Die Installation des Keyestudio 4WD Mecanum Robot Car V2.0
Schritt 1
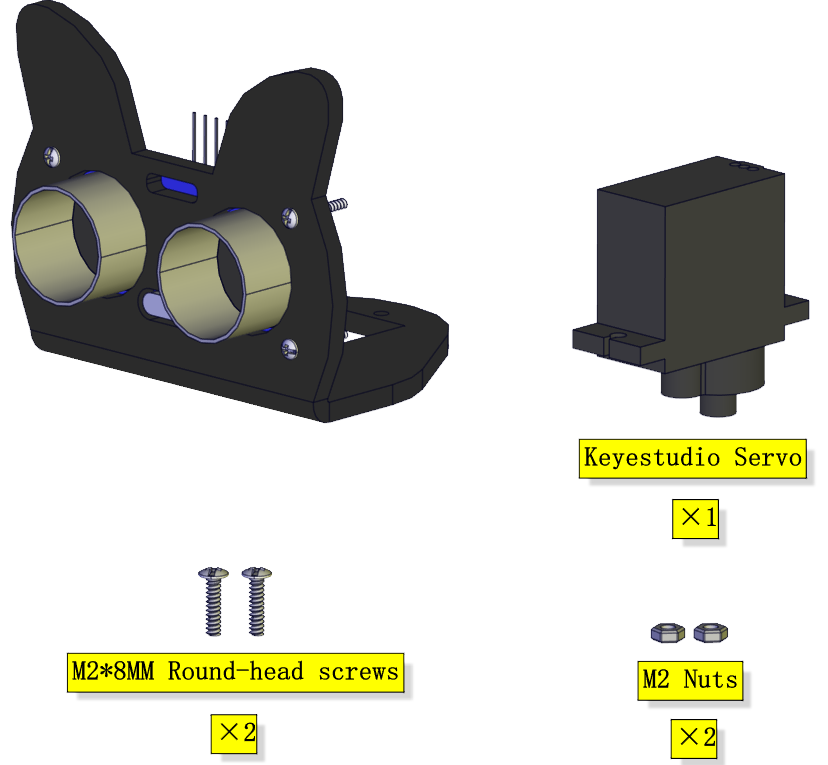
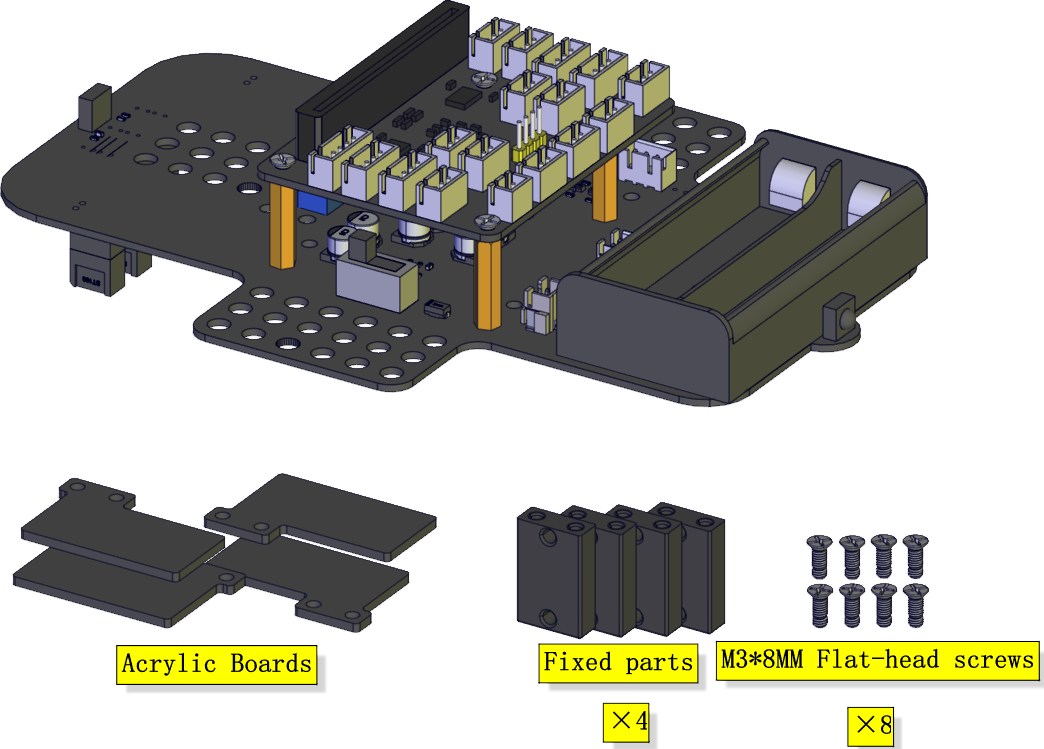
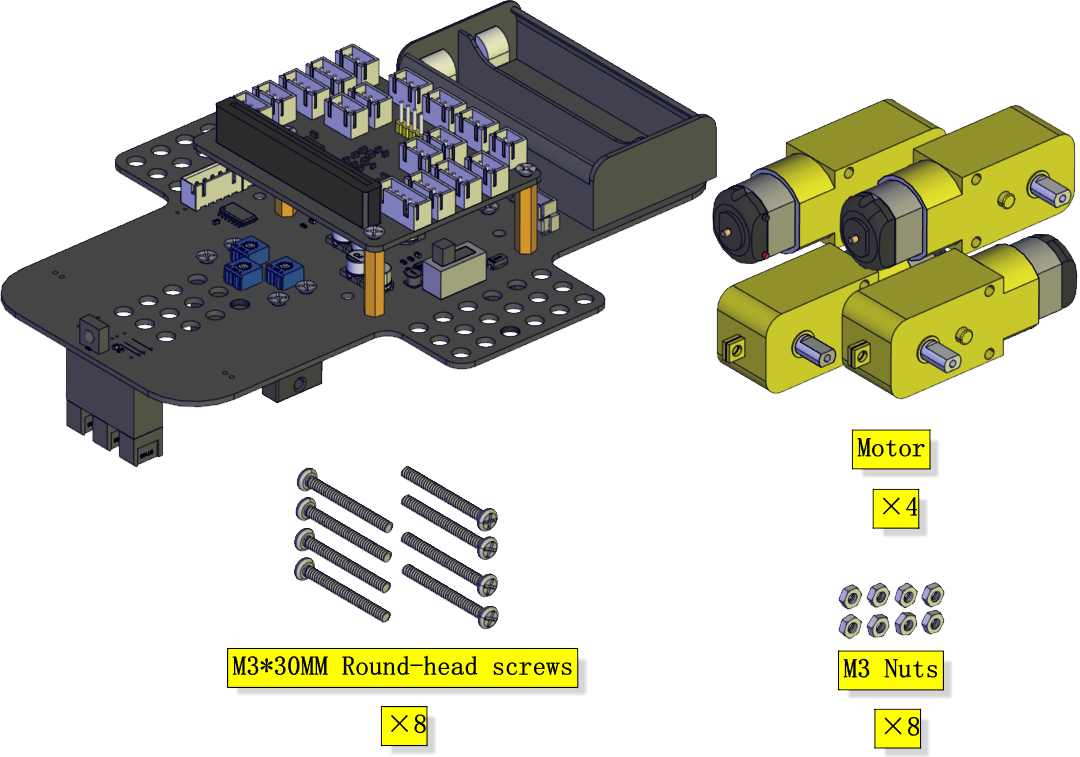
Benötigte Komponenten:
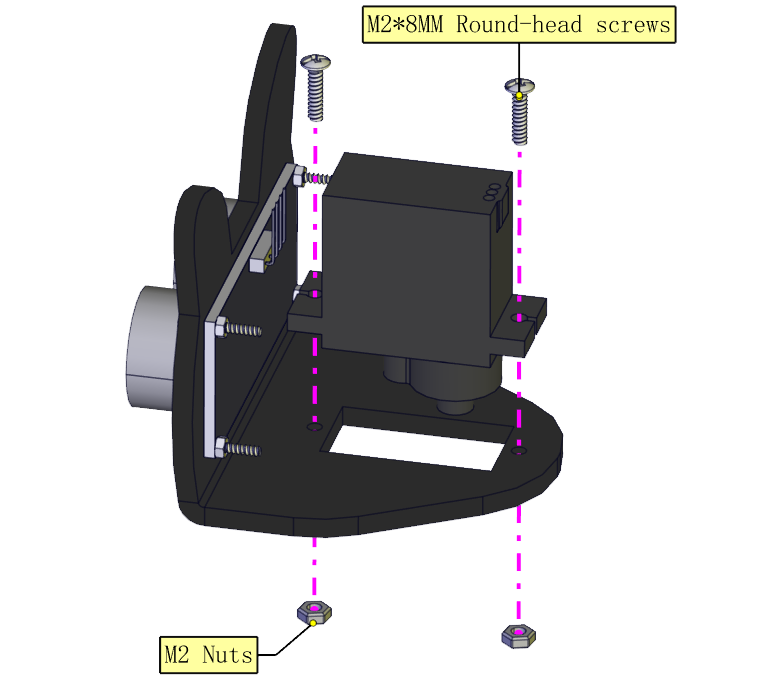
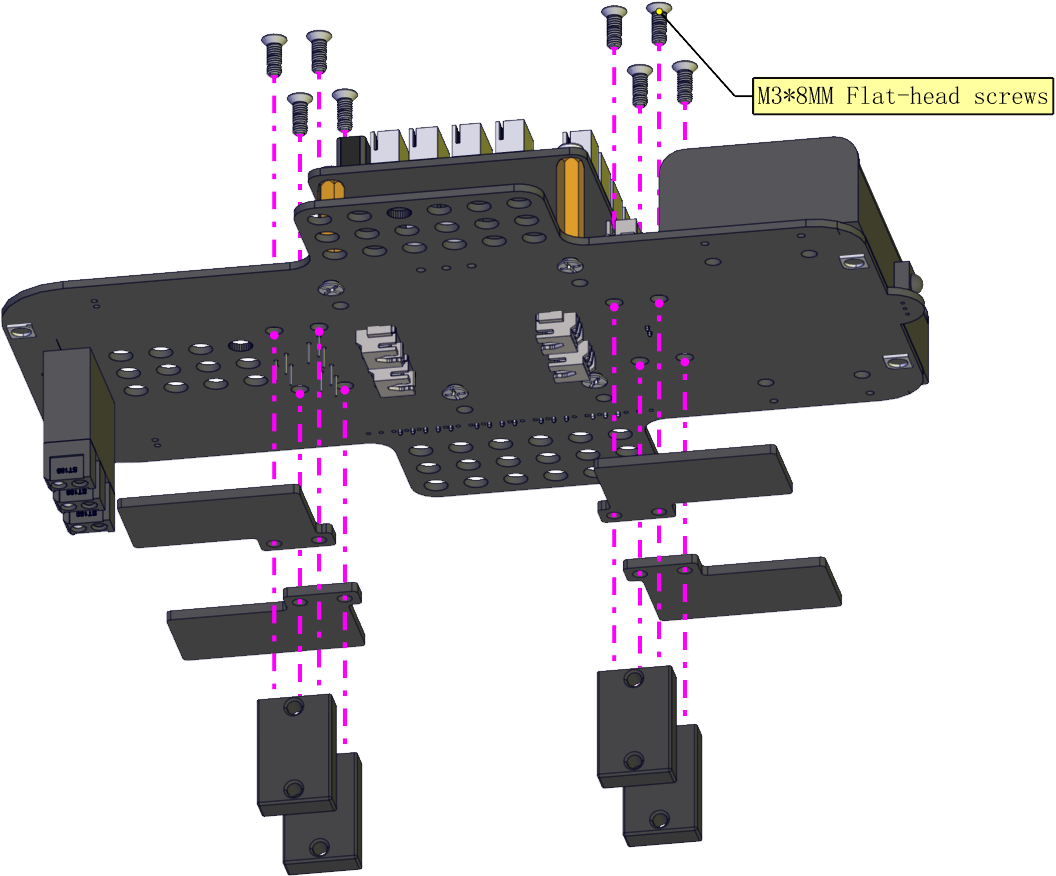
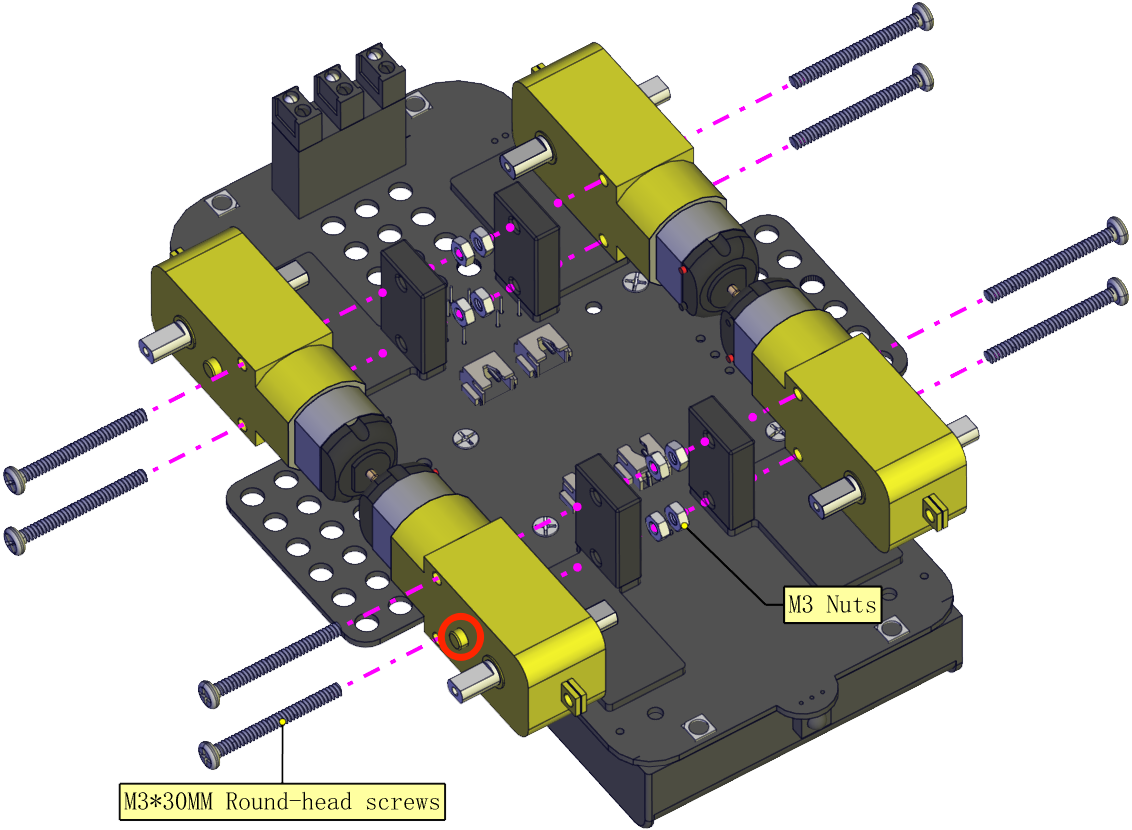
