Micro:bit Hand Biting Crocodile Tutorial
1.Servo
1.1 Introduction
Servo is a position control rotary actuator. It mainly consists of a housing, a circuit board, a core-less motor, a gear and a position sensor. Its working principle is that the servo receives the signal sent by MCUs or receivers and produces a reference signal with a period of 20ms and width of 1.5ms, then compares the acquired DC bias voltage to the voltage of the potentiometer and obtains the voltage difference output.
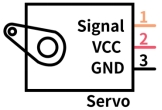
In general, servo has three wires: brown, red and orange. The brown wire is grounded, the red one is a positive pole wire and the orange one is a signal wire.
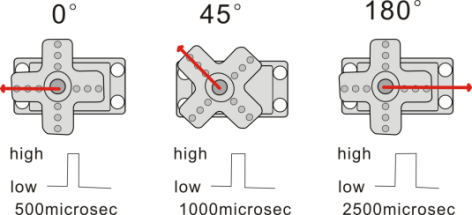
The rotation angle of servo is controlled by regulating the duty cycle of PWM (Pulse-Width Modulation) signal. The standard cycle of PWM signal is 20ms (50Hz). Theoretically, the width is distributed between 1ms-2ms, but in fact, it’s between 0.5ms-2.5ms. The width corresponds the rotation angle from 0° to 180°.
1.2 Specification
Working voltage: DC 3.3V〜5V
Operable angle range: approximately 180° (at 500→2500 μsec)
Pulse width range: 500→2500 μsec
No-load speed: 0.12±0.01 sec/60 (DC 4.8V) 0.1±0.01 sec/60 (DC 6V)
No-load current: 200±20mA (DC 4.8V) 220±20mA (DC 6V)
Stopping torque: 1.3±0.01kg·cm (DC 4.8V) 1.5±0.1kg·cm (DC 6V)
Stop current: ≦850mA (DC 4.8V) ≦1000mA (DC 6V)
Standby current: 3±1mA (DC 4.8V) 4±1mA (DC 6V)
1.3 Wiring Diagram
Expansion Board |
Servo |
|---|---|
GND |
G(Brown) |
3V3 |
V(Red) |
P1 / io14 |
S(Yellow) |

1.4 Code
Note: The rotation angle of the servo is 0-180 degrees, but if the crocodile has been assembled, the angle must be rotated between 55-130 degrees, otherwise the servo will get hot and burn out.
Code File:
Download link:Download
Download the code file and unzip it, then double-click microbit-1-Servo_Code1.hex to open the file and upload the code.

Add code manually:
1.Tap  to add servo library.
to add servo library.

2.Input “Servo” and click to add Servo library.
to add Servo library.

3.It is successfully added.

4.Drag  into
into  from
from  ,and set the pin to P1 and Angle to 55 °.
,and set the pin to P1 and Angle to 55 °.
5.Drag from
from  and place it under the
and place it under the  ,and set the delay to 1000ms.
,and set the delay to 1000ms.
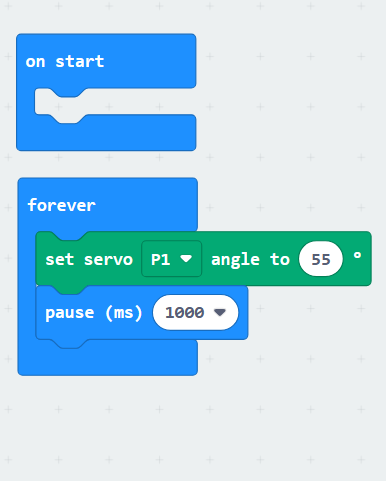
6.Repeat steps 4 and 5 to add the code blocks to set the servo to 90 ° and 110 ° with a delay of 1000ms.
Complete Code:

1.5 Test Result
After uploading the code, the crocodile will open its mouth for 1s, then close half of its mouth for 1s, and then completely close its mouth.
1.6 Extended Tutorial
Earlier we have controlled the crocodile to open and close its mouth at a wide angle, so how to control the crocodile to slowly close and open its mouth?
1.6.1 Code
Code File:
Download link:Download
Download the code file and unzip it, then double-click microbit-1-Servo_Code2.hexto open the file and upload the code.

