
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); // Defining rgb_display functions.
void setup() {
rgb_display.begin(); //Start 6812RGB
rgb_display.setBrightness(5); //Set the brightness to 5. The value ranges from 0 to 255
}
void loop() {
rgb_display.setPixelColor(0, 255, 0, 0); //The first lamp bead is bright red
rgb_display.setPixelColor(1, 0, 255, 0); //The second bead is bright green
rgb_display.setPixelColor(2, 0, 0, 255); //The third bead is bright blue
rgb_display.setPixelColor(3, 255, 255, 255); //The fourth lamp bead is bright white
rgb_display.show(); //Display the color of the lamp bead
}
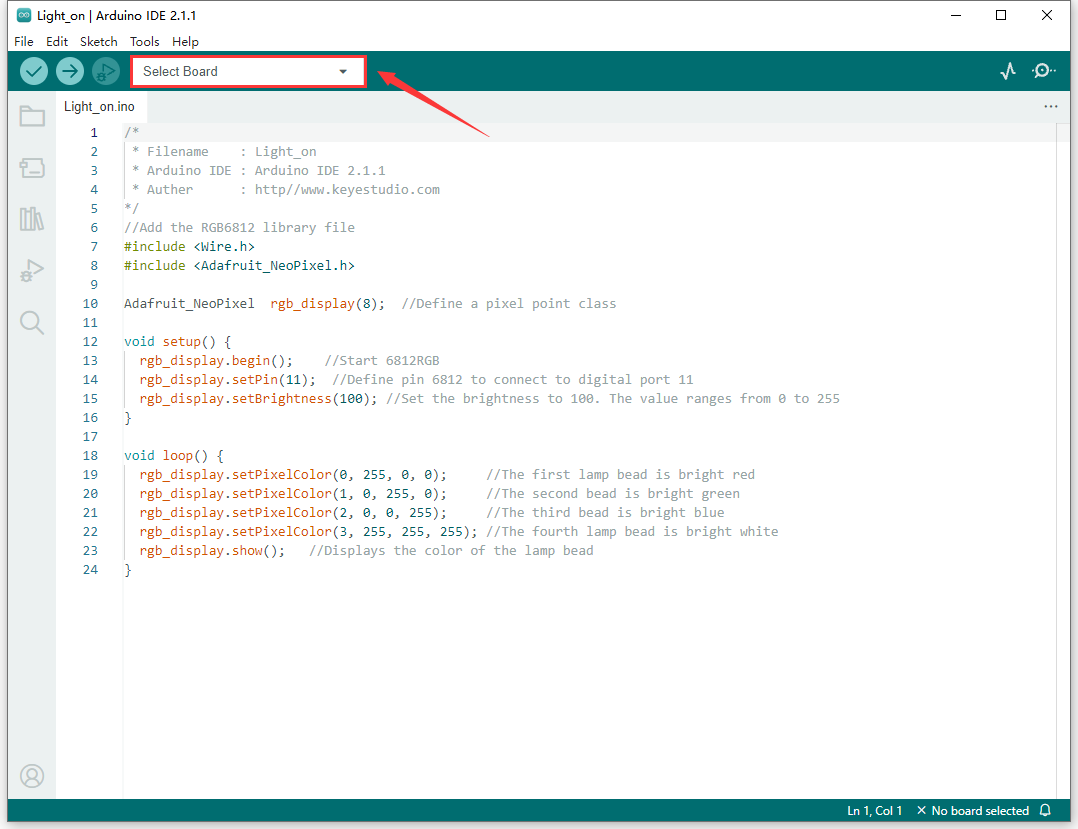
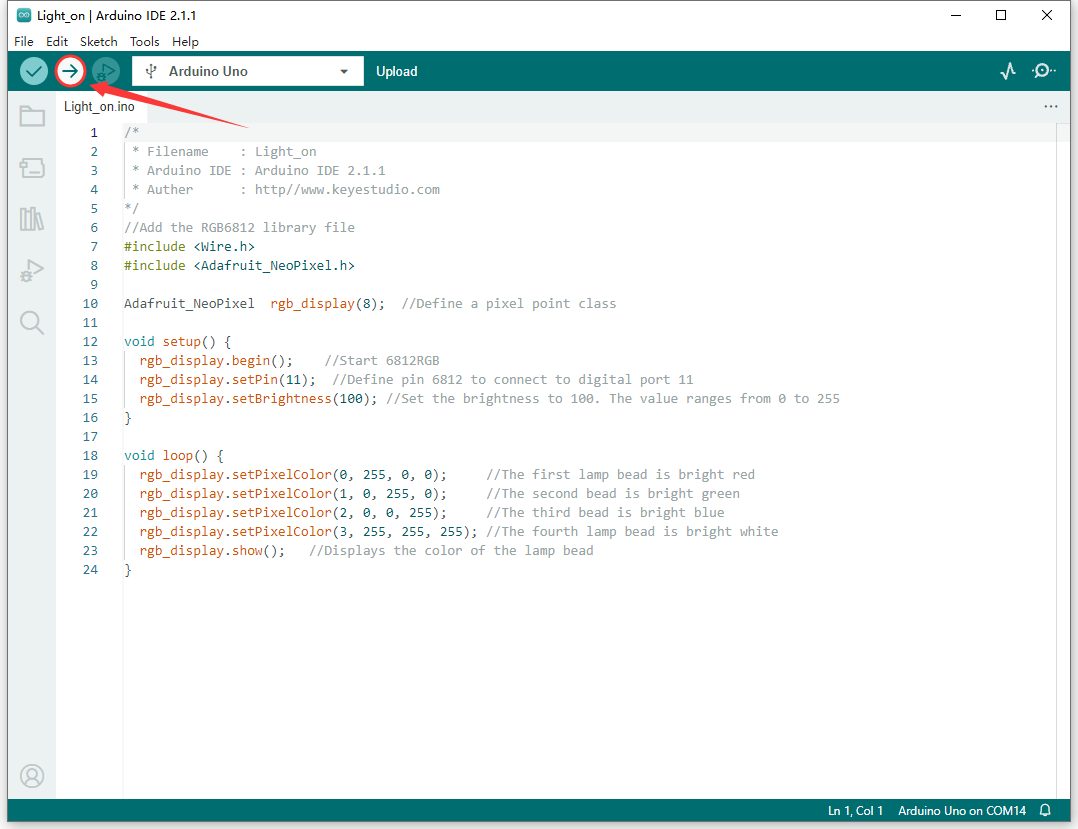
The corresponding port can only be seen after the board is connected to the computer via a USB cable. To avoid errors when uploading code to the board, you must select the control board and port that are properly connected to the computer.
If the code fails to be uploaded, then it will display “ Adafruit_NeoPixel.h:No such file or directory “.

Add the library:
Find the library path and select  .
.
Code Explanation
Code |
Explanation |
|---|---|
#include <Adafruit_NeoPixel.h> |
It is used to control and manage 6812 RGB LED |
#define PIN 11 |
Pin on the Arduino that connected to the NeoPixels |
#define NUMPIXELS 4 |
NeoPixels Pixel size (number of LEDs) |
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); |
Define the rgb_display function |
rgb_display.begin(); |
Initialize the rgb_display function |
rgb_display.setBrightness(5); |
Set the brightness to 5 and the range is 0 -255 |
rgb_display.setPixelColor(0, 255, 0, 0); |
Set the LED and color, the first LED is red |
rgb_display.setPixelColor(1, 0, 255, 0); |
Set the LED and color, the second LED is green |
rgb_display.setPixelColor(2, 0, 0, 255); |
Set the LED and color, the third LED is blue |
rgb_display.setPixelColor(3, 255, 255, 255); |
Set the LED and color, the fourth LED is white |
rgb_display.show(); |
Output function, after each setting we need to call it for output, otherwise there is no result. |
Test Result
After uploading code successfully, we will see the four RGB LEDs show red, green, blue and white color. Since the RGB LEDs are very bright, I have set the brightness to 5 in the code. You can change its value as required, the range is 0 ~ 255.
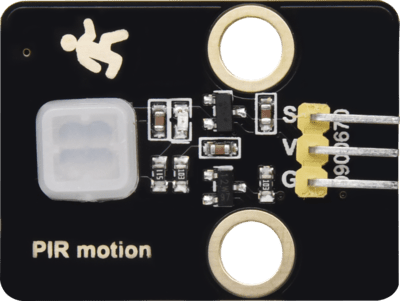
3.2 PIR Motion Sensor
The PIR motion sensor mainly uses a RE200B-P sensor element. It is a human body pyroelectric motion sensor based on pyroelectric effect, which can detect infrared rays emitted by humans or animals, and the Fresnel lens enables to make the sensor’s detection range farther and wider.
When using, we will determine if there is someone moving nearby by reading the high and low levels of the S terminal on the module.
Parameters
Operating voltage : DC 3.3 ~ 5V
Operating current : 50 mA
Maximum power : 0.3 W
Quiescent current : <50 uA
Operating temperature : -10°C ~ +50°C
Control signal : digital signal
Trigger mode: L for non-repeatable trigger / H for repeatable trigger
Maximum detection distance : 7m
Sensing angle : <100°
Dimensions : 32 x 23.8 x 7.4 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
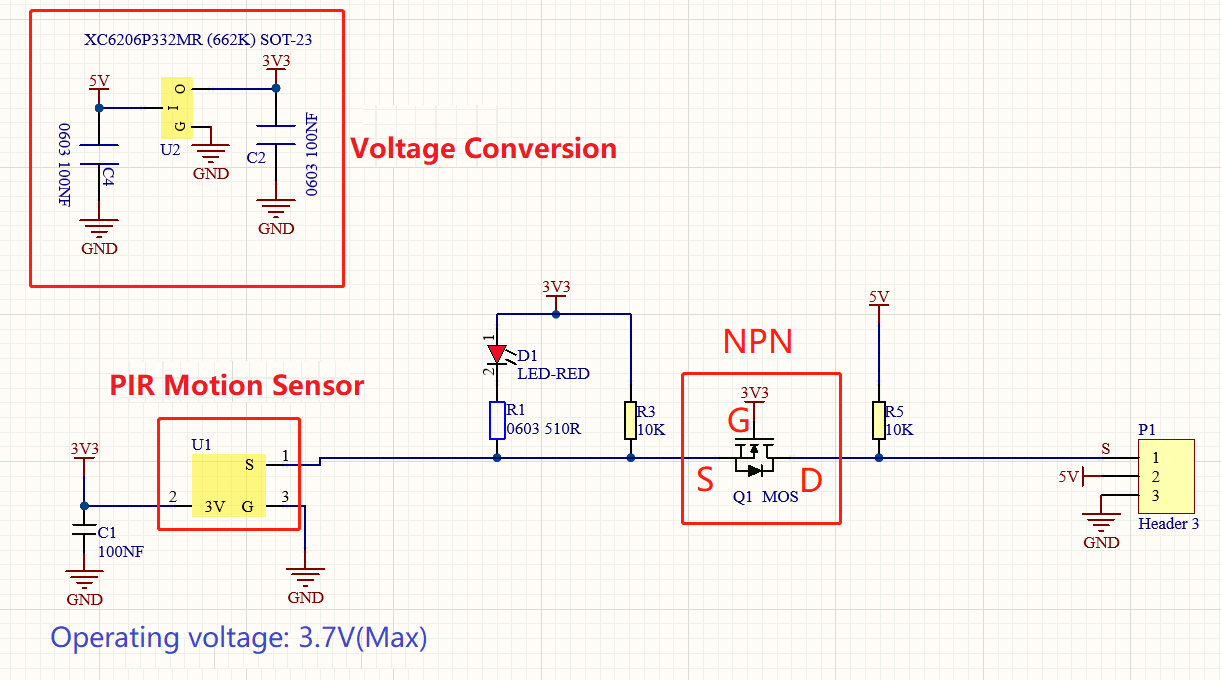
The voltage conversion part converts a 5V input voltage to a 3.3V input voltage. The working voltage of the PIR motion sensor we use is 3.3V, therefore we can’t use 5V directly. The voltage conversion circuit is needed.
When no infrared signal is received, and pin 1 of the sensor outputs low level. At this time, the LED on the module will light up and the MOS tube Q1(Q1 is an NPN MOS tube, model is 2N7002) will be connected and the signal terminal S will detect Low level.
When infrared signal is received, and pin 1 of the sensor outputs a high level. Then LED on the module will go off, the MOS tube Q1 is disconnected and the signal terminal S will detect high level that is pulled up by a 10K pull-up resistor R5.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
PIR Motion Sensor x1 |
3Pin 25cm Wire x1 |
USB Cable x1 |
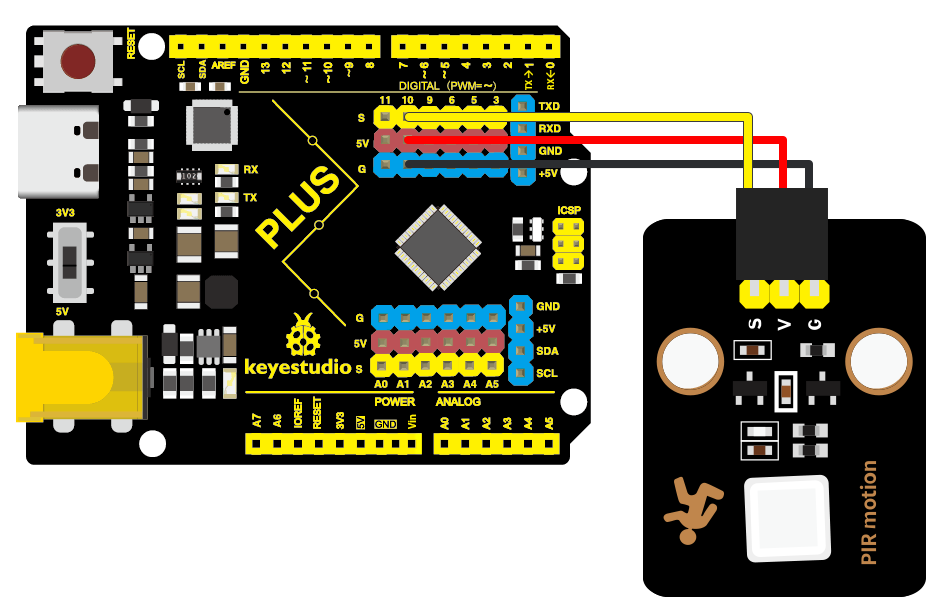
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.2PIR_motion.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : PIR_motion
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
int value = 0;
int pirPin = 10; //The pin of the PIR motion
void setup() {
Serial.begin(9600); //Set baud rate
pinMode(pirPin, INPUT); //Set input mode
}
void loop() {
value = digitalRead(pirPin); //Read the value of the sensor
Serial.print(value); //Print value
if (value == 1) { //There's someone nearby. Output high
Serial.print(" ");
Serial.println("Some body is in this area!");
delay(100);
}
else { //If no person is detected, the output is low
Serial.print(" ");
Serial.println("No one!");
delay(100);
}
}
The corresponding port can only be seen after the board is connected to the computer via a USB cable. To avoid errors when uploading code to the board, you must select the control board and port that are properly connected to the computer.
Code Explanation
Relational operator |
Description |
|---|---|
== |
Check whether the values of the two operands are equal, and if so, the condition is true |
Assigning operator |
|
|---|---|
= |
Assign the value of the right operand to the left operand |
Code |
Explanation |
|---|---|
int value = 0; |
Define an integer variable value with an initial default value of 0. |
int pirPin = 10; |
Pin of the PIR motion sensor |
Serial.begin(9600); |
Serial is a library, begin() is its library function, initialize serial communication and set the baud rate to 9600 |
pinMode(button, INPUT); |
Set pin to INPUT mode |
digitalRead(pirPin); |
Read digital level: HIGH or LOW) |
value = digitalRead(pirPin); |
Assigns the level value read by the pirPin pin to value |
Serial.print(value); |
Serial is a library, and the library function print( )stands for printing data to a serial monitor. |
if( ){ } else{ } |
if the expression in ( ) is true, the code in the if { } block is executed |
Serial.print(” “); |
Serial is a library, and the library function print() stands for printing data to serial monitor. |
Serial.println(“No one!”); |
println() means to print the contents of the serial monitor in double quotes and wrap lines. |
delay(100); |
delay 100ms |
Code Block Explanation
if judgment statement
There are three flow control statements:
Sequential control
The program is executed line by line from top to bottom, without any judgment or jump in between.
Branch control
Single branch
Dual branch
Multiple branch
Cycle control
There are for cycle control, while cycle control and do…while cycle control.
Single branch
if(condition expression){
Execute block;
}
When the condition expression is true (not 0), the code in { } is executed, otherwise the code in { } is not executed.
Dual branch
if(condition expression){
Execute block 1;
}
else{
Execute block 2;
}
When the condition expression is true, execute block 1,otherwise execute block 2.
Multiple branch
if(condition expression 1){
Execute block 1;
}
else if (condition expression 2){
Execute block 2;
}
......
else if (condition expression n){
Execute block n;
}
else{
Execute block n+1;
}
When the conditional expression 1 is true, code block 1 is executed.
If expression 1 is not valid, then determine whether expression 2 is valid, if expression 2 is valid, execute code block 2, otherwise continue to judge.
If none of the expressions hold, the code block n+1 is executed.
Example
if (value == 1) { //There's someone nearby. Output high
Serial.print(" ");
Serial.println("Some body is in this area!");
delay(100);
}
else { //If no person is detected, the output is low
Serial.print(" ");
Serial.println("No one!");
delay(100);
}
When the value is 1 (a person is detected), print out “Some body is in this area!” , otherwise print out “No one!” .
Test Result
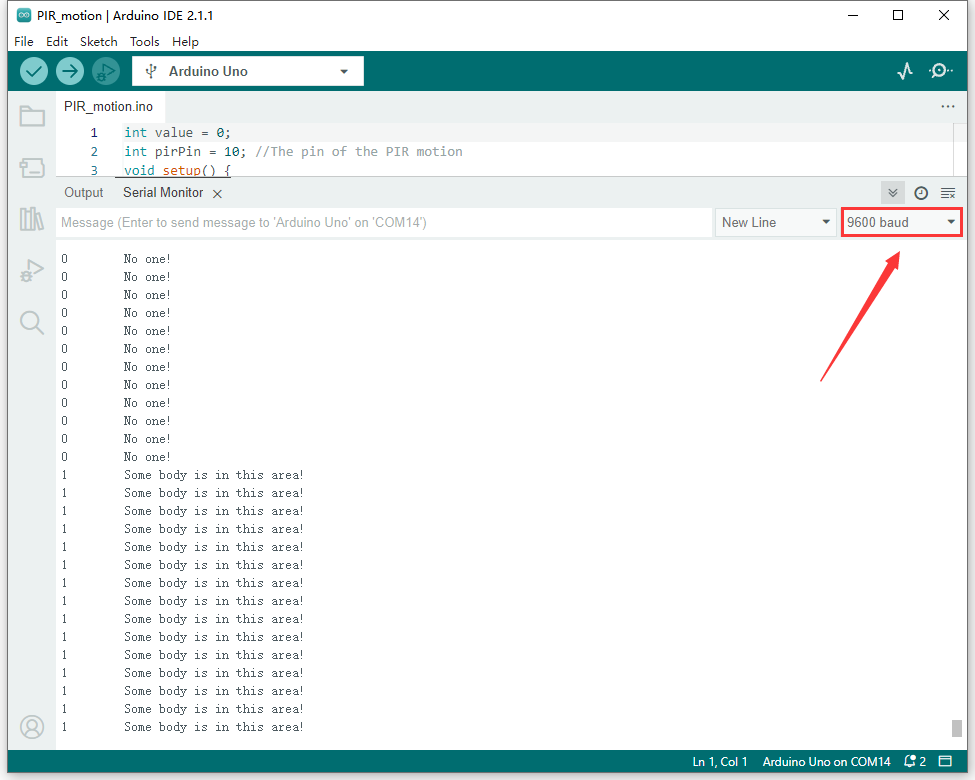
After wiring up and uploading code successfully,open the serial monitor and set the baud rate to 9600.
When the sensor detects someone nearby, value is 1, the LED will light off and the monitor will show “1 Somebody is in this area!”. In contrast, the value is 0, the LED will light up and “0 No one!” will be shown.
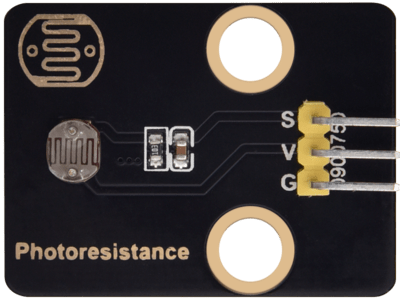
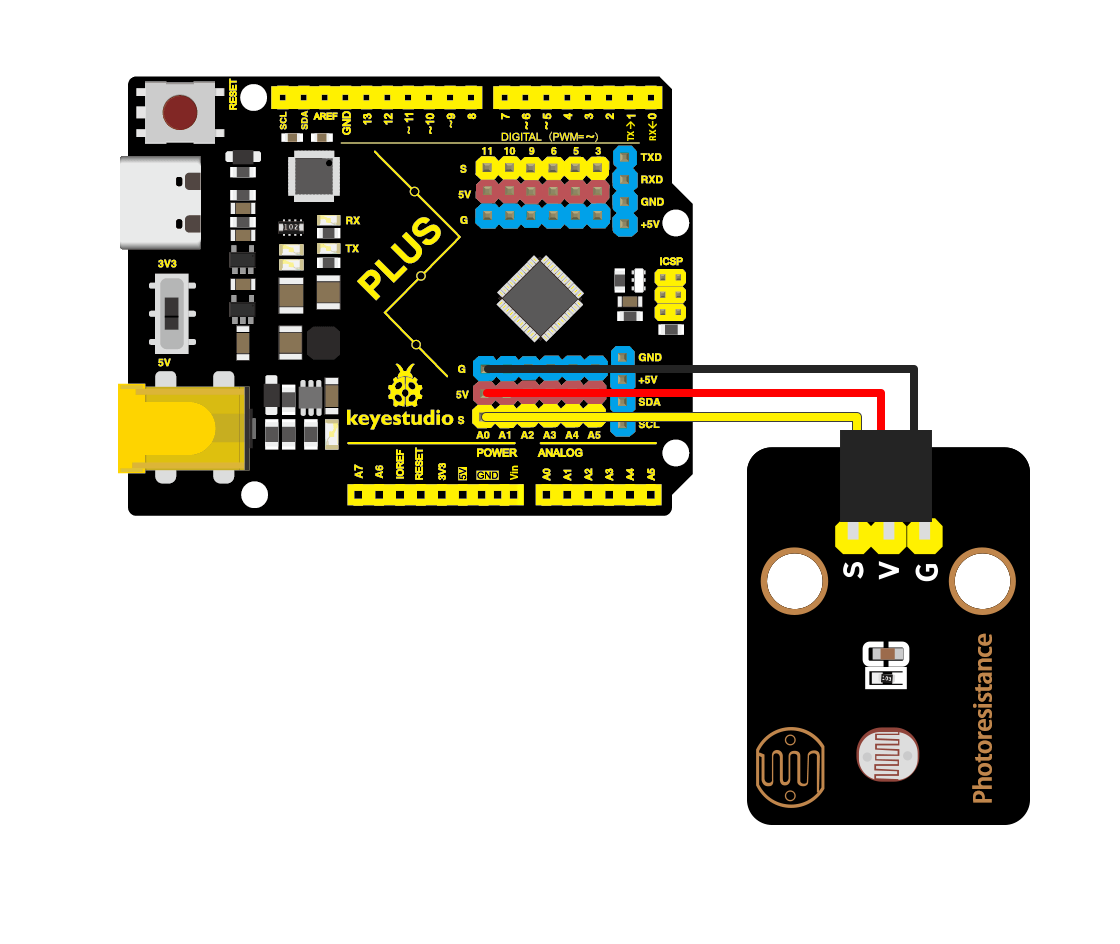
3.3 Photoresistor
It mainly consists of a photoresistor element and its resistance changes with the light intensity. Also, it converts the resistance change into voltage change via the characteristic. It is able to simulate people’s judgment of the intensity of the ambient light and facilitate the application of friendly interaction with people.
Parameters
Operating voltage : DC 3.3 ~ 5V
Current : 20 mA
Maximum power : 0.1 W
Operating temperature : -10°C ~ +50°C
Output signal : Analog signal
Dimensions : 32 x 23.8 x 7.4 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
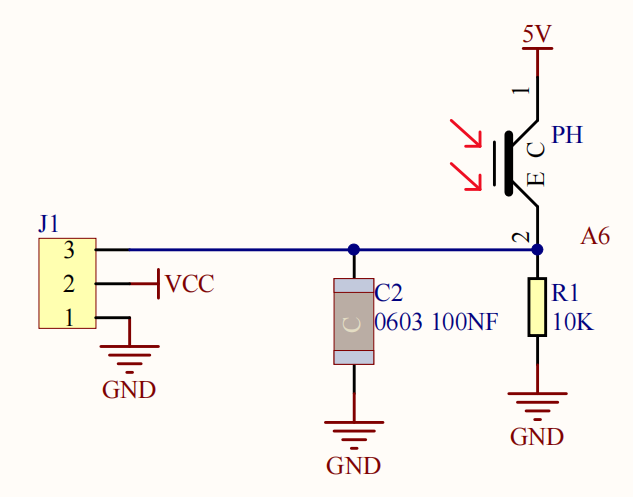
When there is no light, the signal end of the photoresistor detects a voltage close to 0.When the light intensity increases, the resistance of photoresistor will diminish, thus the detected voltage at the signal end increases.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
Photoresistor x1 |
3Pin 25cm Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.3Photoresistance.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Photoresistance
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
int val = 0;
int photoPin = A0; //The pin of the Photoresistance
void setup() {
Serial.begin(9600); //Set baud rate
pinMode(photoPin, INPUT); //Set input mode
}
void loop() {
val = analogRead(photoPin); //Read the value of the sensor
Serial.println(val); //Print value
delay(100); //delay 100ms
}
The corresponding port can only be seen after the board is connected to the computer via a USB cable. To avoid errors when uploading code to the board, you must select the control board and port that are properly connected to the computer.
Code Explanation
Assigning operator |
Explanation |
|---|---|
= |
Assign the value of the right operand to the left operand |
Code |
Explanation |
|---|---|
int val = 0; |
Define an integer variable value with an initial default value of 0. |
int photoPin = A0; |
Pin of the photoresistor |
Serial.begin(9600) |
Serial is a library, begin() is its library function, initialize serial communication and set the baud rate to 9600 |
pinMode(photoPin, INPUT); |
Set pin to INPUT mode |
val = analogRead(photoPin); |
Read the analog value of the photoPin pin and assign it to the variable val |
Serial.println(val); |
Serial is a library, and println() is its library function that outputs the ASCII-encoded value of val in decimal form and follows a return and a newline character |
delay(100); |
delay 100ms |
Test Result
After uploading code successfully,open the serial monitor and set the baud rate to 9600. Then we can see the analog value corresponding to the light intensity, when the light intensity gets stronger, the analog value will be larger.
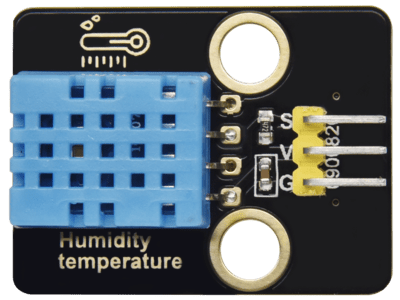
3.4 XHT11 Temperature and Humidity Sensor
XHT11 temperature and humidity sensor, a low-cost entry-level temperature and humidity sensor, is mainly composed of a resistive moisture-sensing element and a NTC temperature element. It uses a single-wire serial interface with 4-pin single-row pin package, and the signal transmission distance can reach more than 20m via an appropriate pull-up resistor.