Installationsdiagramm:
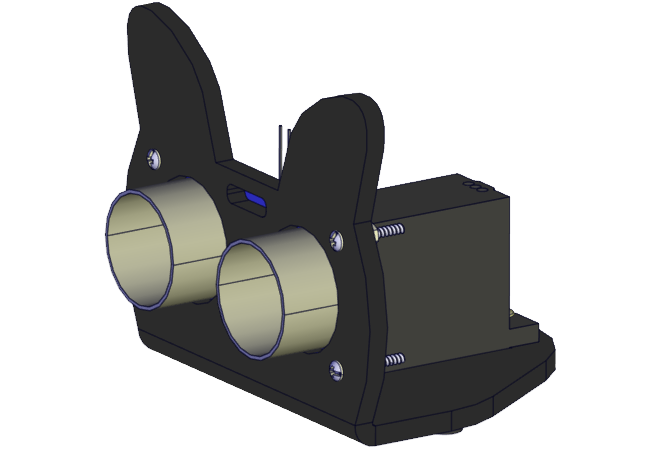
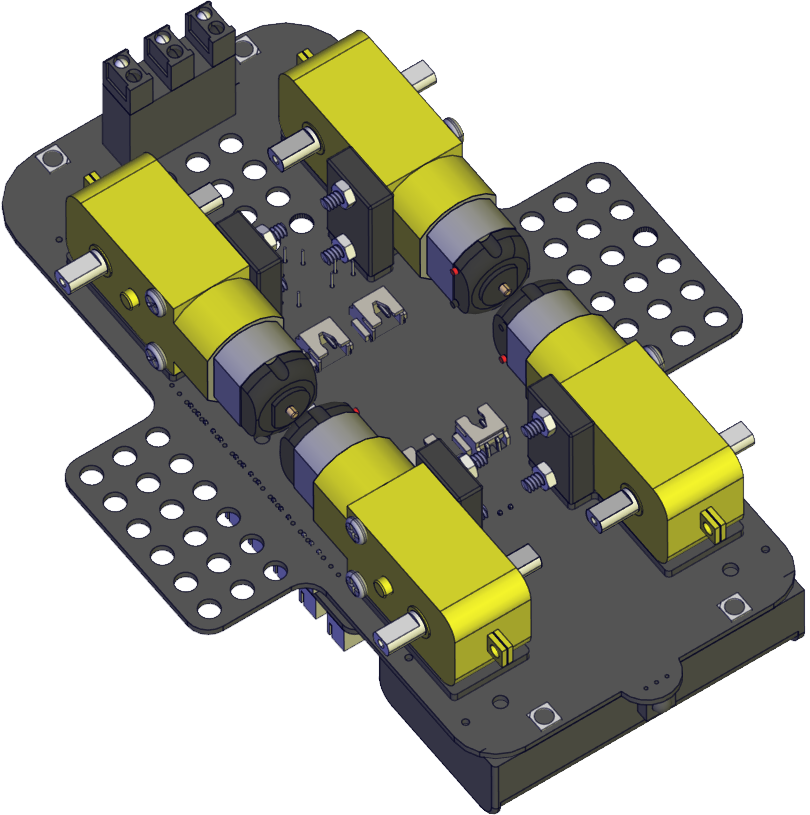
Prototyp:
Schritt 2
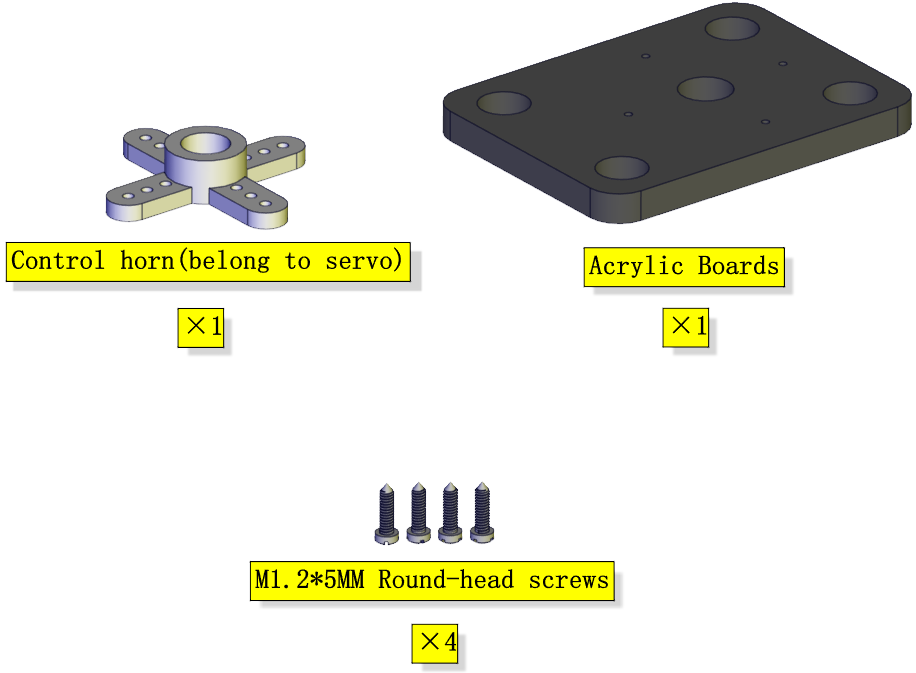
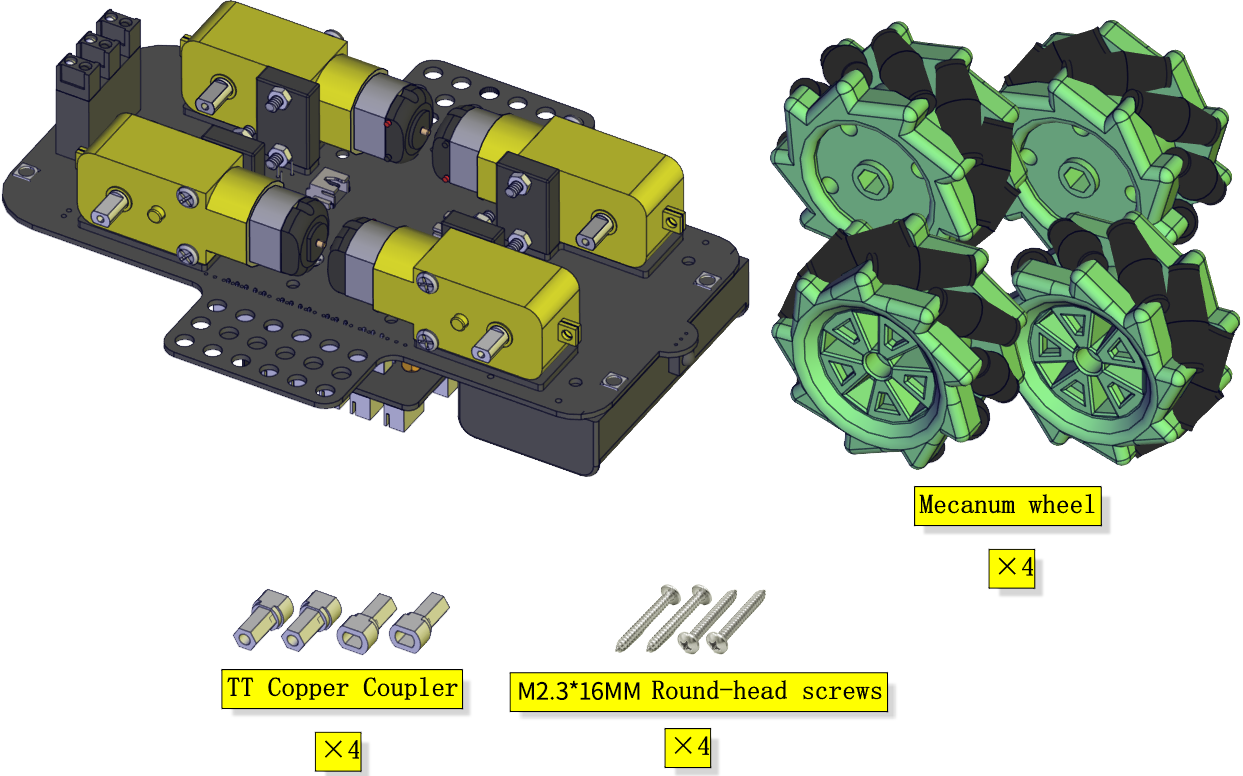
Benötigte Komponenten:
Installationsdiagramm:
Prototyp:
Schritt 3
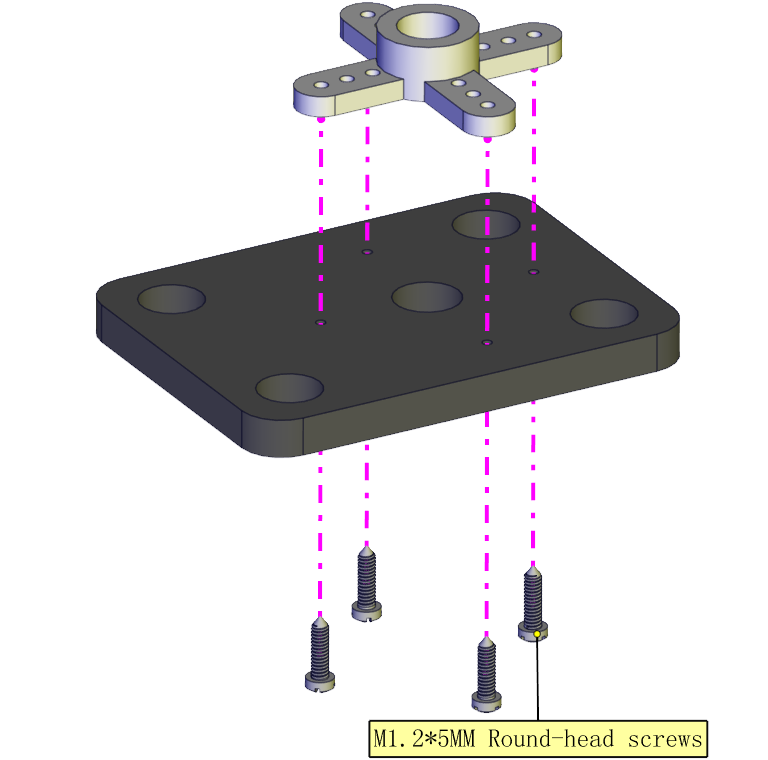
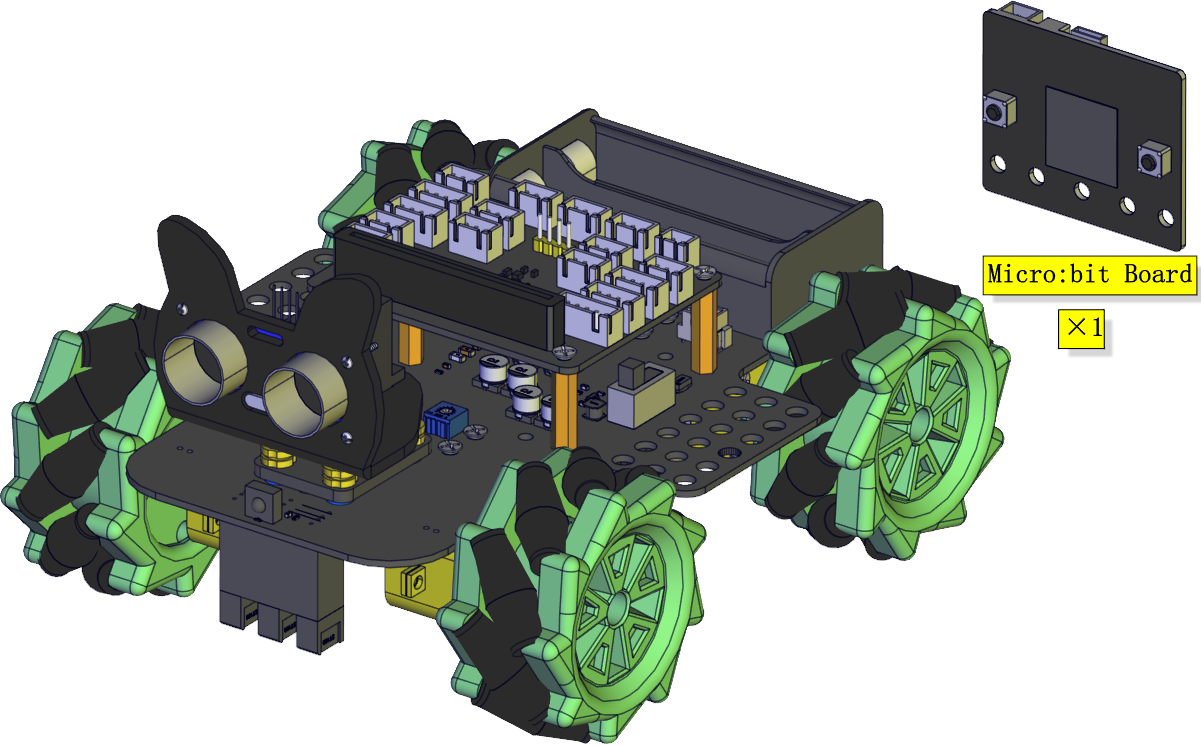