Add code manually:
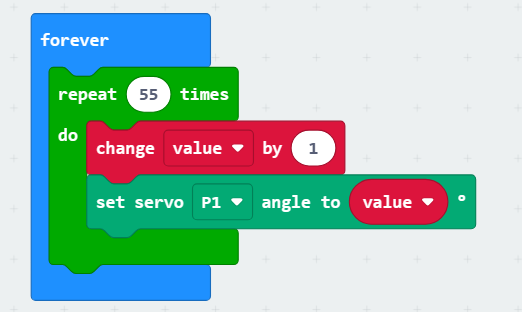
1.Click in
in  and add a variable named value.
and add a variable named value.

2.Drag from into
from into ,and set the value to 55 in the white box.
,and set the value to 55 in the white box.

3.Drag from
from  into,and set the repeat times in the white box to 55.
into,and set the repeat times in the white box to 55.

4.Drag from into
from into .
.

5.Drag and from place it under the,and set pin to P1.

6.Drag from and place it in the in the white box of
from and place it in the in the white box of  .
.
7.Dragfrom and place it under the  ,and set the delay to 30ms.
,and set the delay to 30ms.

9.Right-clickand tap Duplicate”.

10.Add the copied code block below 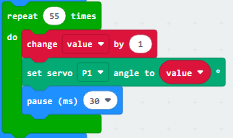 ,then modify “1” in the white box of to “-1”.
,then modify “1” in the white box of to “-1”.
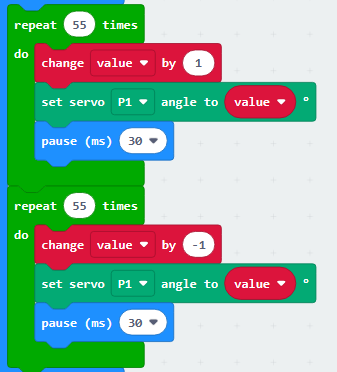
Complete Code:

1.6.2 Test Result
After uploading the code, the crocodile will slowly open its mouth and then slowly close it.
2.Ultrasonic Module
2.1 Introduction
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like what bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. It comes with an ultrasonic transmitter and a receiver.
It is being used in a wide range of electronics projects for creating obstacle detection and distance measuring application as well as various other applications.
2.2 Specification
Working voltage:3.3-5V
Quiescent current: <2mA
Working current: 15mA
Effective angle: <15°
Distance range: 2cm – 400 cm
Accuracy: 0.3 cm
Measuring angle: 30 degrees
Trigger input pulse width: 10 microseconds