It features fast response, strong anti-interference ability and cost-effective.
Parameters
Working voltage: DC 3.3 ~ 5V
Current: 50 mA
Maximum power: 0.25W
Operating temperature: -25°C ~ +60°C
Temperature range: 0 ~ 50°C ± 2 °C
Humidity range: 20% ~ 90%RH ± 5%RH
Output signal: digital bidirectional unibus
Dimensions: 32 x 23.8 x 9.7mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
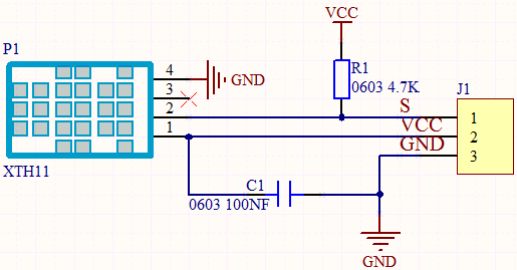
The communication and synchronization between the single-chip microcomputer and XHT11 adopts the single bus data format. The communication time is about 4ms. The data is divided into fractional part and integer part.
Operation process: A complete data transmission is 40bit, high bit first out.
Data format: 8bit humidity integer data + 8bit humidity decimal data + 8bit temperature integer data + 8bit temperature decimal data + 8bit checksum
8-bit checksum: 8-bit humidity integer data + 8-bit humidity decimal data + 8-bit temperature integer data + 8-bit temperature decimal data “Add the last 8 bits of the result.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
XHT11 Temperature |
3Pin 20cm Wire x1 |
USB Cable x1 |
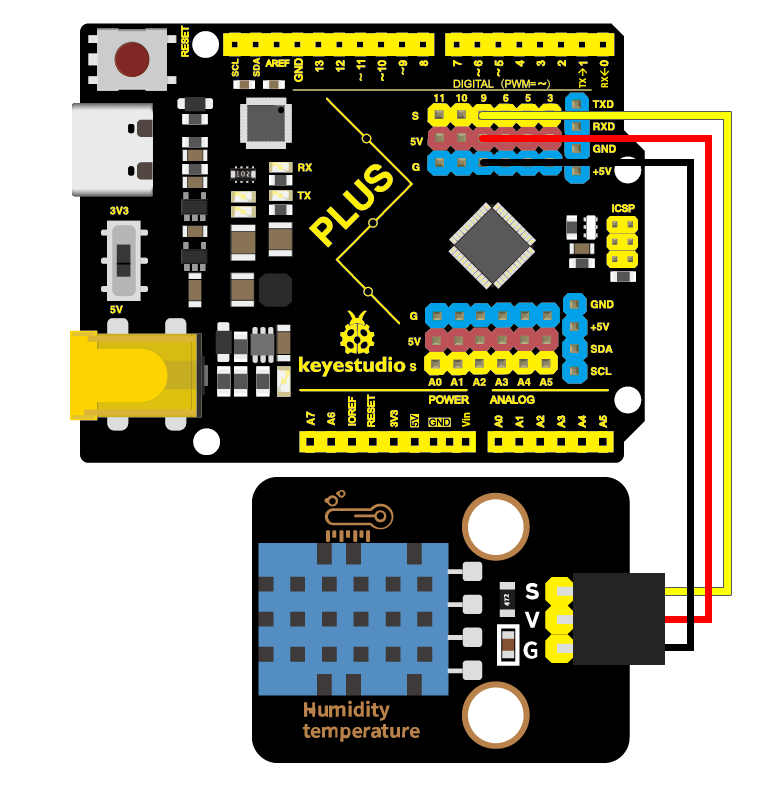
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.4XHT11.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : XHT11
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include "xht11.h"
xht11 xht(9);
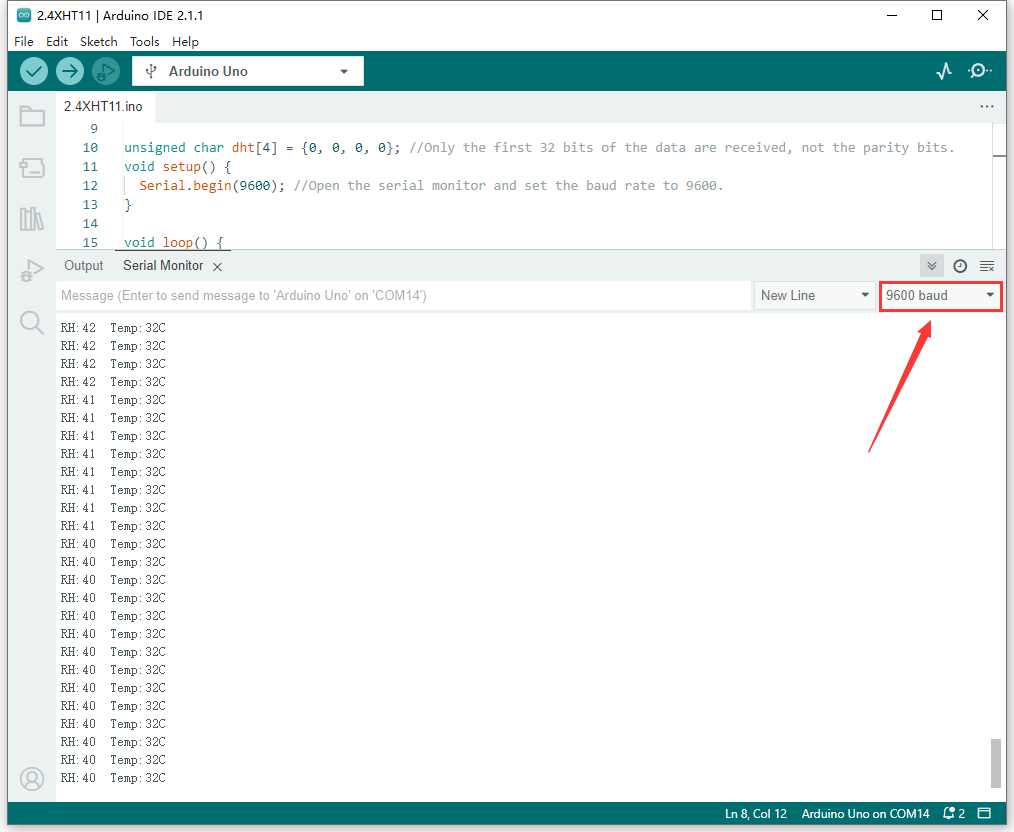
unsigned char dht[4] = {0, 0, 0, 0}; //Only the first 32 bits of the data are received, not the parity bits.
void setup() {
Serial.begin(9600); //Open the serial monitor and set the baud rate to 9600.
}
void loop() {
if (xht.receive(dht)) { //True returns true when checked correctly.
Serial.print("RH:");
Serial.print(dht[0]); //The integral part of humidity, DHT[1], is a fractional part series. Print (" % ");
Serial.print(" Temp:");
Serial.print(dht[2]); //The integral part of temperature, DHT[3], is the decimal part.
Serial.println("C");
} else { //Read error
Serial.println("sensor error");
}
delay(1000); //It takes 1000ms to wait for the device to read.
}
Code Explanation
Code |
Explanation |
|---|---|
unsigned char dht[4] = {0, 0, 0, 0} |
Store the read temperature and humidity data into the array dht[4] |
Test Result
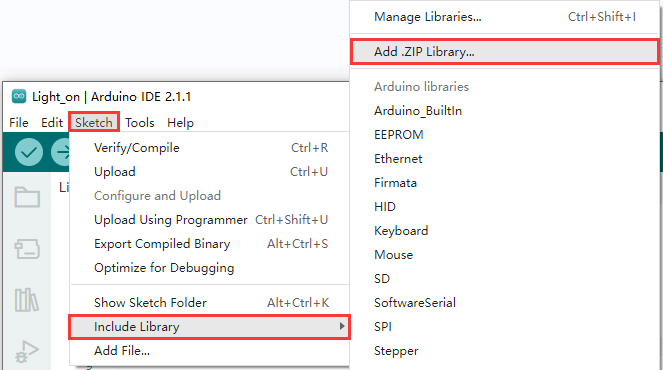
Wire up and upload the code, if the code fails to be uploaded and “xht11.h: No such file or directory” appears, then you need to add the library.
Tap “Sketch”, “Include Library” and “ADD .ZIP Lirbrary…”, then open the library folder according to the path of the library file, select “xht11.zip” library compression package, and then click “Open”.
After uploading it successfully, open the serial monitor and set baud rate to 9600, then the monitor will display the temperature and humidity data of the current environment.
3.5 LCD1602 Display
1602 Liquid Crystal Display is a dot matrix LCD module committed to displaying letters, numbers and symbols.
Character LCD is capable of displaying (16x02)32 characters at the same time. It is composed of a number of dot matrix character bits, each dot matrix character bit can display a character. There is a dot interval between every two dot matrix character bits, and an interval between each line, which plays the role of character spacing and line spacing, thus, it can not display graphics well.
It simplifies LCD1602 wiring and saves GPIO ports with IIC/I2C ports. It is compatible with Arduino library files for quick development. It can adjust the contrast via the potentiometer on the IIC expansion board.

Parameters
Operating voltage: 5V
Working current: < 130 mA
Operating temperature: -10°C ~ +50°C
Temperature range: 0 ~ 50°C ± 2 °C
IIC address: 0x27
Dimension:80 x 36 x 17.2 mm
Dimension of positioning hole: 3 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
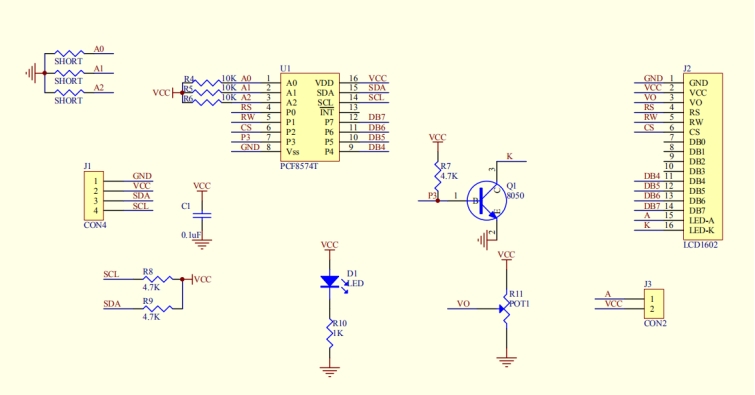
Pins of the LCD1602 Display:
Pin |
Symbol |
Pin Explanation |
|---|---|---|
1 |
VSS |
Ground |
2 |
VDD |
Positive pole of power |
3 |
V0 |
V0 is the LCD contrast adjustment terminal, |
4 |
RS |
RS is the register selection, |
5 |
RW |
RW is a read and write signal wire. |
6 |
E |
E(EN) is (enable)end, the information will be read when the level is high (1), |
7 ~ 14 |
D0 ~ D14 |
D0 ~D7 are 8-bit bidirectional data terminals. |
15 |
BLA |
Positive pole of backlight |
16 |
BLK |
Negative pole of backlight |
The LCD1602 display requires at least seven IO ports to drive up, occupying too many IO ports. However, it simplifies the wiring and saves IO ports via an adapter board.
Components
|
|
|
|
|---|---|---|---|
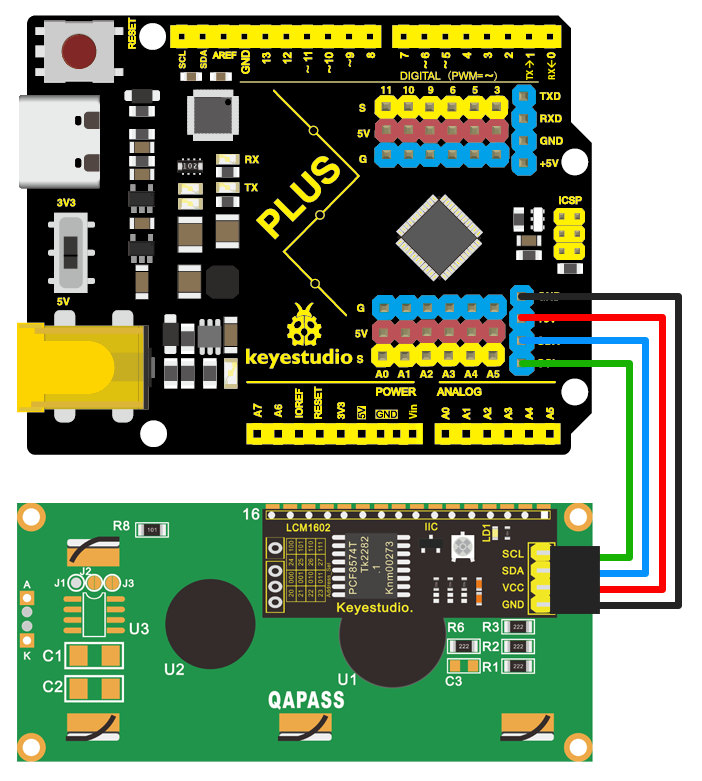
PLUS Main Boardx1 |
I2C LCD1602 Displayx1 |
4Pin 20cm Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.5LCD.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : LCD
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include<LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
void setup()
{
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop()
{
lcd.setCursor(2,0);
lcd.print("Hello World!");
lcd.setCursor(2,1);
lcd.print("Hello Keyes!");
}
Code Explanation
Code |
Explanation |
|---|---|
LiquidCrystal_I2C lcd(0x27,16,2); |
Initialize object name lcd, address is 0x27, 16 columns, 2 rows |
lcd.init(); |
Initialize LCD |
lcd.backlight(); |
Backlight |
lcd.clear(); |
Clear the display |
lcd.setCursor(2,0); |
Set starting coordinates on the display, third column, first row |
lcd.print(“Hello World!”); |
Print “Hello World!” from the starting coordinates set on the display |
Test Result
After the code is uploaded successfully, the first line of the LCD1602 display prints “Hello World! “, the second line prints “Hello Keyes! “.
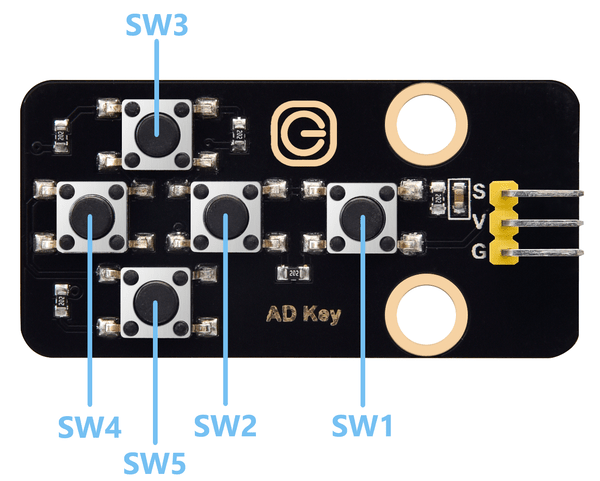
3.6 Five AD Key Module
The difference between the five AD key module and the single AD key module is that the single AD key module can only read the output low level when the key is pressed and the output high level when it is released. The five AD key module collects analog output. When different keys are pressed, the output voltage and analog output are different, and only one analog port is occupied, which saves resources.
Parameters
Working voltage: DC 3.3 ~ 5V
Current: 20 mA
Maximum power: 0.1W
Data type: Analog signal
Operating temperature: -10°C ~ +50°C
Dimensions: 47.6 x 23.8 x 9.3mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
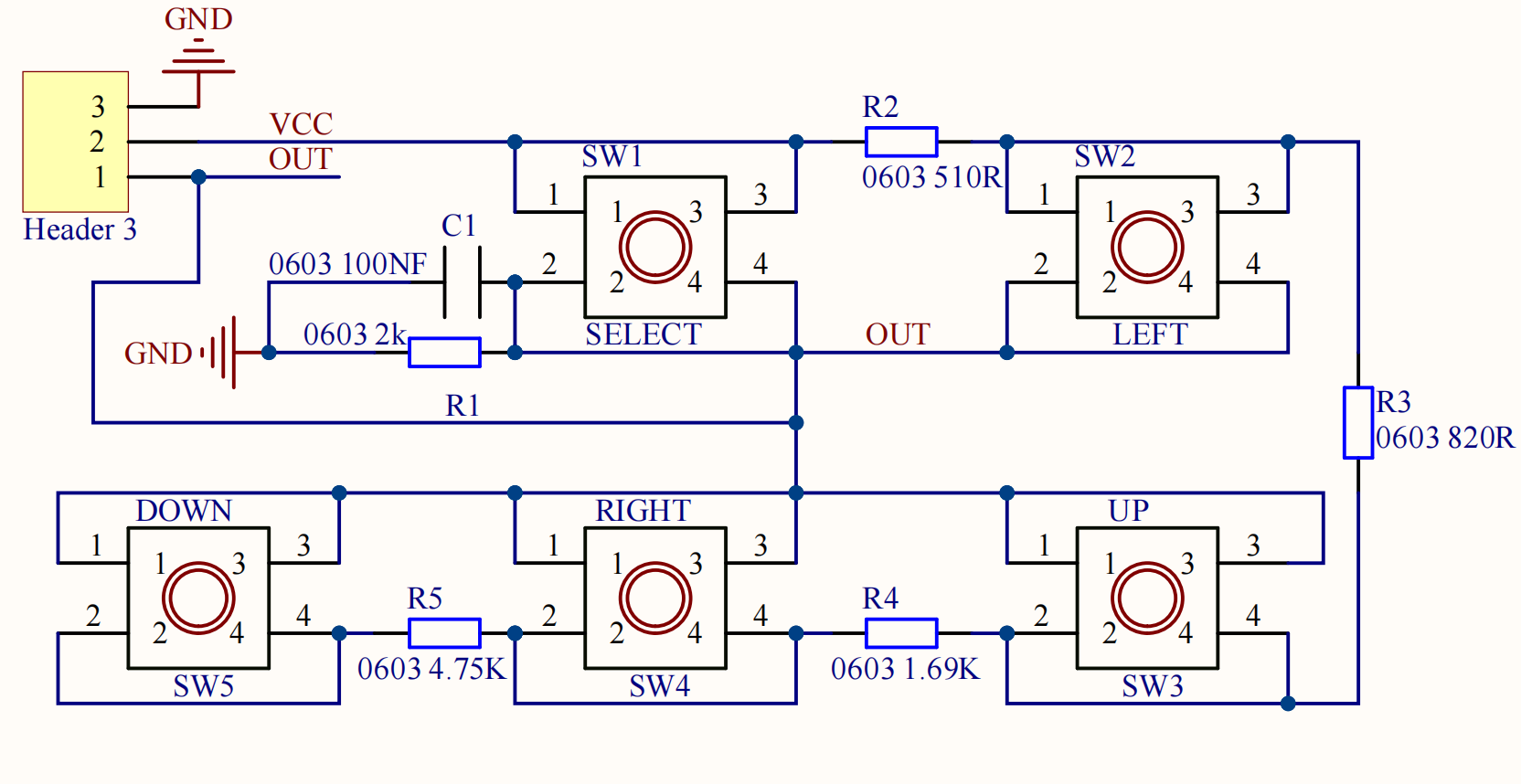
When the key is not pressed, the OUT output to the signal end S is pulled down by R1, then we read a low level of 0V.
When the key SW1 is pressed, the output OUT to the signal end S is equivalent to directly connecting to VCC, at this time we read a high level of 5V, the analog value is 1023.
When the key SW2 is pressed, the signal OUT terminal voltage we read is the voltage between R2 and R1, that is, VCC*R1/(R2+R1), which is about 3.98V, and the analog value is about 815.
When the key SW3 is pressed, the signal OUT terminal voltage we read is the voltage between R2+R3 and R1, that is, VCC*R1/(R3+R2+R1), which is about 3V, and the analog value is about 614.
When the key SW4 is pressed, the signal OUT terminal voltage we read is the voltage between R2+R3+R4 and R1, that is, VCC*R1/(R4+R3+R2+R1), which is about 1.98V, and the analog value is about 407.
When the key SW5 is pressed, the signal OUT terminal voltage we read is the voltage between R2+R3+R4+R5 and R1, that is, VCC*R1/(R5+R4+R3+R2+R1), which is about 1.02V, and the analog value is about 209.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
SK6812 RGB Module x1 |
3Pin 25cm Wire x1 |
USB Cable x1 |
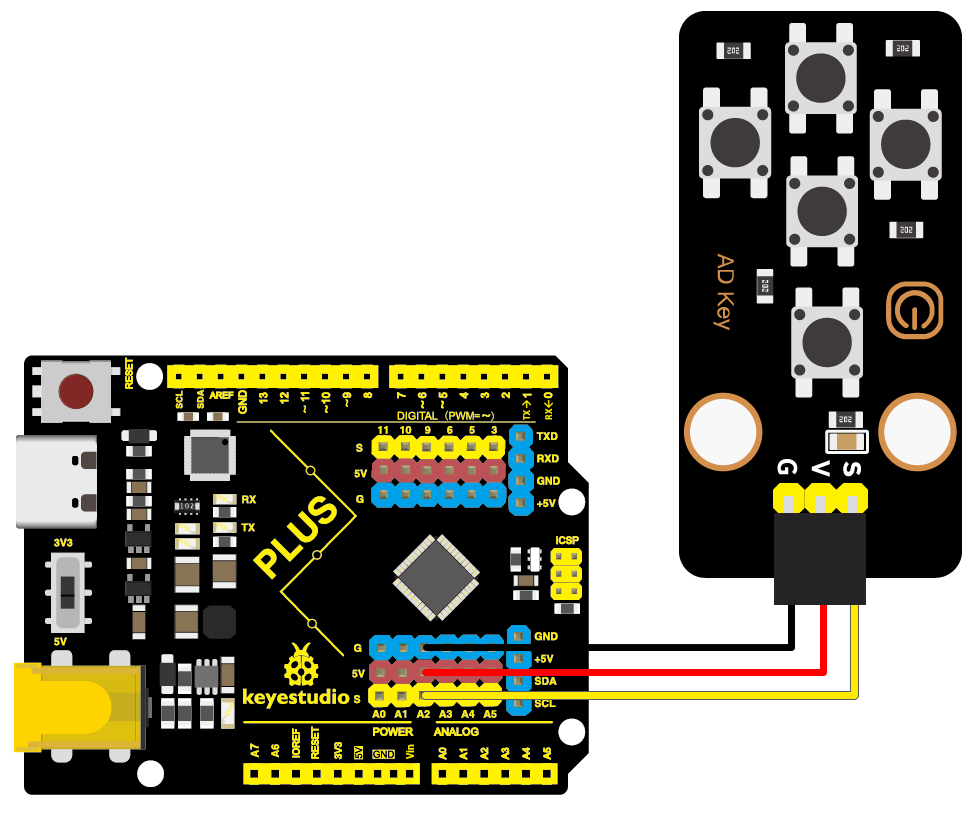
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.6AD_Key.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : AD_Key
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
int val = 0;
int ADkey = A2; //Define ADkey pins
void setup() {
Serial.begin(9600);
}
void loop() {
val = analogRead(ADkey);
Serial.print(val);
if (val <= 100) { //Val is less than or equal to 100 when no button is pressed
Serial.println(" No key is pressed");
} else if (val <= 300) { //When key 5 is pressed,val is between 100 and 300
Serial.println(" SW5 is pressed");
} else if (val <= 500) { //When key 4 is pressed,val is between 300 and 500
Serial.println(" SW4 is pressed");
} else if (val <= 700) { //When key 3 is pressed,val is between 500 and 700
Serial.println(" SW3 is pressed");
} else if (val <= 900) { //When key 2 is pressed,val is between 700 and 900
Serial.println(" SW2 is pressed");
} else { //When key 1 is pressed,val is greater than 900
Serial.println(" SW1 is pressed");
}
}
Code Explanation
Please refer to the previous code explanation.
Test Result
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600. When a key is pressed, the monitor prints the corresponding key information.
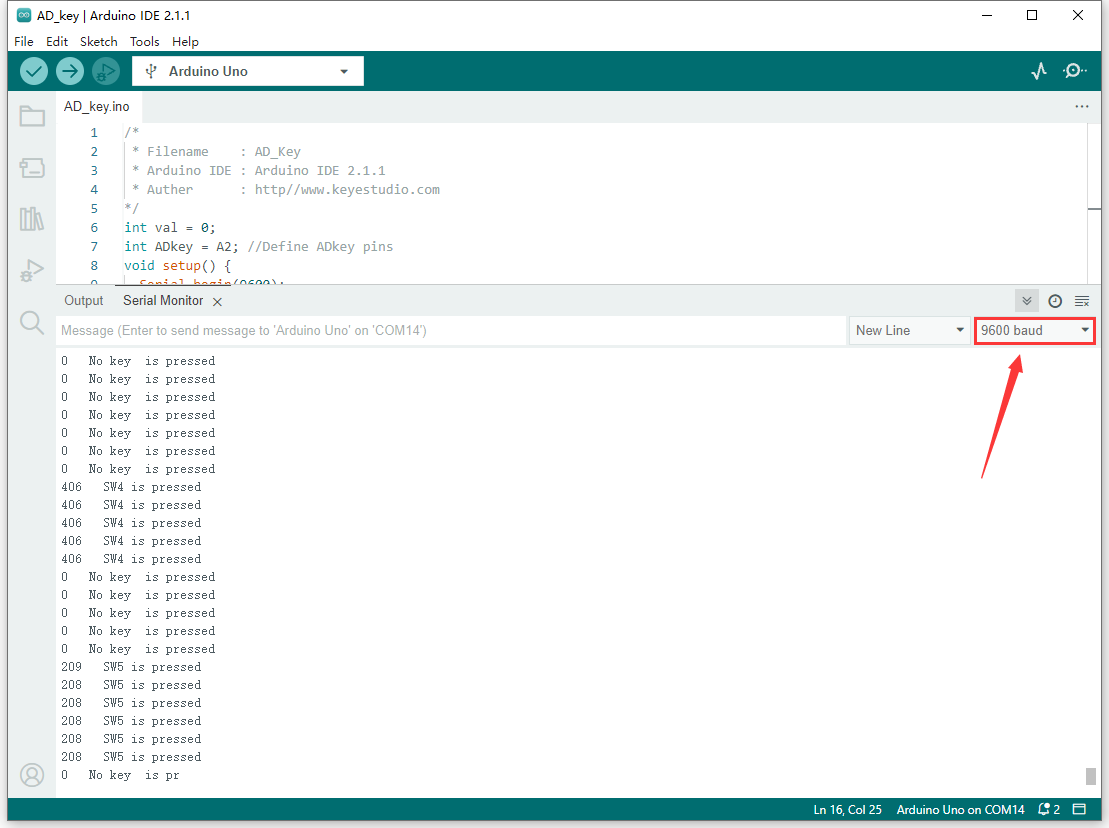
Q : What can we do if the serial monitor displays 1023 SW1 is pressed when SW2 is pressed?
A : Please flip the voltage switch on the main board to 5V and do the experiment again.
3.7 Soil Moisture Sensor
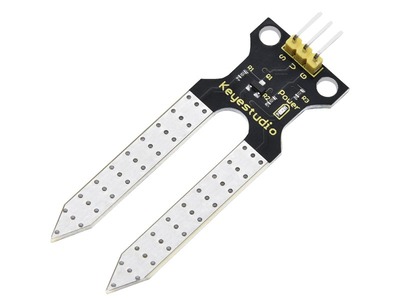
Soil moisture sensor is mainly used for measuring soil volumetric water content and soil moisture, agricultural irrigation as well as forestry protection. It is integrated into agricultural irrigation systems to help arrange water supplies efficiently, helping to reduce or enhance irrigation for optimal plant growth. Its surface is nickel-plated and has a wider sensing area to improve electrical conductivity, preventing rust in contact with soil and extending service life.
