keyestudio 328P Development Board+ Motor Drive (DRV8835)

1. Description
When we do DIY electronic product experiments, we often program on the Arduino IDE with Arduino series microcontrollers.
This control board is fully compatible with the Arduino IDE development environment. It contains all the functions of the UNO R3 board. On its basis and for convenience, we optimize the board with two DC motor drive module, which can control one or two DC motors by DIP switch.
It is perfect for platforms and systems that need to control two DC motors, as well as related applications that require high current output from IO ports. Thus, this improvement makes its functions more powerful. Details are shown below.
In order to facilitate the connection, we also equipped a USB cable with a type-c interface of 1 meter in length.
2. Parameters
Microcontroller: ATMEGA328P-AU
USB-to-serial chip: CH340
Operating voltage: 5V
External voltage: DC 6-9V (9V is recommended)
Digital I/O pin: 14 (D0-D13)
PWM channel: 6 (D3 D5 D6 D9 D10 D11)
Analog input port(ADC): 8(A0-A7)
Dc output capability per I/O: 20 mA
Maximum output capability of a 5V port: 1.5A
Maximum power: 7.5W
Maximum output current of motor interface: 1.5A
Motor interface: 2P KF2510 2.54mm highly curved pin seat
Flash Memory: 32 KB (0.5 KB for bootstrap)
SRAM: 2 KB (ATMEGA328P-AU)
EEPROM: 1 KB (ATMEGA328P-AU)
Clock speed: 16MHz
On-board LED pin: D13
Weight: 25g
Dimensions: 75.6x53.5x14mm
3. Pin-out

4. Special Function Interfaces
Serial communication interfaces: D0 for RX, D1 for TX
PWM interface (pulse width modulation) : D3 D5 D6 D9 D10 D11
External interrupt interfaces: D2(interrupt 0), D3 (interrupt 1)
SPI communication interface: D10 for SS, D11 for MOSI, D12 for MISO, D13 for SCK
IIC communication ports: A4 for SDA, A5 for SCL
5. Arduino IDE on Windows
5.1 Install Arduino IDE
Install Arduino IDE first.
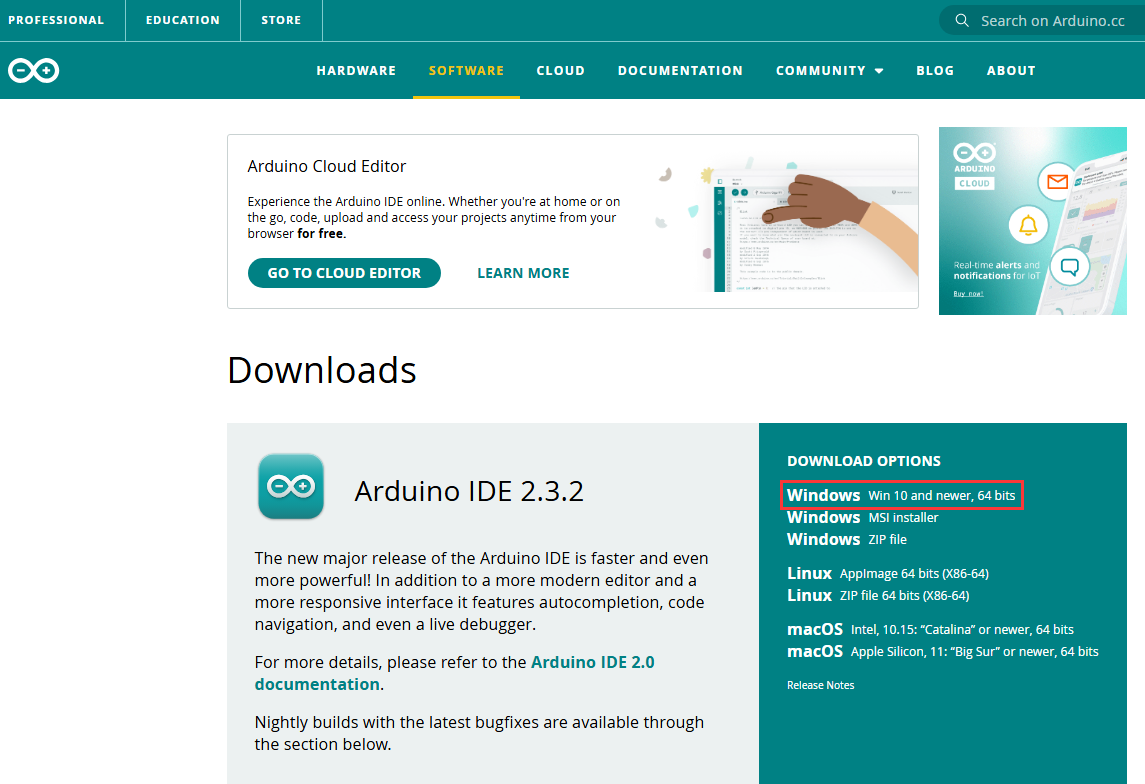
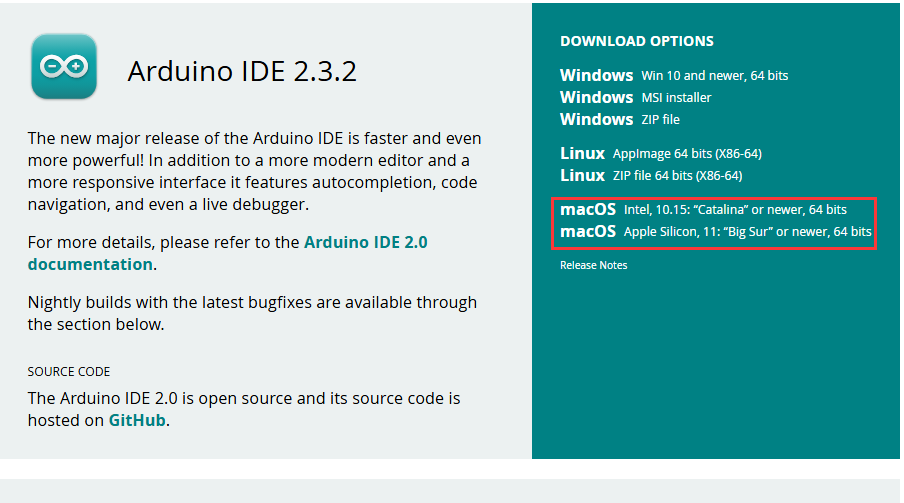
Arduino IDE official: https://www.arduino.cc/, click  as follows;
as follows;

Click Windows Win 10 and newer,64 bit to download and install the file.
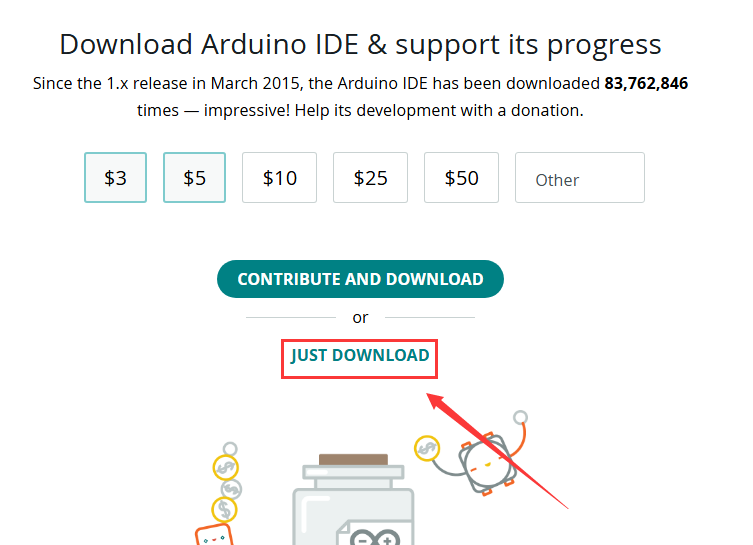
Click JUST DOWNLOAD.