2.3 Wiring Diagram
Expansion Board |
Module |
|---|---|
GND |
G |
3V3 |
V |
P8 / io4 |
Trig |
P12 / io15 |
Echo |

2.4 Code
Note: The measuring distance of ultrasonic is 2-300cm, but after being assembled on the crocodile, it can only detect 4-30cm. For the ultrasonic receives the bounced signal at a certain angle, but the basswood board of the crocodile body blocks it. As a result, only 30cm can be recognized, but this does not affect our hand biting crocodile tutorial.
Code File:
Download link:Download
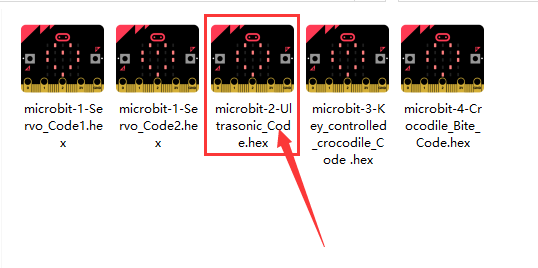
Download the code file and unzip it, then double-click microbit-2-Ultrasonic_Code.hexto open the file and upload the code.
Add code manually:
1.Tapto add sonar library.
2.Input “sonar”and clickto add sonar library.
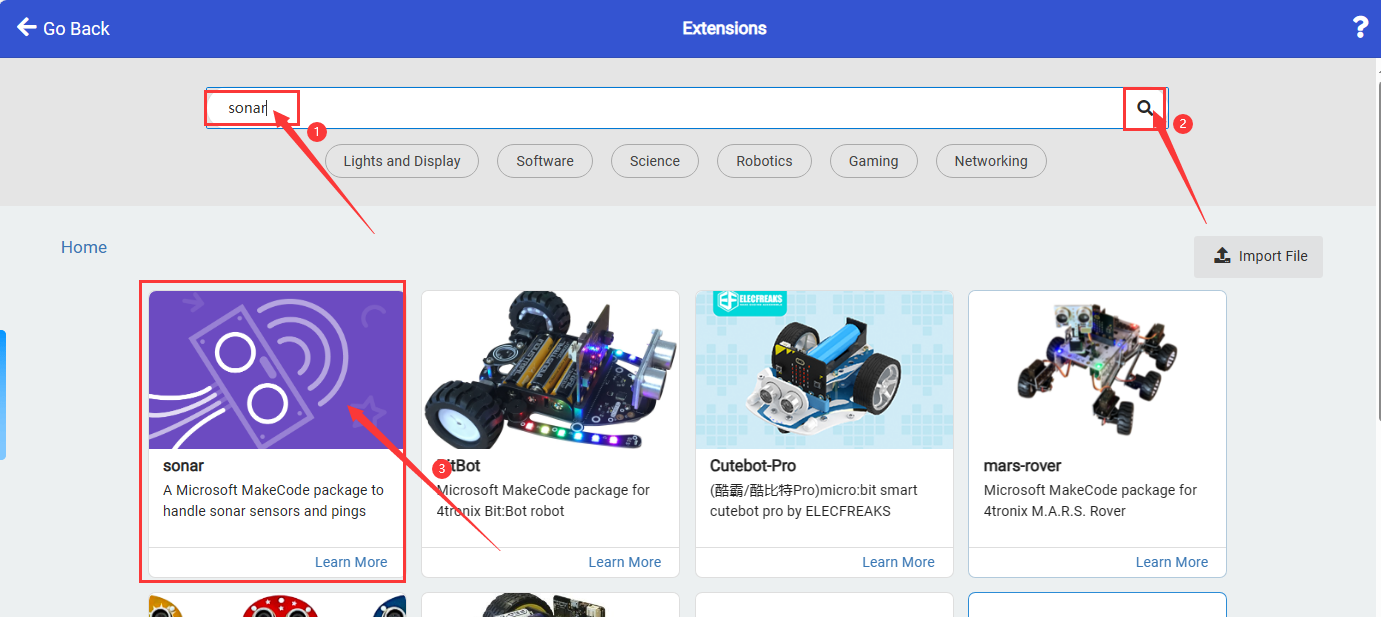
3.The sonar library is added.

4.Drag from
from  into .
into .
5.Click in and add a variable named value.
6.Dragfrom into.
7.Drag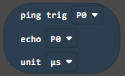 from
from  into the white box of ,and set trig to P8 pin, echo to P12 pin, unit to CM.
into the white box of ,and set trig to P8 pin, echo to P12 pin, unit to CM.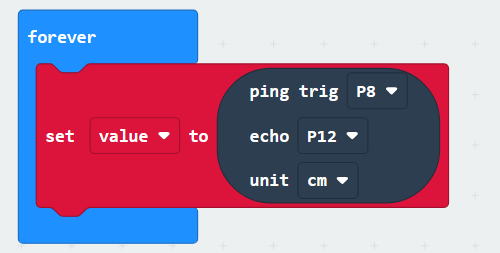
8.Drag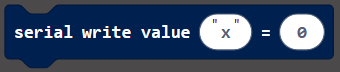 from and place it under the
from and place it under the 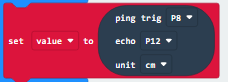 ,and modify the character in the first white box to “distance=”.
,and modify the character in the first white box to “distance=”.
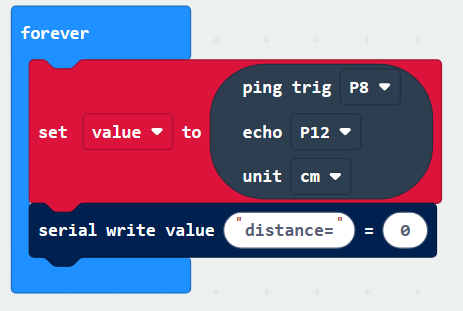
9.Dragfrom and place it into the second white box of .
.