Parameters
Working voltage: DC 3.3 ~ 5V
Current: 44 mA (DC5V, when the soil module is shorted)
Output signal: analog signal
Operating temperature: -10°C ~ +50°C
Dimensions: 58 x 20 x 8 mm
Weight: 2.5g
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
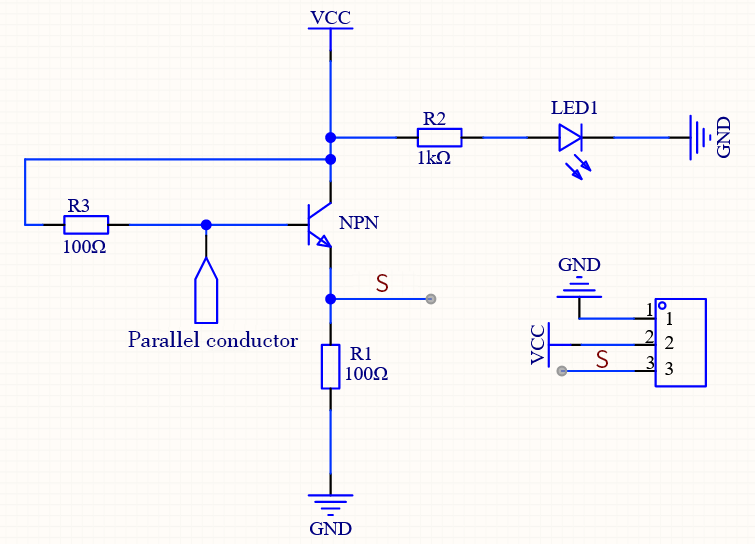
Schematic Diagram
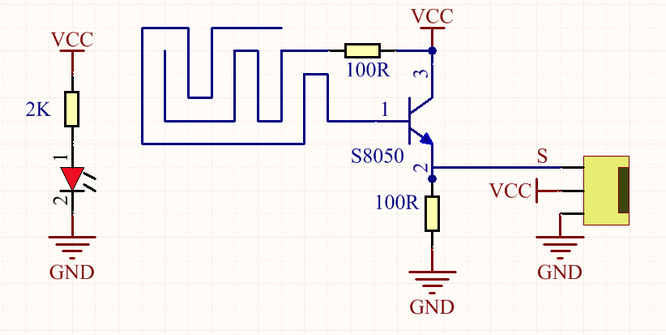
The soil moisture sensor uses a resistive method to measure soil moisture. Soil moisture will be measured according to the relationship between the conductivity of soil solution and soil moisture content.
When the soil moisture sensor probe is suspended, the triode (S8050) base is in an open state, and the cutoff output of the triode is 0. When it is inserted into the soil, the resistance value of the soil is different due to the different moisture content in the soil. The base of the triode provides a variable conduction current. The conduction current from the collector to the emitter of the triode is controlled by the base, and it will be converted into voltage after passing the puller resistance of the emitter. The more water content in the soil, the greater output voltage value will be.
Its hardware control circuit of the sensor is buried in the root of the crop to monitor the soil moisture in the root. The detection circuit of the sensor transmits the signals of “too high humidity” and “too low humidity” to the main controller via the encoder, and the main controller decides the control state.
Components
|
|
|
|---|---|---|
PLUS Main Board x1 |
Soil Moisture Sensor x1 |
|
|
|
|
2Pin 20cm F-F Dupont Wire x1 |
1Pin 30cm M-F Dupont Wire x1 |
USB Cable x1 |

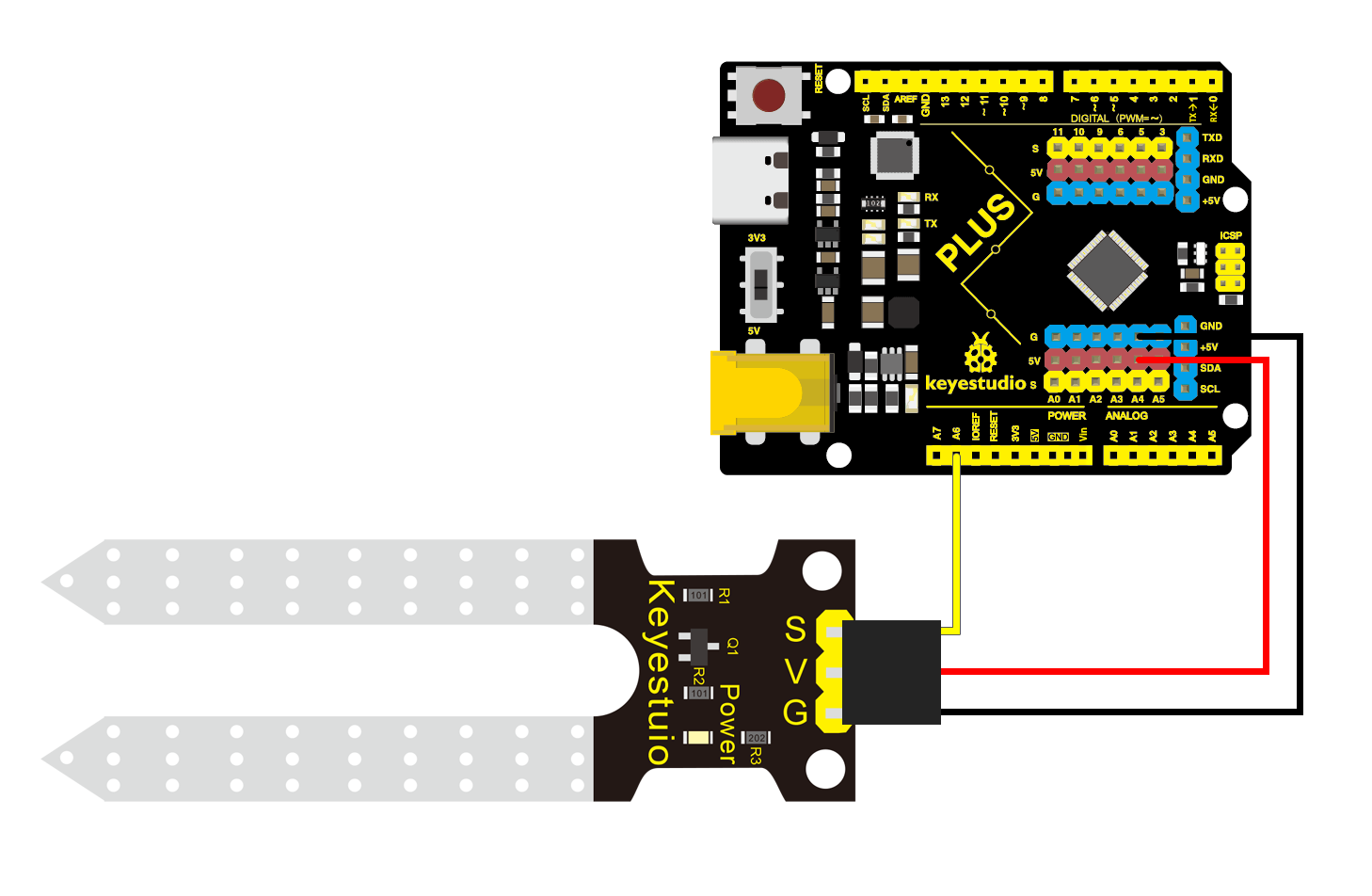
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
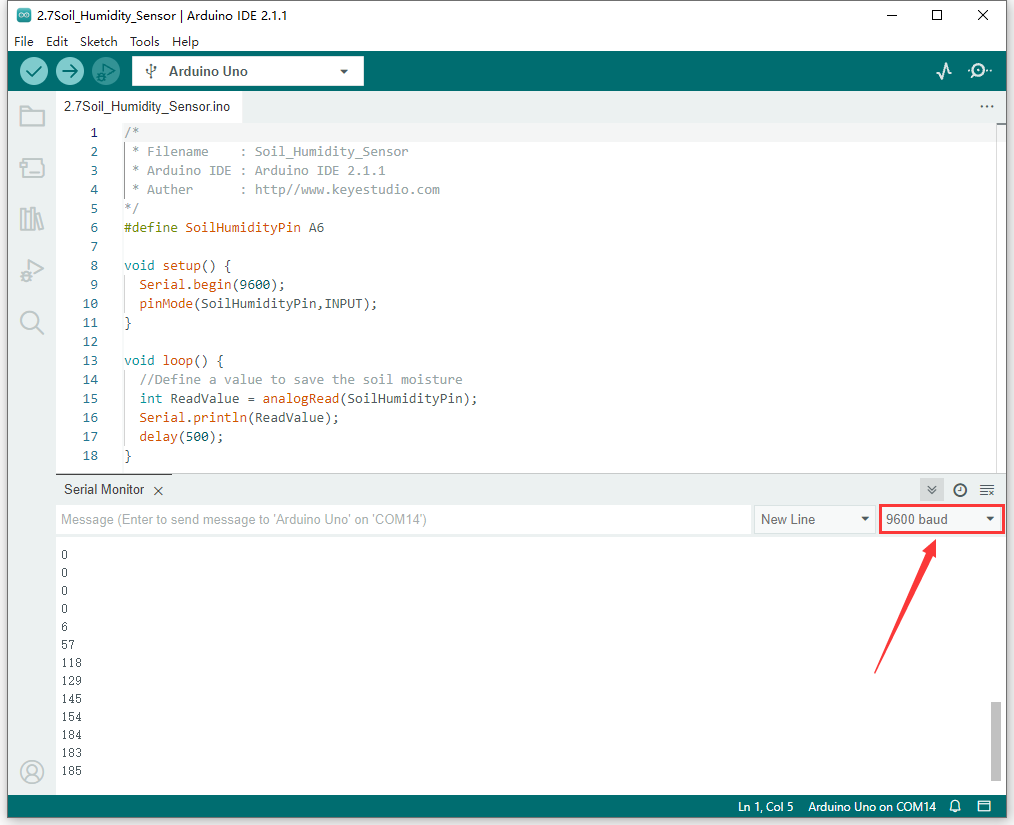
The code file 3.7Soil_Humidity_Sensor.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Soil_Humidity_Sensor
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define SoilHumidityPin A6
void setup() {
Serial.begin(9600);
pinMode(SoilHumidityPin,INPUT);
}
void loop() {
//Define a value to save the soil moisture
int ReadValue = analogRead(SoilHumidityPin);
Serial.println(ReadValue);
delay(500);
}
Code Explanation
Define the pin of the soil sensor as A6 and set the serial baud rate to 9600. Define an variable ReadValue, assign the analog value read by A6 pin to the ReadValue, then the value will be printed every 500ms in the serial monitor.
Test Result
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600. Touch the sensor with a wet finger, the we can read the humidity value.
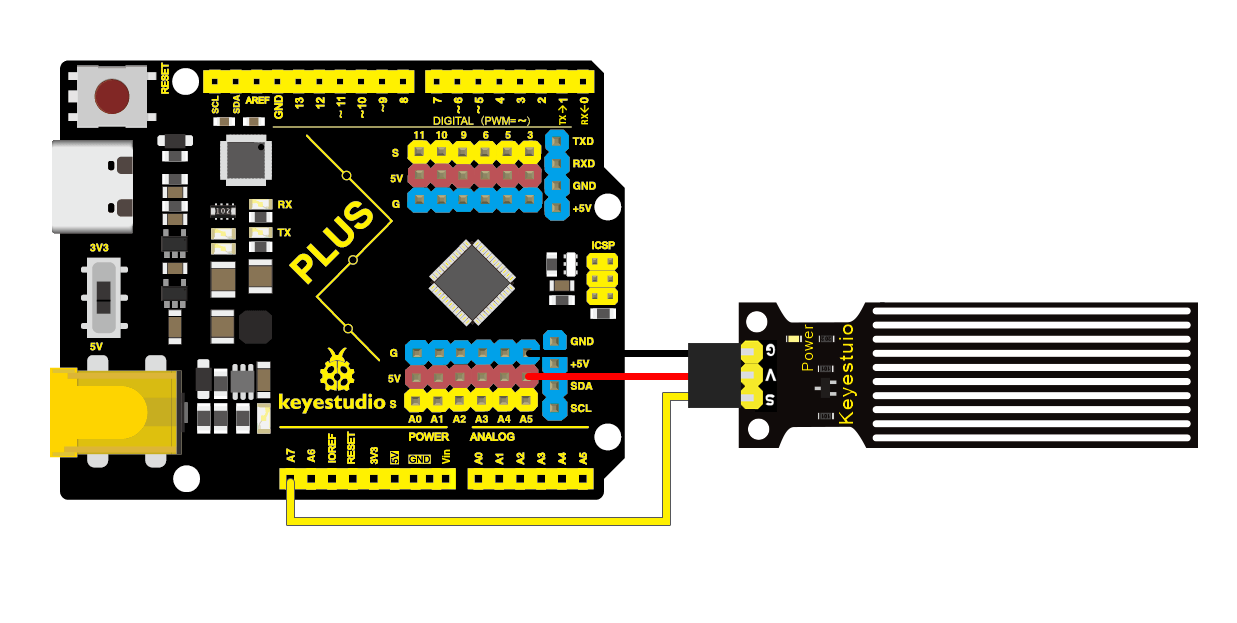
3.8 Water Level Sensor
Water level sensor measures the volume of water droplets and the amount of water by means of a trail of exposed parallel lines. Pure water conducts electricity very weakly and is an extremely weak electrolyte. Daily life water has more anions and cations due to the dissolution of other electrolytes to have a more pronounced conductivity, thus please use daily life water when doing experiments. It is not only smaller and smarter, but cleverly equipped with the following functions:
Smooth conversion between water and analog values
Strong flexibility, this sensor outputs basic analog values
Low power consumption and high sensitivity
Suitable for multiple development boards and controllers such as Aduino controllers, STC single-chip microcomputers as well as AVR single-chip microcomputers.
Parameters
Operating voltage : DC 5V
Operating current : < 20 mA
Output Signal : analog signal
Operating humidity : 10% ~ 90
Dimensions : 63 x 20 x 8 mm
Weight : 3.8 g
Dimension of positioning hole: 3.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
The water level sensor detects the amount of water through the exposed printed parallel lines on the circuit board.
It mainly utilizes the principle of current amplification of the triode: when the liquid level height makes the base of the triode and the positive pole of the power supply conductive, a certain size of current will be generated between the base of the triode and the emitter. At this time a certain magnification of the current will be generated between the collector and emitter of the triode, and the current will pass through the resistor of the emitter to generate the characteristic voltage, which will be collected by the AD converter. The more water there is, the more wires will be connected, and as the conductive contact area increases, the output voltage will gradually rise.
Components
|
|
|
|---|---|---|
PLUS Main Board x1 |
Water Level Sensor x1 |
|
|
|
|
2Pin 20cm F-F Dupont Wire x1 |
1Pin 30cm M-F Dupont Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
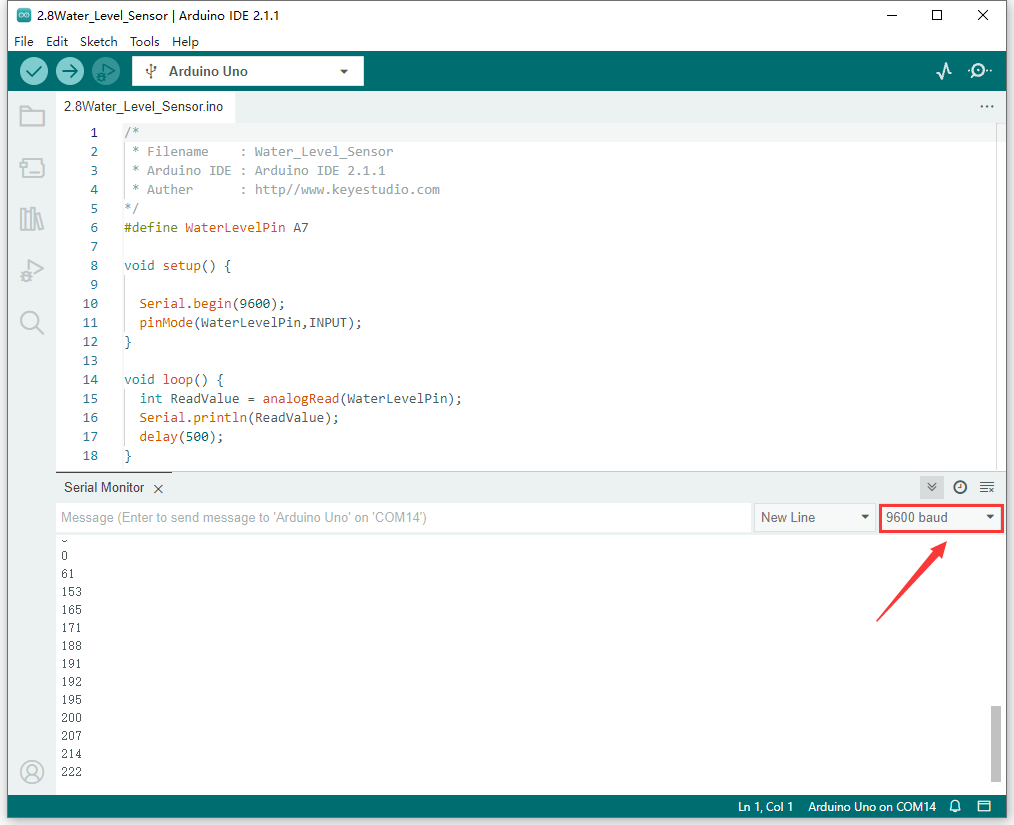
The code file 3.8Water_Level_Sensor.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Water_Level_Sensor
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define WaterLevelPin A7
void setup() {
Serial.begin(9600);
pinMode(WaterLevelPin,INPUT);
}
void loop() {
int ReadValue = analogRead(WaterLevelPin);
Serial.println(ReadValue);
delay(500);
}
Code Explanation
It is the same as the soil sensor.
Test Result
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600. Touch the sensor with a wet finger, the we can read the humidity value.
3.9 Single 5V Relay Module
Relay is an electrically controlled device, when the change of the input quantity reaches the specified requirements, the electrical output circuit controlled quantity will change in a predetermined way.
It has a control system and a controlled system, which is usually used in automated control circuits, and it plays a role in automatic regulation, safety protection as well as conversion circuit in the circuit. By the way, the relay is equivalent to a switch, which can be connected to any wire for control.

Parameters
Operating voltage : DC 5V
Current : 50 mA
Maximum power : 0.25 W
Input signal : digital signal
Contact current : less than 3 A
Operating temperature: -10°C ~ +50°C
Control signal : digital signal
Dimensions : 47.6 x 23.8 x 19 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
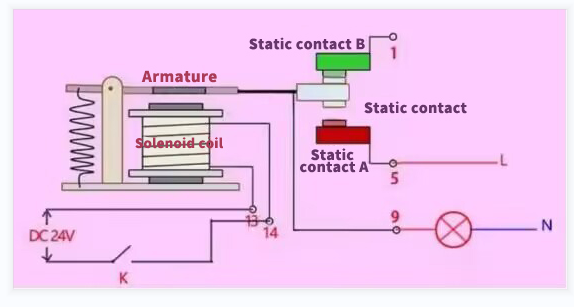
A relay has one moving contact and two static contacts A and B.
When switch K is disconnected, no current passes through the relay wire, at which point the moving contact makes contact with static contact B and the upper half of the circuit is energized. The static contact B is called normally closed (NC). NC(normal close) is normally closed, that is, the coil is closed without being energized.
When switch K is closed, the relay circuit is magnetized by current, at which time the moving contact makes contact with static contact A and the lower half of the circuit is energized. The static contact A is called normally open contact (NO). NO (normal open) is normally disconnected, that is, the coil is disconnected without being energized.
And the moving contact is also known as common contact (COM).
Relay is a switch, VCC means positive power, GND means negative power, IN means signal input pin, COM means common end, NC (normal close) means normally closed, NO (normal open) means normally open.
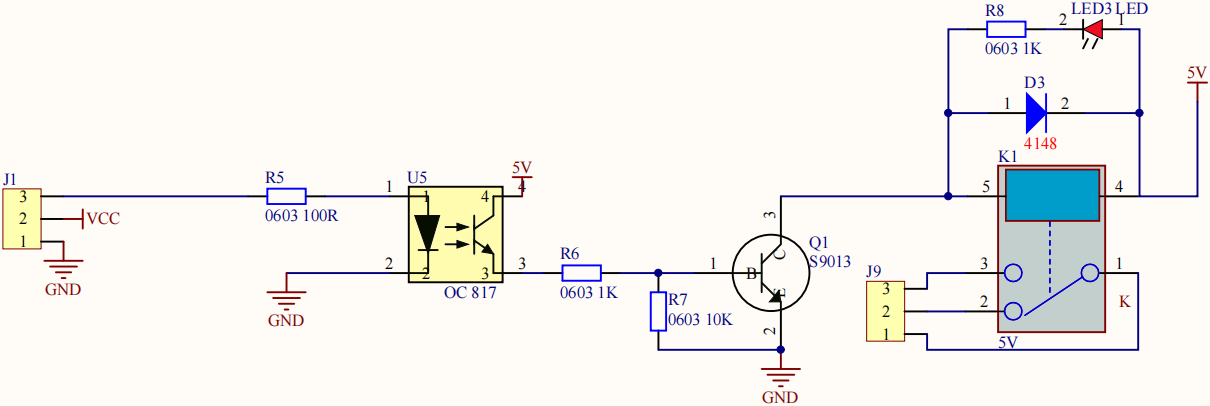
The relay, compatible with multiple microcontroller control boards, is an “automatic switch” that uses a small current to control the operation of a large current. It allows MCU control boards to drive loads below 3A, such as LED light strips, DC motors and miniature water pumps. The solenoid valve is a pluggable interface, which is easy to use.
Components
|
|
|
|
|---|---|---|---|
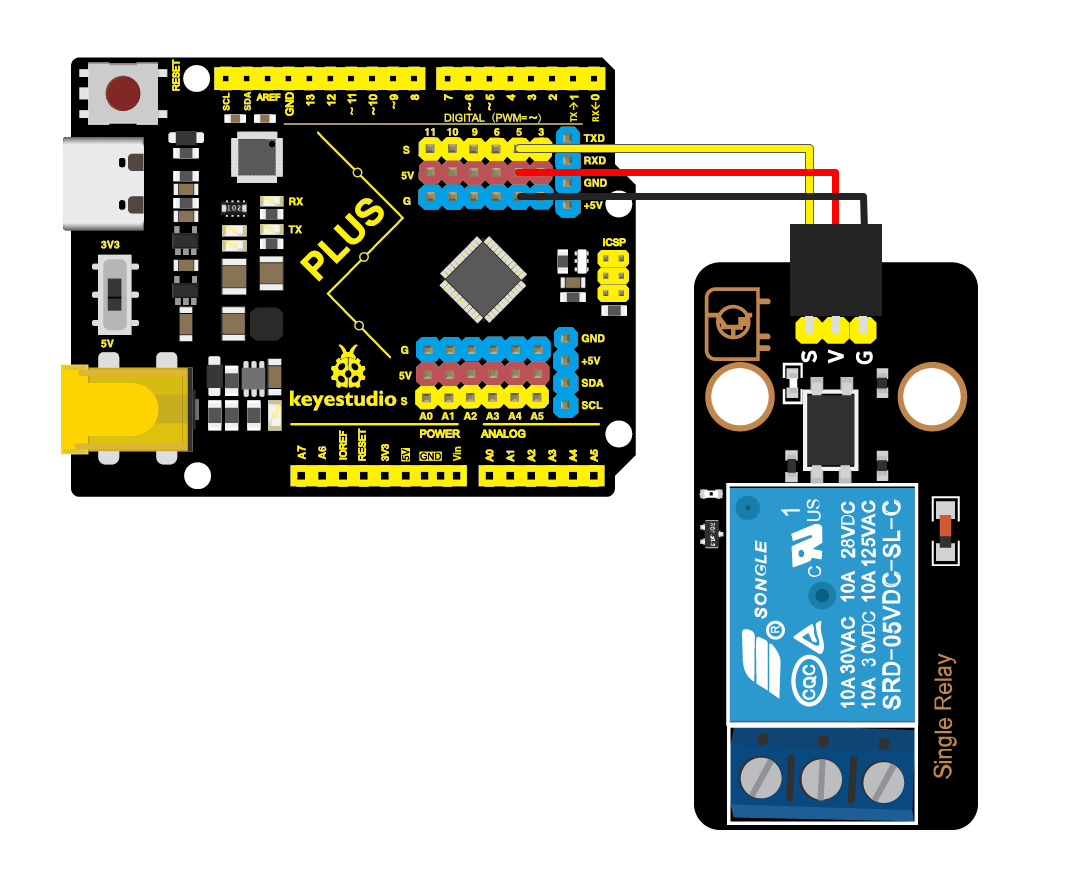
PLUS Main Boardx1 |
5V Relay Module x1 |
3Pin 20cm Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.9Relay.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Relay
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define RelayPin 5
void setup() {
Serial.begin(9600);
pinMode(RelayPin,OUTPUT);
}
void loop() {
if(Serial.available() > 0){
if(Serial.read() == 'd'){
digitalWrite(RelayPin,HIGH);
delay(500);
digitalWrite(RelayPin,LOW);
delay(500);
}
}
}
Code Explanation
Code |
Explanation |
|---|---|
Serial.available() |
When using the serial port, Arduino will open up a section of SRAM with a size of 64B, |
Serial.read() |
Serial.read() reads the first byte of the serial data buffer, |
Test Result
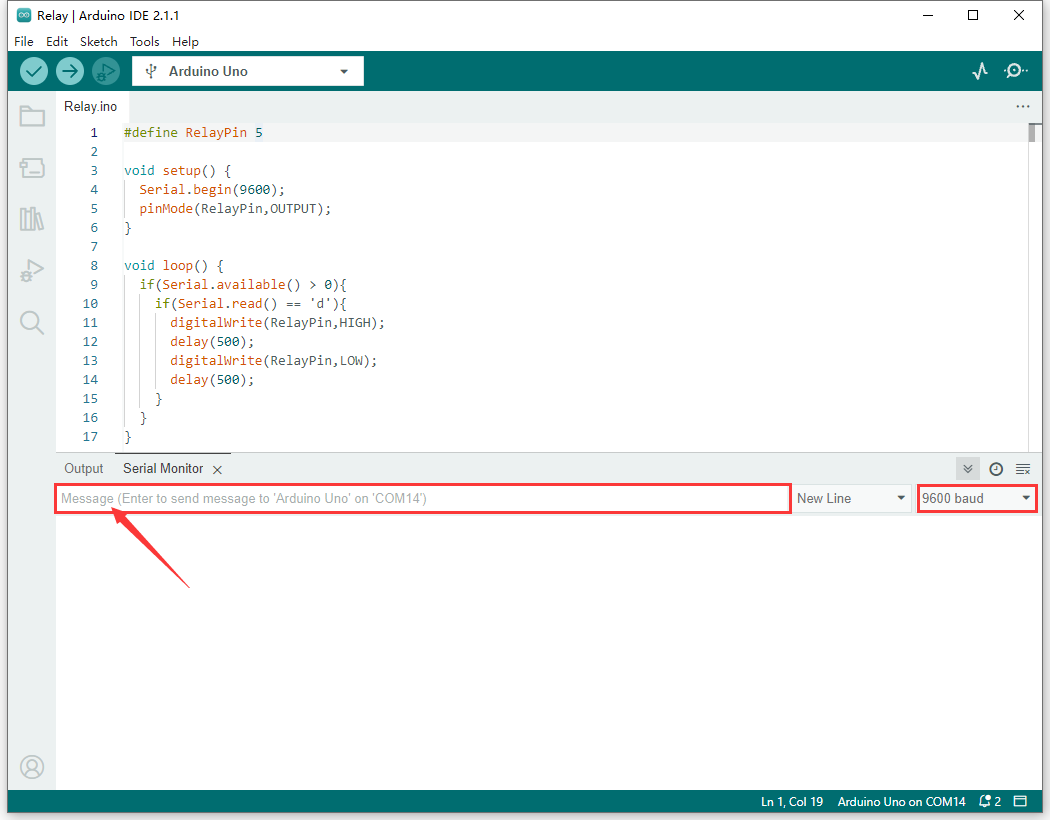
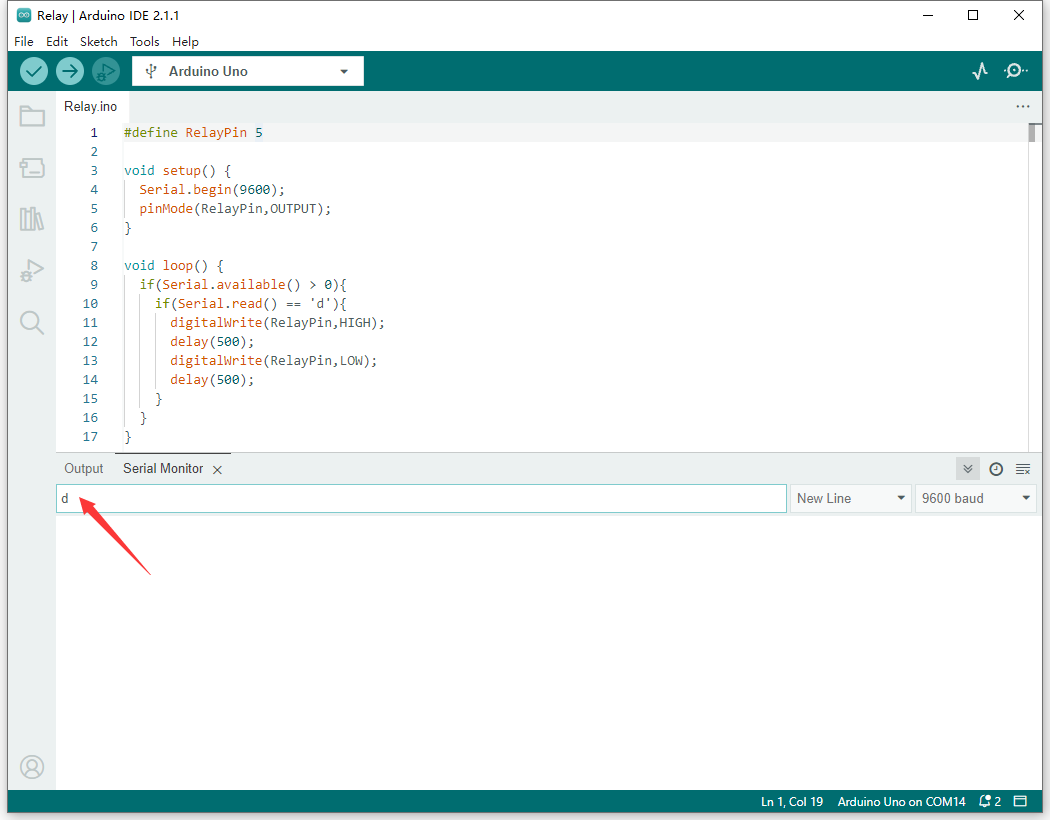
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600.