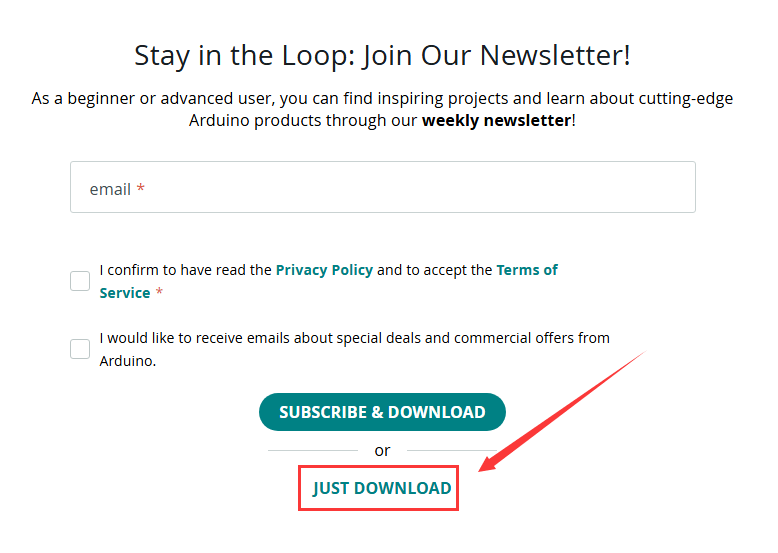
Click JUST DOWNLOAD again to download the package of arduino-ide_2.3.2_Windows_64bit.exe.
Downloaded:
Installation:
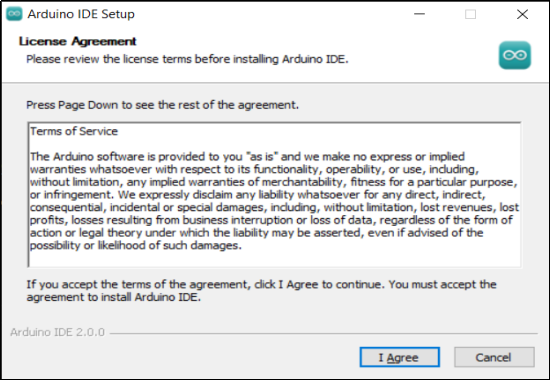
Click package arduino-ide_2.3.2_Windows_64bit.exe and you will see an interface, please click I Agree.
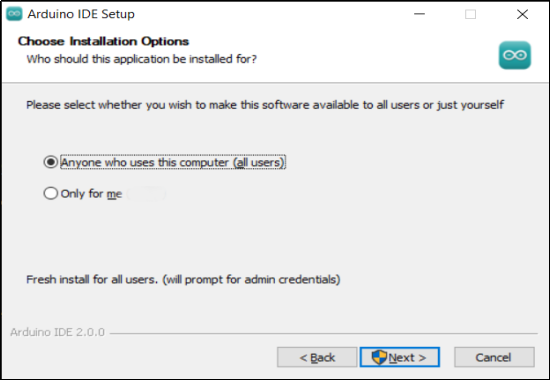
Tick Anyone who uses this computer (all users), and Next.
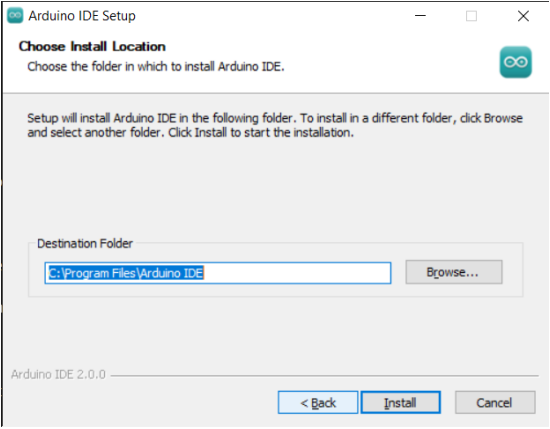
Click Browse... to choose a path for installation. Disk C is not recommended. After that, click Install.