10.Dragfrom and place it under the  ,and modify the delay to 500ms.
,and modify the delay to 500ms.
Complete Code:

2.5 Test Result
If you cannot print data in the browser’s makecode compilation interface, use CoolTerm software. Details are in the micro bit basic tutorial.
After uploading the code, open the CoolTerm software, click Options, select SerialPort, set the COM port and baud rate to 115200 (after testing, the USB serial communication baud rate of the micro:bit board is 115200), then click OK and Connect.
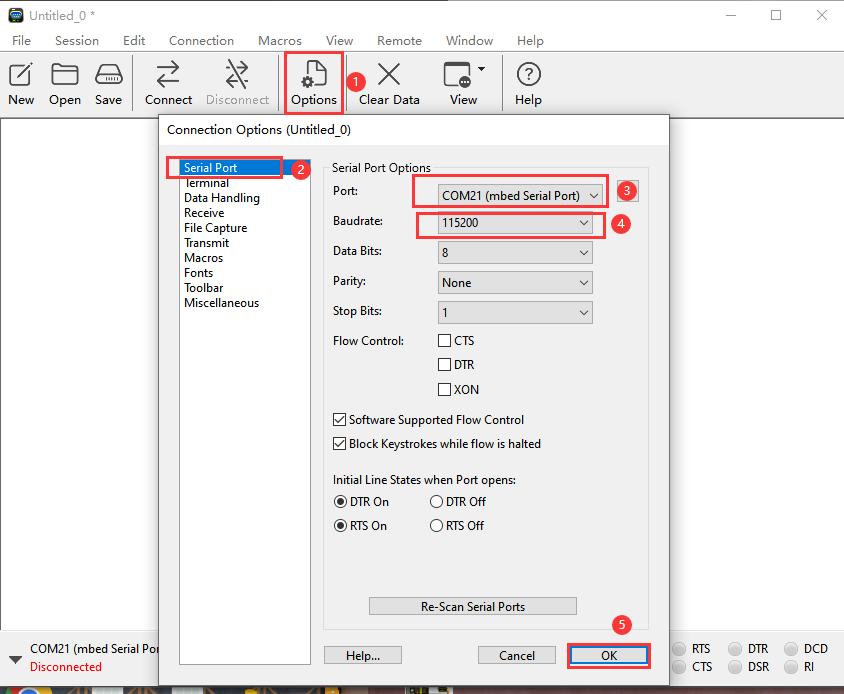
After the setting is completed, we can see the distance sensed by the ultrasonic in the serial port printing area. The serial port printing distance will be printed every 0.5s.

3.Buttons Control the Crocodile
3.1 Introduction
In this project, we work to control the crocodile to open and close its mouth through the AB buttons on the microbit.
3.2 Code
Code File:
Download link:Download
Download the code file and unzip it, then double-click microbit-3-Key_controlled_crocodile_Code .hex to open the file and upload the code.

Add code manually:
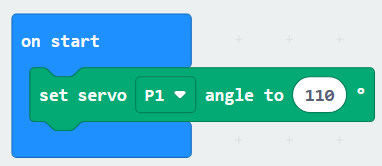
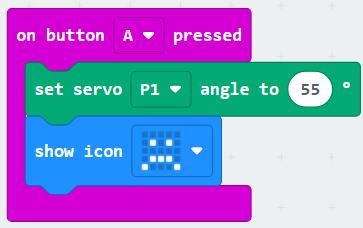
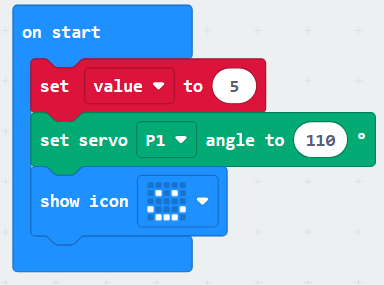
1.Add servo library then dragfrom and place it into,and set the pin to P1 and the angle to 110°.
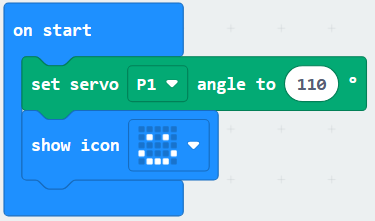
2.Drag from and place it into,and set the dot matrix to display
from and place it into,and set the dot matrix to display .
.
3.Drag from
from  , then add the set servo to 55 ° code and the dot matrix displays
, then add the set servo to 55 ° code and the dot matrix displays code.
code.
4.Copyand alter button to B,then set servo angle to 110°,dot matrix displays.