Enter the character “d “ in the input box and press “ ENTER “ on the keyboard to send, then you can see the red led on the relay blinking for 1s with the dynamic contact suction and release of the “ Tick “ sound. “
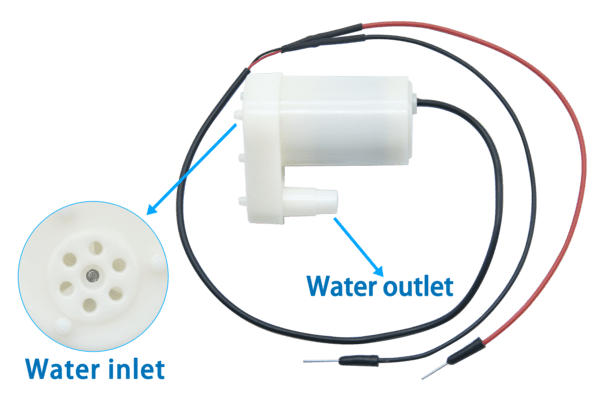
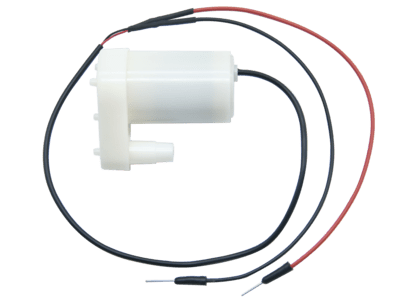
3.10 Water Pump
Note: Please use water carefully, do not spill water from the pool and soil cell. If water is spilled on other sensors, it will cause a short circuit when energized, affecting the normal operation of the device, if water is spilled on the battery, it will lead to danger of heat generation and explosion.
Thus,please be careful when using the device. Children must be supervised by their parents when using the kit. To ensure the safe operation of the device, follow the relevant user guides and safety regulations.
Parameters
Operating voltage : DC 3 ~ 5V
Current : 100 mA
Maximum current : 200 mA
Dimensions : 38.3 x 25.4 x 46.3 mm
Weight : 29.8 g
Schematic Diagram
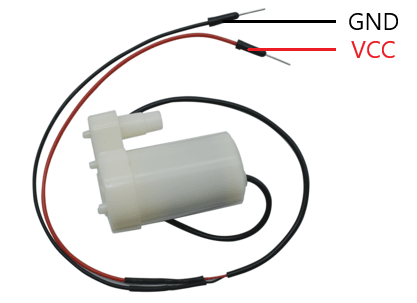
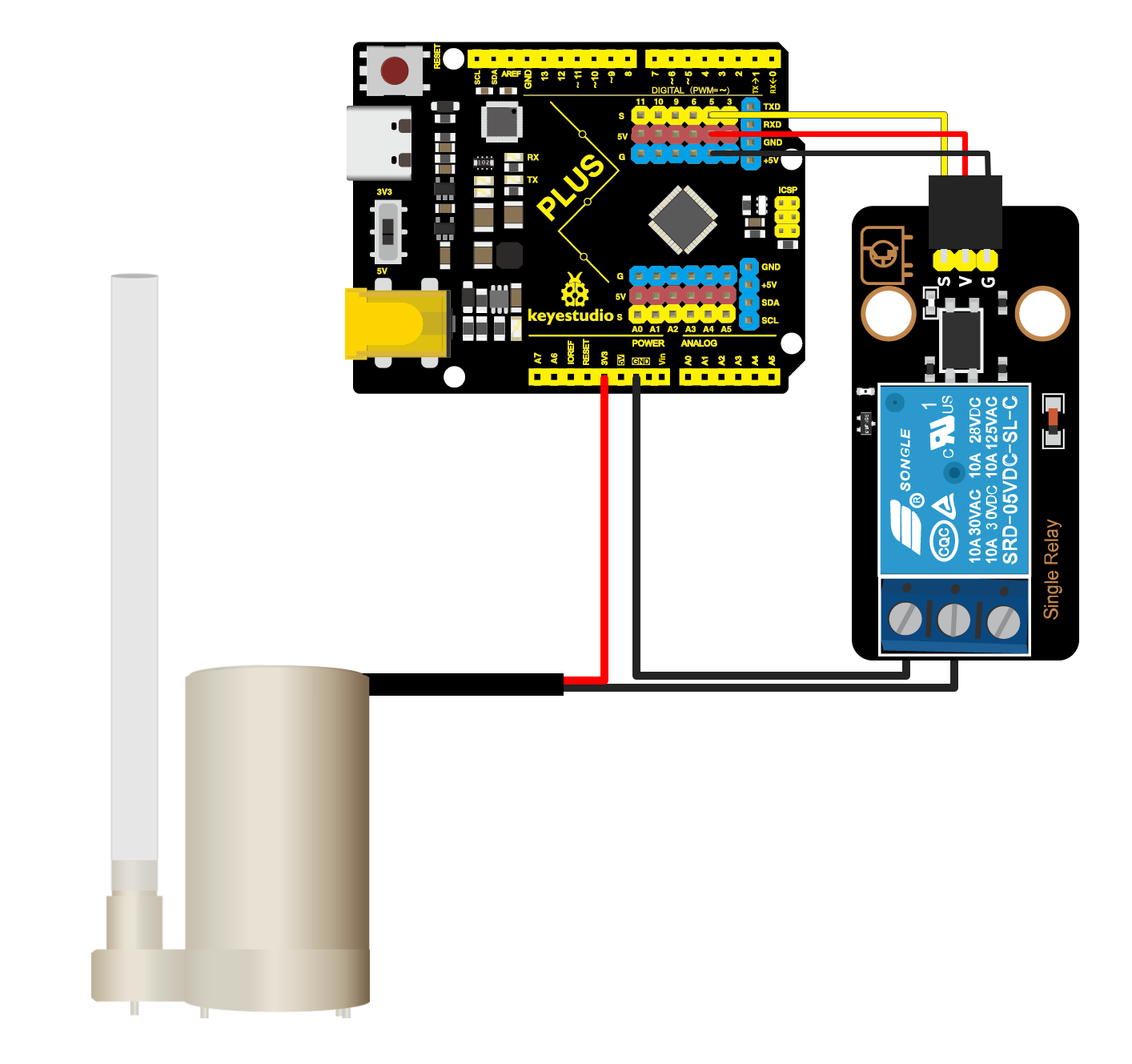
To drive the water pump, you just need to connect the VCC terminal of the water pump to the power terminal and the GND to GND terminal. The red VCC wire of the water pump is connected to the 3V3 power port of the motherboard, the black GND wire of the water pump is connected to the COM terminal of the relay, and the NO terminal of the relay is connected to the GND port of the motherboard. When driving the relay, COM and NO are closed, at this time the GND wires are connected, and the water pump conducts and starts to work.
Note:
Water pump is a DC pump, the voltage must be DC power supply (batteries labeled DC power supply and transformer). Voltage can be used only within the specified voltage range, and don’t use it over voltage.
It is prohibited to rotate without water for a long time.
It is prohibited to use in acidic and alkaline solution.
Don’t use it in liquids with impurities greater than 0.35 mm and magnetizing particles, if the water quality is too dirty, you need to clean up the impurities of the water pump.
Components
|
|
|
|---|---|---|
PLUS Main Board x1 |
Single 5V Relay Module x1 |
Water Pump x1 |
|
|
|
1Pin 22cm M-M Wire x1 |
3Pin 20cm Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
The code file for this lesson is still 3.9Relay.ino.
/*
* Filename : Relay
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define RelayPin 5
void setup() {
Serial.begin(9600);
pinMode(RelayPin,OUTPUT);
}
void loop() {
if(Serial.available() > 0){
if(Serial.read() == 'd'){
digitalWrite(RelayPin,HIGH);
delay(500);
digitalWrite(RelayPin,LOW);
delay(500);
}
}
}
Test Result
Note:Please use water carefully and control the direction of the water pipe and water flow, do not spill water on the motherboard or module,which will cause a short circuit and damage the motherboard and the module.
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600.
Enter the character “d “ in the input box and press “ ENTER “ on the keyboard to send, then the pump will pump water once. Enter “dd “ and send, it will pump water twice.
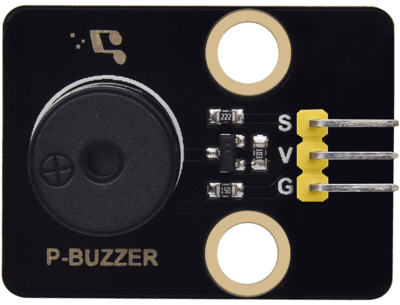
3.11 Passive Buzzer
The “source” of active and passive buzzers is vibration source.
An active buzzer has its own internal oscillator, thus it can produce sound once triggered, and the frequency of sound is stable. It features convenient program control and high sound pressure. DC power input passes through the amplifying and sampling circuit of the oscillation system to generate sound signal under the action of the resonant device.
However, a passive buzzer is a component without internal vibration source and it won’t make sound if it passes through the DC signal. Because the magnetic circuit is constant, the vibration diaphragm has been in the adsorption state, and it can not vibrate and make sound. According to different needs, we will drive it via square waves, and then change the frequency to achieve different sound effects.
Note: Active buzzer boasts internal vibration source, and the sound frequency is stable. Passive buzzer doesn’t boast the internal vibration and is driven by square waves, the sound frequency can be changed.
Parameters
Operating voltage : DC 3.3 ~ 5V
Current : 50 mA
Input signal : digital signal (square wave)
Dimensions : 32 x 23.8 x 9.7 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
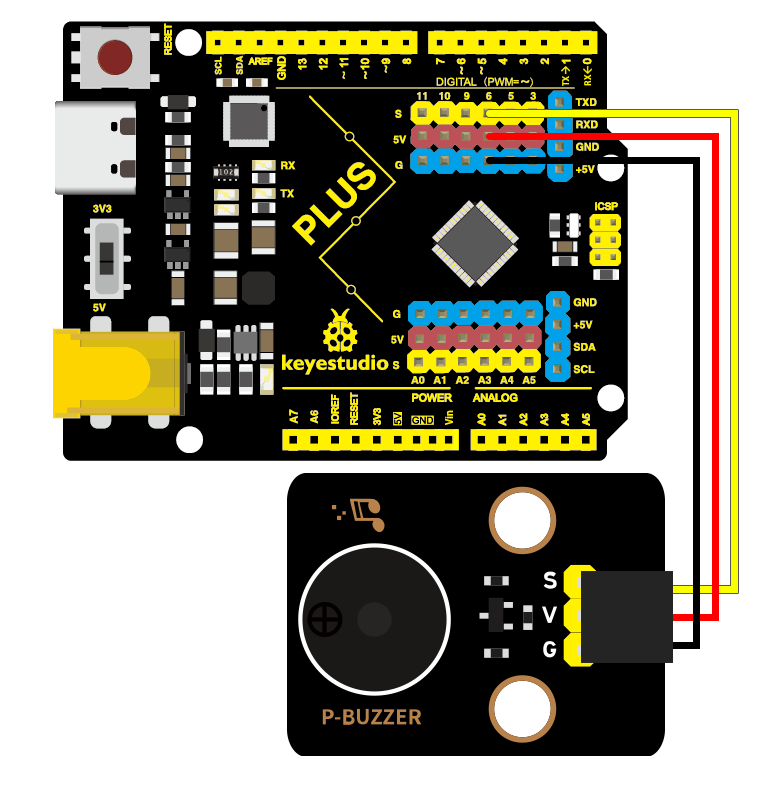
Schematic Diagram
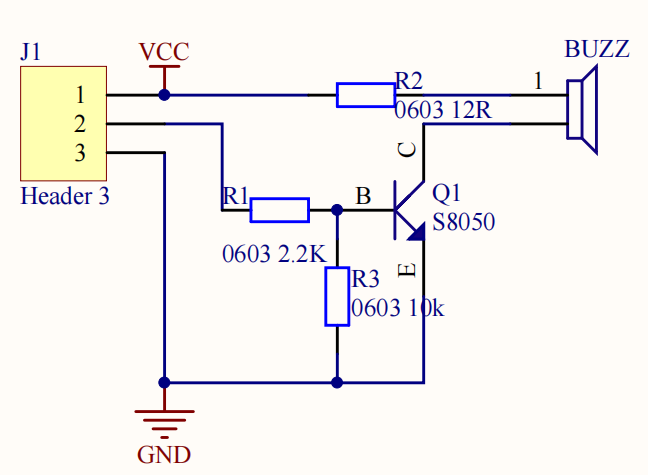
The sounding principle of a buzzer consists of a vibration device and a resonance device. Passive buzzer has no internal excitation source, and it makes sound via a certain frequency of the square wave signal. Different input square waves will produce different sound (the passive buzzer can simulate the tune to achieve musical effects).
Passive buzzer sound is mainly controlled by the pin to output PWM wave, and the frequency and duty cycle are important. The frequency of a PWM wave with the same duty cycle maybe different, the duty cycle determines voltage of the buzzer and loudness, while the frequency determines the tone.
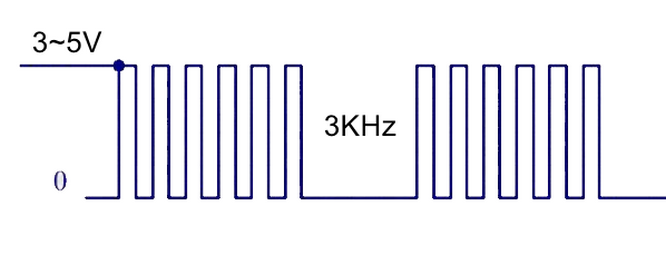
The level change of the pin can simulate a square wave, for example, a high level of the pin lasts for 500 us, and changes to a low level of 500 us, then changes to a high level. To drive a passive buzzer with a square wave of 200 to 5000 Hz, the Hz of the square wave can be calculated by the formula f=1/T, where f is the frequency and T is the time used for a complete cycle (the sum of the duration of each of the high and low levels).
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
Passive Buzzer x1 |
3Pin 20cm Wire x1 |
USB Cable x1 |
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.11Passive_buzzer.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Passive_buzzer
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define BuzzerPin 6 //Define the buzzer pin
void setup() {
pinMode(BuzzerPin,OUTPUT);
}
void loop() {
digitalWrite(BuzzerPin,HIGH);
delayMicroseconds(500); //delay500us
digitalWrite(BuzzerPin,LOW);
delayMicroseconds(500); //delay500us
}
Code Explanation
Code |
Explanation |
|---|---|
delayMicroseconds(500); |
delay 500us |
Test Result
Through f=1/T and 500us high and low level transformations, it can be known that the frequency of such a square wave is 1000Hz (the number of high and low level transformations per second is 1000 times).
After the code is successfully uploaded, the passive buzzer sounds at a frequency of 1000Hz.
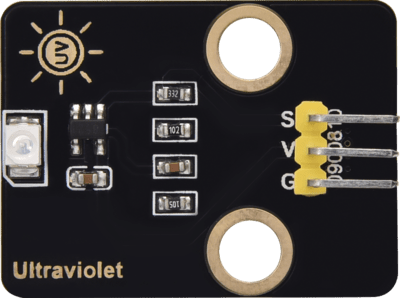
3.12 Solar Ultraviolet Sensor
The solar ultraviolet sensor uses the GUVA-S12SD chip. The output current of this sensor is proportional to the light intensity and the product output has a very high consistency. It is mainly used for the ultraviolet measurement in sunlight and UVA lamp intensity measurement, which is especially suitable for UVI detection.
Parameters
Supply voltage : 2.5V ~ 5V
Spectral detection range : 240 ~ 370 nm
Active area : \(0.076 mm^{2}\)
Response : 0.14 A/W (λ = 300 nm, \(U_{R}= 0V\) test condition)
Dark current : 1 nA ( \(U_{R}= 0.1V\) test condition)
Light current : 113 nA (UVA lamp, \(1 mW/cm^{2}\) test condition)
Light current : 26 nA (1 UVI test condition)
Temperature coefficient : 0.08 %/°C
Dimensions : 32 x 23.8 x 9.7 mm
Dimension of positioning hole: 4.8 mm in diameter
Port: 3-pin bent pin with a spacing of 2.54 mm
Schematic Diagram
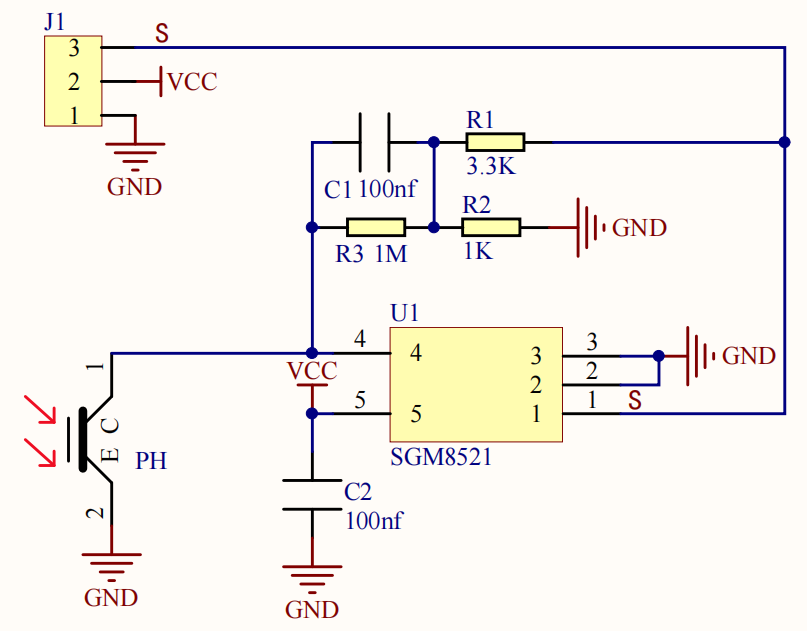
The ultraviolet sensor utilizes a photosensitive element to convert the UV signal into a measurable electrical signal through photovoltaic and photoconductive modes, with an output current proportional to the light intensity. The output electrical signal is output after amplification via an operational amplifier. The SGM8521 operational amplifier converts the current output of the sensor to voltage, and then amplifies the output so that an analog input on the main board can read the voltage to obtain a UV reading.
Components
|
|
|
|
|---|---|---|---|
PLUS Main Board x1 |
Solar Ultraviolet Sensorx1 |
3Pin 25cm Wire x1 |
USB Cable x1 |
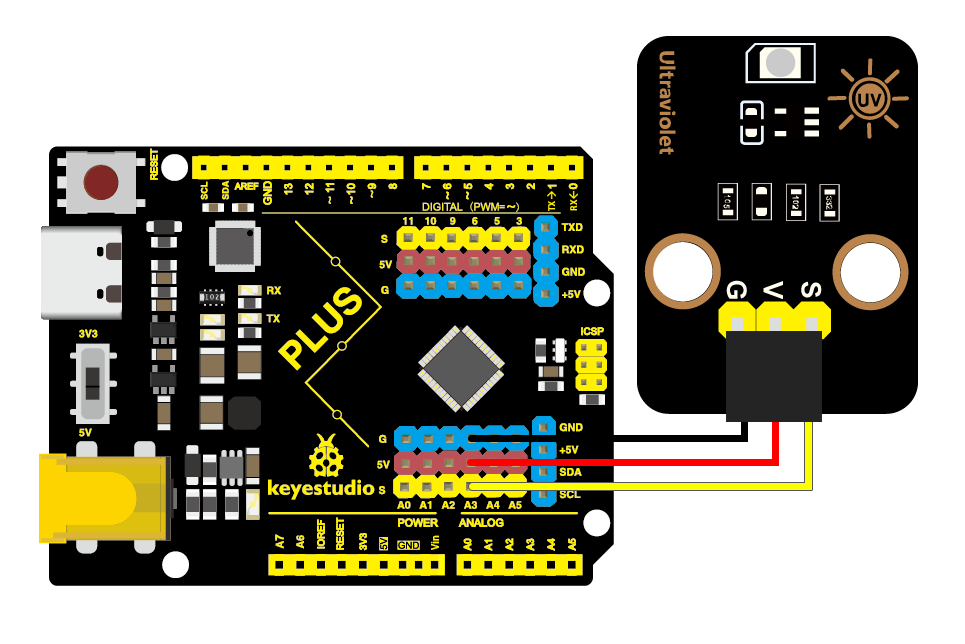
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 3.12Ultraviolet.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Ultraviolet
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
int sensorValue;//Packet output from the sensor
long sum = 0;
int vout = 0; //vout is the processed data, that is, the output voltage of photocurrent of ultraviolet sensor
int uv = 0; //UV Index
void setup(){
Serial.begin(9600);
}
void loop()
{
sensorValue = 0;
sum = 0;
for(int i = 0 ; i < 1024 ; i++ ) //filter algorithm
{
sensorValue = analogRead(A3); //Connect to pin A3
sum = sensorValue + sum;
delay(2);
}
vout = sum >> 10; //Start data processing
vout = vout * 4980.0 / 1024;
Serial.print("The Photocurrent value : ");
Serial.print(vout);
Serial.println("mV");
//The resulting photocurrent value is converted into an ultraviolet rating
if(vout < 50){
uv = 0;
}
else if(vout < 227){
uv = 1;
}
else if(vout < 318){
uv = 2;
}
else if(vout < 408){
uv = 3;
}
else if(vout < 503){
uv = 4;
}
else if(vout < 606){
uv = 5;
}
else if(vout < 696){
uv = 6;
}
else if(vout < 795){
uv = 7;
}
else if(vout < 881){
uv = 8;
}
else if(vout < 976){
uv = 9;
}
else if(vout < 1079){
uv = 10;
}
else{
uv = 11;
}
delay(20);
Serial.print("UV Index = ");
Serial.println(uv);
}
Code Explanation
Modifier Characters |
Description |
|---|---|
long |
It represents the scope of the variable, and is larger than int. long int can be shortened to long. |
Operator |
Description |
|---|---|
>> |
Binary right shift operator. |
<< |
Binary left shift operator. |
Arithmetic Operator |
Description |
|---|---|
++ |
Self-incrementing operator, increase an integer value by 1 |
– – |
Self-decreasing operator, decrease an integer value by 1 |
Code |
Description |
|---|---|
long sum = 0; |
Define a long int variable sum to hold the ADC sum, |
vout = sum >> 10; |
The value of sum is shifted ten bits to the right, |
vout = vout * 4980.0 / 1024; |
ADC values are converted to voltage values |
for( ){ } |
for loop, which executes a sequence of statements multiple times, |
Code Block Explanation
i++ and ++i
Knowledge
For ordinary independent statements, i++ and ++i are the same, both equal to i = i+1.
For assignment statements, i++ returns the original value of i, and ++i returns the value of i after adding 1.
For judging conditional expressions,
i++:Execute the judgment first and then add 1
++i:Add 1 first and then execute the judgment
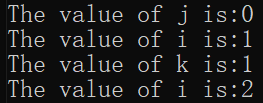
i++
i++:Assignment before self-increment,that is to calculate i++,calculate i first,then add 1. Note that the self-incremented i does not participate in the beginning of the computation, which is the latest i when the next calculation is performed. As shown below(Only the calculation principle, the detailed code is not explained):
#include <iostream>
#include <windows.h>
using namespace std;
int main(){
int i=0;
int j=i++;
SetConsoleOutputCP(CP_UTF8);
cout<<"The value of j is:"<<j<<endl;
cout<<"The value of i is:"<<i<<endl;
int k=i++;
cout<<"The value of k is:"<<k<<endl;
cout<<"The value of i is:"<<i<<endl;
return 0;
}
Operation result:
analysis:
① i = 0
② j = i++,j = i,then i = i+1,so j = 0,i = 1
③ k = i++,k = i =1,then i = i+1 =2
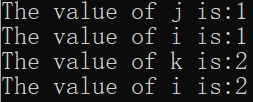
++i
++i: Self-increment before assignment, that is to calculate ++i, calculate i+1,Then assign this value to i.
As shown below(Only the calculation principle, the detailed code is not explained):
#include <iostream>
#include <windows.h>
using namespace std;
int main(){
int i=0;
int j=++i;
SetConsoleOutputCP(CP_UTF8);
cout<<"The value of j is:"<<j<<endl;
cout<<"The value of i is:"<<i<<endl;
int k=++i;
cout<<"The value of k is:"<<k<<endl;
cout<<"The value of i is:"<<i<<endl;
return 0;
}
Operation result:
analysis:
① i = 0
② j = ++i,i = i+1 = 1,then j:j = i+1 = 1,so j = 1,i = 1
③ k = ++i,i is 1,i = i+1 = 2,k = i+1 = 2,so k = 2,i = 2
for loop statement
for (expression 1; expression 2; expression 3)
{
statement;
}
Executive process:
Step 1: Execute expression 1.