Benötigte Komponenten:
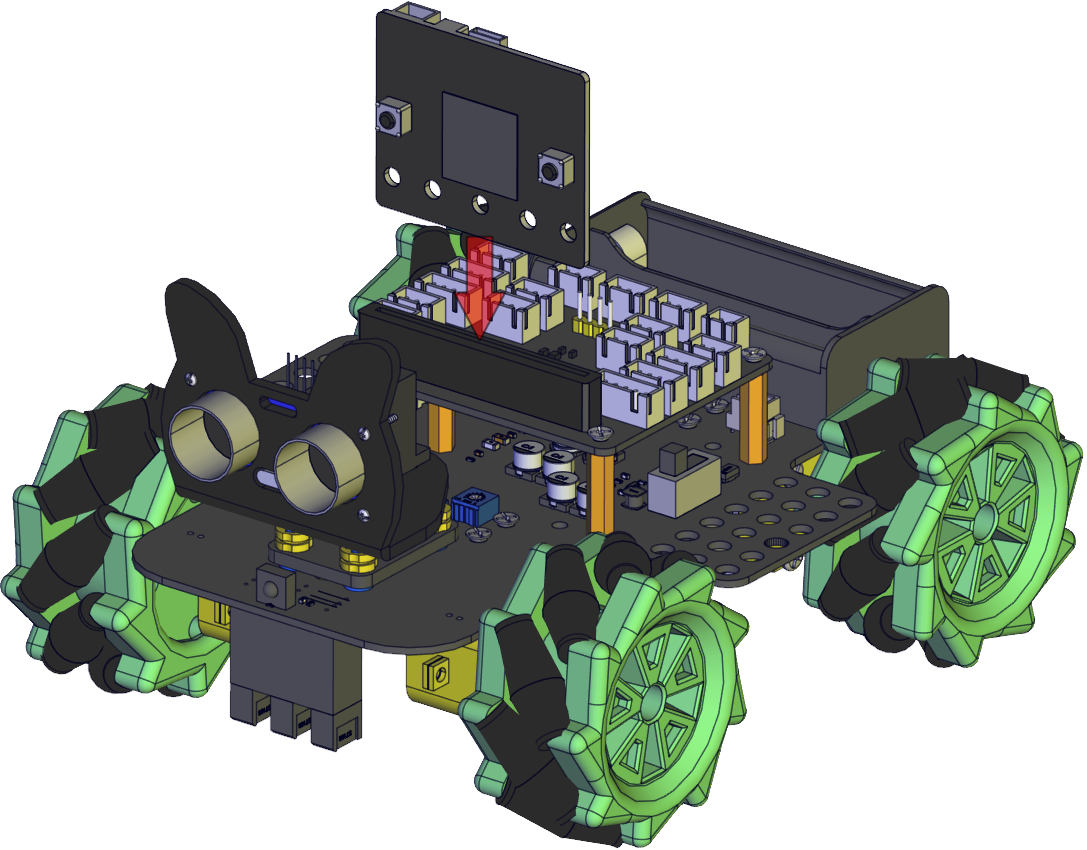
Installationsdiagramm:
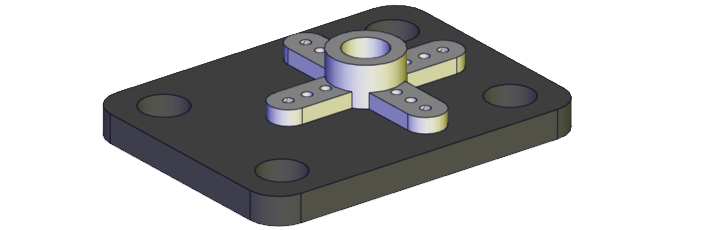
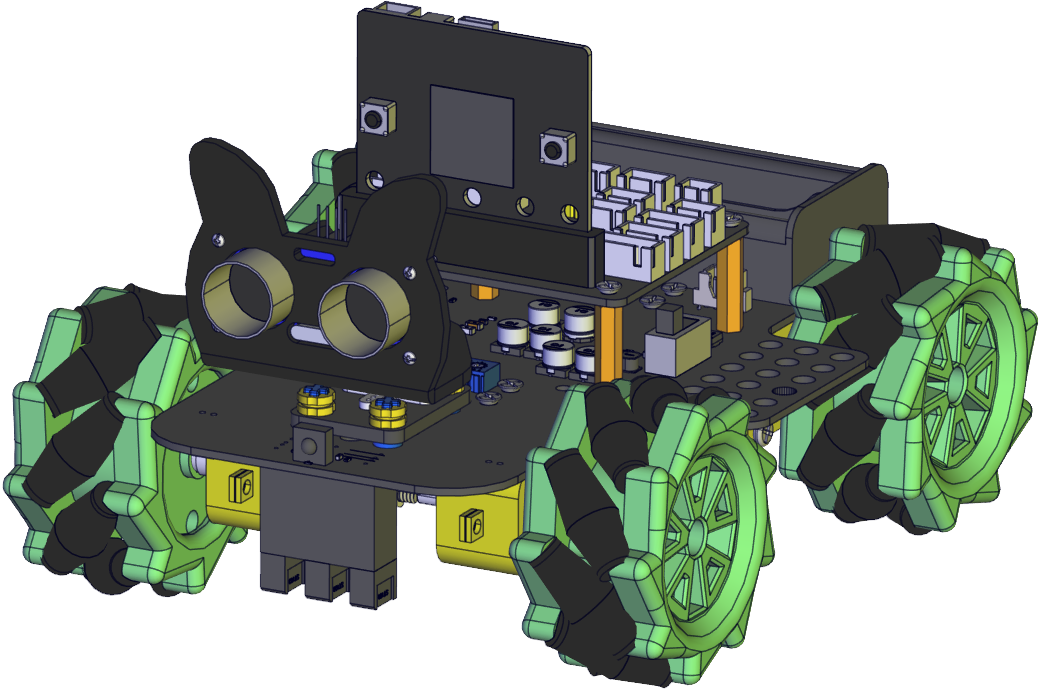
Prototyp:
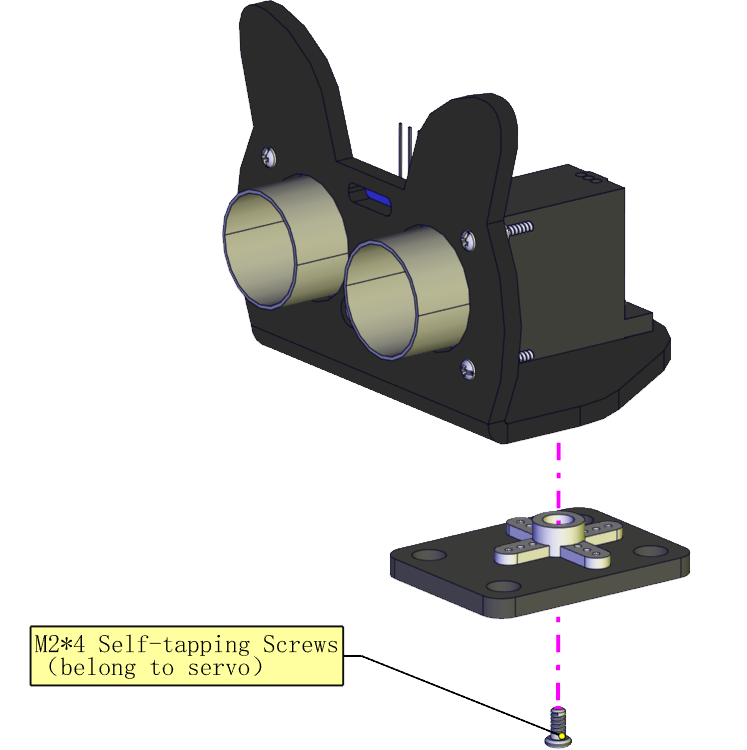
Schritt 4
(stellen Sie zuerst den Winkel des Servos ein)
Stellen Sie den Winkel des Servos auf 90 Grad ein.