Complete Code:

3.3 Test Result
After the code is uploaded successfully, press the button A and the crocodile will display and close its mouth. Press the button B and the crocodile will displayand open its mouth.
4.Hand Biting Crocodile
4.1 Introduction
The crocodile opens its mouth. When you put your hand into the crocodile’s mouth, the ultrasonic on the crocodile will measure the depth of your hand into the crocodile’s mouth. When it reaches the depth we set, the crocodile will bite.
4.2 Code
Code File:
Download link:Download
Download the code file and unzip it, then double-click microbit-4-Crocodile_Bite_Code.hex to open the file and upload the code.
Add code manually:
1.Add the servo library and the ultrasonic library, and generate variables “distance” and “value”.
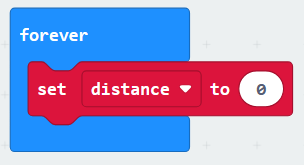
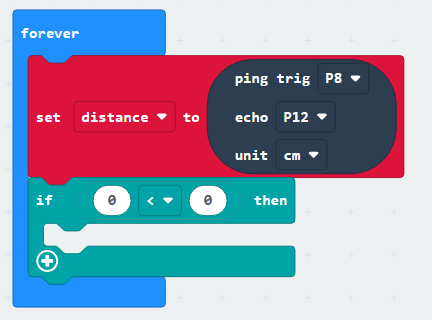
2.Add 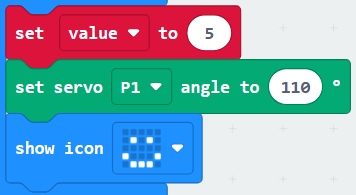 into.
into.
2.Addinto,and set variable to ‘distance’.
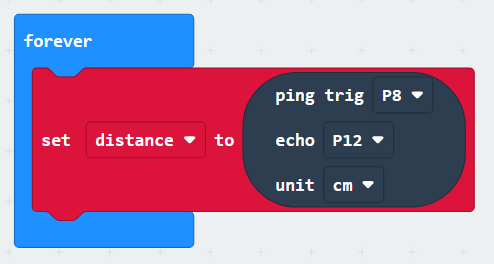
3.Addinto ,and set trig to P8 pin, echo to P12 pin, unit to CM.
,and set trig to P8 pin, echo to P12 pin, unit to CM.
4.Drag from
from  and place it under the
and place it under the 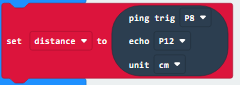 .
.

5.Drag from and place it under the diamond box of .
from and place it under the diamond box of .
6.Add to the left box of ,
to the left box of , to the right box of;distance < value.
to the right box of;distance < value.

7.Addinto  .
.

8.Drag from
from  into,and set the value to 3 to 8.
into,and set the value to 3 to 8.

9.Add code in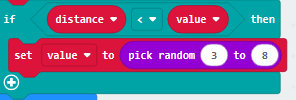 ,first, set the servo to 55°,dot matrix displays ,and delays 3s,then set the servo to 110°,dot matrix displaysand delays 1s.
,first, set the servo to 55°,dot matrix displays ,and delays 3s,then set the servo to 110°,dot matrix displaysand delays 1s.
Complete Code:

4.3 Test Result
After the code is successfully uploaded, the crocodile opens its mouth, and the dot matrix displays. When the distance between the hand and the ultrasonic meets the crocodile’s bite conditions, the crocodile bites and the dot matrix displays . The crocodile releases its mouth after 3s of bite. and the dot matrix displays, the final 1s delay is to prepare for retracting the hand from the crocodile’s mouth. After 1s, it enters the next hand-biting process.