Step 2: Execute expression 2. If its value is true, the embedded statement specified in the for statement is executed, and then step 3 is performed. If expression 2 is false, the loop ends and go to step 5.
Step 3: Execute expression 3.
Step 4: Execute step 2.
Step 5: At the end of the loop, execute the statement below the for statement.
“Expression 1” is executed only once, and the loop is among the “expression 2”, expression 3 “and” embedded statement”.
The simplest form of a for statement:
for (Initial value of loop variable; loop condition; Increment of loop variable)
{
statement;
}
Arithmetic average algorithm
Arithmetic average algorithm is a kind of classical filtering algorithm.
Method:
Take N samples consecutively for average operation:When N value is large, the signal smoothness is high, but the sensitivity is low. When N value is small, the signal smoothness is low, but the sensitivity is high.
Advantage:
It is suitable for filtering signals that generally have random interference. The signal has an average value, and fluctuates up and down around a certain numerical range.
Disadvantage:
It is not suitable for real-time control with slow measurement speed or fast data calculation speed, and it wastes RAM.
Binary right shift
Move all the binary bits of a number to the right by several bits, add 0 to the left of positive numbers, add 1 to the left of negative numbers, and discard the right one.
For binary values, moving n bits to the right is equal to dividing the original value by 2 to the n.
For example:
The binary value of 16 is 10000, and when shifted 1 bit to the right becomes 01000, it is the decimal number 8, which is equal to 16 divided by 2 to the first power.
The binary value of 16 is 10000, and when shifted 2 bits to the right, it becomes 00100, which is the decimal number 4, equal to 16 divided by 2 to the second power.
The binary value of 16 is 10000, shifted 4 bits to the right becomes 00001, which is the decimal number 1, equal to 16 divided by 2 to the fourth power.
ADC is converted to a voltage value
Resolution is the most basic parameter of the ADC and can be used to represent the number of bits per analog signal value.
Generally, the ADC will indicate how many bits (bits) it is, such as 8bit, 10bit or 16bit, and the value here is resolution. For example, the collected voltage range is 0 ~ 5V, then the minimum scale of the 8bit ADC is \(5/2^{8}= 0.0195V\) , the minimum scale of the 16bit ADC is \(5/2^{16}= 0.000195V\) , from these two values, the 16bit ADC can collect a smaller voltage. So the resolution here represents the smallest scale index of the ADC. Resolution is also only an indirect measure of the accuracy of ADC sampling. The direct measure of ADC acquisition accuracy is accuracy.
An n-bit ADC has \(2^{n}\) (2 to the n) outputs and \(2^{n-1}\) (2 to the n minus 1) interval, this interval is the smallest change in the input signal that the ADC chip can recognize.
Our PLUS board has six ADC channels: A0 ~ A5, which can be used as an analog voltage input, the six ADC have a 10-bit resolution, that is, there are \(2^{10}=1024\) outputs and \(2^{10}-1=1023\) intervals. This means that it maps the input voltage between 0 and 5V (ideal value) to an integer value between 0 and 1023, in units of \(5/1024 = 4.9mV\) (ideal value).
Instance analysis
sensorValue = 0;
sum = 0;
for(int i = 0 ; i < 1024 ; i++ ) //filter algorithm
{
sensorValue = analogRead(A3); //Connect to pin A3
sum = sensorValue + sum;
delay(2);
}
vout = sum >> 10; //Start data processing
vout = vout * 4980.0 / 1024;
This code uses the simplest filtering algorithm - arithmetic average algorithm. The for loop is used to find the sum of the analog values read by A3 port 1024 times, and the average value of the sum is found by binary right shift. Finally convert it to the voltage value (mV).
Details:
Set initial value:sensorValue = 0; sum = 0;
Enter the for loop, the purpose is to read the analog values read by A3 port 1024 times, and add them, then assign the value to sum :
Step1:execute int i = 0
Step2:
① Executei < 1024
② If its value is true, the embedded statement specified in the for statement is executed: the analog value read by port A3 is assigned to sensorValue, and then calculated sum = sensorValue + sum;,then execute Step3.
Step3:execute i++
Step4:execute Step2,ifi < 1024 conditions is not met,execute Step5.
Step5:Loop ends and executes the statement below the for statement.
vout = sum >> 10;:The binary value of sum is shifted ten bits to the right, which is equivalent to dividing the value of sum by 1024 (2 to the power of 10), which takes the average value, and then assigns the average value to vout.
vout = vout * 4980.0 / 1024;:The average value is converted to the corresponding voltage value.
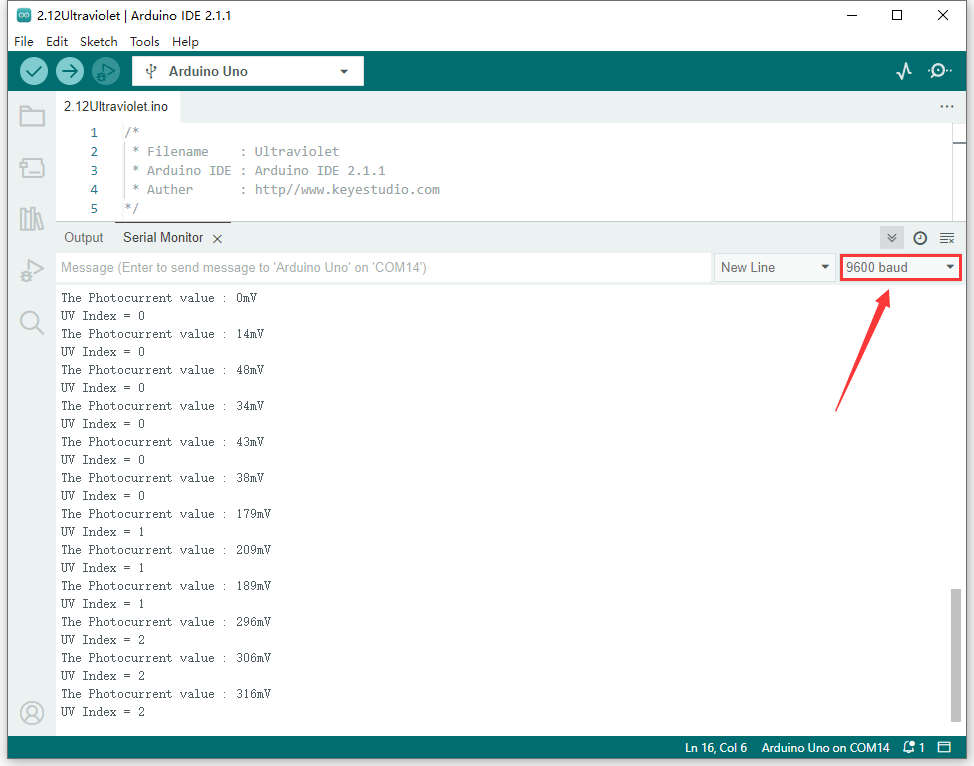
Test Result
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600. Then the serial monitor prints the UV level detected at this time.
4. Product Assembly
5. Projects
5.1 Energy-efficient Lighting

Energy-efficient lighting helps reduce carbon emissions and electricity consumption, which is a ideal way to tackle climate change and reduce environmental pollution. Traditional lighting fixtures consume more electricity, while its production is often associated with the burning of coal or fossil fuels, which produces large amounts of carbon dioxide emissions.
By and large, it empowers to save energy, reduce carbon emissions, light pollution and the use of toxic substances, as well as extend resources of life. Importantly, it contributes to sustainable development and reduce energy consumption and environmental impact.
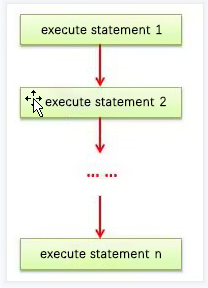
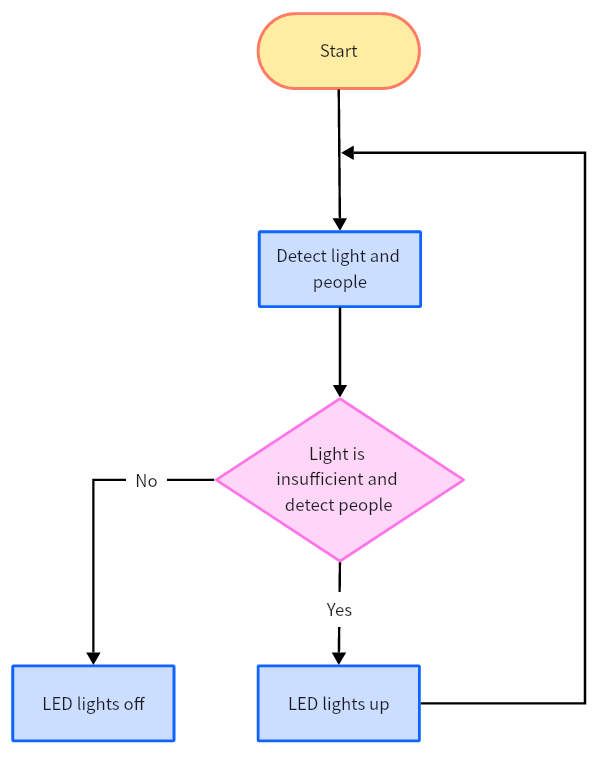
Flow Chart
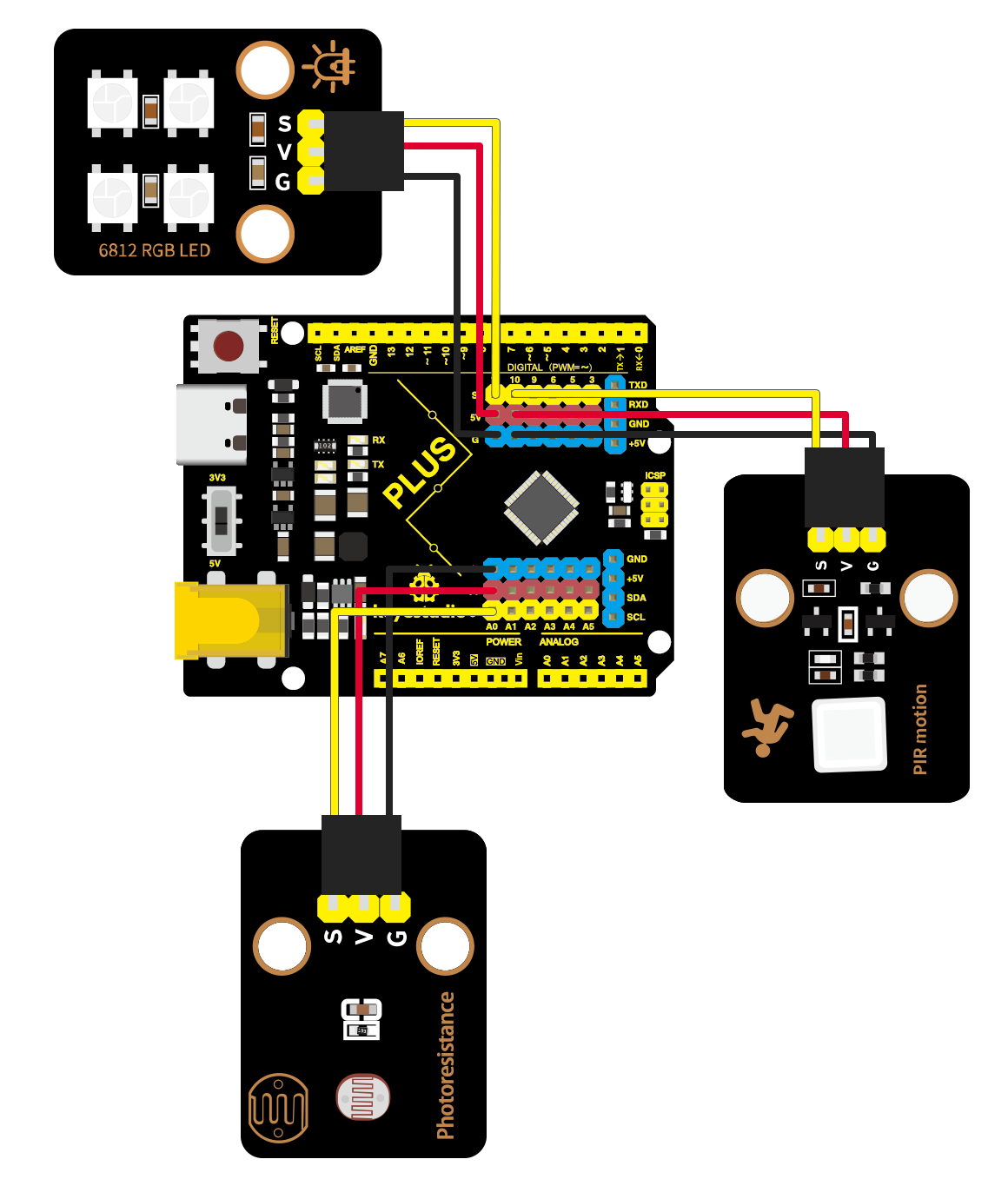
The photosensitive module detects the ambient light value and the PIR motion sensor detects whether there is someone in the environment. The LED will be on when insufficient light and people are detected, otherwise it will be off.
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.1Energy_efficient_Lighting.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Energy_efficient_Lighting
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
//Add the RGB6812 library file
#include <Adafruit_NeoPixel.h>
#define PIN 11 // The pin on the Arduino is connected to the NeoPixels.
#define NUMPIXELS 4 // Popular NeoPixel ring size.
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); // Defining rgb_display functions.
int photoPin = A0; //Photoresistance
int pirPin = 10; //PIR motion
int val = 0; //The value of the Photoresistance sensor
int value = 0; //The value of the PIR motion sensor
void setup(){
Serial.begin(9600);
pinMode(pirPin,INPUT);
pinMode(photoPin,INPUT);
rgb_display.begin(); //Start 6812RGB
rgb_display.setBrightness(100); //Set the brightness to 100. The value ranges from 0 to 255
}
void loop(){
val = analogRead(photoPin);
value = digitalRead(pirPin);
Serial.print(val);
Serial.print(" ");
Serial.print(value);
delay(100);
if(val < 200 && value == 1){
colorWipe(rgb_display.Color(255, 255, 255), 50); // On
Serial.println(" Led on");
delay(100);
}else{
colorWipe(rgb_display.Color( 0, 0, 0), 50); // Off
Serial.println(" Led off");
delay(100);
}
}
void colorWipe(uint32_t color, int wait) {
for(int i = 0; i < rgb_display.numPixels(); i++) { // For each pixel in strip...
rgb_display.setPixelColor(i, color); // Set pixel's color (in RAM)
rgb_display.show(); // Update strip to match
delay(wait); // Pause for a moment
}
}
Code Explanation
Relational operator |
Description |
|---|---|
> |
Check whether the value of the left operand is greater than the value of the right operand, |
< |
Check whether the value of the left operand is less than the value of the right operand, |
Logical operator |
Description |
|---|---|
&& |
Logic and operators. If both operands are true, the condition is true. |
Code |
Explanation |
|---|---|
#include <Adafruit_NeoPixel.h> |
It is used to control and manage 6812 RGB LED |
#define PIN 11 |
Pin on the Arduino that connected to the NeoPixels |
#define NUMPIXELS 4 |
NeoPixels Pixel size (number of LEDs) |
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); |
Define the rgb_display function |
rgb_display.begin(); |
Initialize the rgb_display function |
rgb_display.setBrightness(100); |
Set the brightness to 100 and the range is 0 -255 |
rgb_display.setPixelColor(i, color); |
Set the LED and color |
rgb_display.show(); |
Output function, after each setting we need to call it for output, otherwise there is no result. |
Code Block Explanation
Custom Functions
Classification of functions in C language:
Library functions
Custom functions
Library functions are functions encapsulated into libraries for users to use. The method is to compile some commonly used functions into a file for different people to call. Custom functions are very similar to library functions, which contain return values, function types and function parameters.
Structure of custom functions:
ret_type fun_name(variable )
{
statement ;
}
ret_type is the return type of the function;
fun_name is the name of the function;
variable is the variable of the function;
statement is the body of a function with braces.
Instance analysis(1)
void colorWipe(uint32_t color, int wait) {
for(int i = 0; i < rgb_display.numPixels(); i++) { // For each pixel in strip...
rgb_display.setPixelColor(i, color); // Set pixel's color (in RAM)
rgb_display.show(); // Update strip to match
delay(wait); // Pause for a moment
}
The function colorWipe is used to set all leds to the same color via a for loop.
Details:
The return type of the function is void, which is an untyped function.
The function name is colorWipe
The variables of the function are uint32_t color and int wait
The for loop is the body of the function
Enter the for loop to set all the leds to the same color:
Step1:execute int i = 0
Step2:
① execute i < rgb_display.numPixels(),rgb_display.numPixels() is the number of led
② If its value is true, the embedded statement specified in the for statement is executed: set the color of the first i led to color, output the function, delay wait seconds, and then perform step 3.
Step3:execute i++
Step4:execute Step2,if i < rgb_display.numPixels() conditions is not met,execute Step5.
Step5:loop ends.
Instance analysis(2)
if(val < 200 && value == 1){
colorWipe(rgb_display.Color(255, 255, 255), 50); // On
Serial.println(" Led on");
delay(100);
}else{
colorWipe(rgb_display.Color( 0, 0, 0), 50); // Off
Serial.println(" Led off");
delay(100);
}
This code uses a dual-branch structure to judge, the led will be on only when val < 200and value == 1 are met.
Details:
Judge if val < 200 and value == 1 are met,if so, executecolorWipe(rgb_display.Color(255, 255, 255), 50);,set RGB value of all leds to 255,leds light up with white color,and the serial monitor prints Led on and wrap line, otherwise execute colorWipe(rgb_display.Color( 0, 0, 0), 50);,leds light off,and the serial monitor prints Led off,and wrap line.
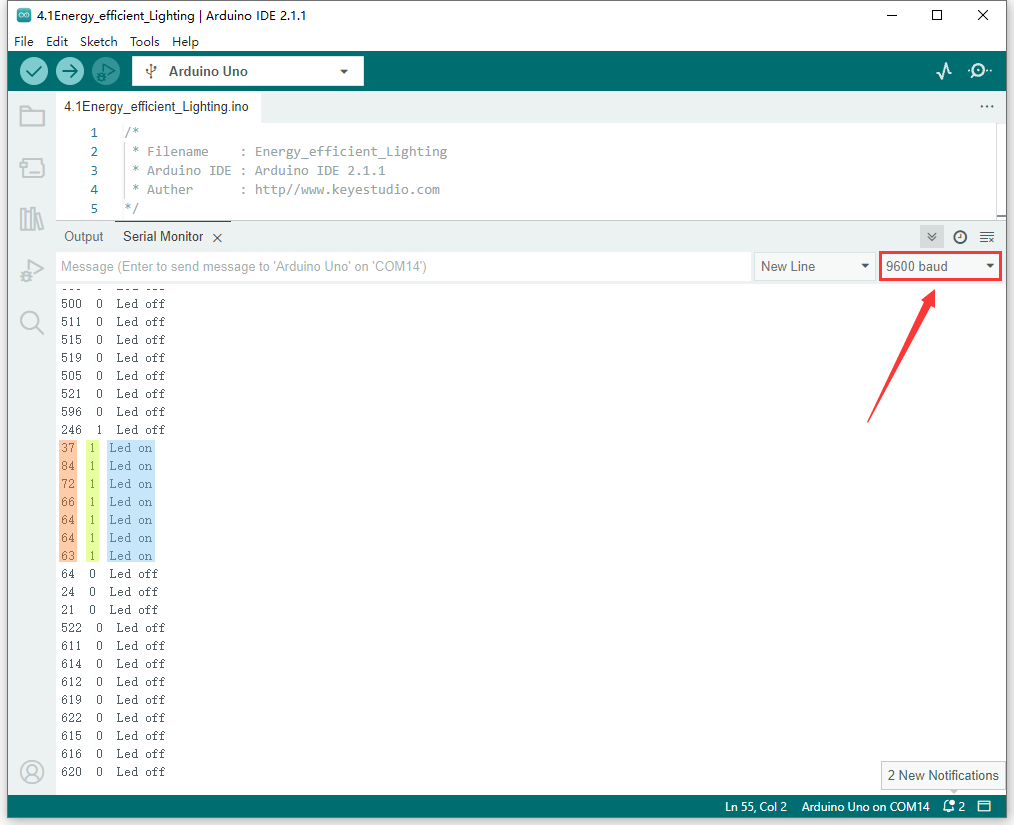
Test Result
After the code is uploaded successfully, open the serial monitor and set the baud rate to 9600. Then the serial monitor prints the analog value corresponding to the light intensity in the environment, the digital level value detected by the PIR motion sensor, and the LED state.
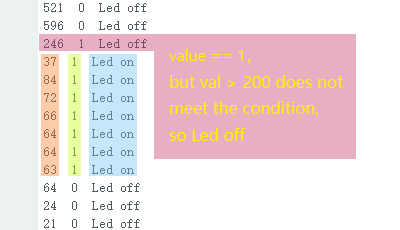
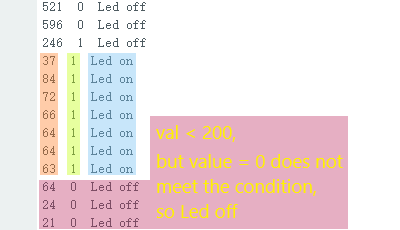
The LED will only be on if val < 200 (analog value corresponding to the light intensity) and value == 1 (a person is detected).
5.2 Plant Light System
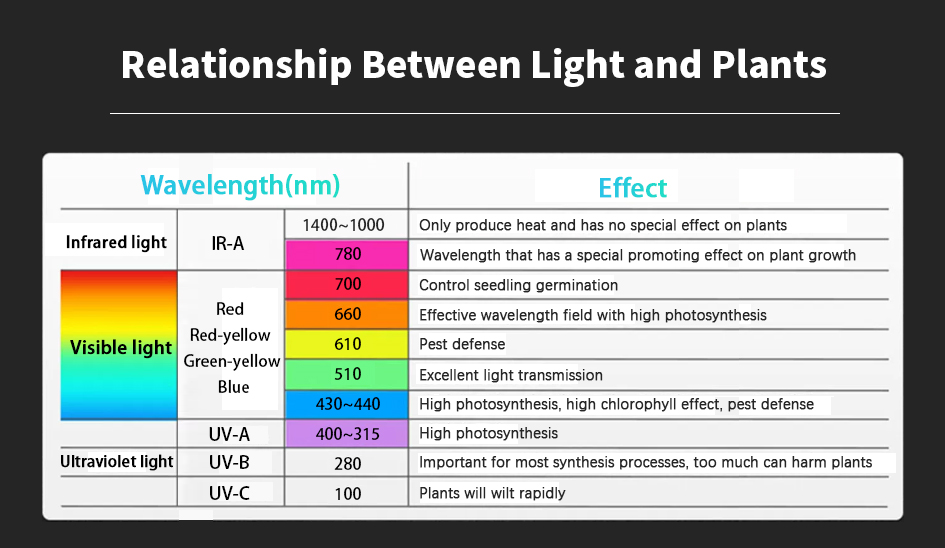
Photosynthesis is a prerequisite for plant growth, plants can absorb various wavelengths of light in photosynthesis, but the most absorbed are red light and blue-violet light. Chlorophyll mainly absorbs red and blue-violet light, including chlorophyll a and b. Carotenoids mainly absorb blue-violet light, including carotene and lutein. Blue light promotes the growth of plant roots, stems, and leaves. Red and orange light provide nutrients to chlorophyll.
In this project, we are going to make a simple plant light. Turn on the visible light that the plant needs via a button.
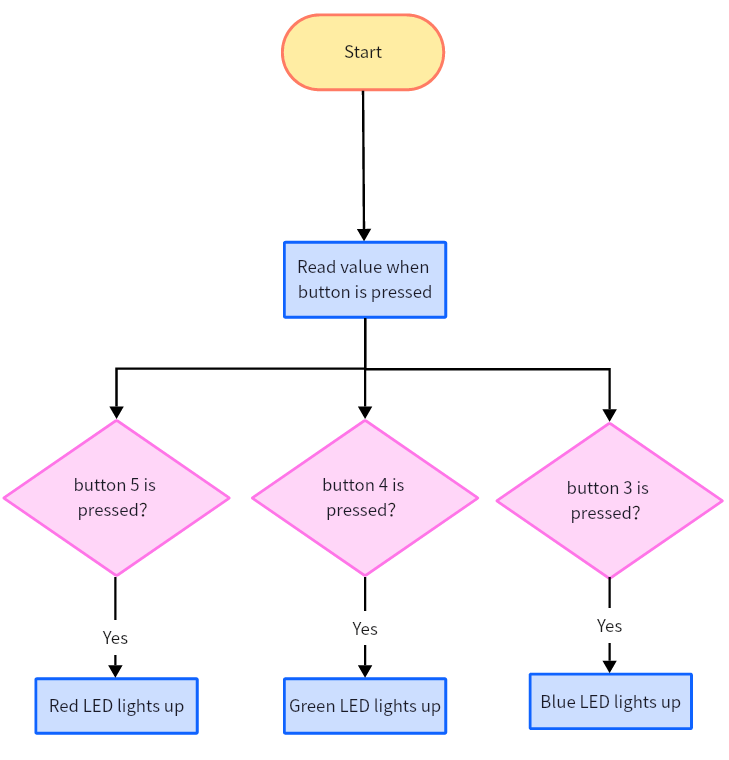
Flow Chart
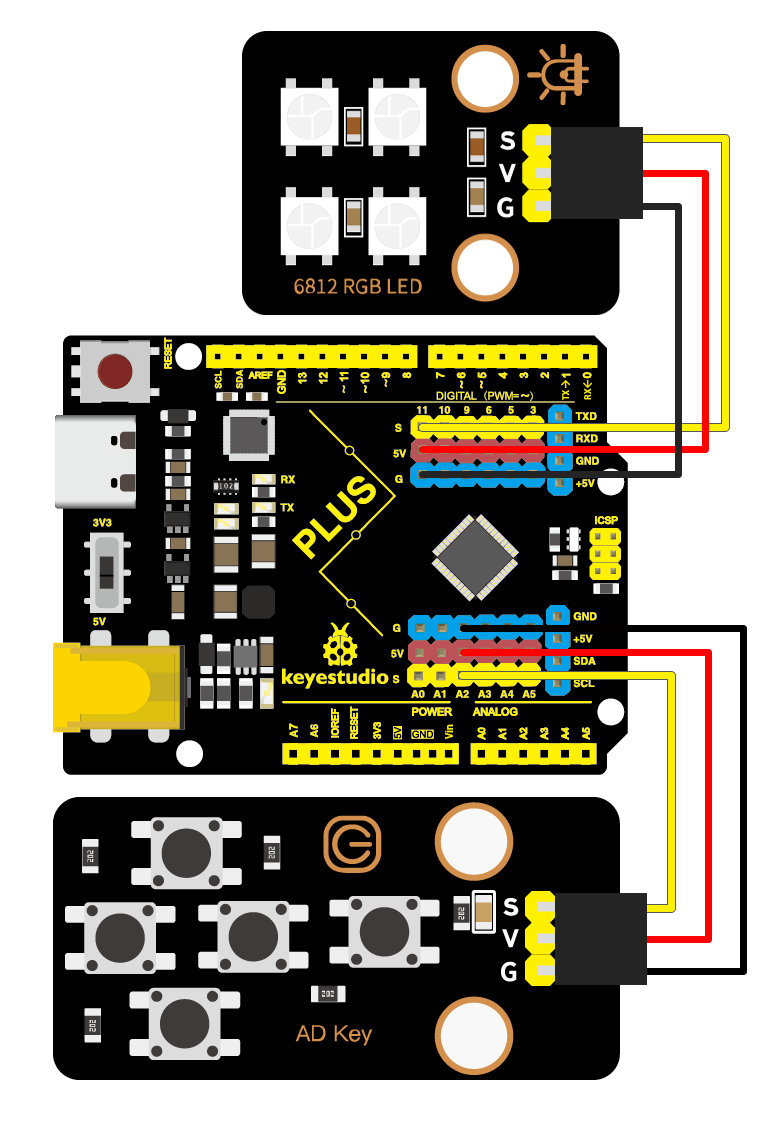
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.2Plant_Light.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Plant_Light
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include <Adafruit_NeoPixel.h>
#define PIN 11 // The pin on the Arduino is connected to the NeoPixels.