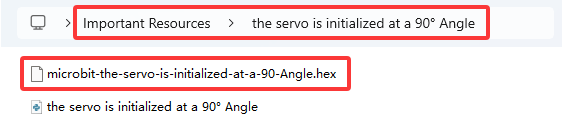
Methode 1: MakeCode-Code
⚠️Besondere Anmerkung: Bevor Sie den Code schreiben und hochladen, müssen Sie die MakeCode-IDE verstehen und Bibliotheksdateien hinzufügen. Bitte gehen Sie zu folgendem Link: Get Started with makecode

Der obige MakeCode-Code liegt im Material bei. Öffnen Sie den Einstellungs-Code für den Servo und schreiben Sie ihn auf das microbit-Motherboard des 4WD Mecanum Robot Car V2.0, und schalten Sie die Stromversorgung über ein micro-USB-Kabel oder eine externe Stromversorgung ein (drehen Sie den DIP switch auf ON). Das war’s. Der Code befindet sich an der im Bild gezeigten Position:
Methode 2:Python-Code
⚠️Besondere Anmerkung: Bevor Sie den Code schreiben und hochladen, müssen Sie die Mu IDE installieren und Bibliotheksdateien hinzufügen. Bitte gehen Sie zu folgendem Link: Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
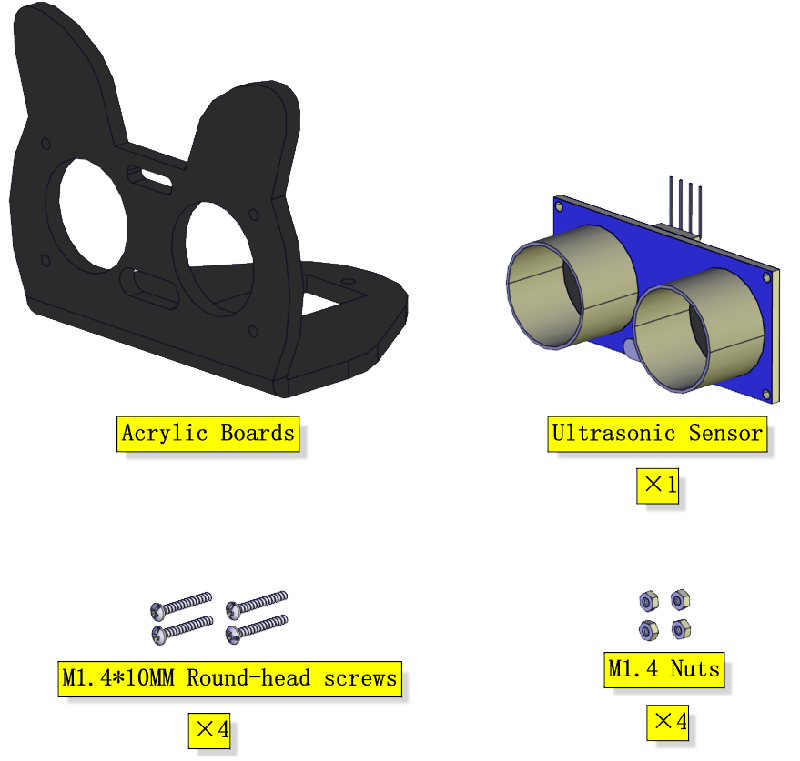
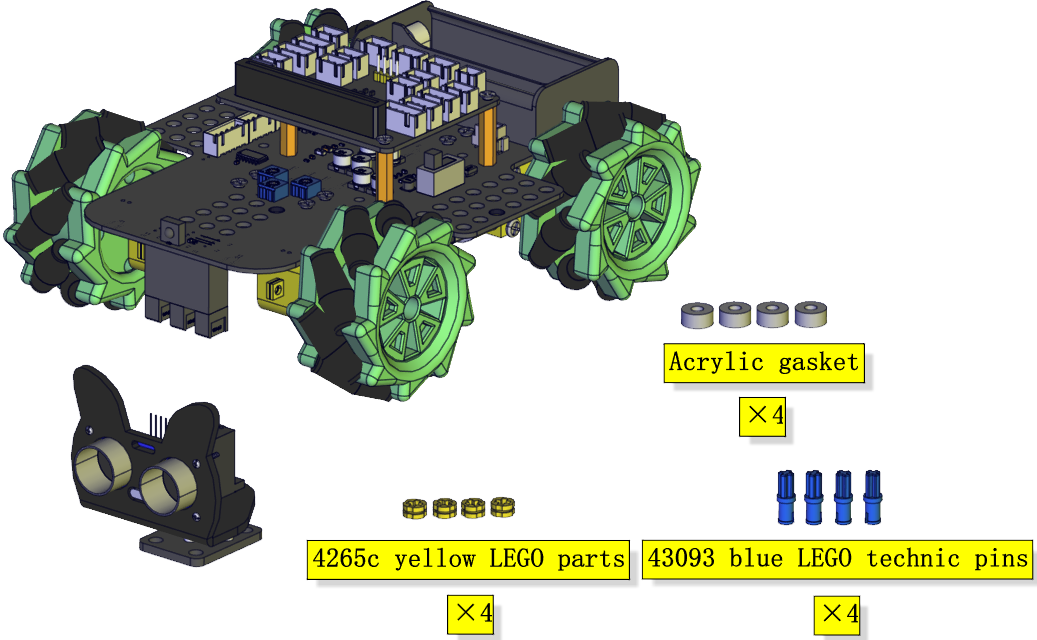
Benötigte Komponenten:
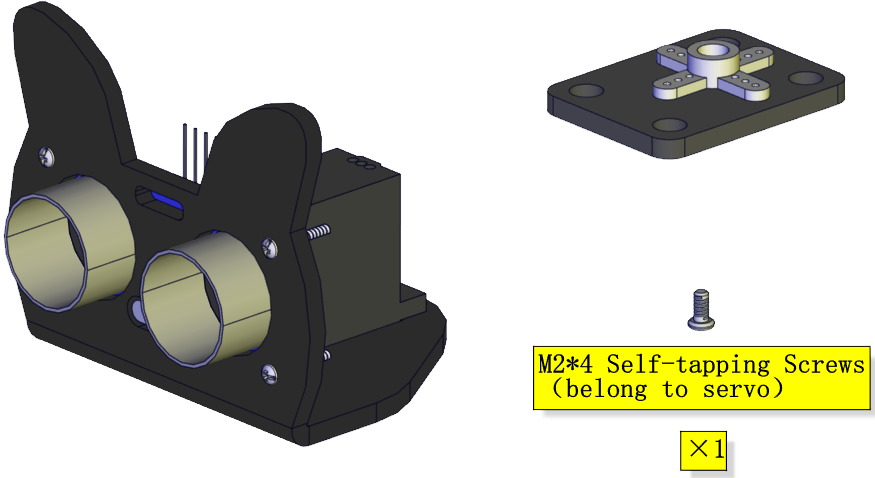
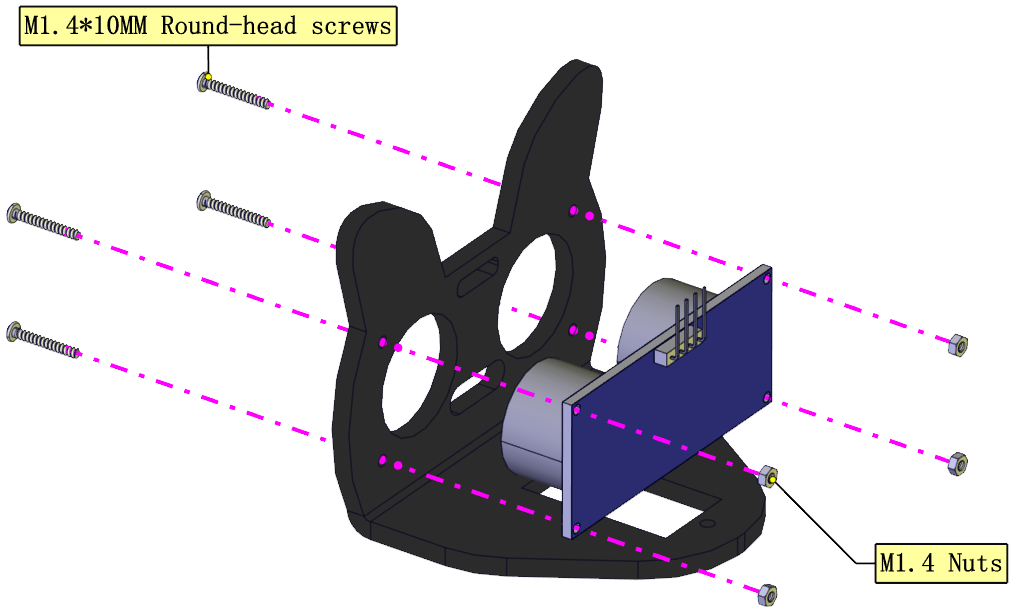
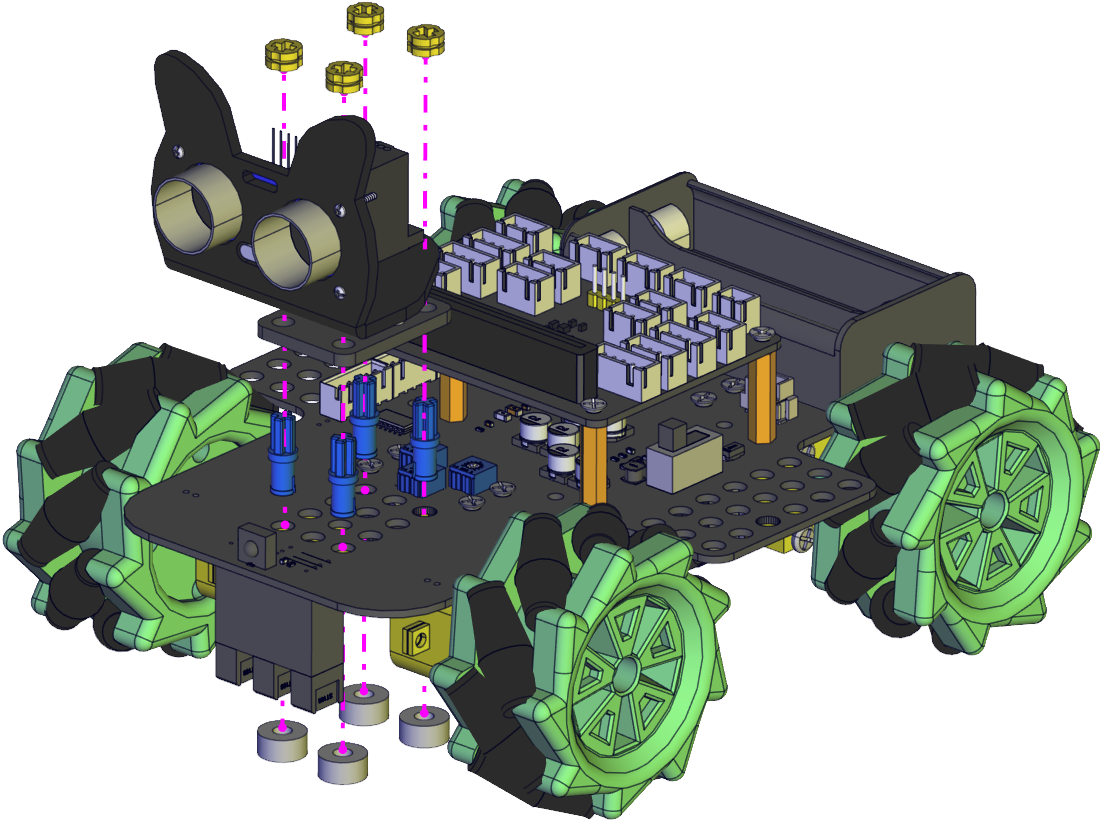
Installationsdiagramm: (achten Sie auf die Einbaurichtung)
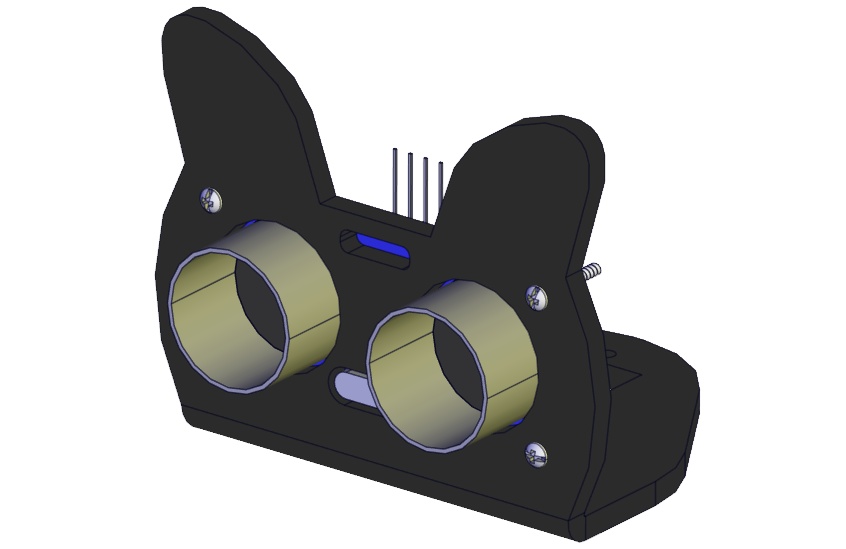