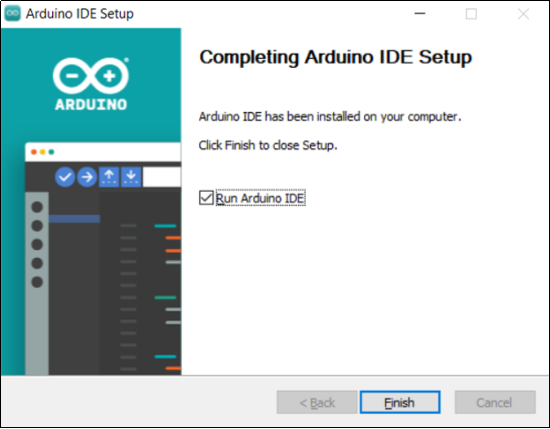
Installed:
5.2 Install Board USB Drive
Please visit:
Install CH340 Driver on Windows System — Getting started with Arduino documentation (keyestudio.com)
6. Arduino IDE on MAC
6.1 Install Arduino IDE
Choose the macOS version of Arduino IDE, and its download method is similar to that of Windows.
Once the download is complete, click it and follow the prompts to install.
6.2 Install Board USB Drive
Please visit:
Install CH340 Driver on MAC System — Getting started with Arduino documentation (keyestudio.com)
7. Motor Drive
7.1 Introduction
Keyestudio Motor PLUS Development Board boasts on-board two-way motor drive IO ports. One or both of motors can be enabled by DIP switch, and their speed can be controlled by PWM output.
Motor A port pin: D5(PWM), D4.
Motor B port pin: D6(PWM), D7.
4 LED indicators are welded on the board. When driving the motor, indicator(s) will light up due to a positive voltage output. So the out indicator(s) means negative voltage. Because of this, we may determine the rotation direction of motors.
A DIP controls the connection of the signal pin of the motor. If the switch is upward, the connection between the signal and the motor driver ic are connected. On the contrary, downwards means a disconnection.
As follows:
If the motor does not rotate after uploading the code, check whether this DIP switch is on.

7.2 Wiring

7.3 Logic Table for Motor Control
MA_E(D5) |
MA_P(D4) |
MA motor state |
MB_E(D6) |
MB_P(D7) |
MB motor state |
|---|---|---|---|---|---|
PWM:0-255 |
HIGH |
forward rotate |
PWM:0-255 |
HIGH |
forward rotate |
PWM:0-255 |
LOW |
reverse rotate |
PWM:0-255 |
LOW |
reverse rotate |
PWM:0 |
HIGH/LOW |
stop |
PWM:0 |
HIGH/LOW |
stop |
control rotation speed |
control rotation direction |
control rotation speed |
control rotation direction |
7.4 Test Code
Click to download the code:Download Code
int MA_E = 5; //pwm control rotation speed
int MA_P = 4; //power level control rotation direction
int MB_E = 6; //pwm control rotation speed
int MB_P = 7; //power level control rotation direction
void setup() {
// put your setup code here, to run once:
pinMode(MA_E, OUTPUT); //set pins to output
pinMode(MA_P, OUTPUT);
pinMode(MB_E, OUTPUT);
pinMode(MB_P, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
//forward rotate
analogWrite(MA_E, 255); //set MA speed to 255
digitalWrite(MA_P, HIGH); //set MA to forward rotate
analogWrite(MB_E, 255); //set MB speed to 255
digitalWrite(MB_P, HIGH); //set MB to forward rotate
delay(2000); //delay 2s
//reverse rotate
analogWrite(MA_E, 255);
digitalWrite(MA_P, LOW);
analogWrite(MA_E, 255);
digitalWrite(MB_P, LOW);
delay(2000);
//stop
analogWrite(MA_E, 0);
digitalWrite(MA_P, LOW);
analogWrite(MB_E, 0);
digitalWrite(MB_P, LOW);
delay(2000);
}
7.5 Test Result
After uploading the code, motors rotate forward for 2 seconds at a PWM speed of 255, and then reverse for 2 seconds at the same speed, and last stop for 2 seconds. These actions circulate.