#define NUMPIXELS 4 // Popular NeoPixel ring size.
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); // Defining rgb_display functions.
float val = 0;
float last_val = 0;
int press_key_index = 0; // 0-none 5-key5 4-key4 3-key3
int sw3_press_num = 0;
int sw4_press_num = 0;
int sw5_press_num = 0;
int ADkey = A2;
int filter_num = 100; // Sampling ADC data 100 times to determine the key value
void setup() {
rgb_display.begin();
rgb_display.setBrightness(50);
colorWipe(rgb_display.Color( 0, 0, 0), 5); // Initialize LED, turn off
Serial.begin(9600);
}
void loop() {
last_val = val; // Update the last ADC value
val = filter_ADkey(); // Update current ADC value
/*
When the current ADC value is greater than 10 (a key is pressed)
and the absolute value of the difference between the last and
current ADC value is less than 10 (the key is pressed steadily)
*/
if (val>10 && abs(last_val-val)<10)
{
if (100 < val && val <= 300) { // Key 5
press_key_index = 5;
/*
Update the number of times that key 5, 4, and 3 are pressed continuously.
If the same key is pressed again, different keys are cleared.
*/
sw5_press_num++;
sw4_press_num = 0;
sw3_press_num = 0;
if(sw5_press_num%2==1) // key5 is pressed
colorWipe(rgb_display.Color(255, 0, 0), 5); // Red
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
else if (300 < val && val <= 500) { // Key 4
press_key_index = 4;
sw4_press_num++;
sw5_press_num = 0;
sw3_press_num = 0;
if(sw4_press_num%2==1)
colorWipe(rgb_display.Color( 0, 255, 0), 5); // Green
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
else if (500 < val && val <= 700) { // Key 3
press_key_index = 3;
sw3_press_num++;
sw5_press_num = 0;
sw4_press_num = 0;
if(sw3_press_num%2==1)
colorWipe(rgb_display.Color(0, 0, 255), 5); // Blue
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
Serial.println(val);
// Serial.println(press_key_index);
// Serial.println(last_press_key_index);
// Serial.println(led_status);
delay(200);
}
else if(val < 10){
press_key_index = 0;
}
}
void colorWipe(uint32_t color, int wait) {
for(int i = 0; i < rgb_display.numPixels(); i++) { // For each pixel in strip...
rgb_display.setPixelColor(i, color); // Set pixel's color (in RAM)
delay(wait); // Pause for a moment
}
rgb_display.show(); // Update strip to match
}
float filter_ADkey(void) // Define a function that returns a float.
{
int read_val[filter_num]; // Define an integer array with a length of 100 to store the ADC sequence.
int read_max = 0; // Define the maximum value of the ADC sequence
int read_min = 1000; // Define the minimum value of the ADC sequence
float read_return = 0; // Define the sum of ADC sequences
// Read the ADC value 100 times and store them in the sequence.
for(int i = 0;i<filter_num;i++)
{
read_val[i] = analogRead(ADkey);
delayMicroseconds(10);
}
// Find the maximum and minimum values in the ADC sequence and calculate the sum of the ADC values.
for(int i = 0;i<filter_num;i++)
{
if(read_val[i]>read_max)
read_max = read_val[i];
if(read_val[i]<read_min)
read_min = read_val[i];
read_return = read_return + read_val[i];
}
return (read_return-read_min-read_max)/(filter_num-2); // Find the average value of the ADC sequence
}
Code Explanation
Data Type |
Description |
|---|---|
float |
Floating point type (single precision floating point number). |
Arithmetic operator |
Description |
|---|---|
- |
Subtract the second operand from the first operand. |
% |
The complement operator, or modulo operation, is the remainder of an integral division. |
/ |
Division. Numerator is divided by denominator. |
Relational operator |
Description |
|---|---|
<= |
Check whether the value of the left operand is less than or equal to the value of the right operand, |
>= |
Check whether the value of the left operand is greater than or equal to the value of the right operand, |
Logical operator |
Description |
|---|---|
&& |
Logic and operators. If both operands are true, the condition is true. |
Code |
Explanation |
|---|---|
float val = 0; |
Define a variable val of float to hold the current ADC value, and initial value is 0. |
float last_val = 0; |
Define a variable last_val of float to hold the last ADC value, and initial value is 0. |
int press_key_index = 0; |
Define a variable press_key_index of int to hold the label of the currently pressed key, |
int sw3_press_num = 0; |
Define a variable sw3_press_num of int to hold the the number of times the key 3 has been pressed, |
int filter_num = 100; |
Sampling ADC data 100 times to judge key value. |
last_val = val; |
Update the last ADC value. |
val = filter_ADkey(); |
Update the ADC value. |
if (val>10 && abs(last_val-val)<10) |
The key is pressed smoothly. |
sw5_press_num%2==1 |
The value of sw5_press_num is divided by 2 to take the remainder. |
int read_val[filter_num] |
Declare an read_val array of int that contains filter_num elements. |
delayMicroseconds(10); |
delay 10us |
Code Block Explanation
Nested branches
Nesting a branch structure completely within another branch structure is called nested branch. Nested branches are not suitable for multiple condition expressions, usually less than three.
if(condition expression){
if(conditiona expression){ //including single branch, dual branch, or multiple branches.
.....
}else{
......
}
}else{
......
}
Instance analysis(1)
if (100 < val && val <= 300) { // Key 5
press_key_index = 5;
/*
Update the number of times that key 5, 4, and 3 are pressed continuously.
If the same key is pressed again, different keys are cleared.
*/
sw5_press_num++;
sw4_press_num = 0;
sw3_press_num = 0;
if(sw5_press_num%2==1) // key5 is pressed
colorWipe(rgb_display.Color(255, 0, 0), 5); // Red
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
This section uses a nested branch structure. The outer branch determines whether the button has been pressed and updates the pressed times. The inner branch determines whether the pressed times is an odd or even number, and executes the corresponding code based on the result of the judgment.
① if (100 < val && val <= 300)When the value of val is between 100 and 300, the key 5 is pressed, then you need to update the value of press_key_index to 5.
② The initial value of sw5_press_num is 0(led is off),press the sw5_press_num, then the value is 1(led is on),press it again, it will be 2(led is off),that is, when the value of sw5_press_num is even, led is off and on when odd.
Use if(sw5_press_num%2==1)to determine whether the residual value is 1, which means that the number of times pressed at this time is odd.
Update the pressed times of the key before controlling leds:
sw5_press_num++;
sw4_press_num = 0;
sw3_press_num = 0;
The code means to update the times that keys 5, 4 and 3 are pressed. When the key 5 is pressed continuously, the value of sw5_press_num is increased by 1, and sw4_press_num and sw3_press_num are 0.
Zeroing means changing the next value of the other key to 0, so that when the other key is pressed, the corresponding color of the led can be lit smoothly.
Instance analysis(2)
if (100 < val && val <= 300) { // Key 5
... ...
}
else if (300 < val && val <= 500) { // Key 4
... ...
}
else if (500 < val && val <= 700) { // Key 3
... ...
}
This section applies the multiple branch structure to judge which key is pressed.
Instance analysis(3)
int ADkey = A2;
int filter_num = 100; // Sampling ADC data 100 times to determine the key value
float filter_ADkey(void) // Define a function that returns a float.
{
int read_val[filter_num]; // Define an integer array with a length of 100 to store the ADC sequence.
int read_max = 0; // Define the maximum value of the ADC sequence
int read_min = 1000; // Define the minimum value of the ADC sequence
float read_return = 0; // Define the sum of ADC sequences
// Read the ADC value 100 times and store them in the sequence.
for(int i = 0;i<filter_num;i++)
{
read_val[i] = analogRead(ADkey);
delayMicroseconds(10);
}
// Find the maximum and minimum values in the ADC sequence and calculate the sum of the ADC values.
for(int i = 0;i<filter_num;i++)
{
if(read_val[i]>read_max)
read_max = read_val[i];
if(read_val[i]<read_min)
read_min = read_val[i];
read_return = read_return + read_val[i];
}
return (read_return-read_min-read_max)/(filter_num-2); // Find the average value of the ADC sequence
}
Here we define a float function filter_ADkey, and use a for loop every 10us to get analog value read by the A2 port for 100 times, and put them into the array read_val in order. Then use the median average filtering method (a classical filtering algorithm, continuously sampling N data, remove a maximum value and a minimum value, and then calculate the arithmetic average value of N-2 data) principle. Use the for loop to filter out the maximum and minimum values in the array read_val, and remove the maximum and minimum values from the 100 analog values to get the average value.
Details:
int read_val[filter_num];Define an array read_val that can hold 100 numbers of int.
int read_max = 0;Defines a variable read_max* of int as a comparison value for the filter maximum value, the initial value is 0.
int read_min = 1000;Define a variable read_min* of int as a comparison value to the filter minimum, the initial value is 1000.
float read_return = 0;Define a variable read_return of float to store the sum of the read 100 ADC values.
Enter the first for loop to read the analog value read by A2 port for 100 times and put them into the array read_val :
Step1:execute int i = 0
Step2:
① execute i<filter_num
② If its value is true, the embedded statement specified in the for statement is executed: the analog value will be read by the A2 port and place them in the first i bit of the array read_val with a delay of 10us. Then execute step 3.
Step3:execute i++
Step4:execute Step2,if i<filter_num condition is not met, go to Step 5
Step5:loop ends.
Enter the second for loop to filter out the maximum and minimum values:
Step1:executeint i = 0
Step2:
① executei<filter_num
② If its value is true, the embedded statement specified in the for statement is executed:
Step①:Enter if statement to judge whether the first i value in the array read_val is greater than read_max (the initial value is 0). If so, assign the value to read_max. If not, go to step 2. With this if statement, we can find the maximum value in the array.
Step②:Enter if statement to judge whether the first i value in the array read_val is smaller than read_min (the initial value is 1000). If so, assign the value to read_min. If not, go to step 3. With this if statement, we can find the minimum value in the array.
Step③:Add read_return (initial value is 0) to the first i bit of the array read_val and assign it again to read_return. Each time the loop adds a single digit, it is equivalent to the sum of all the values of the array.
Step3:execute i++
Step4:execute Step2,if i<filter_num condition is not met, go to Step 5
Step5:loop ends.
When the maximum and minimum values are filtered through the for loop,execute return (read_return-read_min-read_max)/(filter_num-2);,and remove the maximum and minimum values from the 100 analog values to get the average value,then return to filter_ADkey.
Test Result
After the code is uploaded successfully, all the leds are off. If you want to light up a led you like, just press the corresponding button, press it again will turn off it.
5.3 Environment Monitoring System
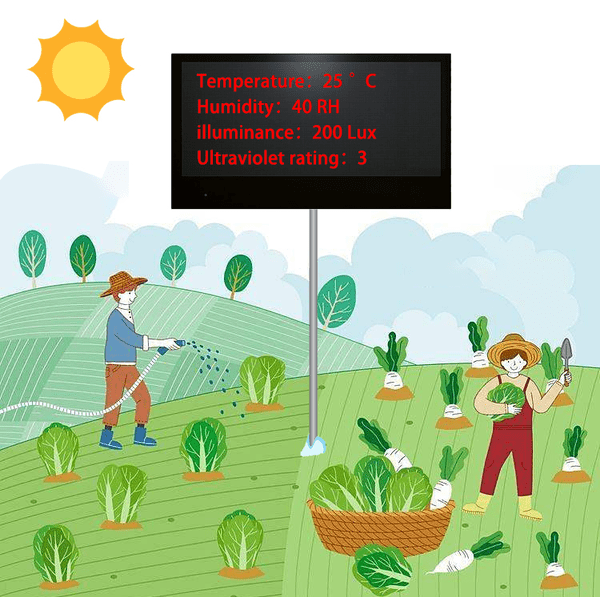
Greenhouse is a frequently used production method in recent modern agriculture, and therefore greenhouse environment monitoring system has been developed. It is mainly used to monitor and manage temperature and humidity, water and fertilizer irrigation, light level, gas concentration as well as supplemental lighting.
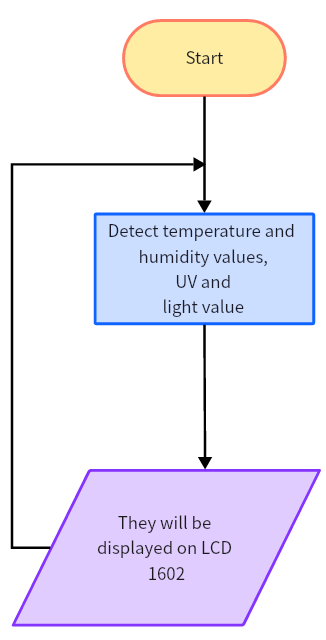
Flow Chart
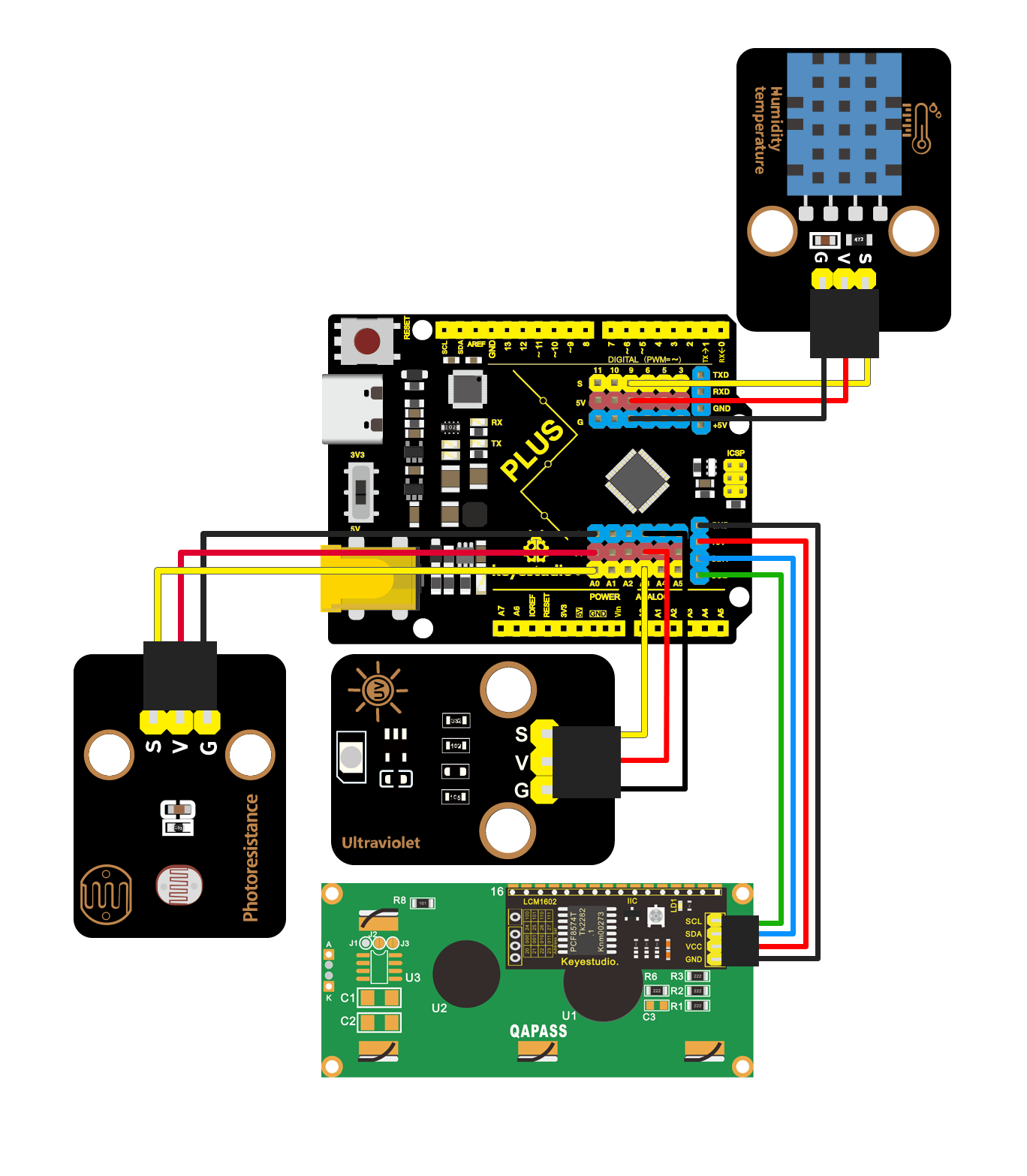
Wiring Diagram
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.3Environmental_monitoring.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Environmental_monitoring
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include<LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
#include "xht11.h"
unsigned char dht[4] = {0, 0, 0, 0}; //Only the first 32 bits of the data are received, not the parity bits.
int val = 0;
int photoPin = A0; //The pin of the Photoresistance
int sensorValue;//Packet output from the sensor
long sum = 0;
int vout = 0; //vout is the processed data, that is, the output voltage of photocurrent of ultraviolet sensor
int uv = 0; //UV Index
xht11 xht(9);
void setup() {
Serial.begin(9600); //Open the serial monitor and set the baud rate to 9600.
pinMode(photoPin, INPUT); //Set input mode
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop() {
val = analogRead(photoPin); //Read the value of the sensor
xht.receive(dht);
sensorValue = 0;
sum = 0;
for(int i = 0 ; i < 1024 ; i++ ) //filter algorithm
{
sensorValue = analogRead(A3); //Connect to pin A3
sum = sensorValue + sum;
delay(2);
}
vout = sum >> 10; //Start data processing
vout = vout * 4980.0 / 1024;
//The resulting photocurrent value is converted into an ultraviolet rating
if(vout < 50){
uv = 0;
}
else if(vout < 227){
uv = 1;
}
else if(vout < 318){
uv = 2;
}
else if(vout < 408){
uv = 3;
}
else if(vout < 503){
uv = 4;
}
else if(vout < 606){
uv = 5;
}
else if(vout < 696){
uv = 6;
}
else if(vout < 795){
uv = 7;
}
else if(vout < 881){
uv = 8;
}
else if(vout < 976){
uv = 9;
}
else if(vout < 1079){
uv = 10;
}
else{
uv = 11;
}
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0,0);
lcd.print("TEMP:");
lcd.setCursor(5,0);
lcd.print(dht[2]);
lcd.setCursor(10,0);
lcd.print("H:");
lcd.setCursor(12,0);
lcd.print(dht[0]);
lcd.setCursor(0,1);
lcd.print("ILL:");
lcd.setCursor(4,1);
lcd.print(val);
lcd.setCursor(10,1);
lcd.print("UV:");
lcd.setCursor(13,1);
lcd.print(uv);
}
Code Explanation
We will read the values of the photosensitive sensor, XHT11 temperature and humidity sensor and solar UV sensor, and set the starting coordinates on the LCD 1602 display, then print them on it and update them in real time.
Test Result
After the code is uploaded successfully, real-time temperature, humidity, light and UV level will be displayed on the LCD 1602 display.
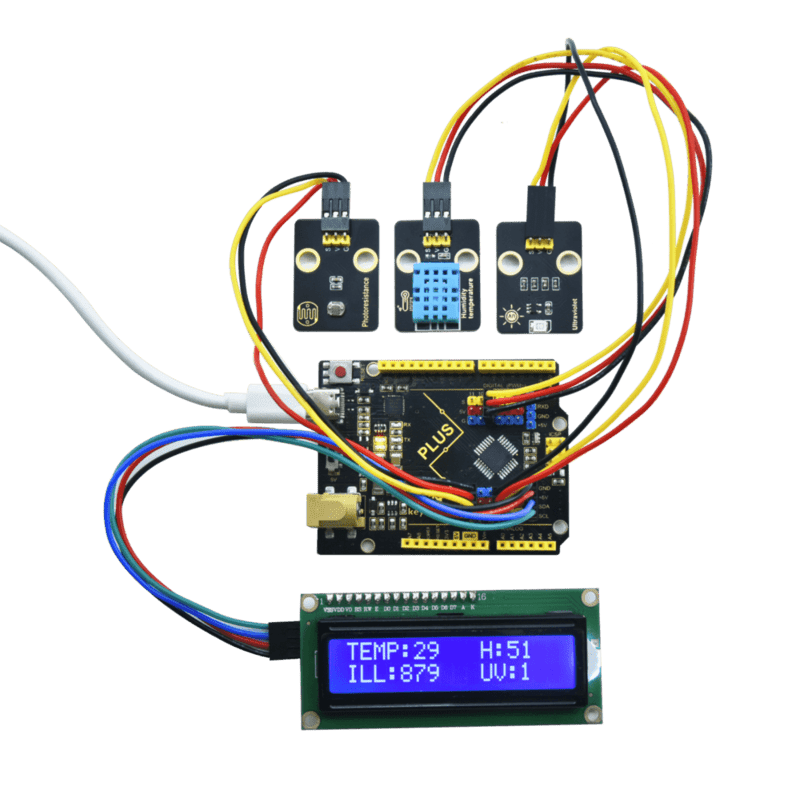
5.4 Application of Solar Energy
Solar panels convert sunlight into electricity, which can be used for multiple applications, such as powering outdoor lighting, charging mobile devices, or even as a backup power source for a home or business. By combining the power of the sun with the flexibility of Arduino, users are capable of creating complex and efficient solar power systems based on their specific needs.
The product welds a solar panel and a motor into a single unit, and utilizes the power converted from the sun to drive the motor.
Note: This solar board needs to be used in a sunny environment, otherwise it will not be able to show the effect.
Parameters
Voltage: 5 V
Current: 80 mA
Power: 400 mW
Operating temperature: -10°C ~ +50°C
Dimensions: 60 x 60 mm
Weight: 2.5g
Principle of converting solar energy into electricity
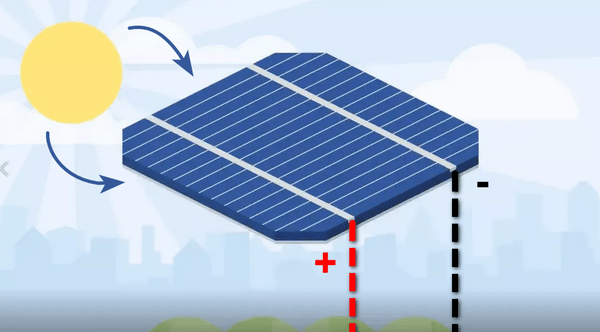
Solar energy can be converted into electricity and is a renewable energy source, which mainly uses the photovoltaic effect and the photothermal effect.
Photovoltaic effect:When light strikes a semiconductor material, it creates electrons and holes to form an electric current.
Photothermal effect:It uses solar energy to generate heat energy, which is then converted into power or electricity.
Convert light energy into electricity
Solar panels absorb sunlight and convert solar energy into electricity through the photovoltaic or photochemical effect.

Solar panels are capable of absorbing light energy from the sun, which is mainly composed of ultraviolet, visible and infrared light.
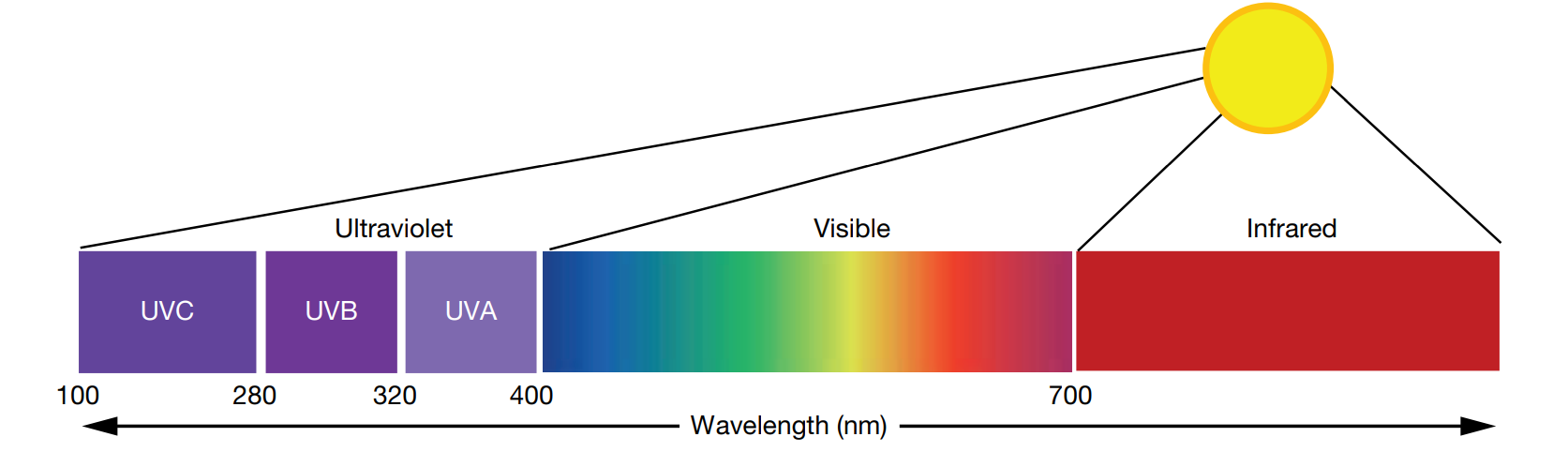
Typically, solar panels are capable of absorbing wavelengths in the range of 350 ~ 1140 nm, the wavelength range covers ultraviolet, visible and part infrared wavelengths.
The range of wavelengths absorbed by a solar panel depends on its material and design. The active part of the solar panel cell is made of a semiconductor material, usually silicon (Si), which effectively absorbs wavelengths in the visible range (the absorption peak of a silicon solar cell sheet is located in the wavelength range of 400 nm to 700 nm, which is the wavelength range of visible light).
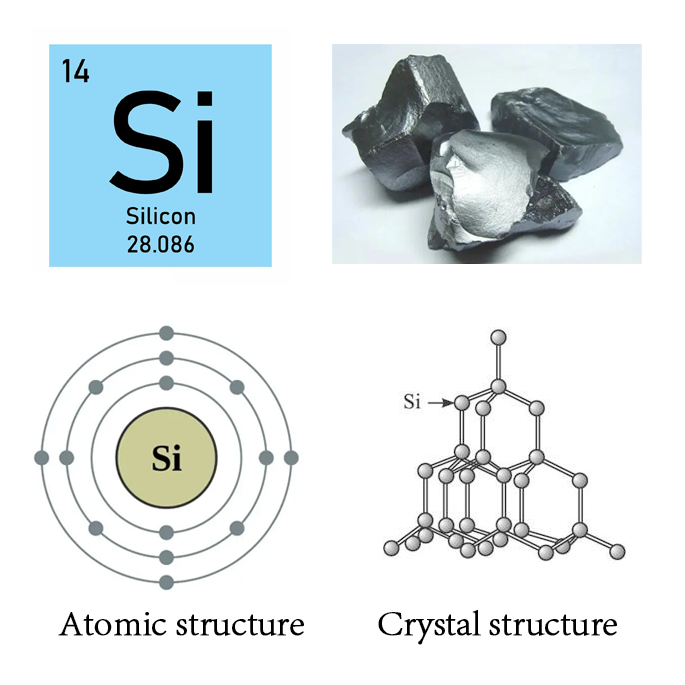
Semiconductor is a material whose electrical conductivity is between a conductor and an insulator at normal temperature and generally does not conduct electricity well.