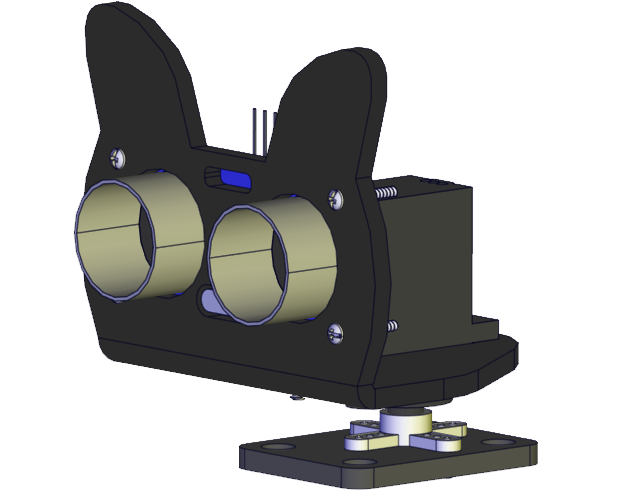
Prototyp:
Schritt 5
Benötigte Komponenten:
Installationsdiagramm:
Prototyp:
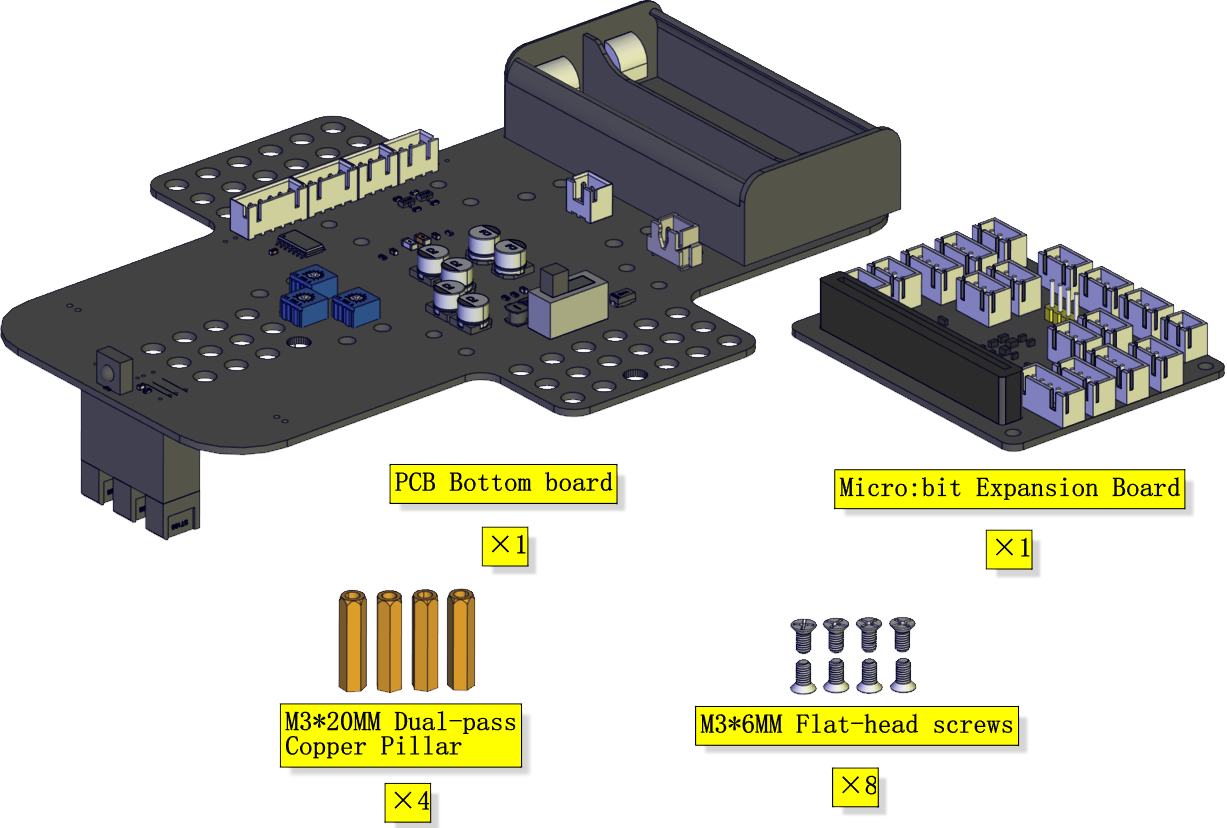
Schritt 6
Benötigte Komponenten:
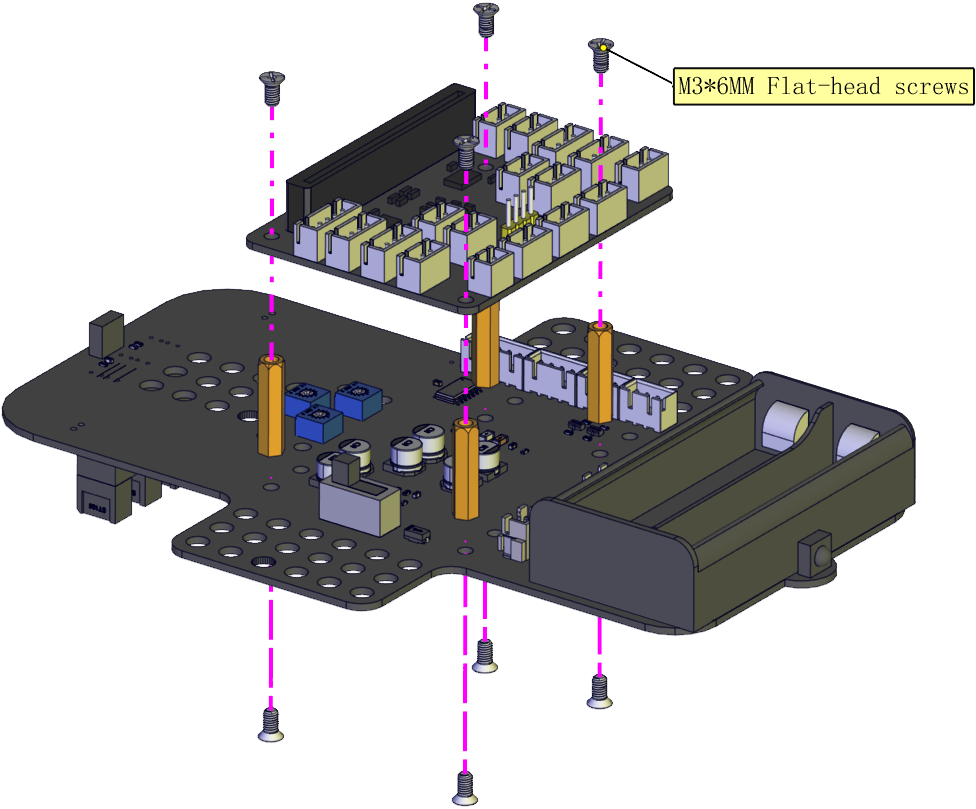
Installationsdiagramm:
Prototyp:
Schritt 7
Benötigte Komponenten:
Installationsdiagramm: (achten Sie auf die Richtung des Motors)
Prototyp:
Schritt 8
Benötigte Komponenten:
Installationsdiagramm: (achten Sie auf die Einbaurichtung des Mecanum-Rads)
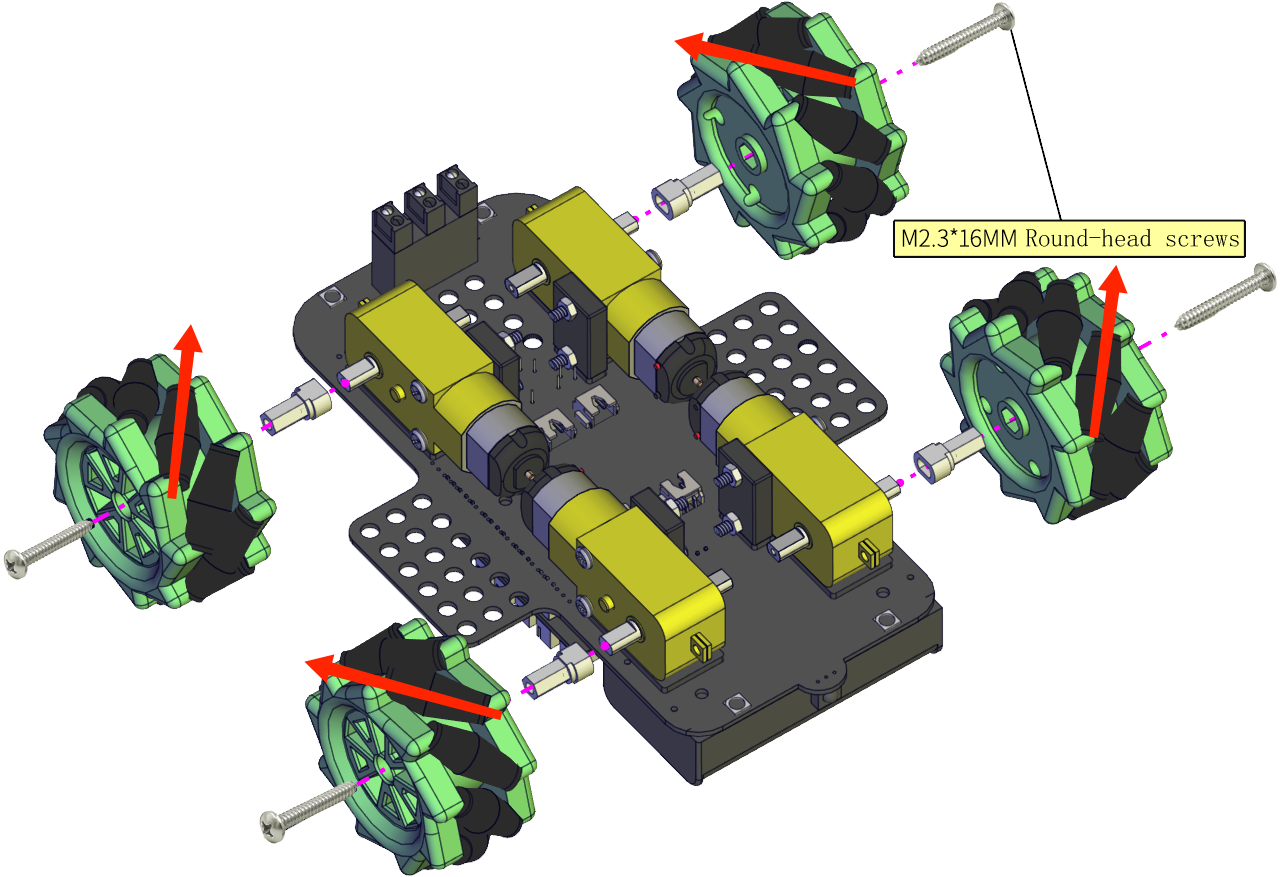
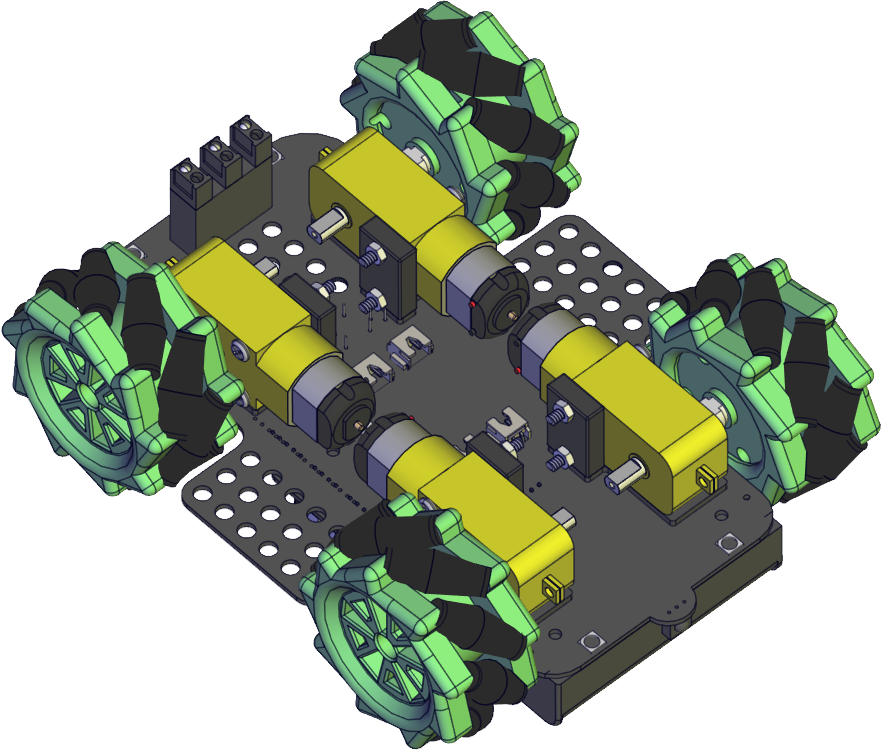
Prototyp:
Schritt 9