The semiconductor inside a solar cell is usually divided into three layers, as shown below:
Red part:It contains silicon (Si) and a small amount of phosphorus (P), the phosphorus has more electrons than silicon, providing the top layer with ample electrons and conductivity. Therefore, the top layer is also called negative or n-type.
Gray part:It has poor conductivity.
Green part :It contains silicon (Si) and boron (B), boron carries fewer electrons than silicon, leaving the substrate with fewer electrons that can move freely, and these missing electrons can be described as effective positive charge. Thus, the underlayer is positive or P-type.
The wavelength range of light absorbed by solar panels is usually 350 ~ 1140nm, and only this portion of light (including visible light, the long-wave portion of ultraviolet light, and the short-wave portion of infrared light) can be absorbed by the solar panel’s interlayer.
UV wavelengths are so short that they generally stay on the surface of solar panels.
Infrared wavelengths are too long for solar panels to absorb this portion of light energy, which typically passes through the entire panel or is reflected back.
The light energy absorbed by the solar panel knocks electrons off the silicon atoms, leaving the electrons in a free state and creating an empty electron hole.
This electron hole is positive charge and is also called a “hole”. The free electrons will move to the top and reach the top n-type layer, and the hole will move to the bottom and reach the bottom P-type layer.
As soon as sunlight hits a solar panel, a large number of free electrons and holes are produced, the electrons move to the top layer and the holes move to the bottom layer, an electrode is formed, then the flow of electrons creates an electric current.
Solar panels absorb the sun’s energy and convert the electrons in the top and bottom layers. The top layer (N-type layer) is converted to a negative charge and is the negative pole, and the bottom layer (P-type layer) is converted to a positive charge and is the positive pole, and if the two layers are connected via a wire, the electricity can be energized.
Test Result
When the solar panel is irradiated by sufficient sunlight, the motor drives the fan to rotate.
5.5 Water Level Monitoring
Note: Please use water carefully, do not spill water from the pool and soil cell. If water is spilled on other sensors, it will cause a short circuit when energized, affecting the normal operation of the device, if water is spilled on the battery, it will lead to danger of heat generation and explosion.
Thus,please be careful when using the device. Children must be supervised by their parents when using the kit. To ensure the safe operation of the device, follow the relevant user guides and safety regulations.
Monitoring the water level in a reservoir is important in agricultural automation. It gets real-time information about the water level, reminding us to fill water in time when the level is insufficient and sounding an alarm when the level is too high to prevent overflow.
Flow Chart
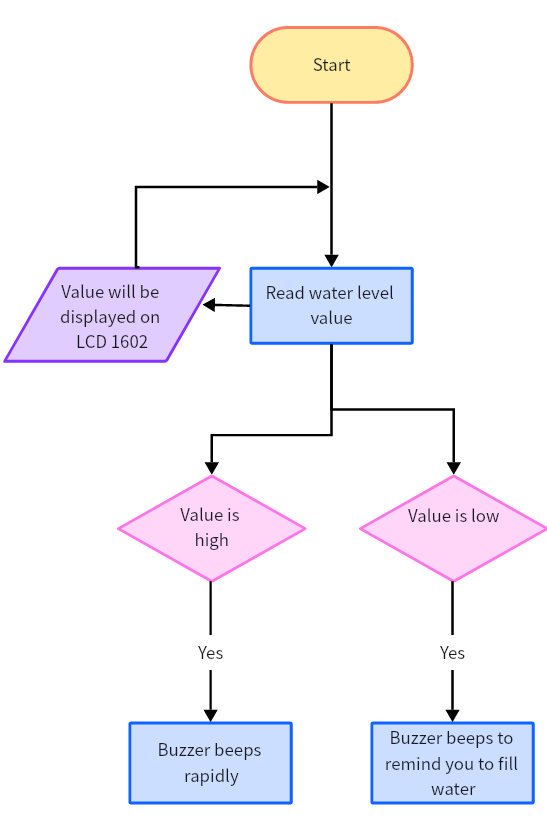
Wiring Diagram
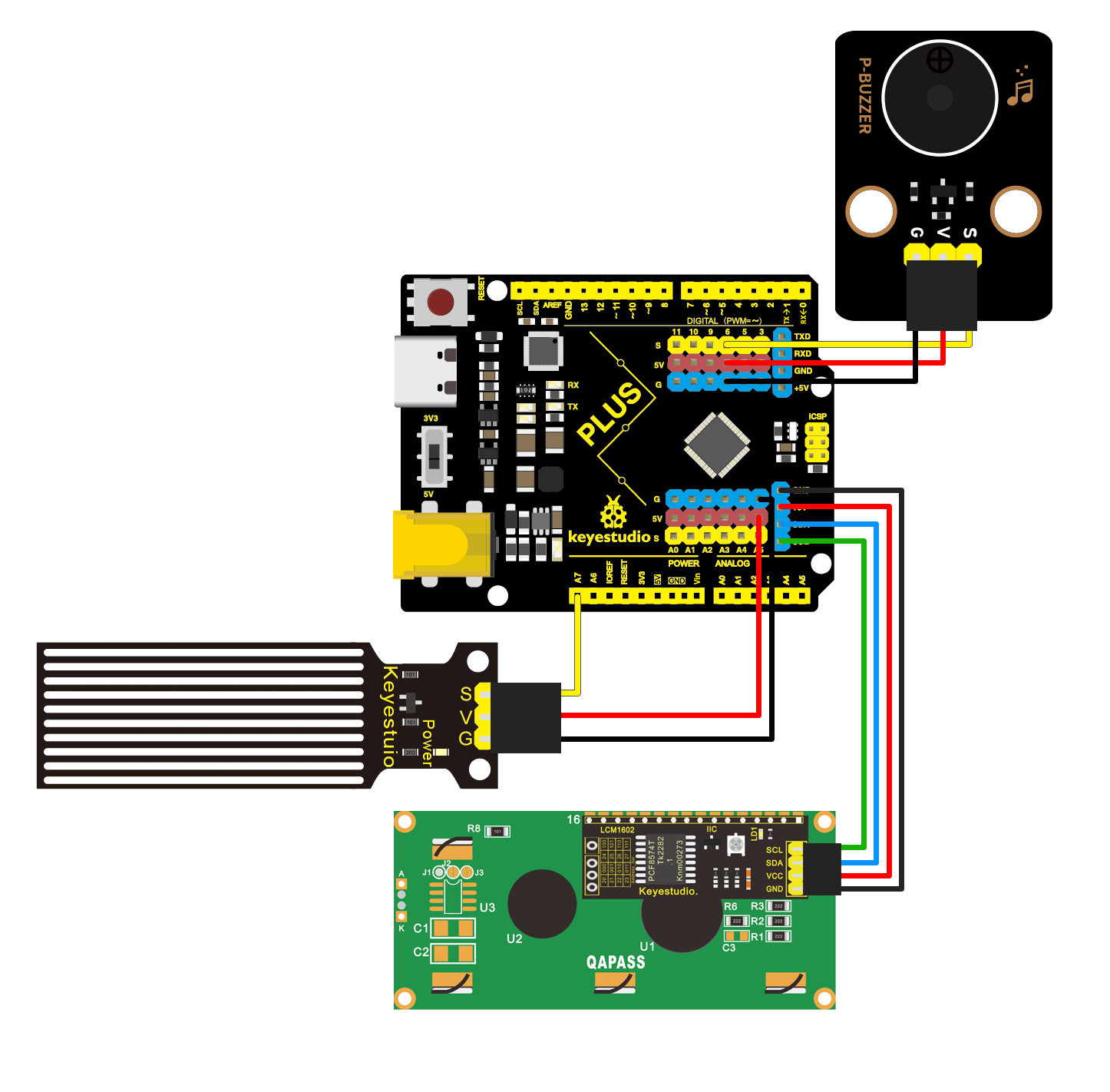
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.5Water_level_monitoring.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Water_level_monitoring
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define WaterLevelPin A7
#define BuzzerPin 6 //Define the buzzer pin
#include<LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
void setup() {
Serial.begin(9600);
pinMode(WaterLevelPin,INPUT);
pinMode(BuzzerPin,OUTPUT);
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop() {
int ReadValue = analogRead(WaterLevelPin);
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0, 0);
lcd.print("WaterLevel:");
lcd.setCursor(6, 1);
lcd.print(ReadValue);
if( ReadValue >= 500 )
{
tone(BuzzerPin,1500);
delay(300);
tone(BuzzerPin,1000);
delay(300);
noTone(BuzzerPin);
}
else if ( ReadValue <= 50 )
{
tone(BuzzerPin,659);
delay(1000);
tone(BuzzerPin,532);
delay(1000);
noTone(BuzzerPin);
}
else
{
noTone(BuzzerPin);
delay(1000);
}
}
Code Explanation
Code |
Explanation |
|---|---|
tone(BuzzerPin,1500); |
tone() is a function used to output a tone signal to a digital pin, which makes the Arduino generate a certain square wave signal according to the specified frequency and duration to drive or control external devices or circuits. |
Read the values of the photosensitive sensor, the XHT11 temperature and humidity sensor and the solar UV sensor, set the starting coordinates on the LCD 1602 display, print them all on it and update them in real time.
Test Result
After the code is successfully uploaded, the LCD1602 display updates the water level value in real time. When the water level value is less than or equal to 50 (this threshold can be adjusted according to the actual situation), a slightly slow beep is issued to remind that it is time to fill water. When the value is greater than or equal to 500, a sharp beep is issued to remind that the water is about to overflow.
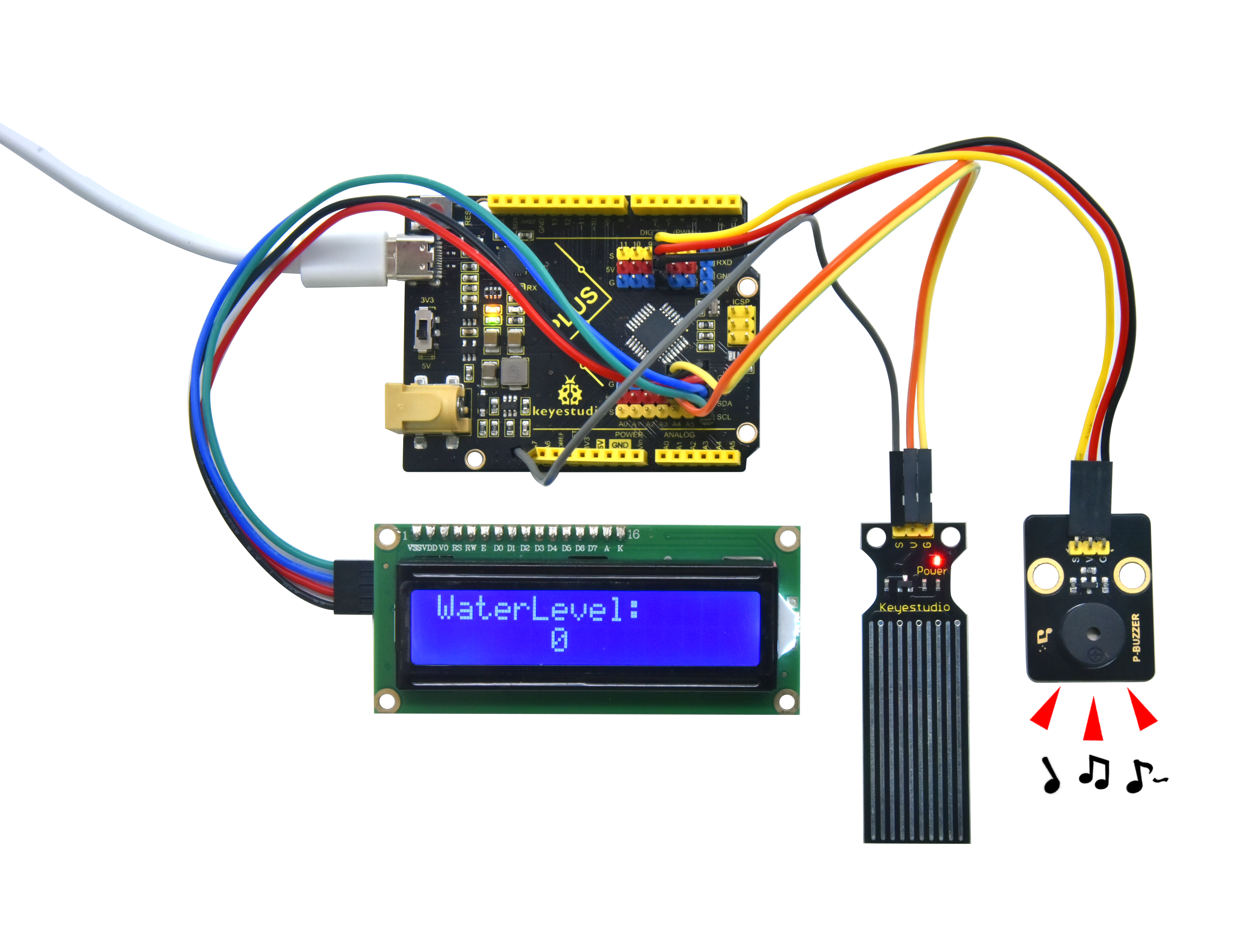
5.6 Soil Moisture Monitoring

The realization of soil moisture monitoring technology is crucial in the realization of automated agriculture, which not only can realize real-time monitoring throughout the day, but can greatly improve the efficiency of agricultural production.
Flow Chart
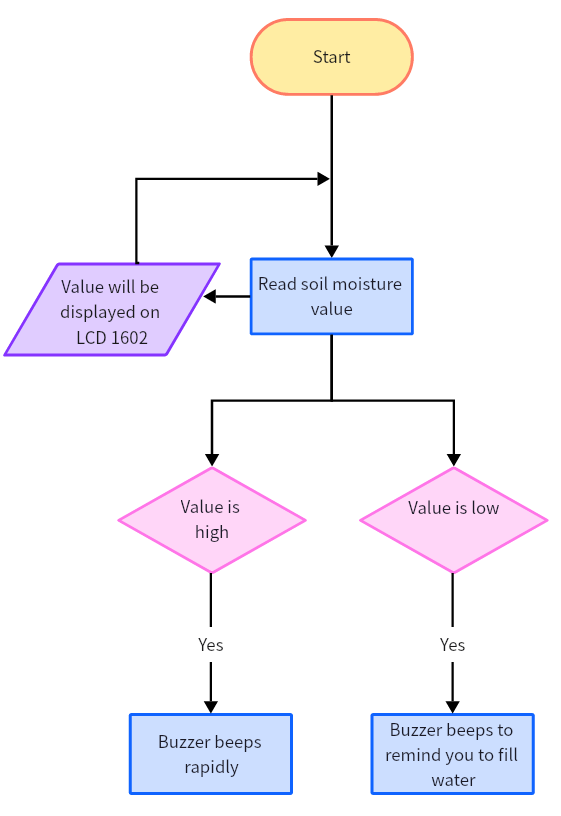
Wiring Diagram
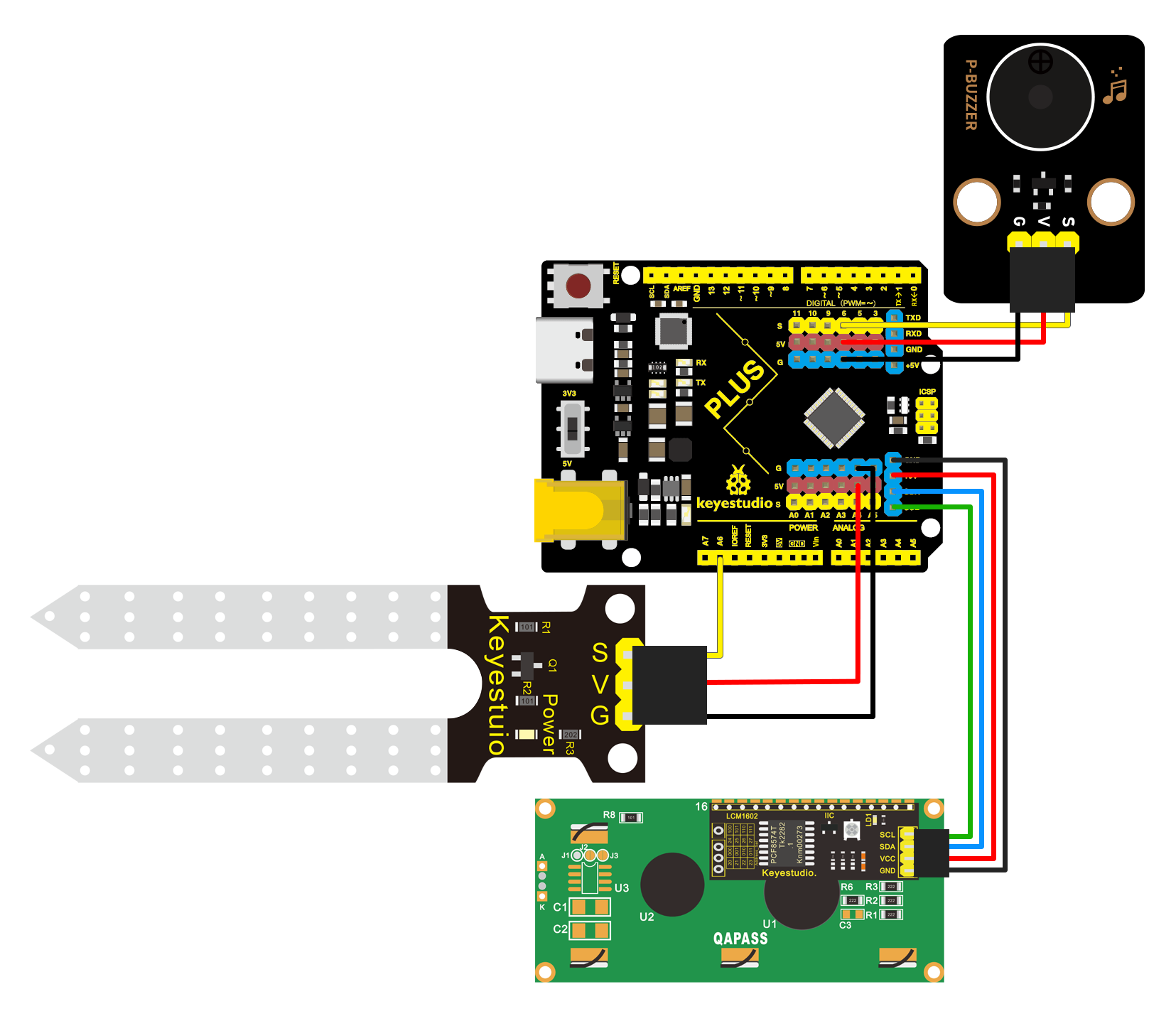
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.6Soil_humidity_monitor.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Soil_humidity_monitor
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define SoilHumidityPin A6
#define BuzzerPin 6 //Define the buzzer pin
#include<LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
void setup() {
Serial.begin(9600);
pinMode(SoilHumidityPin,INPUT);
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop() {
int ReadValue = analogRead(SoilHumidityPin);
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0, 0);
lcd.print("SoilHumidityPin:");
lcd.setCursor(6, 1);
lcd.print(ReadValue);
if( ReadValue >= 200 )
{
tone(BuzzerPin,1500);
delay(300);
tone(BuzzerPin,1000);
delay(300);
noTone(BuzzerPin);
}
else if ( ReadValue <= 20 )
{
tone(BuzzerPin,659);
delay(1000);
tone(BuzzerPin,532);
delay(1000);
noTone(BuzzerPin);
}
else
{
noTone(BuzzerPin);
delay(1000);
}
}
Test Result
After the code is successfully uploaded, the LCD1602 display updates the soil moisture value in real time. When the humidity value is less than or equal to 20 (this threshold can be adjusted according to the actual situation), a slightly slow beep is issued to remind that it is time to fill water. When the value is greater than or equal to 200 (this threshold can be adjusted according to the actual situation), a sharp beep is issued to remind that the soil is too wet and it may drown the plant.
5.7 Irrigation System
Before learning, please place the water pipe.

Note: Please use water carefully, do not spill water from the pool and soil cell. If water is spilled on other sensors, it will cause a short circuit when energized, affecting the normal operation of the device, if water is spilled on the battery, it will lead to danger of heat generation and explosion.
Thus,please be careful when using the device. Children must be supervised by their parents when using the kit. To ensure the safe operation of the device, follow the relevant user guides and safety regulations.

In farmland management, rational irrigation is an important measure to ensure crop growth. Reasonable irrigation means to scientifically control the amount of irrigation and irrigation times according to the water demand law of crops and soil water content in the process of crop growth, so as to ensure crop growth and save water.
It is able to regulate the soil temperature, creating a suitable growing environment for crops. In addition, it empowers to improve soil aeration and promote the dissolution and release of nutrients in the soil. Now, let’s design a simple irrigation system!
Flow Chart
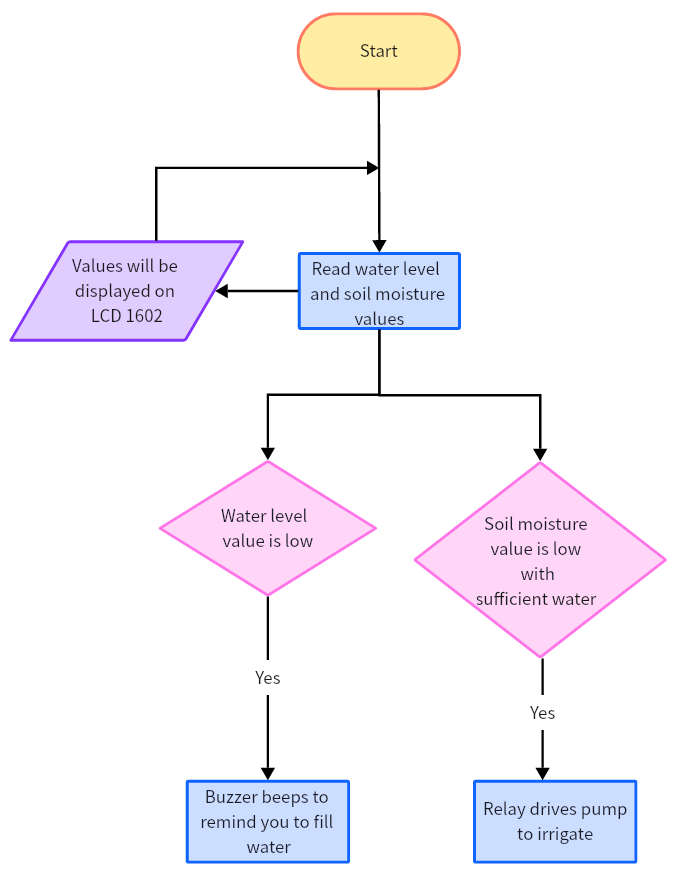
Wiring Diagram
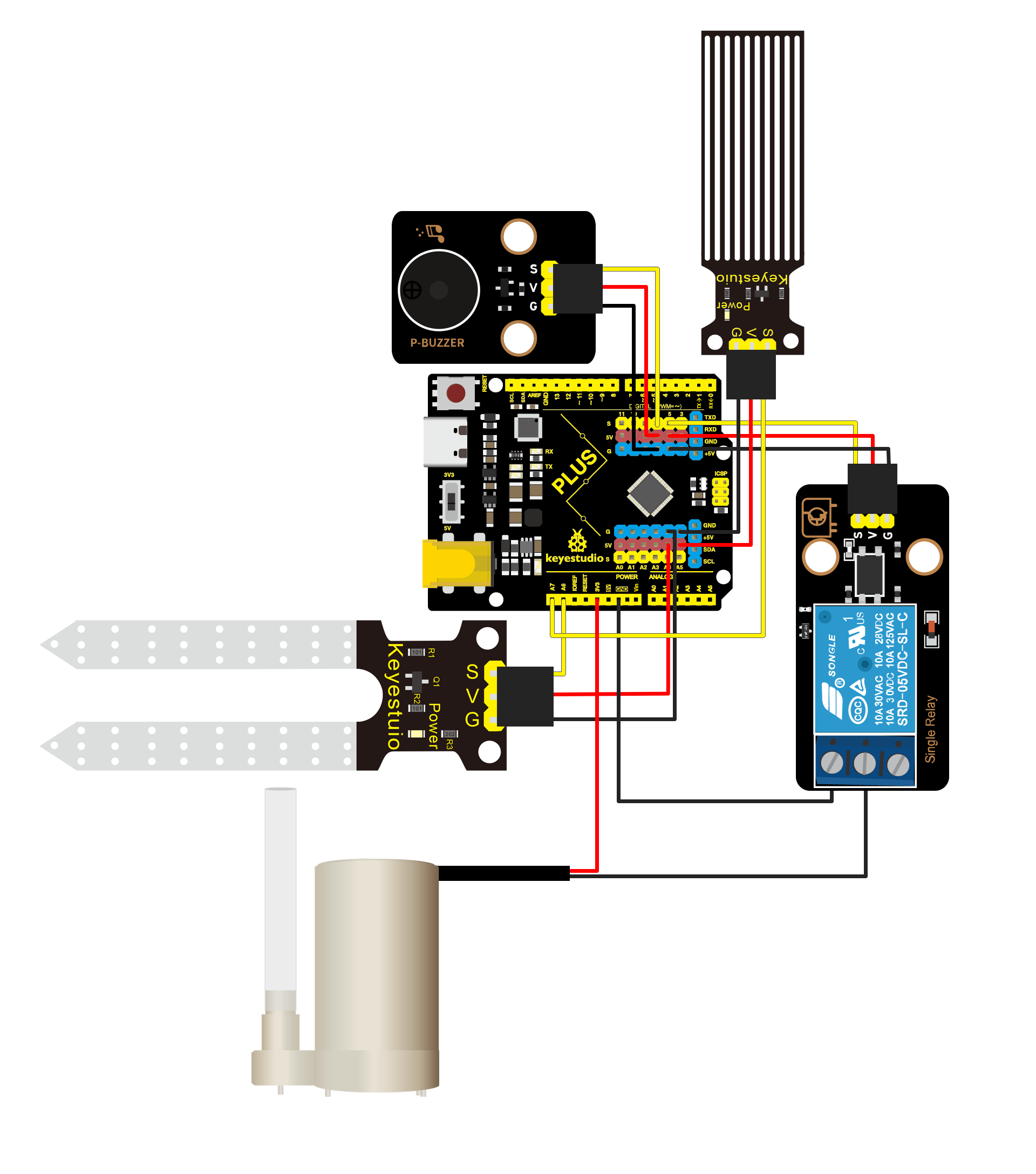
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.7Irrigation_system.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Irrigation_system
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include<LiquidCrystal_I2C.h>
#define RelayPin 5
#define BuzzerPin 6 //Define the buzzer pin
#define SoilHumidityPin A6
#define WaterLevelPin A7
LiquidCrystal_I2C lcd(0x27,16,2);
void setup() {
Serial.begin(9600);
pinMode(RelayPin,OUTPUT);
pinMode(BuzzerPin,OUTPUT);
pinMode(SoilHumidityPin,INPUT);
pinMode(WaterLevelPin,INPUT);
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop() {
int Svalue = analogRead(SoilHumidityPin);
int Wvalue = analogRead(WaterLevelPin);
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0, 0); //Display soil moisture values
lcd.print("SoilHum:");
lcd.setCursor(9, 0);
lcd.print(Svalue);
lcd.setCursor(0, 1);
lcd.print("WaterLevel:"); //Display water level value
lcd.setCursor(11, 1);
lcd.print(Wvalue);
if(Wvalue <= 50)
{
tone(BuzzerPin,532);
delay(100);
tone(BuzzerPin,659);
delay(100);
noTone(BuzzerPin);
}
else if(Svalue <= 100 && Wvalue >= 500)
{
digitalWrite(RelayPin,HIGH);
delay(400);
digitalWrite(RelayPin,LOW);
delay(700);
}
delay(500);
}
Code Explanation
Please refer to the previous project code.