Benötigte Komponenten:
Installationsdiagramm:
Prototyp:
Schritt 10
Benötigte Komponenten:
Installationsdiagramm:
Prototyp:
Schaltplan
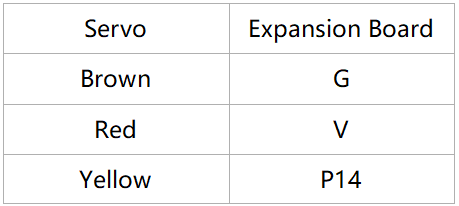
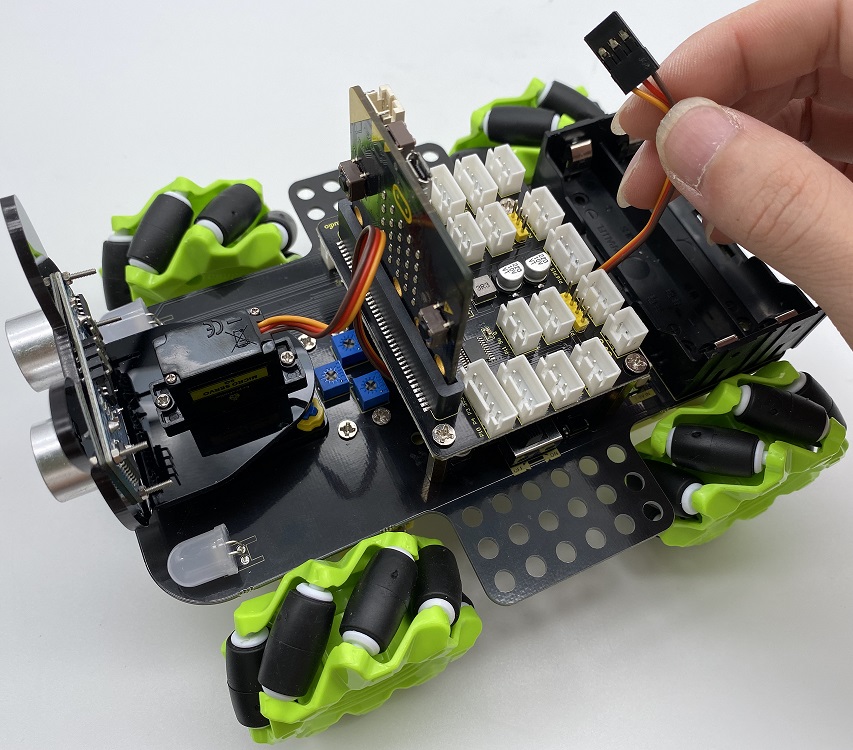
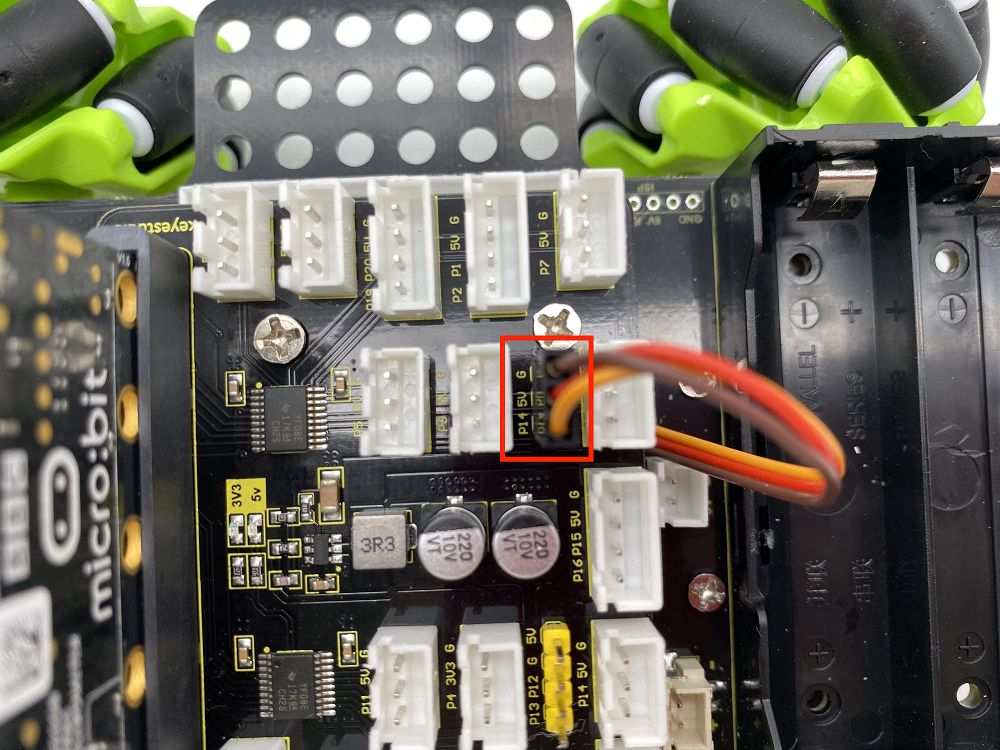
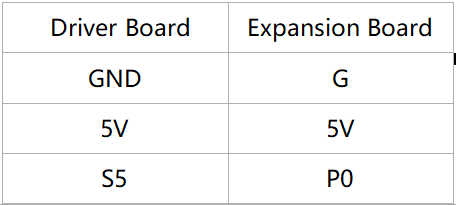
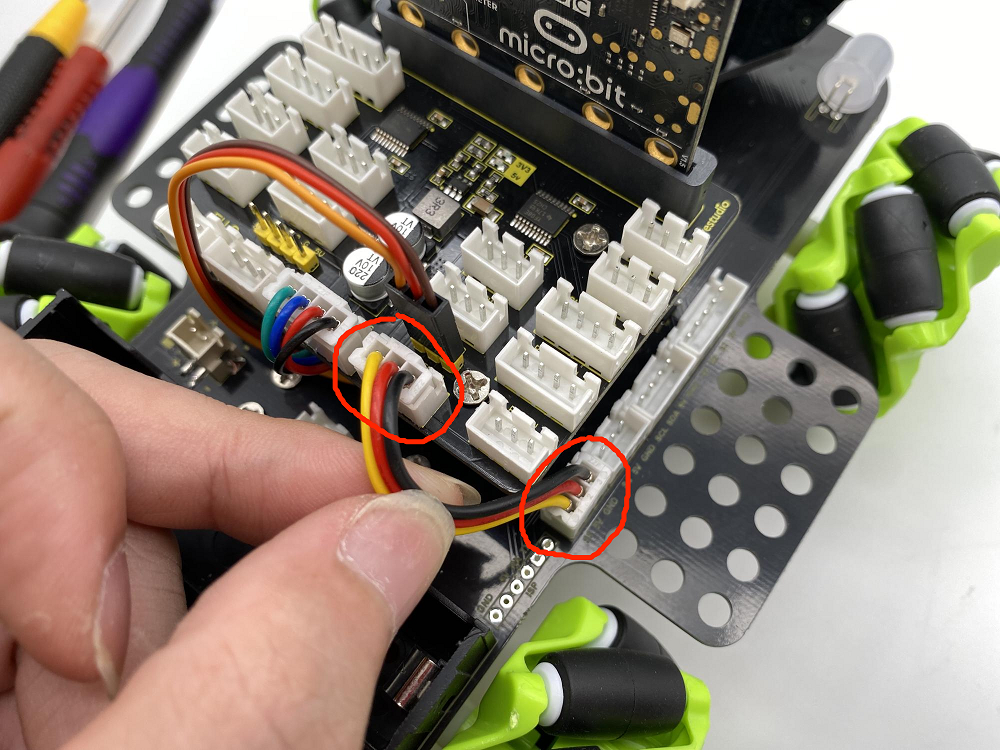
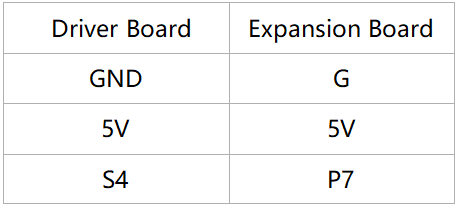
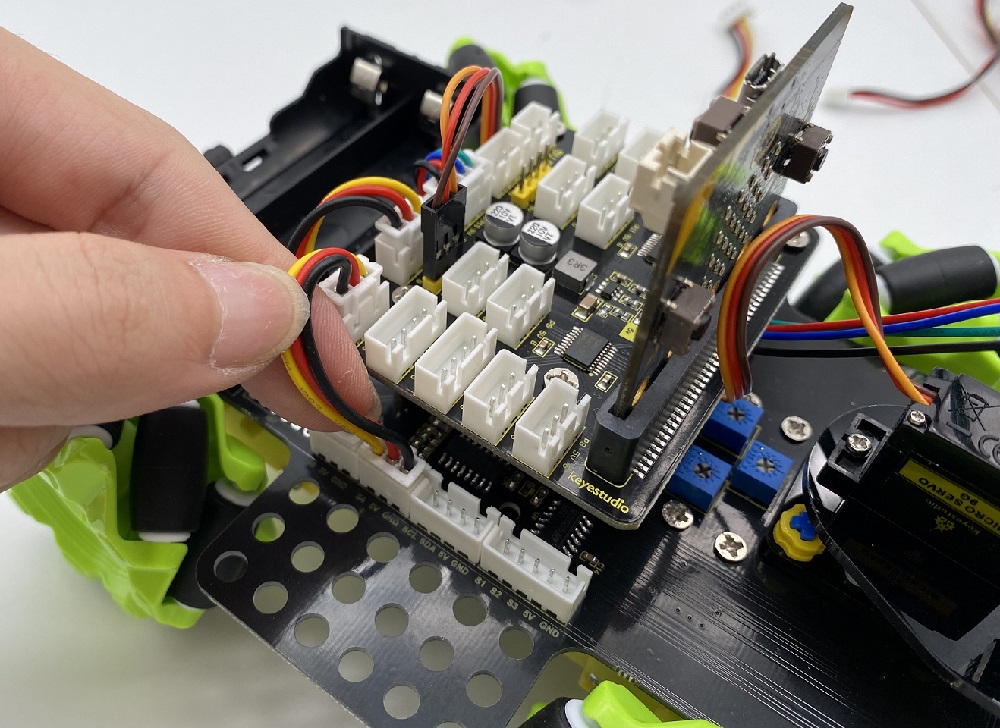
Die Verkabelung des Servos:
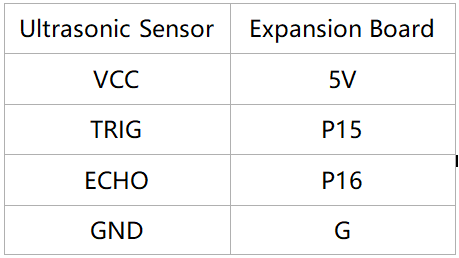
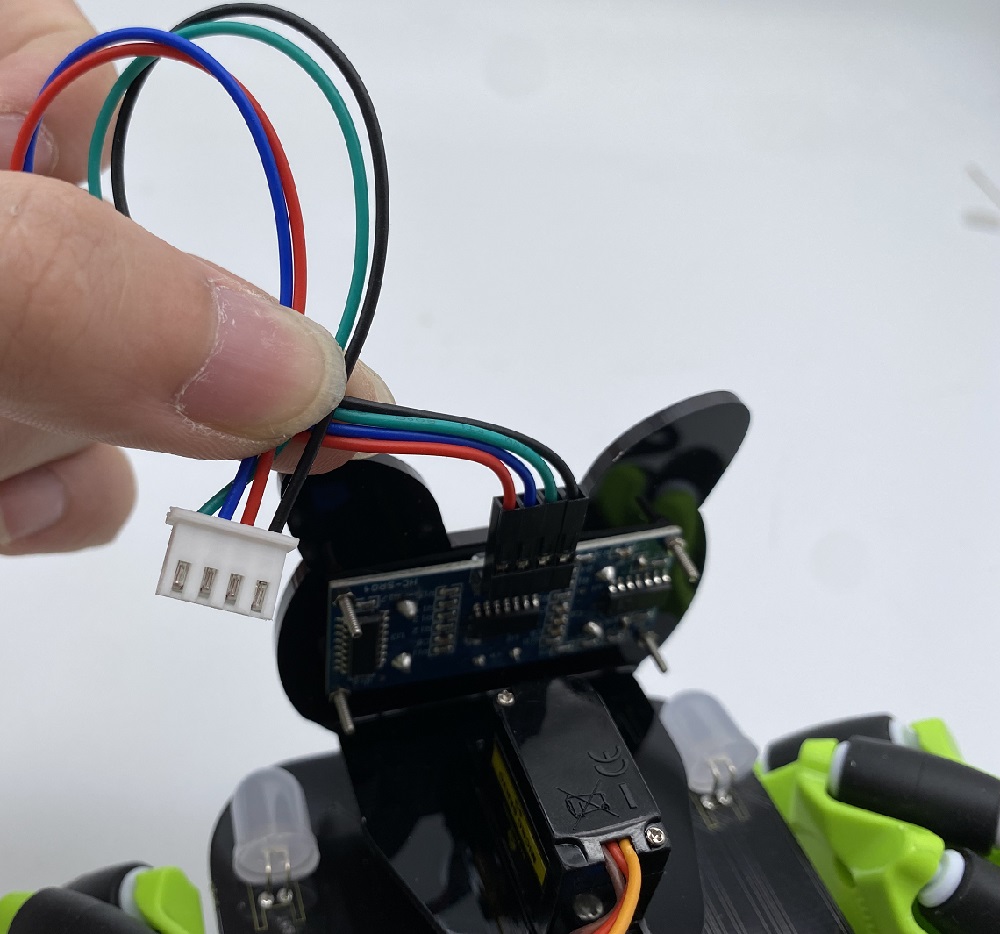
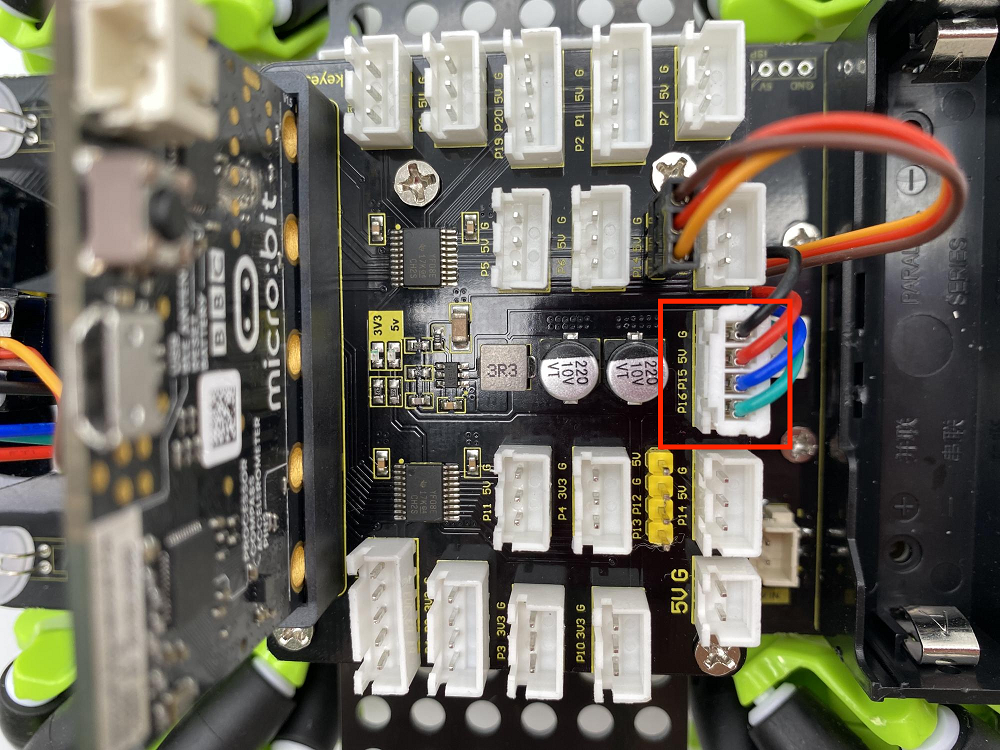
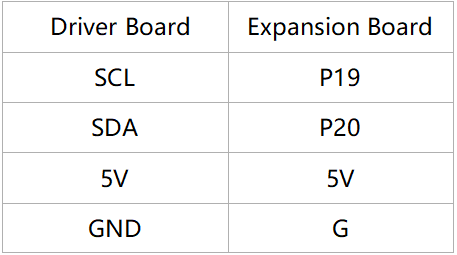