Test Result
After the code is uploaded successfully, when the pool water level value is lower than 50 (threshold can be modified according to the actual situation), the buzzer sounds an alarm to remind that water needs to be filled. And when the soil humidity value is lower than 100 and the pool water level value is higher than 500 (pool water is sufficient), the relay drives the pump to draw water for irrigation until the soil humidity value is higher than 100.
5.8 Water Wheel System
Before learning, please place the water pipe. The water pipe mouth should be perpendicular to the water wheel board as far as possible.
Note: Please use water carefully, do not spill water from the pool and soil cell. If water is spilled on other sensors, it will cause a short circuit when energized, affecting the normal operation of the device, if water is spilled on the battery, it will lead to danger of heat generation and explosion.
Thus,please be careful when using the device. Children must be supervised by their parents when using the kit. To ensure the safe operation of the device, follow the relevant user guides and safety regulations.
Ancient Chinese laborers used the principles of water power, lever and cam to process grain, and the machine that removes the hulls of grain with water power is called water powered trip hammer.
About Water Powered Trip Hammer
Water powered trip hammer can be set up along the banks of streams and rivers, and multiple water powered trip hammers can be set up depending on the size of the water. With it, grain can be processed day and night.
On the shelf next to the water wheel are four pestles for pounding grain.
The impact of the water causes the water wheel to rotate, which make the horizontal shaft and the short crosspiece to rotate, then the short crosspiece touches the end of pestle, and presses it down, and the front end of the pestle is cocked up. When the short crosspiece turns over the end of the pestle, the upturned end falls down.
The short crosspiece will continuously hit the corresponding mortar and pestle, pounding the rice to remove the hulls so as to make it into white rice.
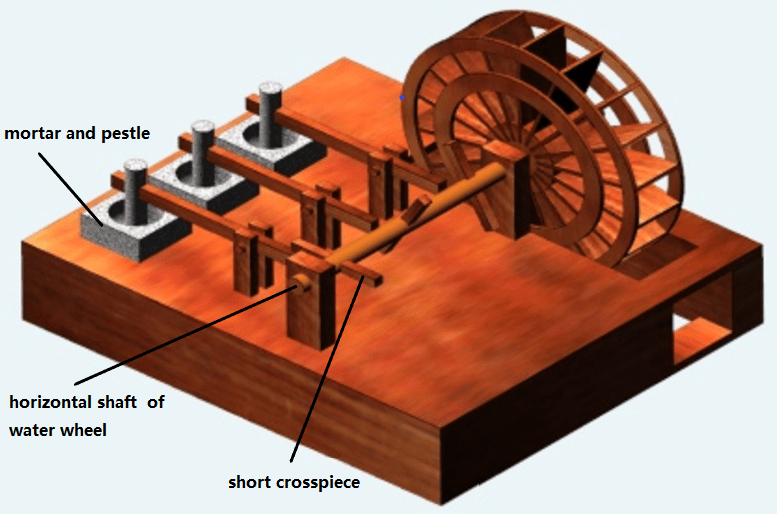
In this project, we use a relay to drive water pump to draw water and impact water wheel, simulating the water wheel being hit by the current on the bank of a stream or river. The water wheel turns, driving the short crosspiece and the pestle and mortar to pound rice.
Siphonage
Siphonage is a phenomenon that utilizes the force of difference in liquid surface heights. After the liquid is filled with an inverted U-shaped tube, and placing the high end of the opening in a liquid-filled container, the liquid in the container will continue to flow out through the siphon tube to a lower position. The siphonage appears through the liquid and the atmospheric pressure.
With only one tube, the two pools will be connected and the water from the water wheel pool flows back to the reservoir automatically.
Step1, fill water to the pool. Fill two-thirds of the water to the reservoir, and a little water to the pool of the water wheel, just a little bit past the bottom.
Step2: Fill the tube with water. (You can either place it in a container filled with water or turn on the faucet and place the it underneath it to catch the water.)

Step3: Block one end of the tube with your finger when it fills with water.

After plugging one end and taking out the tube, you can see that the tube will not leak.

Step4: Place the unplugged side of the tube into the reservoir with the mouth of the tube below the surface of the water. Note that the plugged end of the tube should not be loosened.
Step5: Place the plugged side of the tube into the pool of the water wheel. Take care that the mouth of the tube sits below the surface of the water and then release your fingers.
Complete
Water in the water wheel pool returns to the reservoir.
Flow Chart
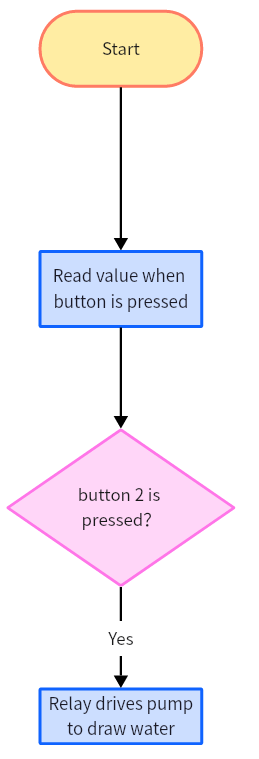
Wiring Diagram
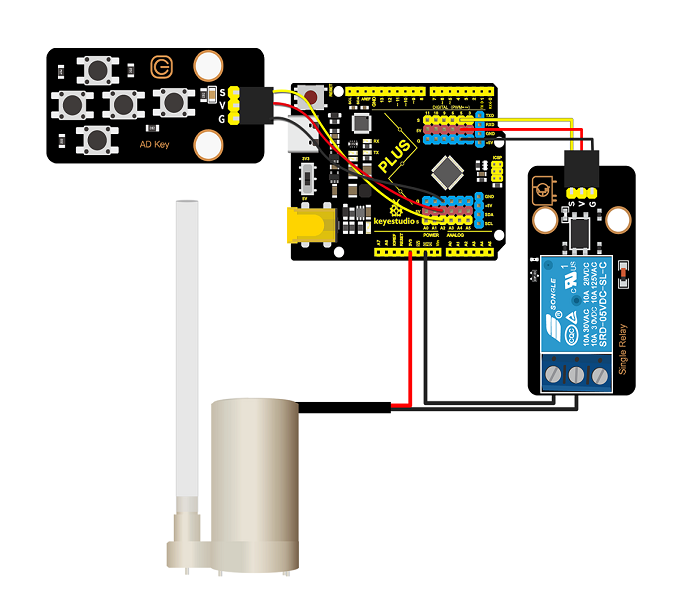
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.8Driving_water_wheel.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Driving_water_wheel
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#define RelayPin 5
int ADkey = A2; //Define ADkey pins
int val = 0;
void setup() {
Serial.begin(9600);
pinMode(RelayPin,OUTPUT);
pinMode(ADkey,INPUT);
}
void loop() {
val = analogRead(ADkey);
if(700 <val && val <= 900)
{
digitalWrite(RelayPin,HIGH);
delay(500);
}
else
{
digitalWrite(RelayPin,LOW);
delay(500);
}
}
Code Explanation
This project utilizes the dual branch structure of the if statement, the relay is energized when SW2 is pressed, otherwise it is disconnected.
Test Result
Assemble the water pipe of the water pump, after the code is uploaded successfully, press the key SW2, the relay is energized to drive the water pump to draw water. At this time, the water impacts the water wheel to rotate.
The water wheel will rotate to make the pestle and mortar work, so as to simulate pounding the rice to remove the shell.
5.9 Integrated Project
In this project, we will combine the previous projects to make an integrated project. Press a button, then the corresponding experiment will be executed.
Flow Chart
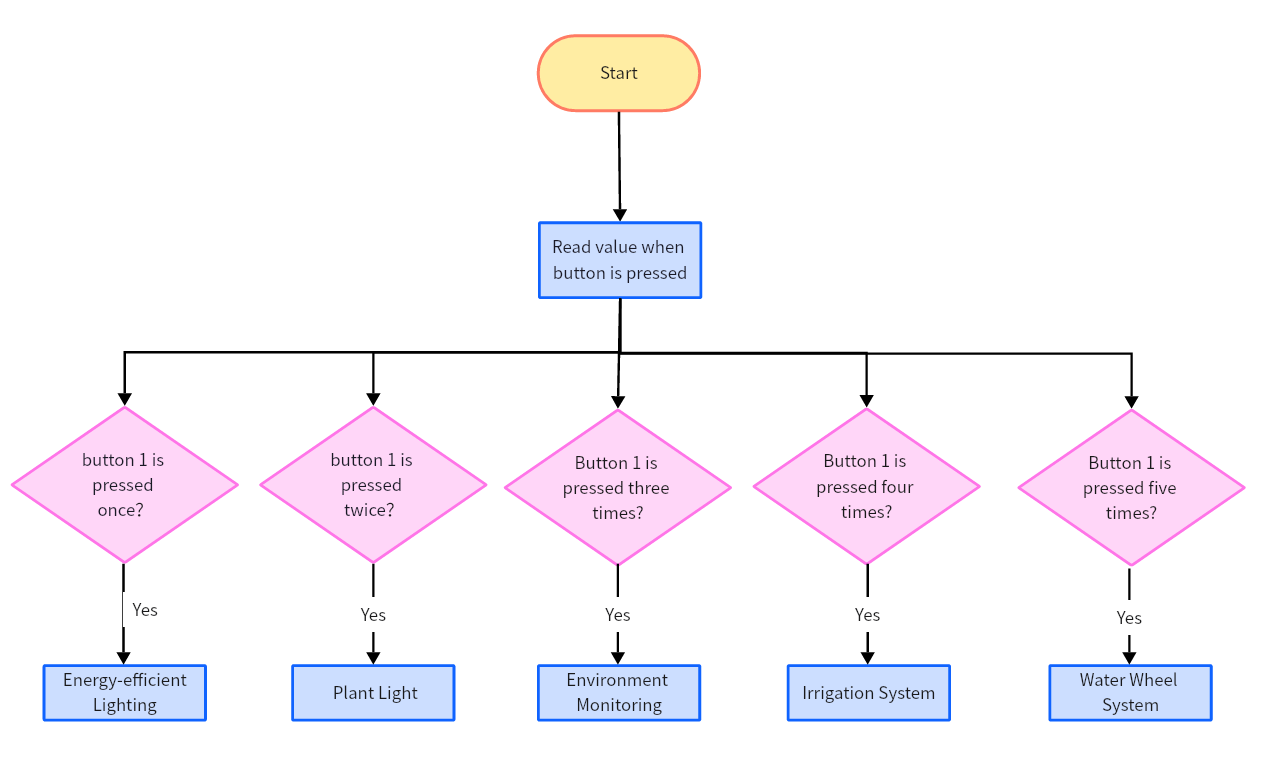
Wiring Diagram
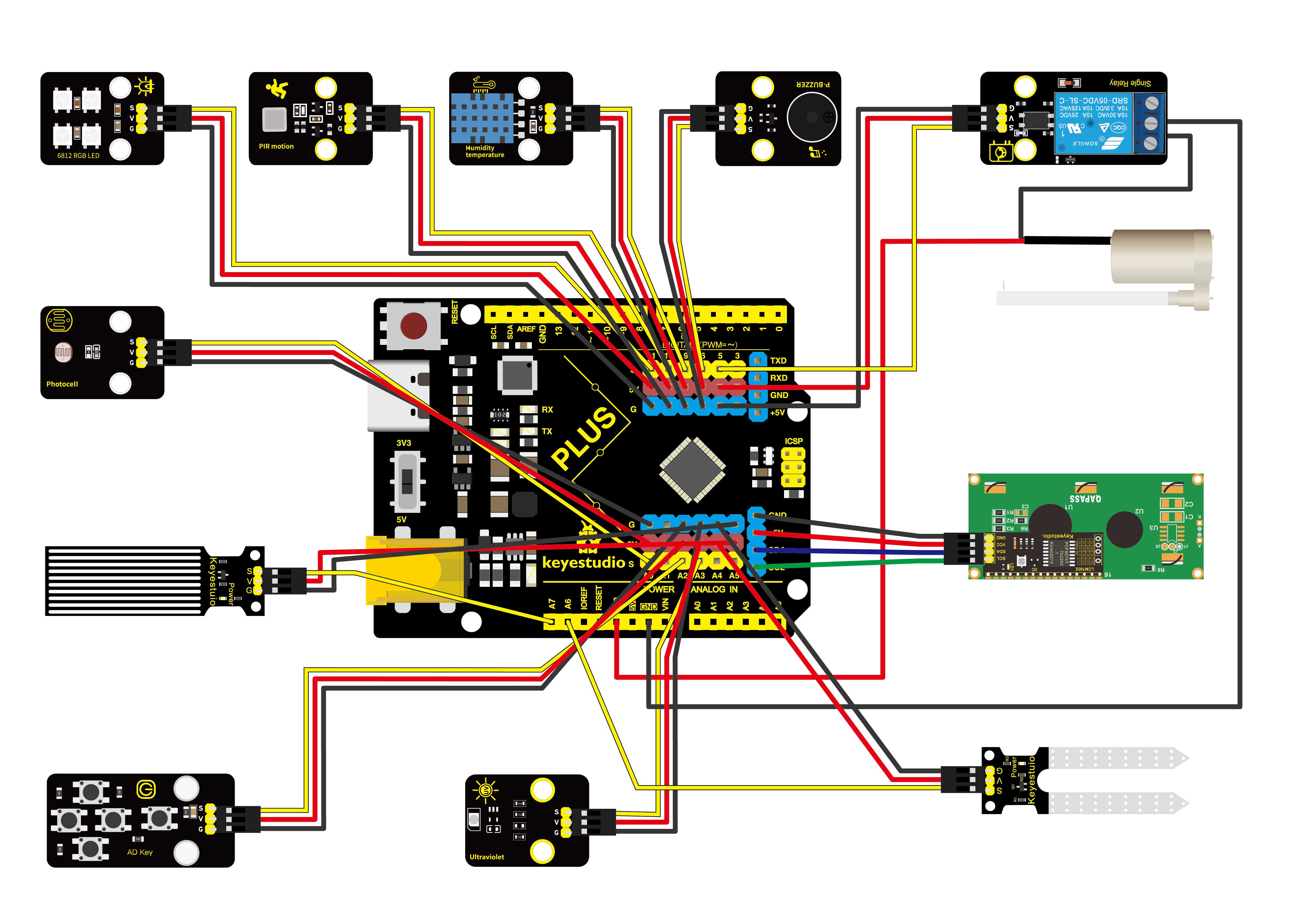
Test Code
In this tutorial, we use Arduino IDE version 2.1.1.
The code file 5.9Comprehensive_experiment.ino can be downloaded in the directory Download Code, please download it by yourself.
/*
* Filename : Comprehensive_experiment
* Arduino IDE : Arduino IDE 2.1.1
* Auther : http//www.keyestudio.com
*/
#include <Adafruit_NeoPixel.h>
#define PIN 11 // Pins on the Arduino that connect to the NeoPixels.
#define NUMPIXELS 4 // Popular NeoPixel ring size.
Adafruit_NeoPixel rgb_display(NUMPIXELS,PIN,NEO_GRB + NEO_KHZ800); // Defining rgb_display functions.
#include "xht11.h"
xht11 xht(9);
#include<LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
int PIRPin = 10; //The pin of the PIR motion
int PhotoPin = A0; //The pin of the Photoresistance
int ADkey = A2; //Define ADkey pins
int SoilHumidityPin = A6;
int WaterLevelPin = A7;
int RelayPin = 5;
int BuzzerPin = 6;
int UVPin = A3;
int PIRvalue = 0; //PIR motion
int Photovalue = 0; //Photoresistance
int ADvalue = 0;
unsigned char dht[4] = {0, 0, 0, 0}; //Only the first 32 bits of the data are received, not the parity bits.
long sum = 0;
int vout = 0; //vout is the processed data, that is, the output voltage of photocurrent of ultraviolet sensor
int uv = 0; //UV Index
int sensorValue = 0;
int PushCounter = 0; //Stores the number of times a key is pressed
float val = 0;
float last_val = 0;
int press_key_index = 0; // 0-none 5-key5 4-key4 3-key3 1-key1
int sw1_press_num = 0;
int sw3_press_num = 0;
int sw4_press_num = 0;
int sw5_press_num = 0;
int filter_num = 100; // Sampling ADC data 100 times to determine the key value
int residue = 0;
bool residue0_led_status = false; // Mission 0 led flag bit
bool residue0_led_status_last = false; // Mission 0 Last led flag bit
void key(){
last_val = val; // Update the last ADC value
val = filter_ADkey(); // Update current ADC value
if (val>10 && abs(last_val-val)<10)
{
if (900 < val) {
press_key_index = 1;
sw1_press_num++;
sw5_press_num = 0;
sw4_press_num = 0;
sw3_press_num = 0;
}
}
residue = sw1_press_num % 5;
Serial.print(" Task");
Serial.println(residue);
}
void setup() {
Serial.begin(9600); //Set baud rate
rgb_display.begin(); //Start 6812RGB
rgb_display.setBrightness(100); //Set the brightness to 5. The value ranges from 0 to 255
colorWipe(rgb_display.Color( 0, 0, 0), 5); // Initialize LED, turn off
pinMode(PIRPin, INPUT); //Set input mode
pinMode(PhotoPin, INPUT); //Set input mode
pinMode(SoilHumidityPin,INPUT);
pinMode(WaterLevelPin,INPUT);
pinMode(RelayPin,OUTPUT);
pinMode(BuzzerPin,OUTPUT);
lcd.init();
lcd.backlight();
lcd.clear();
}
void loop() {
key();
if(residue == 0)
{
residue0();
}
else if(residue == 1)
{
residue1();
}
else if(residue == 2)
{
residue2();
}
else if(residue == 3)
{
residue3();
}
else if(residue == 4)
{
residue4();
}
}
void residue0() {
lcd.setCursor(4,0);
lcd.print("Task 0");
Photovalue = analogRead(PhotoPin);
PIRvalue = digitalRead(PIRPin);
Serial.print(Photovalue);
Serial.print(" ");
Serial.print(PIRvalue);
delay(100);
residue0_led_status_last = residue0_led_status; // Mission 0 led flag bit
if(PIRvalue == 1 && Photovalue <= 200)
{
residue0_led_status = true; // Mission 0 led flag bit
}
else{
residue0_led_status = false; // Mission 0 led flag bit
}
if(residue0_led_status_last != residue0_led_status)
{
if(residue0_led_status){
colorWipe(rgb_display.Color(255, 255, 255), 50); // On
Serial.println(" Led on");
}
else{
colorWipe(rgb_display.Color( 0, 0, 0), 50); // Off
Serial.println(" Led off");
}
delay(100);
}
}
void residue1() {
lcd.setCursor(4,0);
lcd.print("Task 1");
last_val = val; // Update the last ADC value
val = filter_ADkey(); // Update current ADC value
/*
When the current ADC value is greater than 10 (a key is pressed)
and the absolute value of the difference between the last and
current ADC value is less than 10 (the key is pressed steadily)
*/
if (val>10 && abs(last_val-val)<10)
{
if (100 < val && val <= 300) { // Key 5
press_key_index = 5;
/*
Update the number of times that key 5, 4, and 3 are pressed continuously.
If the same key is pressed again, different keys are cleared.
*/
sw5_press_num++;
sw4_press_num = 0;
sw3_press_num = 0;
if(sw5_press_num%2==1) // key5 is pressed
colorWipe(rgb_display.Color(255, 0, 0), 5); // Red
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
else if (300 < val && val <= 500) { // Key 4
press_key_index = 4;
sw4_press_num++;
sw5_press_num = 0;
sw3_press_num = 0;
if(sw4_press_num%2==1)
colorWipe(rgb_display.Color( 0, 255, 0), 5); // Green
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
else if (500 < val && val <= 700) { // Key 3
press_key_index = 3;
sw3_press_num++;
sw5_press_num = 0;
sw4_press_num = 0;
if(sw3_press_num%2==1)
colorWipe(rgb_display.Color(0, 0, 255), 5); // Blue
else
colorWipe(rgb_display.Color(0, 0, 0), 5);
}
Serial.println(val);
// Serial.println(press_key_index);
// Serial.println(last_press_key_index);
// Serial.println(led_status);
delay(200);
}
else if(val < 10){
press_key_index = 0;
}
}
void residue2() {
Photovalue = analogRead(PhotoPin); //Read the value of the sensor
xht.receive(dht);
delay(100);
// sensorValue = 0;
// sum = 0;
for(int i = 0 ; i < 16 ; i++ ) //filter algorithm
{
sensorValue = analogRead(UVPin); //Connect to pin A3
sum = sensorValue + sum;
delay(1);
}
vout = sum >> 4; //Start data processing
vout = vout * 4980.0 / 16;
//The resulting photocurrent value is converted into an ultraviolet rating
if(vout < 50){
uv = 0;
}
else if(vout < 227){
uv = 1;
}
else if(vout < 318){
uv = 2;
}
else if(vout < 408){
uv = 3;
}
else if(vout < 503){
uv = 4;
}
else if(vout < 606){
uv = 5;
}
else if(vout < 696){
uv = 6;
}
else if(vout < 795){
uv = 7;
}
else if(vout < 881){
uv = 8;
}
else if(vout < 976){
uv = 9;
}
else if(vout < 1079){
uv = 10;
}
else{
uv = 11;
}
Serial.print(" ");
Serial.print(vout);
Serial.print(" ");
Serial.print(uv);
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0,0);
lcd.print("TEMP:");
lcd.setCursor(5,0);
lcd.print(dht[2]);
lcd.setCursor(10,0);
lcd.print("H:");
lcd.setCursor(12,0);
lcd.print(dht[0]);
lcd.setCursor(0,1);
lcd.print("ILL:");
lcd.setCursor(4,1);
lcd.print(Photovalue);
lcd.setCursor(10,1);
lcd.print("UV:");
lcd.setCursor(13,1);
lcd.print(uv);
delay(100);
}
void residue3() {
int Svalue = analogRead(SoilHumidityPin);
int Wvalue = analogRead(WaterLevelPin);
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(0, 0); //Display soil moisture values
lcd.print("SoilHum:");
lcd.setCursor(8, 0);
lcd.print(Svalue);
lcd.setCursor(0, 1);
lcd.print("WaterLevel:"); //Display water level value
lcd.setCursor(11, 1);
lcd.print(Wvalue);
delay(100);
if(Wvalue <= 50)
{
tone(BuzzerPin,532);
delay(100);
// tone(BuzzerPin,659);
// delay(100);
noTone(BuzzerPin);
}
else if(Svalue <= 100 && Wvalue >= 500)
{
digitalWrite(RelayPin,HIGH);
delay(500);
digitalWrite(RelayPin,LOW);
delay(500);
}
}
void residue4() {
lcd.clear(); //Clear
lcd.display();
lcd.setCursor(4,0);
lcd.print("Task 4");
val = analogRead(ADkey);
if(700 <val && val <= 900)
{
digitalWrite(RelayPin,HIGH);
}
else
{
digitalWrite(RelayPin,LOW);
}
}
void colorWipe(uint32_t color, int wait) {
for(int i = 0; i < rgb_display.numPixels(); i++) { // For each pixel in strip...
rgb_display.setPixelColor(i, color); // Set pixel's color (in RAM)
rgb_display.show(); // Update strip to match
delay(wait); // Pause for a moment
}
}
float filter_ADkey(void) // Define a function that returns a float.
{
int read_val[filter_num]; // Define an integer array with a length of 100 to store the ADC sequence.
int read_max = 0; // Define the maximum value of the ADC sequence
int read_min = 1000; // Define the minimum value of the ADC sequence
float read_return = 0; // Define the sum of ADC sequences
// Read the ADC value 100 times and store them in the sequence.
for(int i = 0;i<filter_num;i++)
{
read_val[i] = analogRead(ADkey);
delayMicroseconds(10);
}
// Find the maximum and minimum values in the ADC sequence and calculate the sum of the ADC values.
for(int i = 0;i<filter_num;i++)
{
if(read_val[i]>read_max)
read_max = read_val[i];
if(read_val[i]<read_min)
read_min = read_val[i];
read_return = read_return + read_val[i];
}
return (read_return-read_min-read_max)/(filter_num-2); // Find the average value of the ADC sequence
}
Code Explanation
Record the pressed times of key SW1, and divide it by 5 to get the remainder, then the range of the remainder is 0 ~ 4. Then define five functions, which are five experiments. Loop execution: if the remainder is 0, perform the first experiment; the remainder is 1, perform the second experiment … the remainder is 4, perform the the fifth experiment.
Code Block Explanation
void key(){
last_val = val; // Update the last ADC value
val = filter_ADkey(); // Update current ADC value
if (val>10 && abs(last_val-val)<10)
{
if (900 < val) {
press_key_index = 1;
sw1_press_num++;
sw5_press_num = 0;
sw4_press_num = 0;
sw3_press_num = 0;
}
}
residue = sw1_press_num % 5;
Serial.print("Task");
Serial.println(residue);
}
Define the function void key() to record the number of times the key SW1 is pressed, and divide it by 5 to get the remainder, and print the value to the serial monitor.
void residue0() {
Photovalue = analogRead(PhotoPin);
PIRvalue = digitalRead(PIRPin);
Serial.print(Photovalue);
Serial.print(" ");
Serial.print(PIRvalue);
delay(100);
residue0_led_status_last = residue0_led_status; // Mission 0 led flag bit
if(PIRvalue == 1 && Photovalue <= 200)
{
residue0_led_status = true; // Mission 0 led flag bit
}
else{
residue0_led_status = false; // Mission 0 led flag bit
}
if(residue0_led_status_last != residue0_led_status)
{
if(residue0_led_status){
colorWipe(rgb_display.Color(255, 255, 255), 50); // On
Serial.println(" Led on");
}
else{
colorWipe(rgb_display.Color( 0, 0, 0), 50); // Off
Serial.println(" Led off");
}
delay(100);
}
}
Define the function residue0() to hold the code for the first experiment. Define functions residue1(), residue2(), residue3() and residue4() to hold the other experiments.
void loop() {
key();
if(residue == 0)
{
residue0();
}
else if(residue == 1)
{
residue1();
}
else if(residue == 2)
{
residue2();
}
else if(residue == 3)
{
residue3();
}
else if(residue == 4)
{
residue4();
}
}
Loop execution: read the number of times the key is pressed and divide it by 5 to get the remainder. If the remainder is 0, run the function residue0(), that is, execute the first experiment, if the remainder is 1, execute the second experiment … , if the remainder is 4, perform the fifth experiment.
Test Result
After the code is uploaded successfully, the experiment will be switched every time SW1 is pressed. Five experiments are switched cyclically.
(1) If the key is not pressed, the remainder is 0, switch to the energy-efficient lighting experiment;
(2) Press the key, the remainder is 1, switch to the plant light system experiment;
(3) When the key is pressed for the second time , the remainder is 2, switch to the environment monitoring system experiment;
(4) When the key is pressed for the third time, the remainder is 3, switch to the irrigation system experiment;
(5) When the key is pressed for the fourth time, the remainder is 4, switch to the water wheel system experiment;
(6) When the key is pressed for the fifth time, the remainder is 0, back to the energy-efficient lighting experiment. Continuously press the key, the remainder of the cycle changes, the experiment also changes.