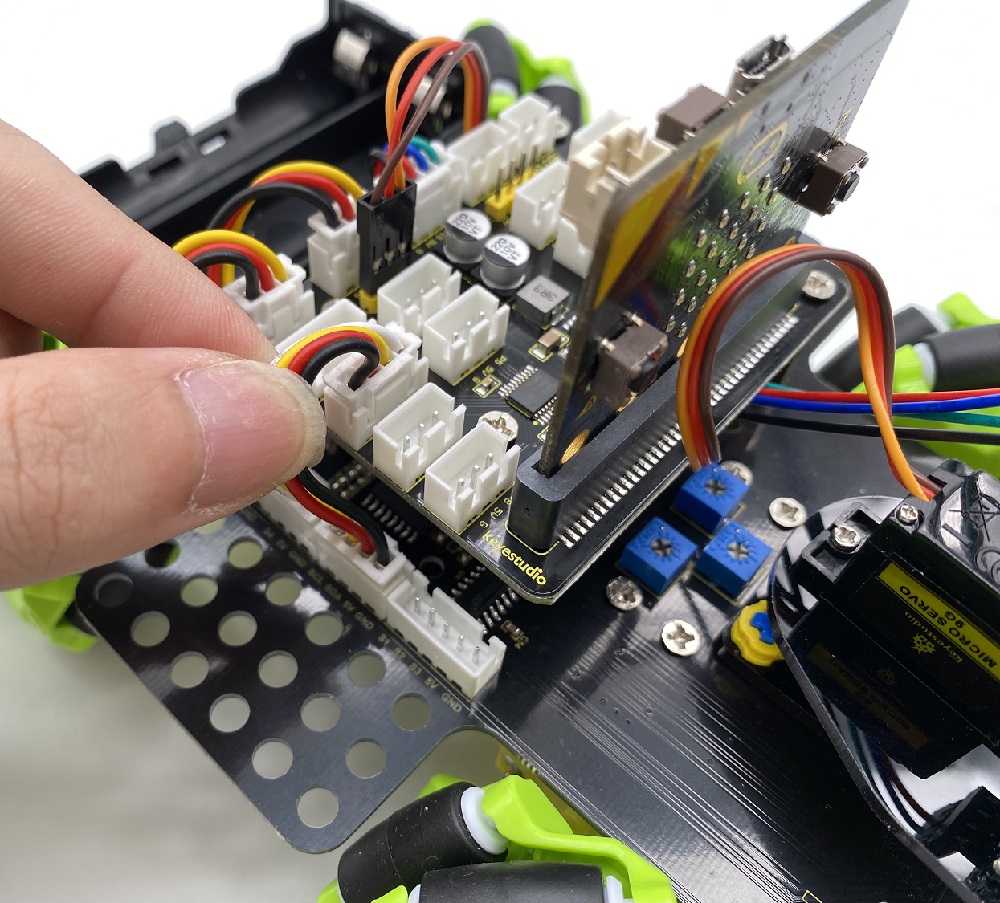
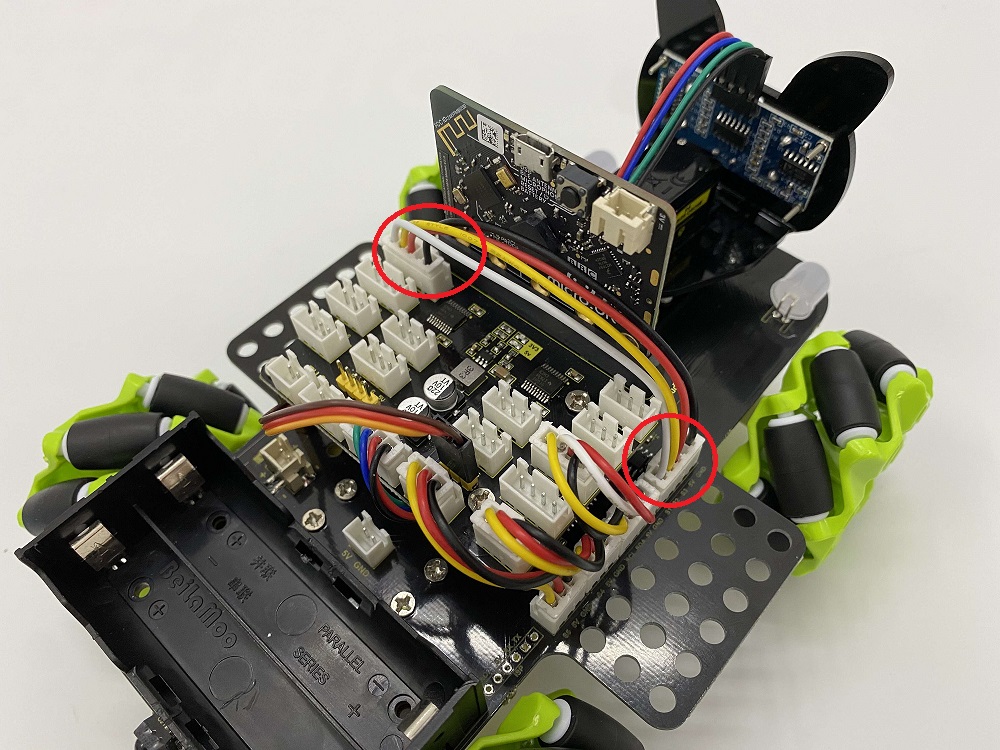
Die Verkabelung des Ultraschallsensors:
Die Verkabelung des IR-Empfängermoduls:
Die Verkabelung der RGB-LED:
Die Verkabelung zur Steuerung des Motors und der Sieben-Farben-Leuchte:
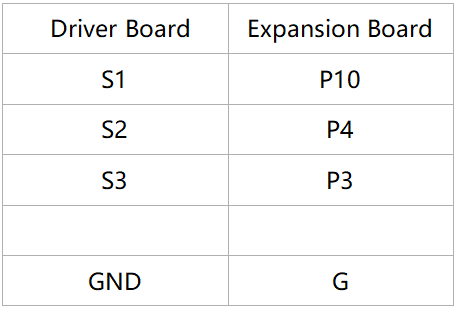
Die Verkabelung zur Steuerung des 3-Kanal Linienverfolgungssensors:
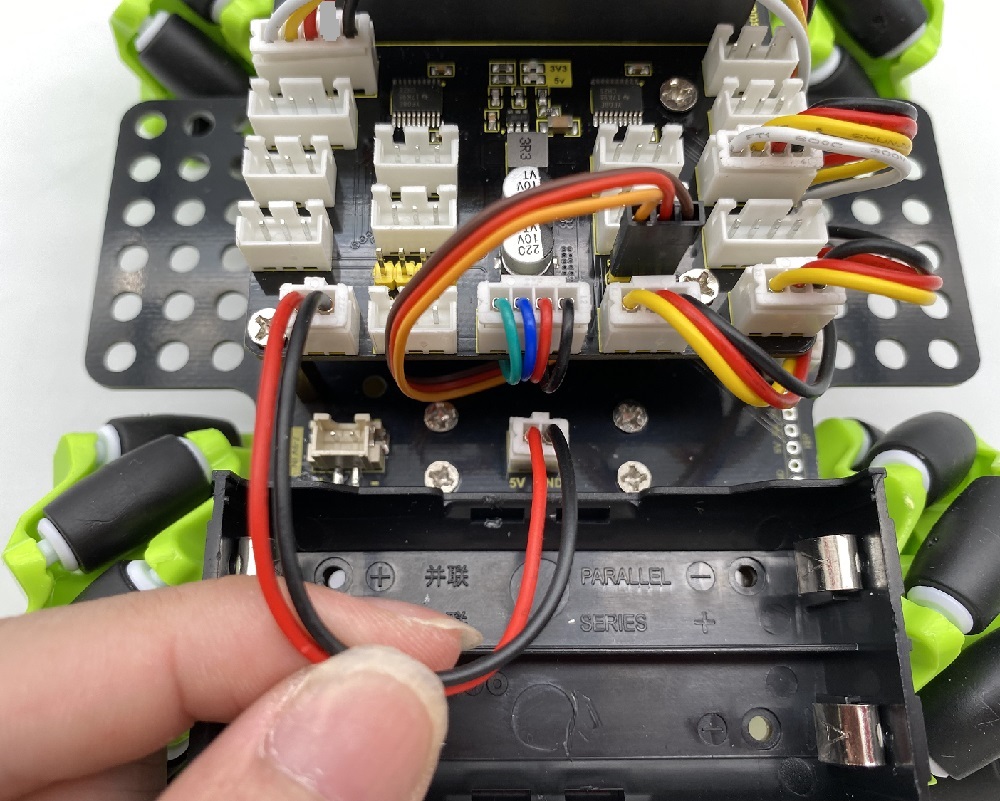
Die Verkabelung der Stromversorgung:
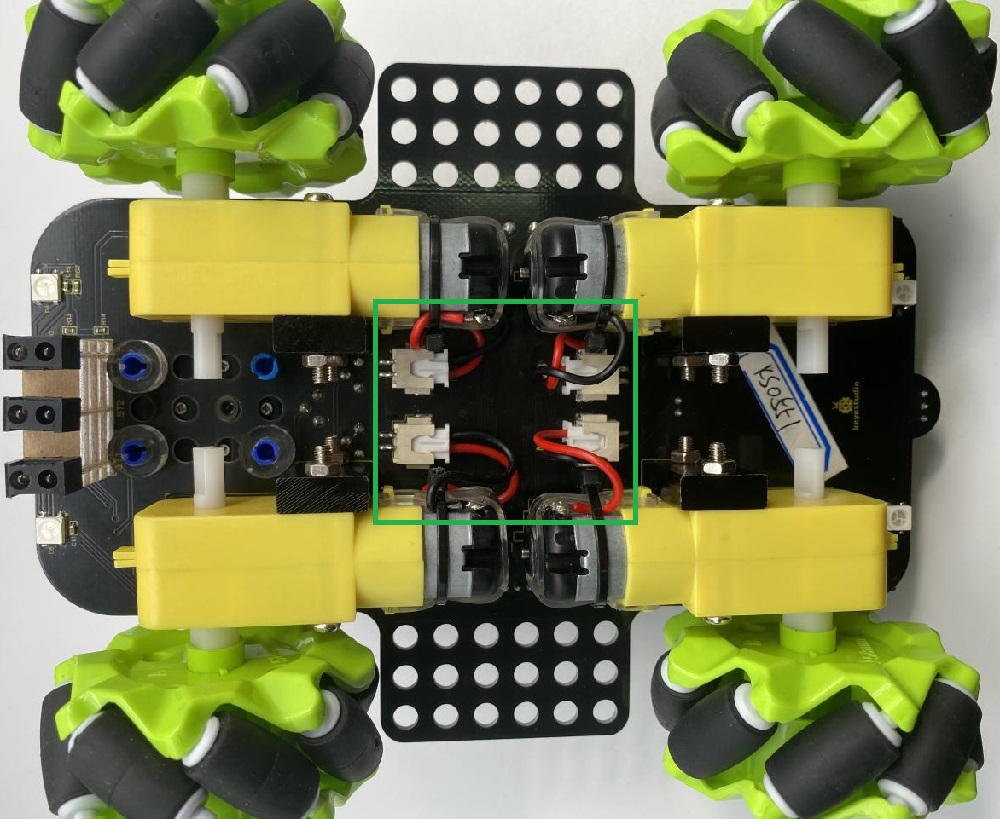
Die entsprechende Motor-Schnittstelle:
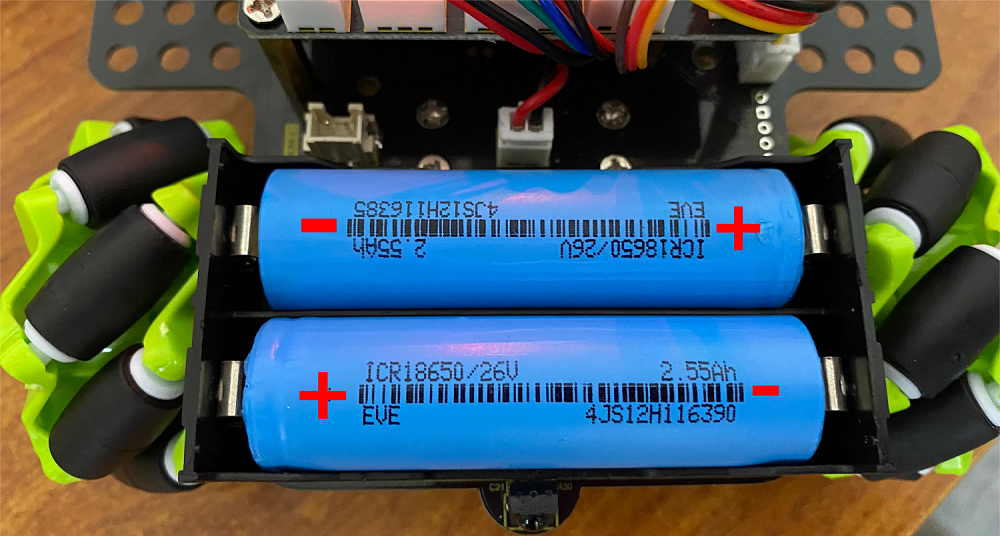
Die Installation der Batterie: