La instalación del Keyestudio 4WD Mecanum Robot Car V2.0
Paso 1
Componentes necesarios:
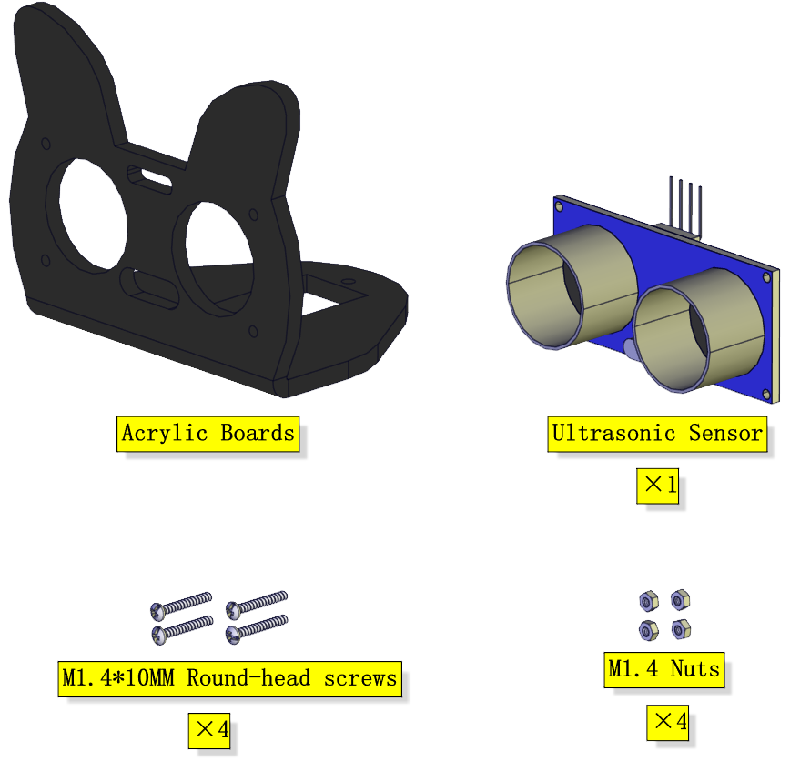
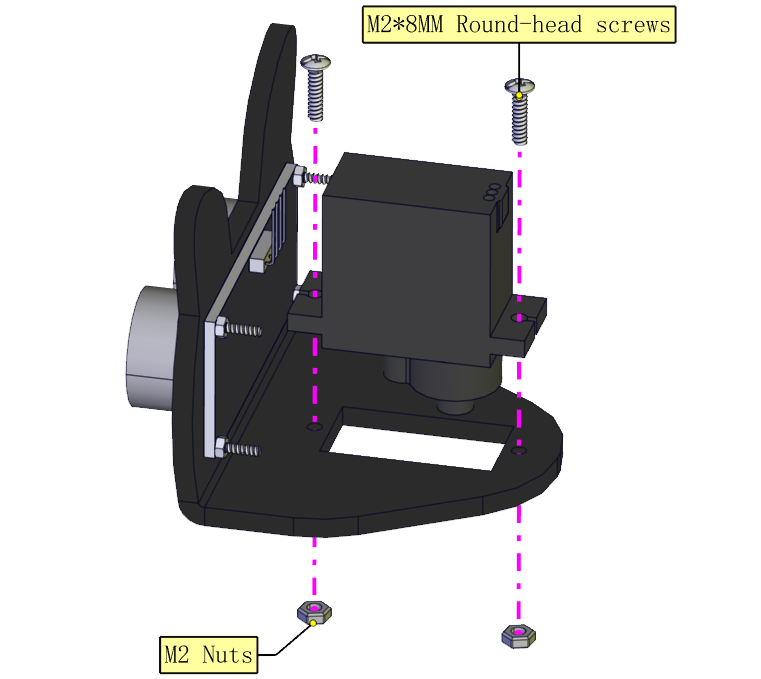
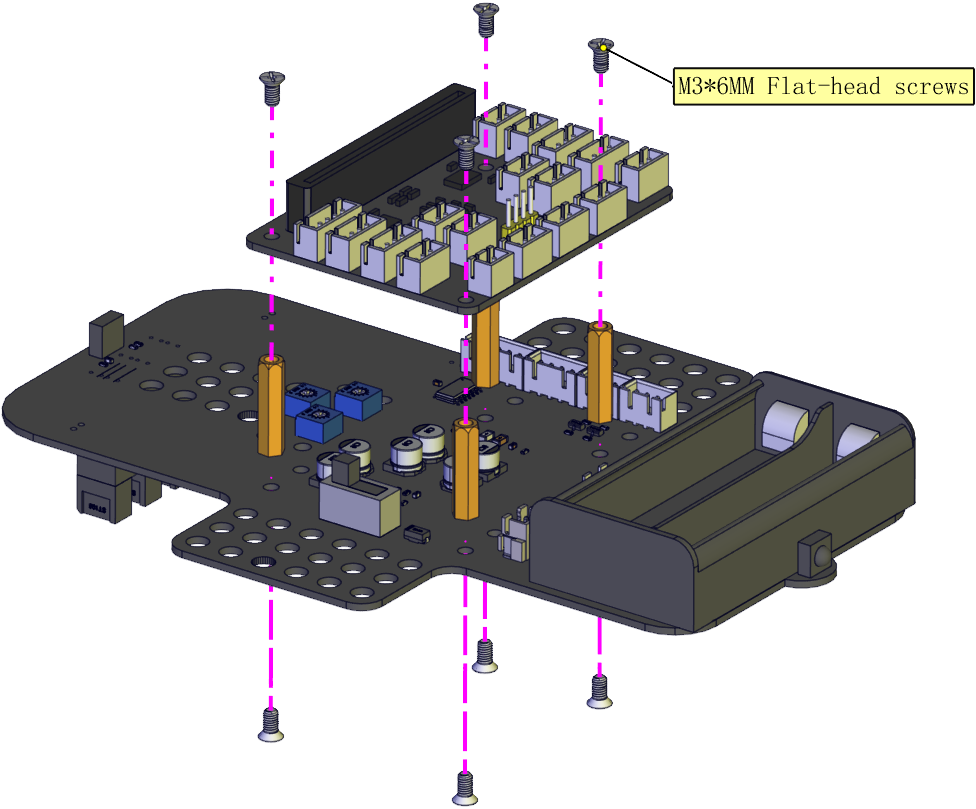
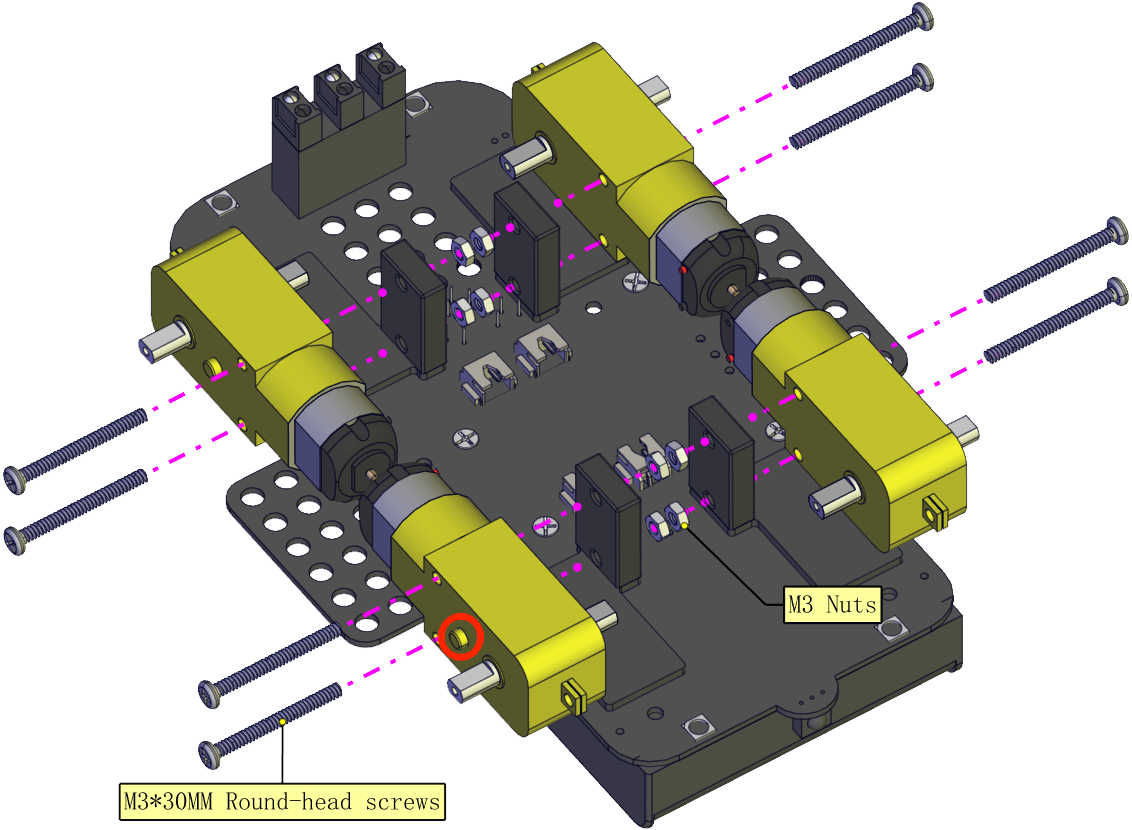
Diagrama de instalación:
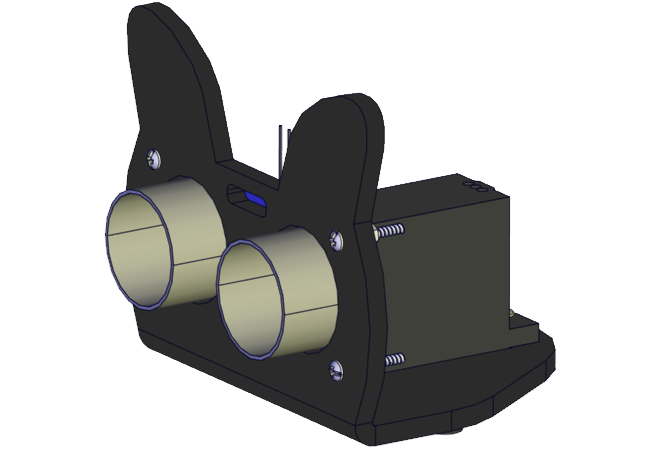
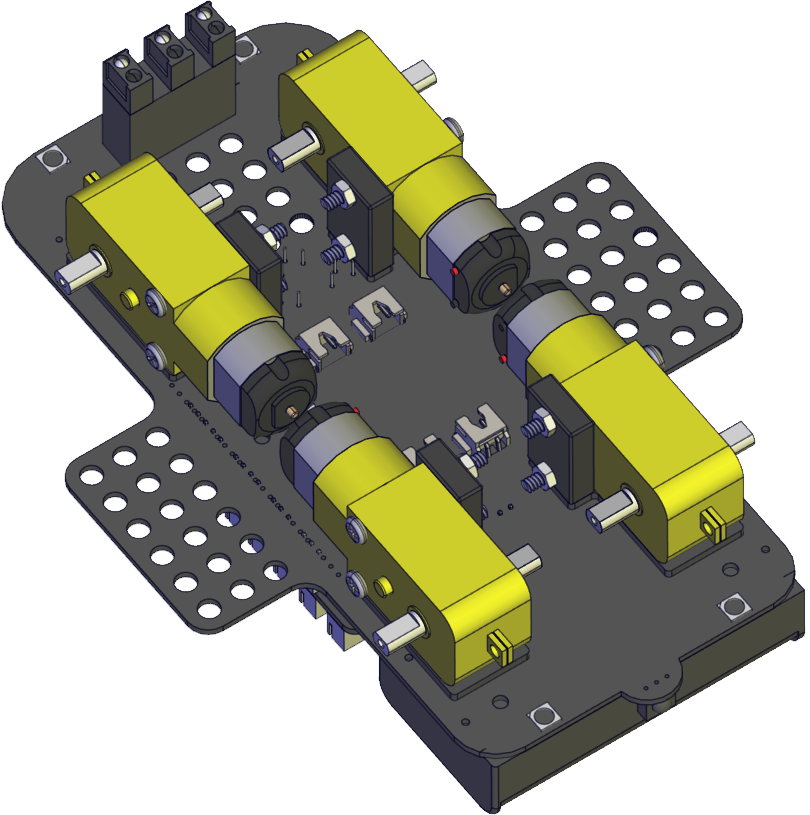
Prototipo:
Paso 2
Componentes necesarios:
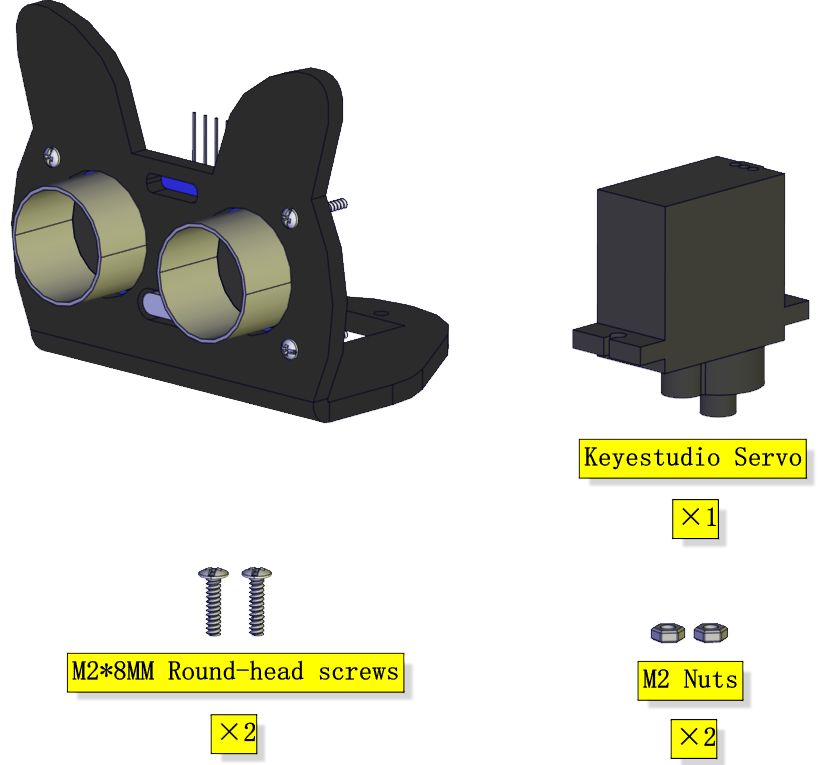
Diagrama de instalación:
Prototipo:
Paso 3
Componentes necesarios:
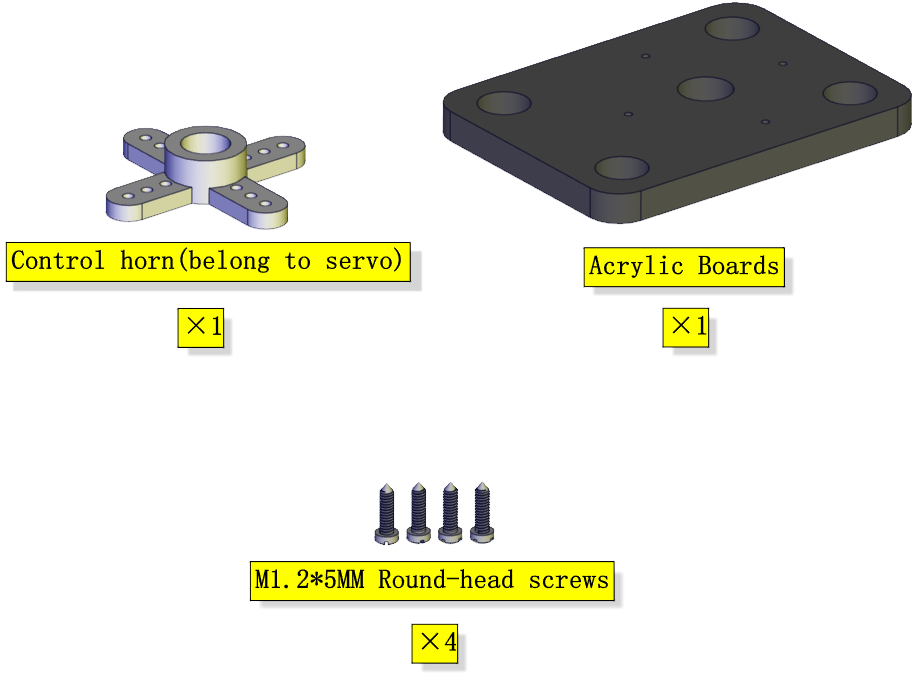
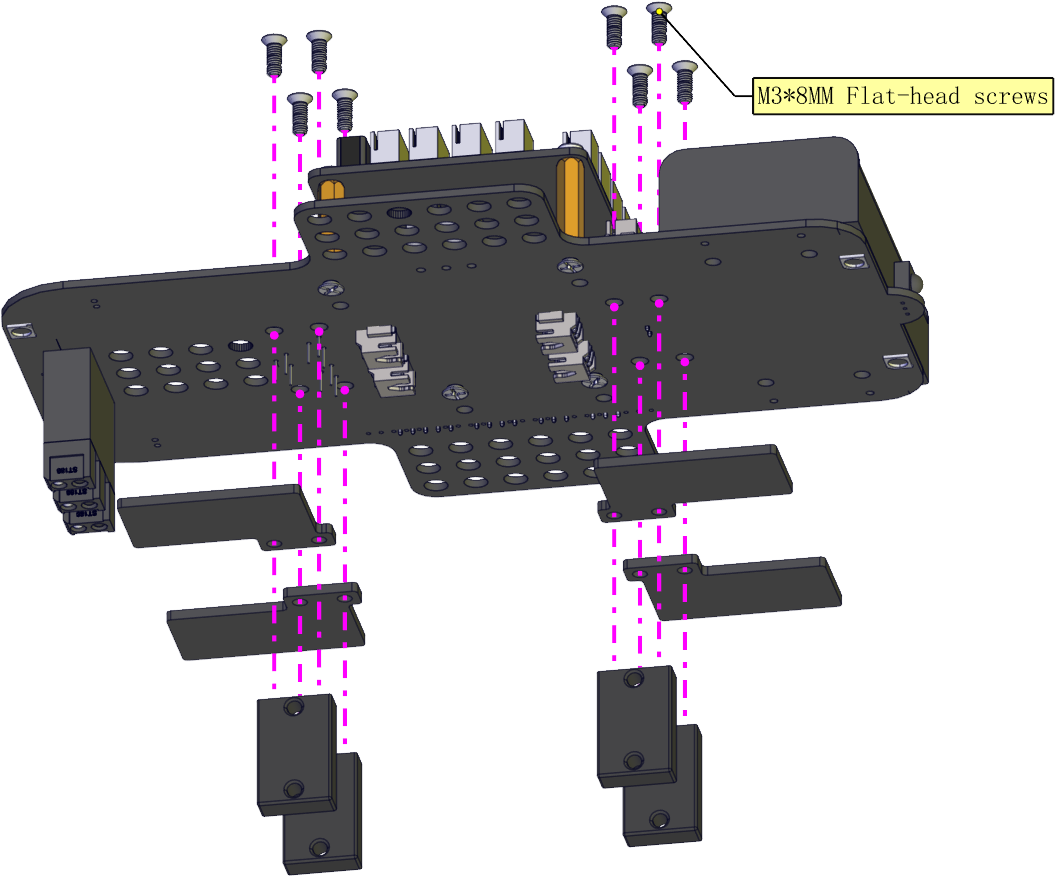
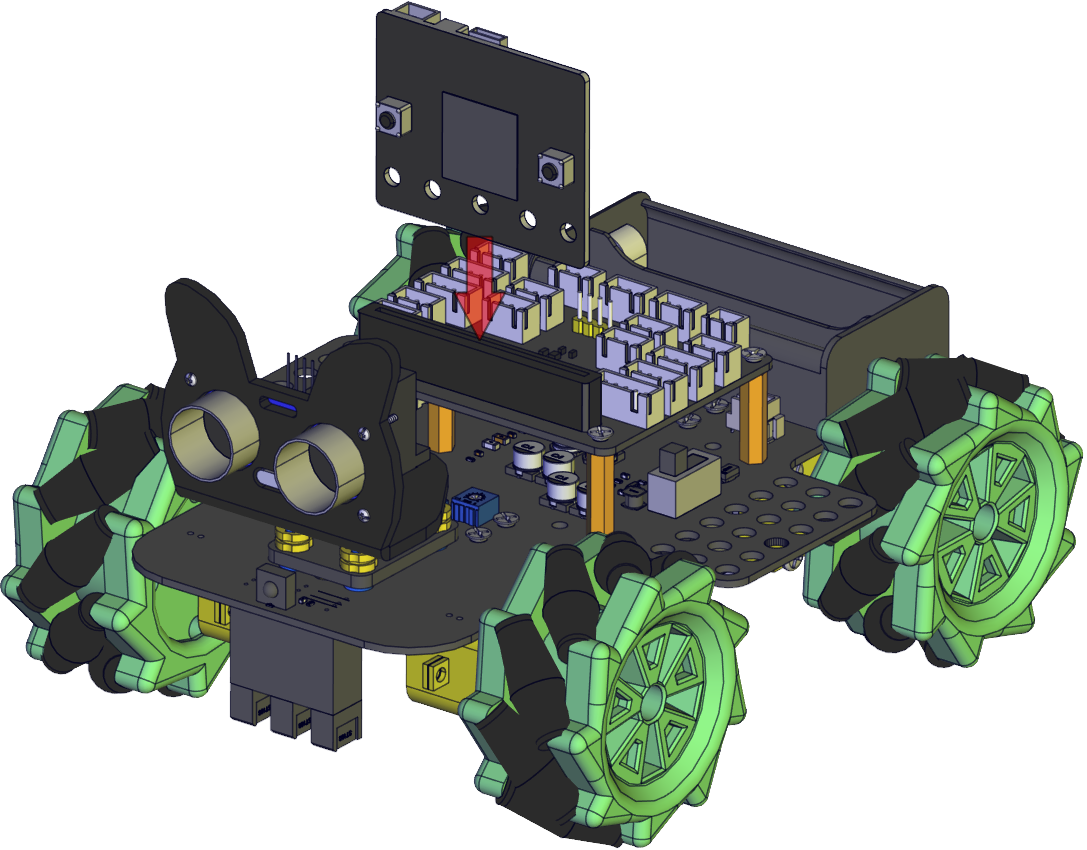
Diagrama de instalación:
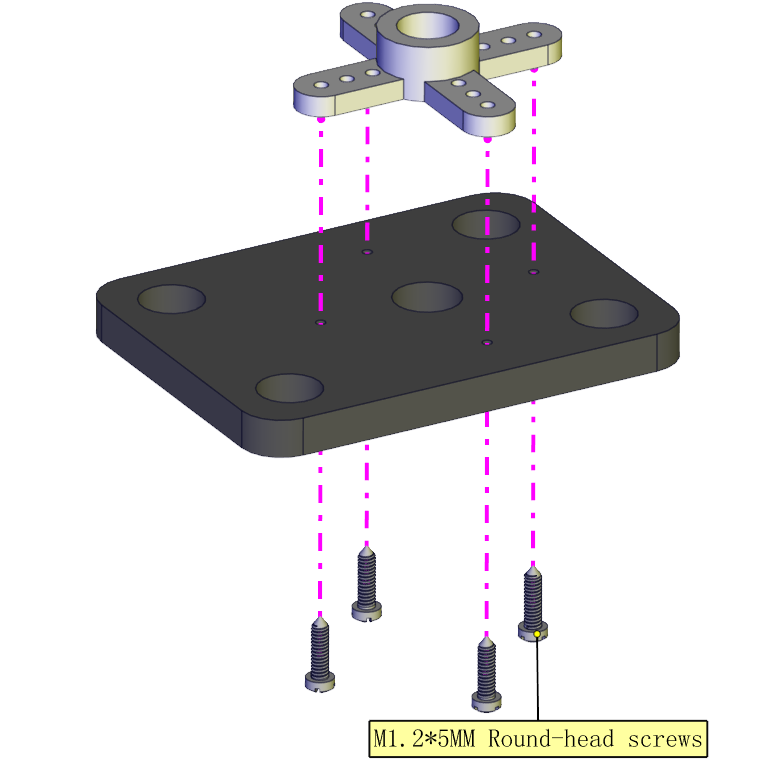
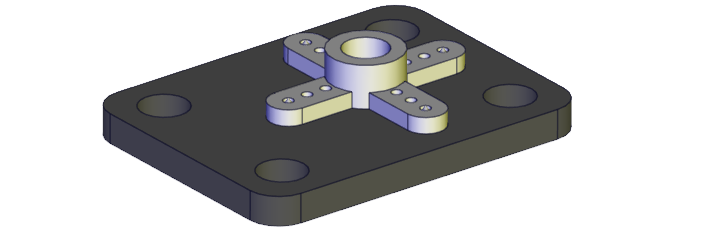
Prototipo:
Paso 4
(ajuste primero el ángulo del servo)
Ajuste el ángulo del servo a 90 grados.
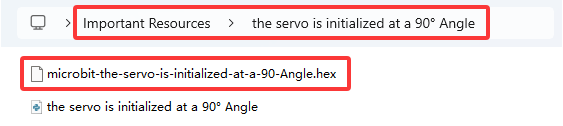
Método 1: código MakeCode
⚠️Nota especial: Antes de escribir el código y cargarlo, debe comprender el IDE MakeCode y añadir archivos de biblioteca. Por favor visite el enlace: Get Started with makecode

El código MakeCode anterior se proporciona en los materiales. Abra el código de ajuste del servo y grábelo en la placa microbit del 4WD Mecanum Robot Car V2.0, y enciéndalo mediante cable micro USB o fuente de alimentación externa (ponga el DIP switch en ON). Eso es todo. El código está en la posición indicada en la figura:
Método 2:código Python
⚠️Nota especial: Antes de escribir el código y cargarlo, debe instalar Mu IDE y añadir archivos de biblioteca. Por favor visite el enlace: Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
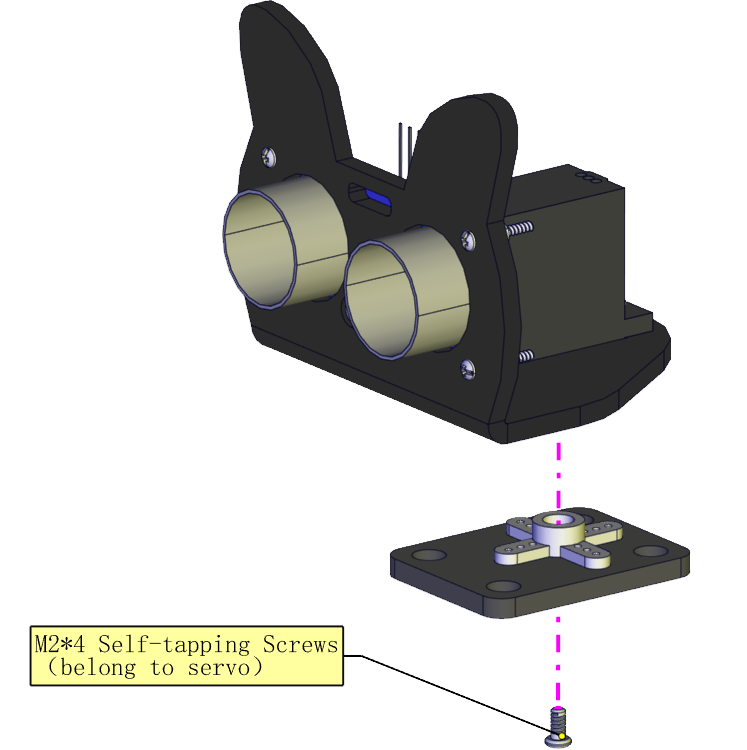
Componentes necesarios:
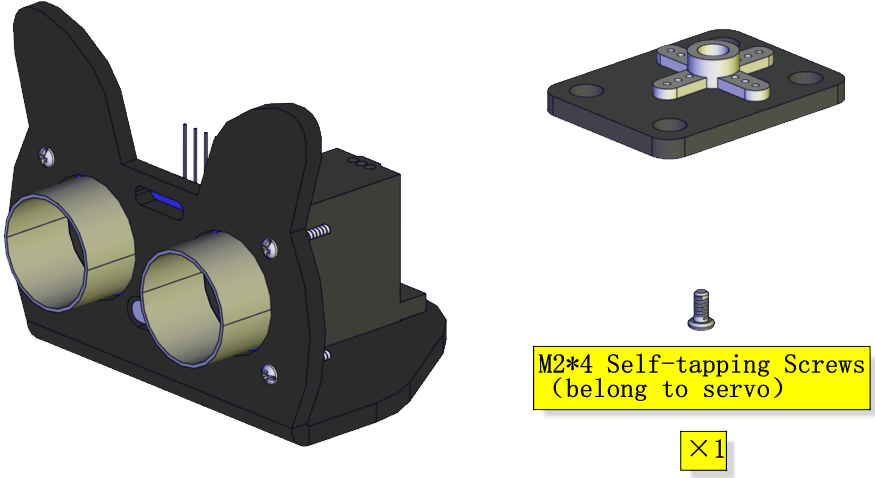
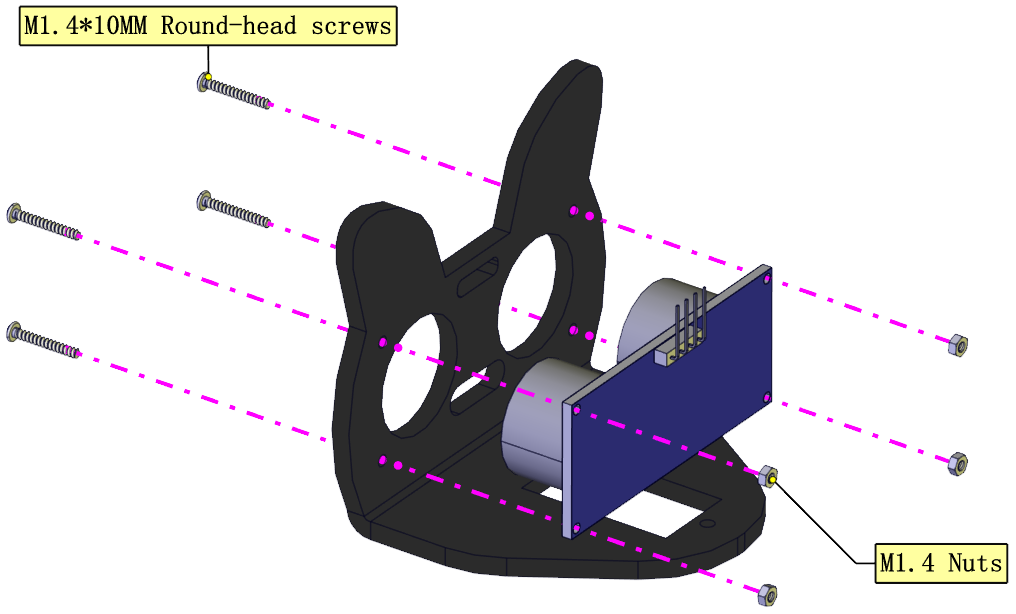
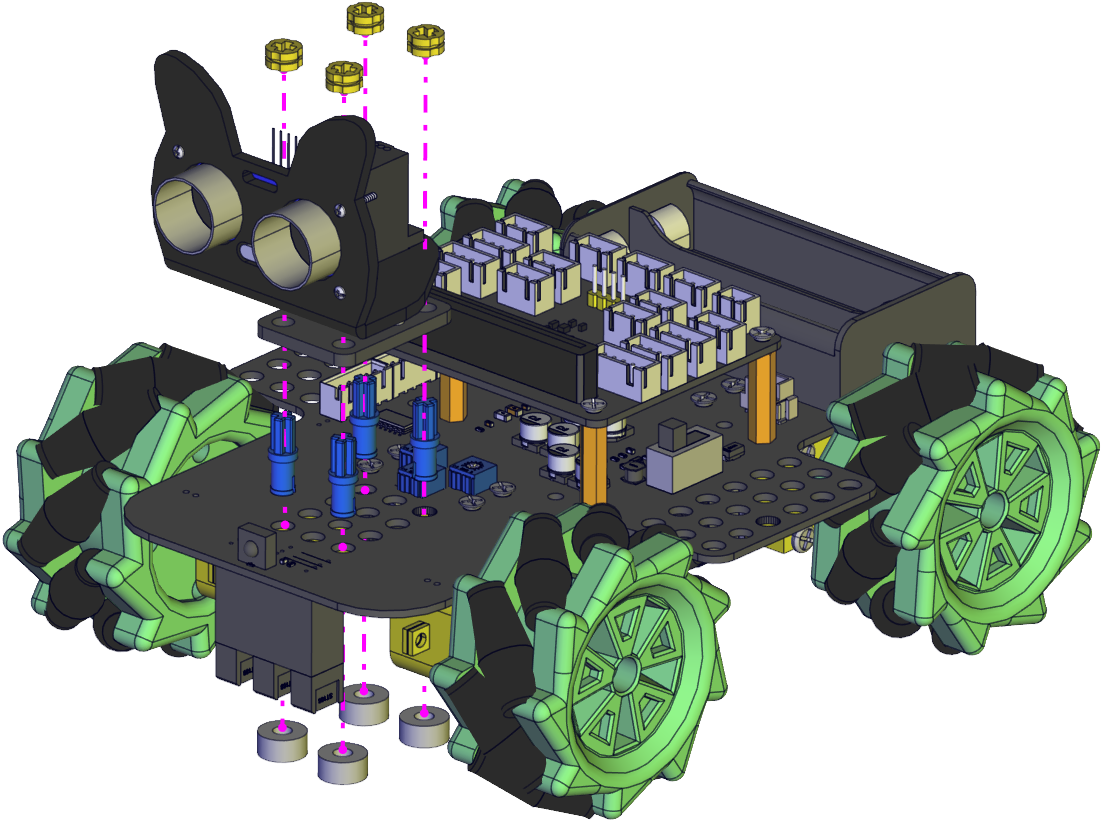
Diagrama de instalación: (preste atención a la dirección de instalación)
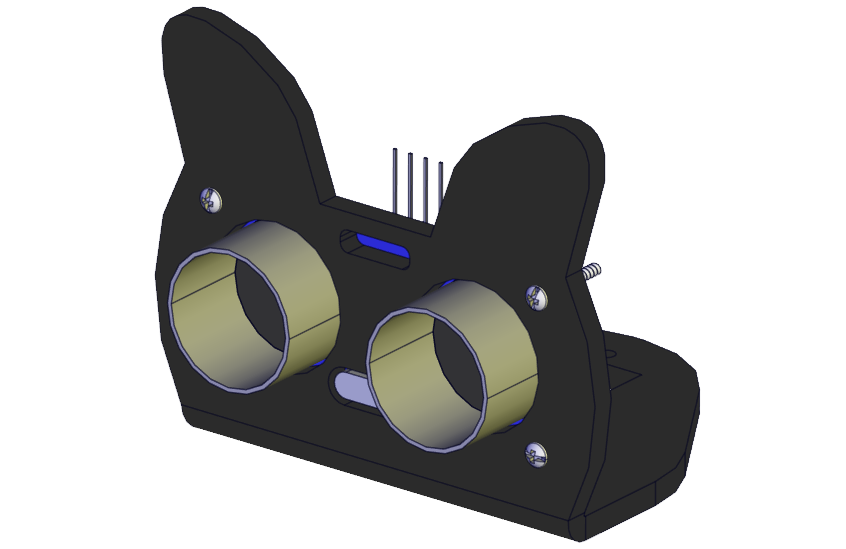
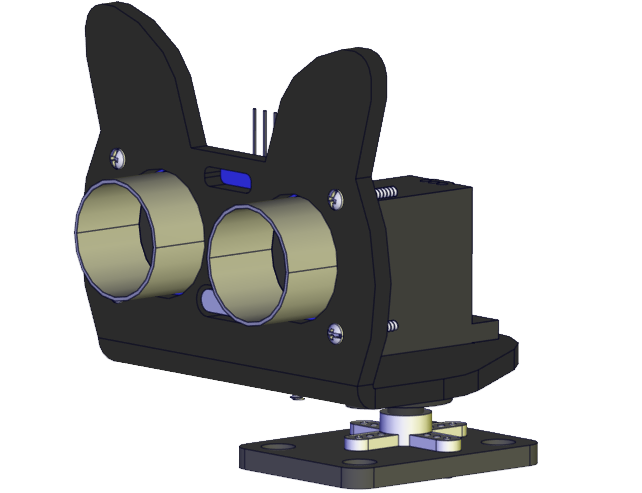
Prototipo:
Paso 5
Componentes necesarios:
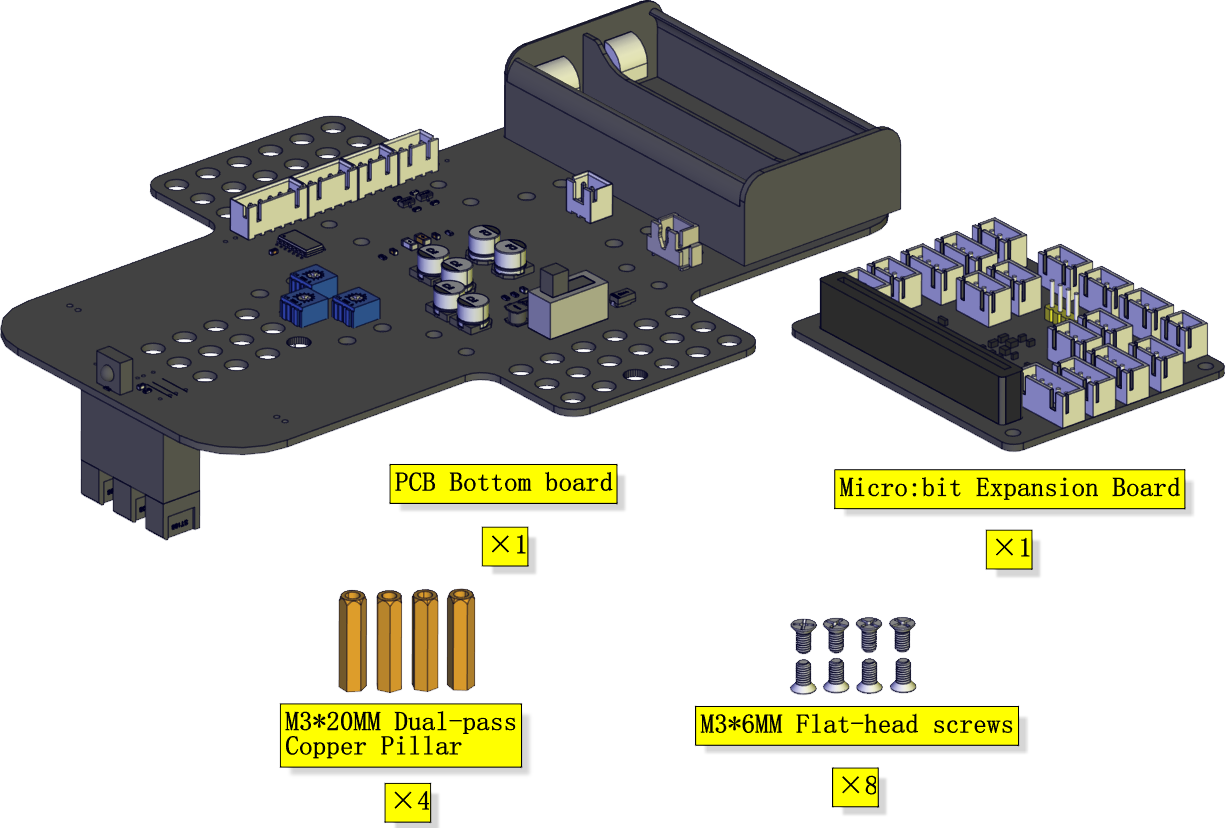
Diagrama de instalación:
Prototipo:
Paso 6
Componentes necesarios:
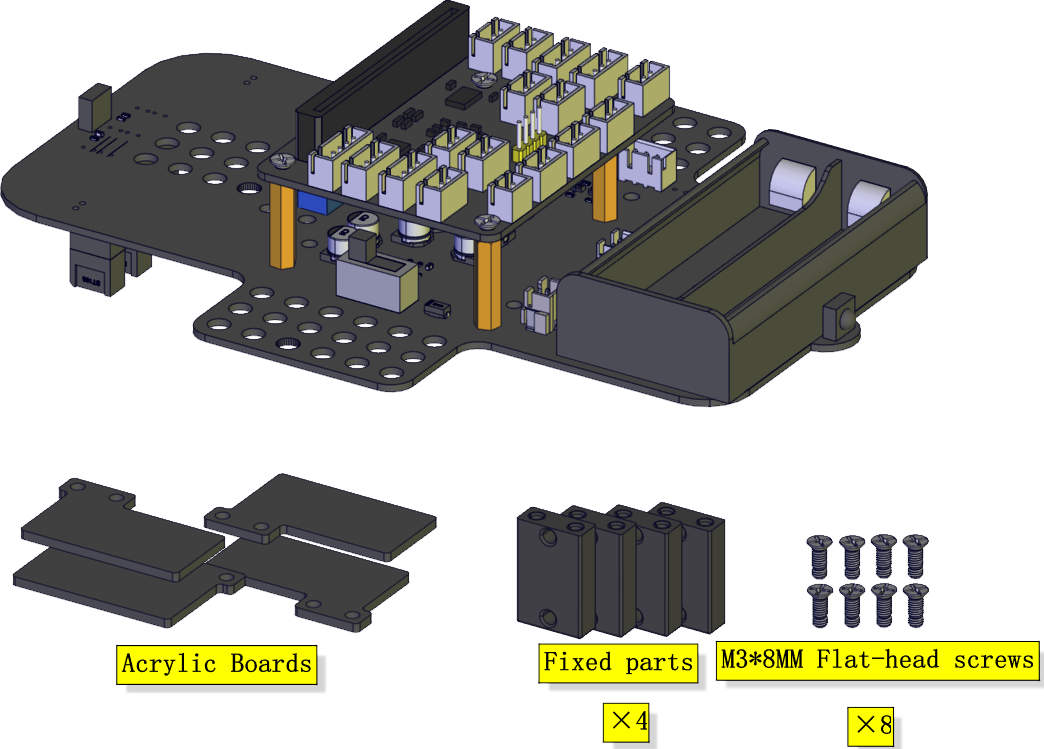
Diagrama de instalación:
Prototipo:
Paso 7
Componentes necesarios:
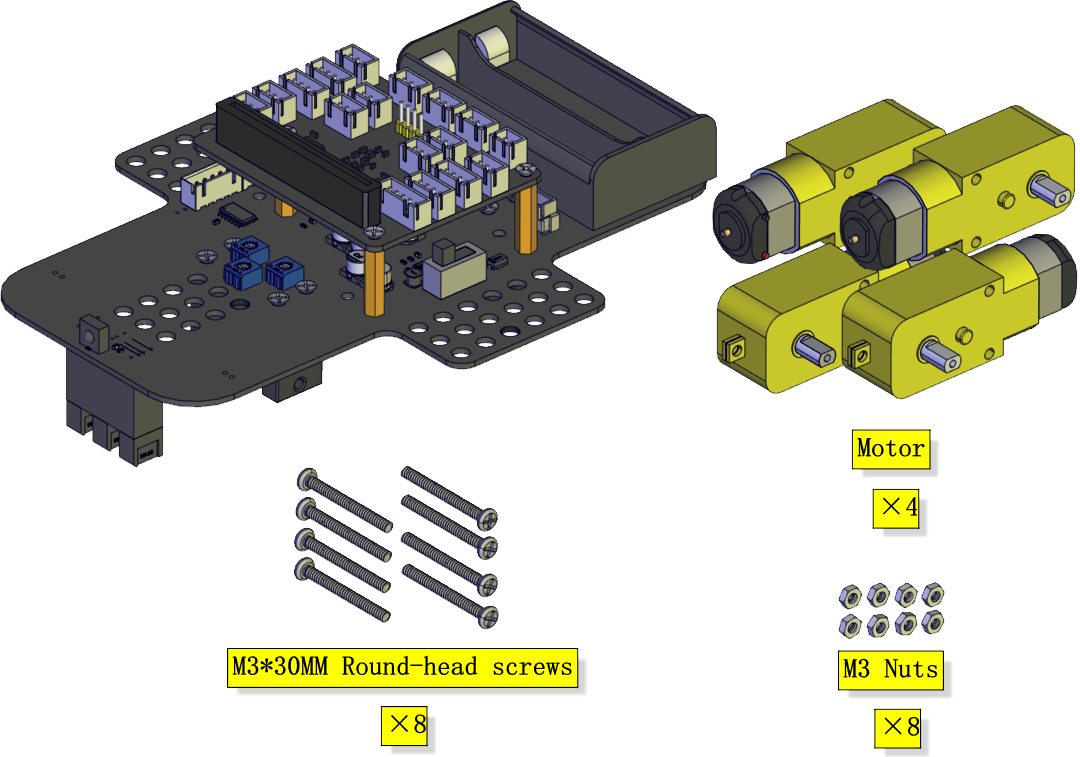
Diagrama de instalación: (preste atención a la dirección del motor)
Prototipo:
Paso 8
Componentes necesarios:
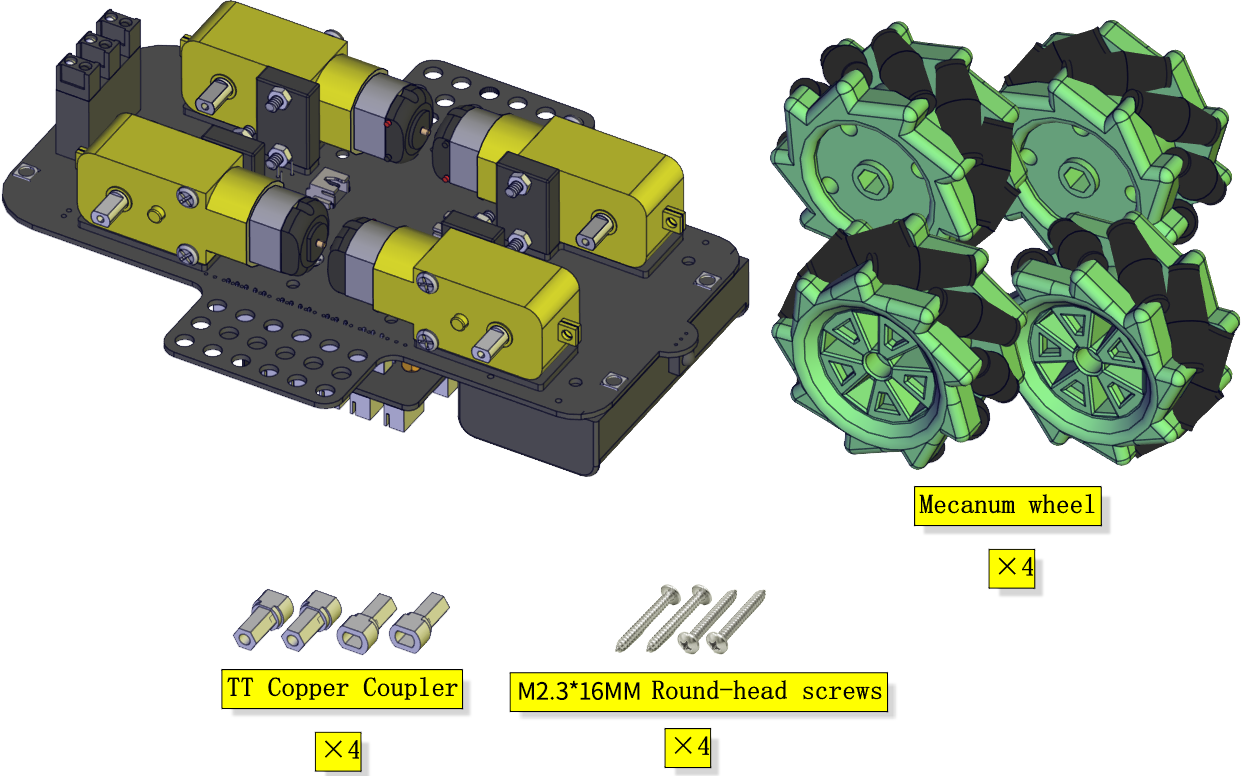
Diagrama de instalación: (preste atención a la dirección de instalación de la rueda mecanum)
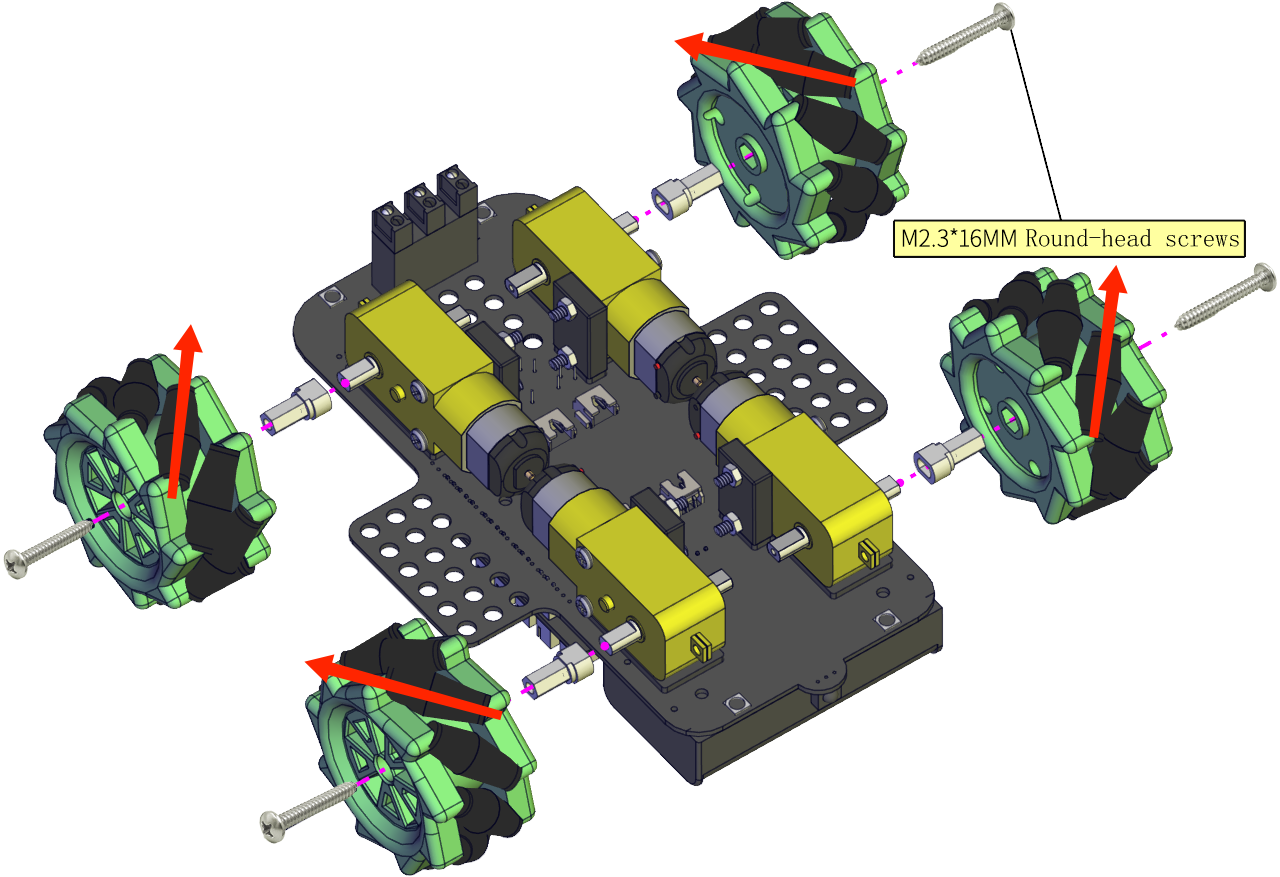
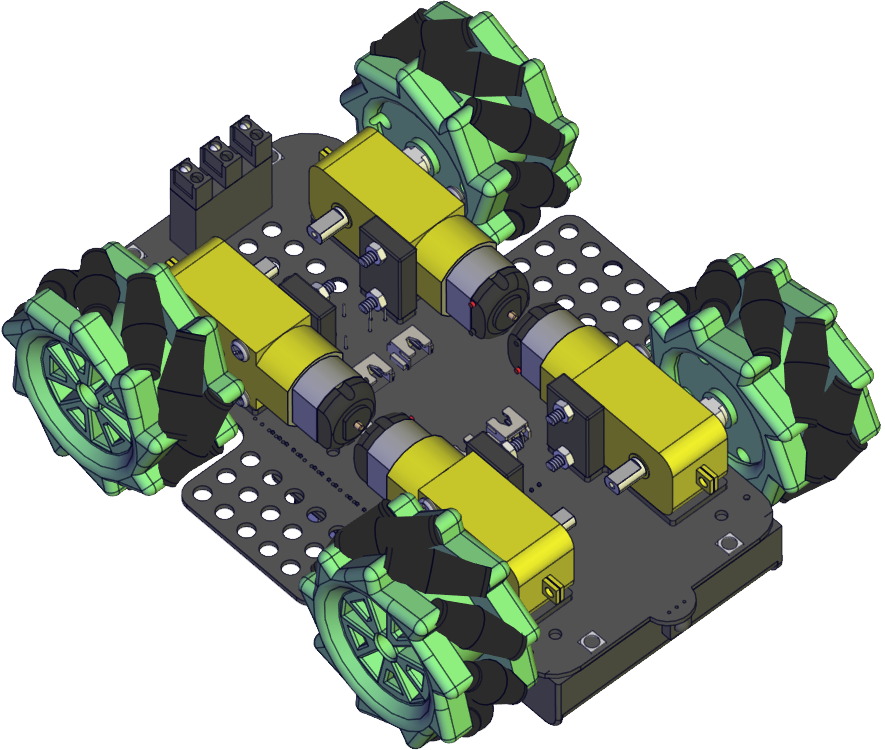
Prototipo:
Paso 9
Componentes necesarios:
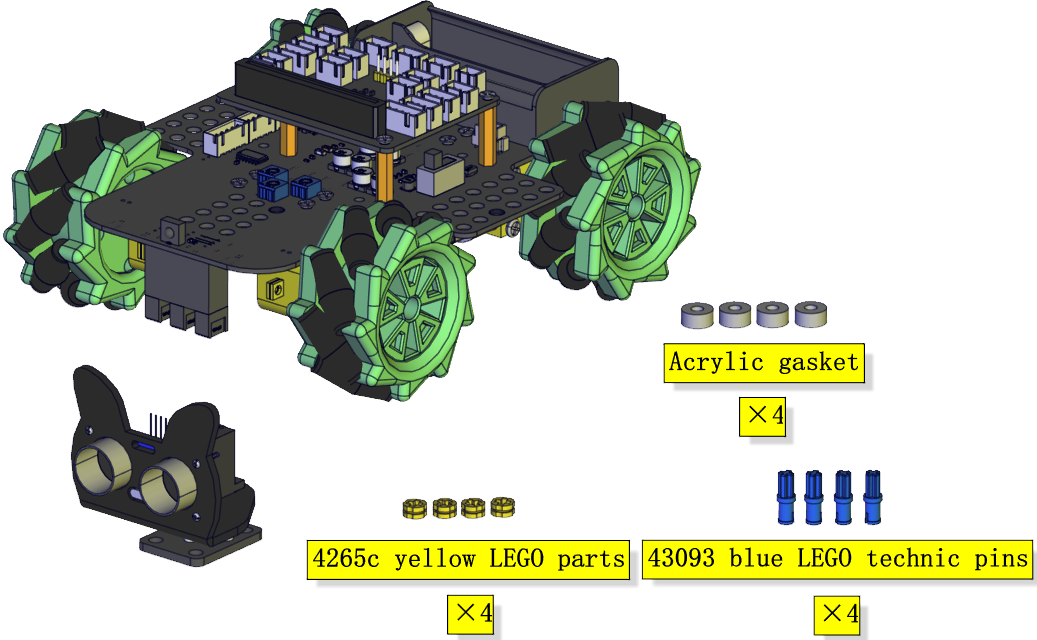
Diagrama de instalación:
Prototipo:
Paso 10
Componentes necesarios:
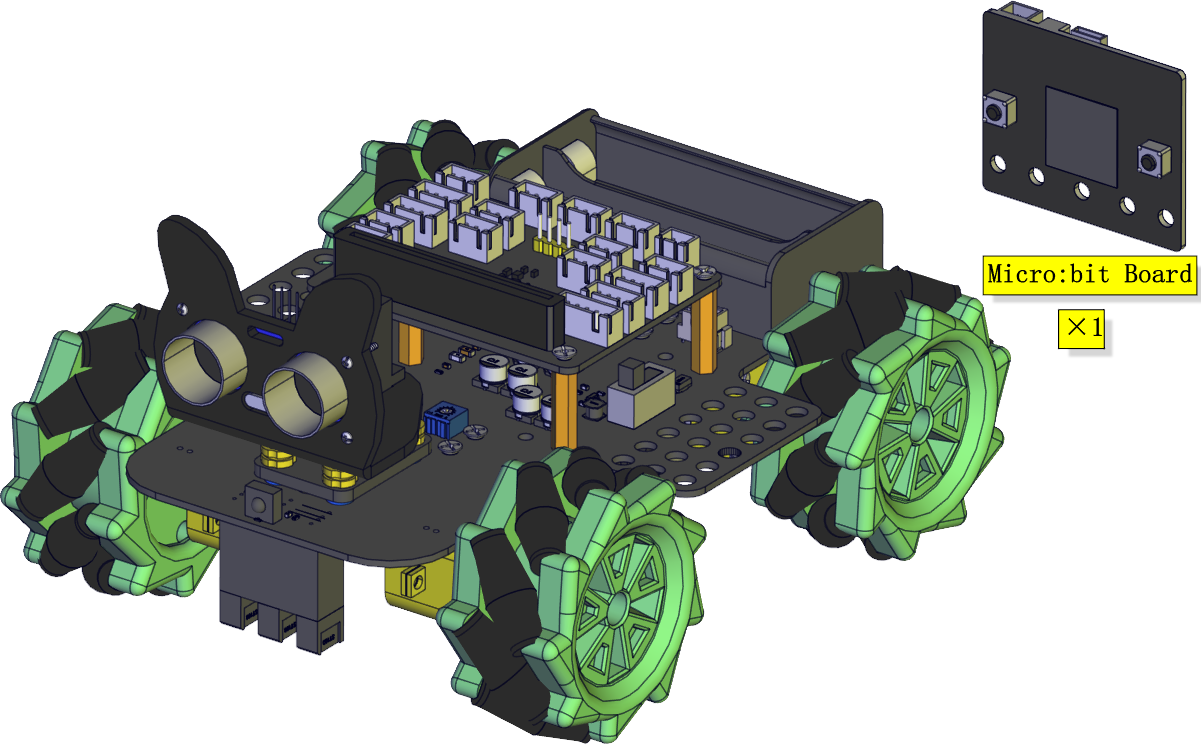
Diagrama de instalación:
Prototipo:
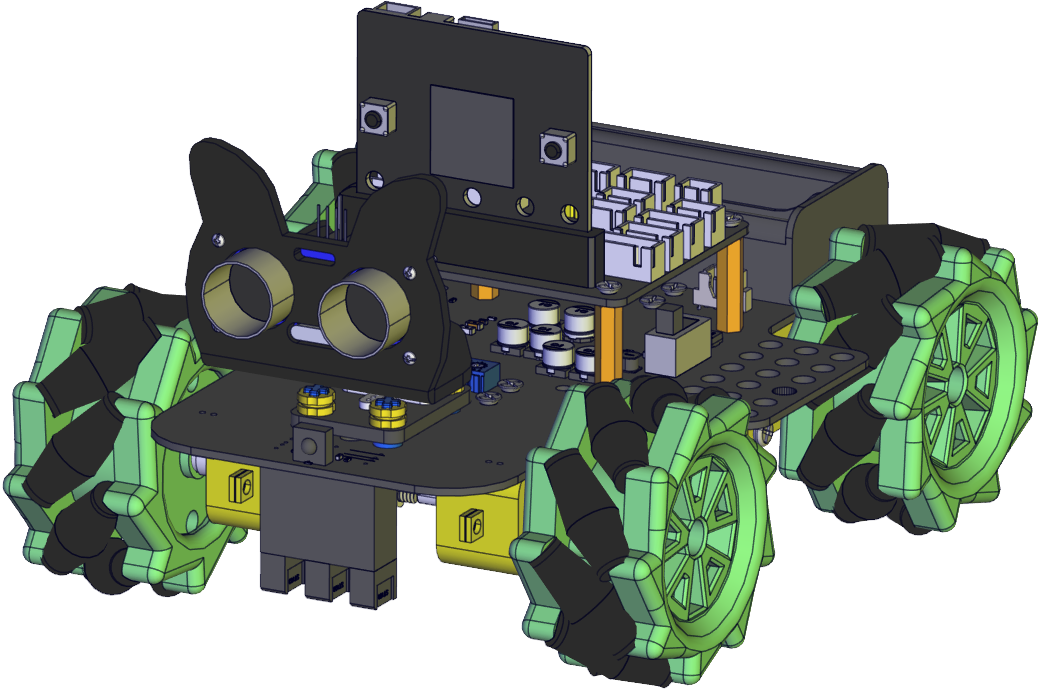
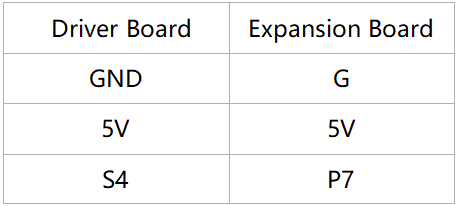
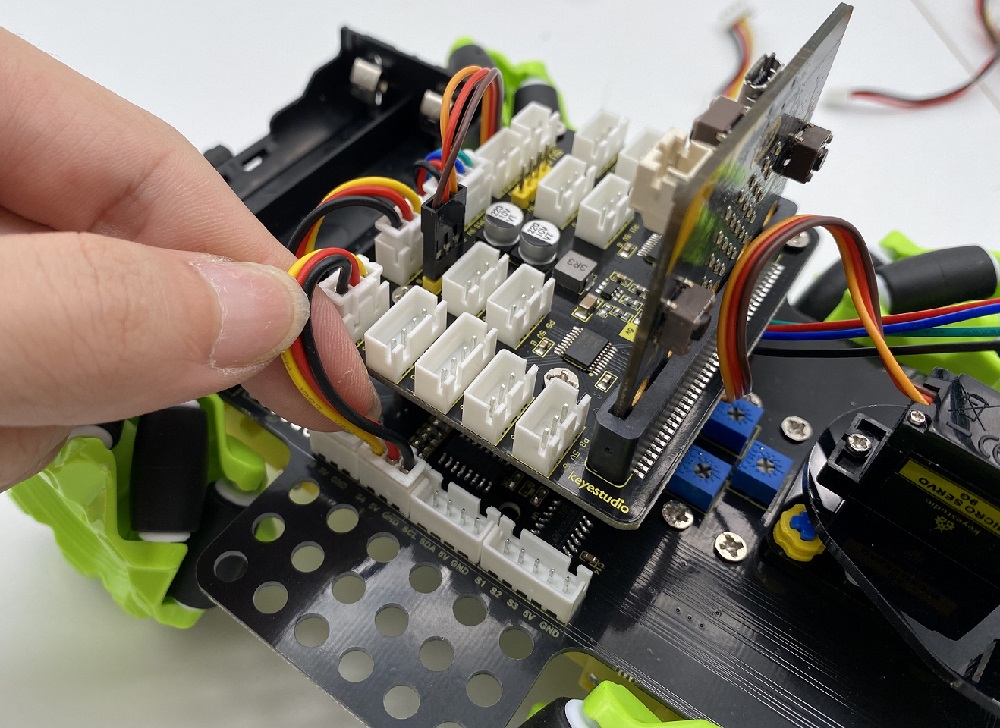
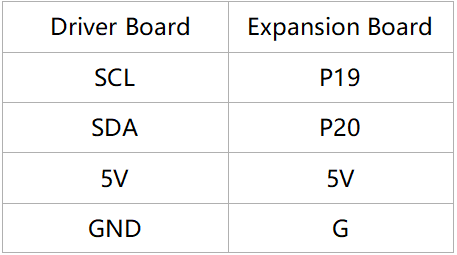
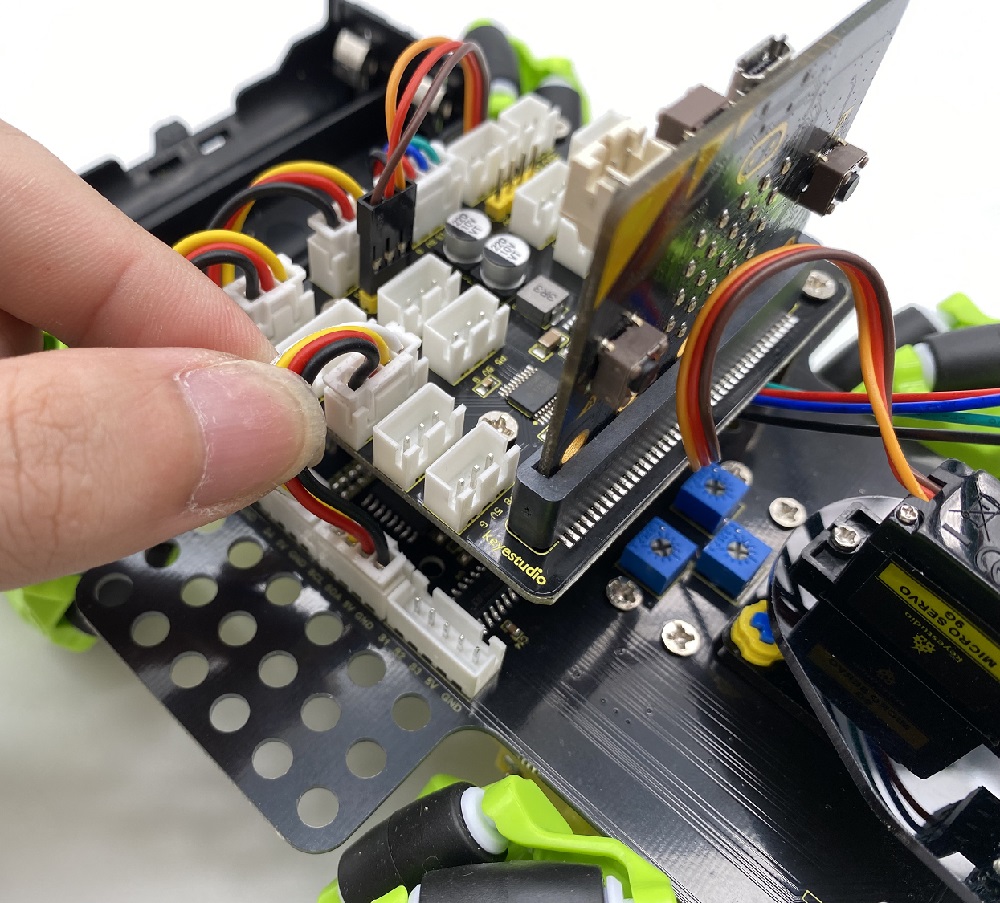
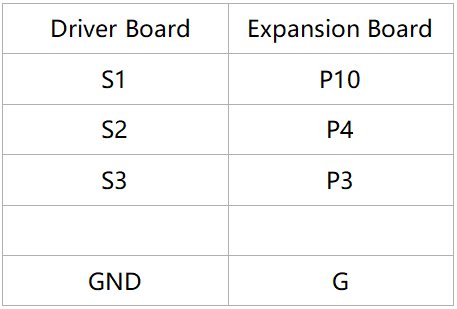
Diagrama de cableado
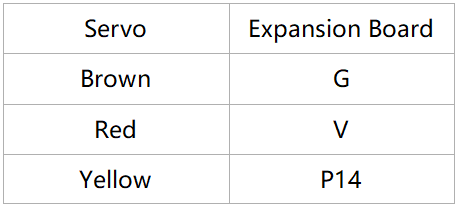
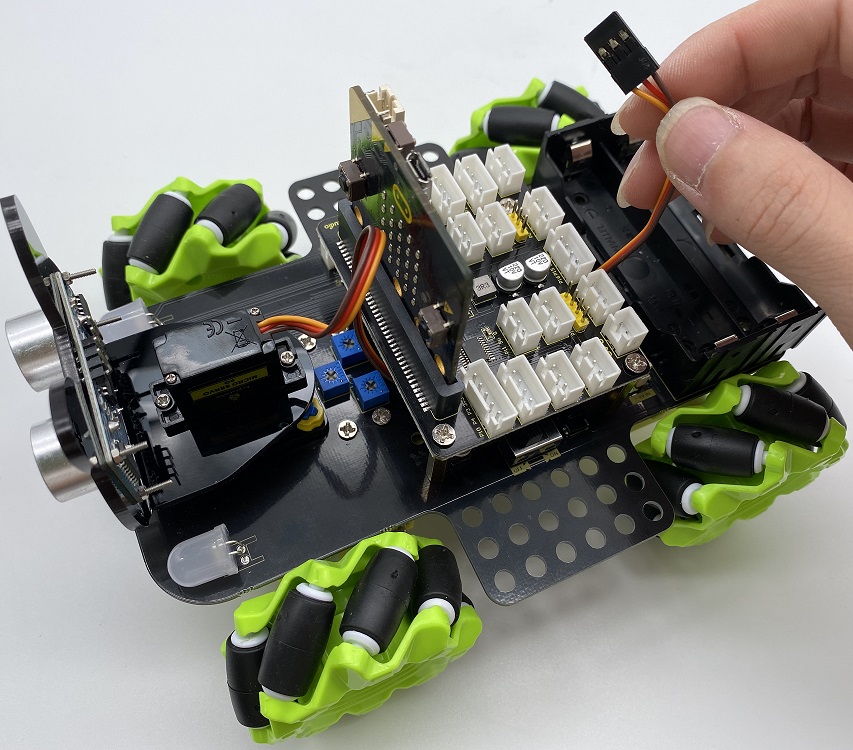
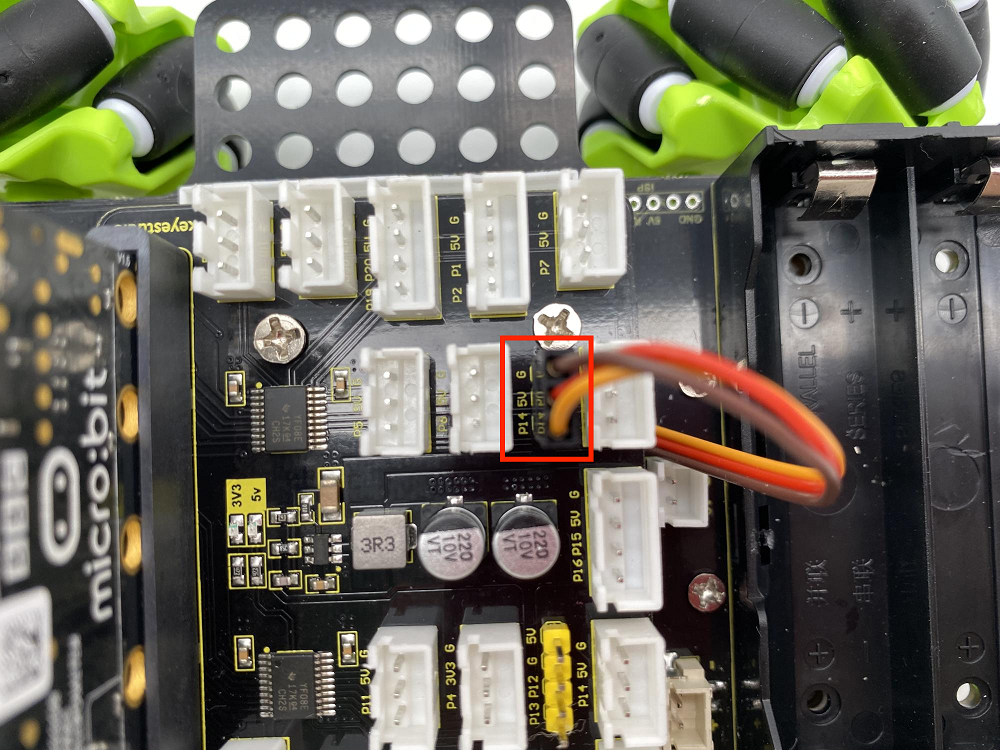
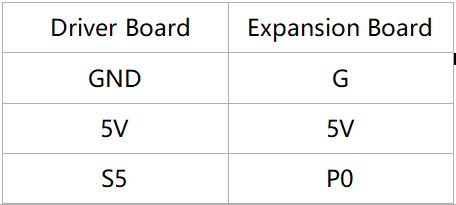
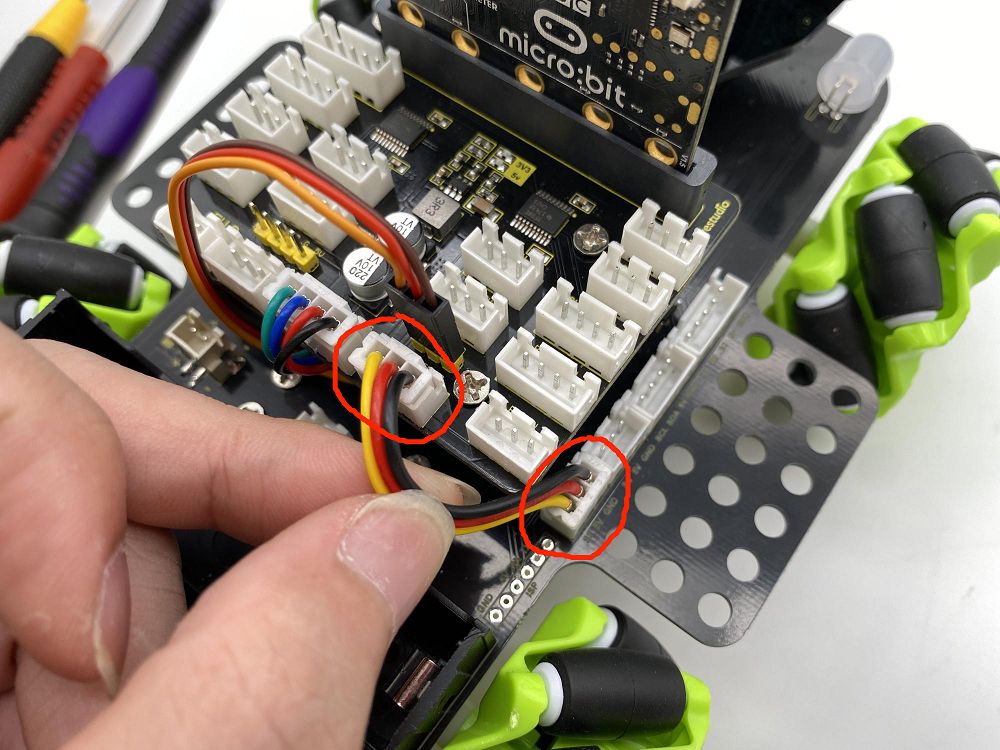
El cableado del servo:
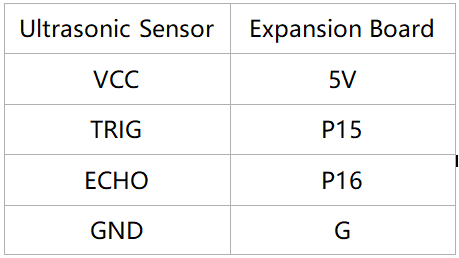
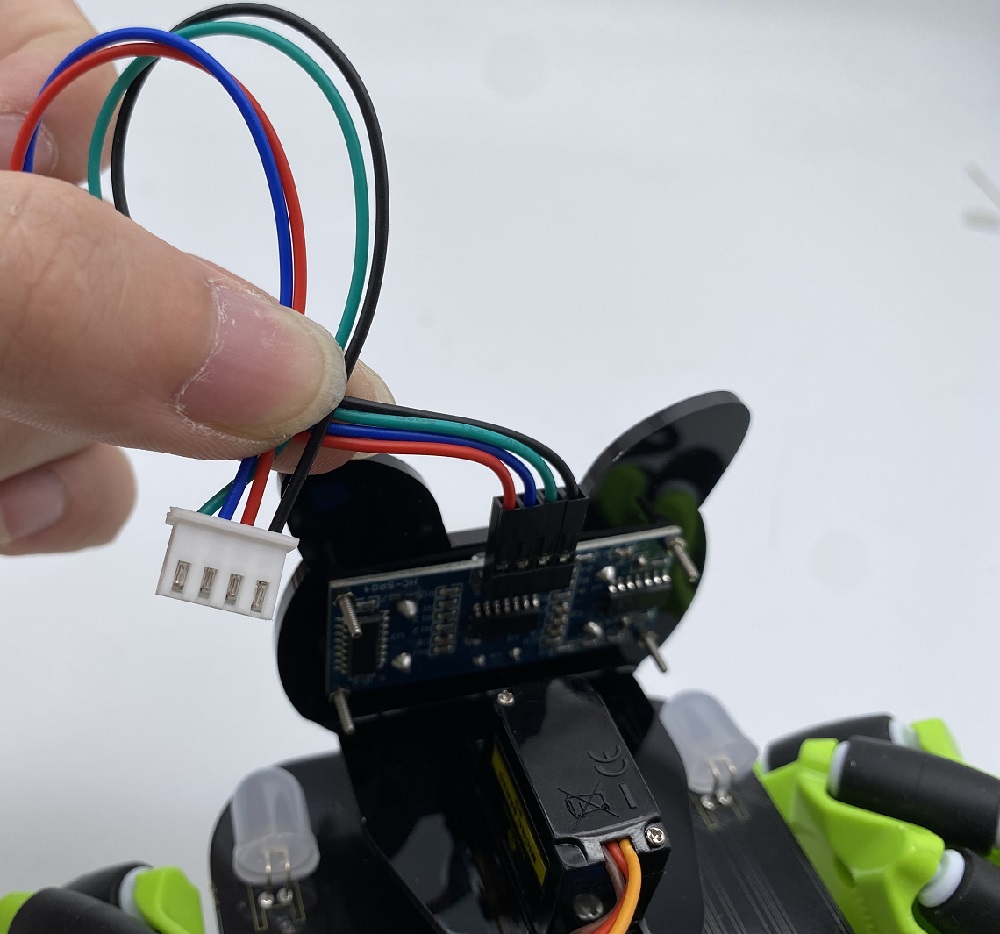
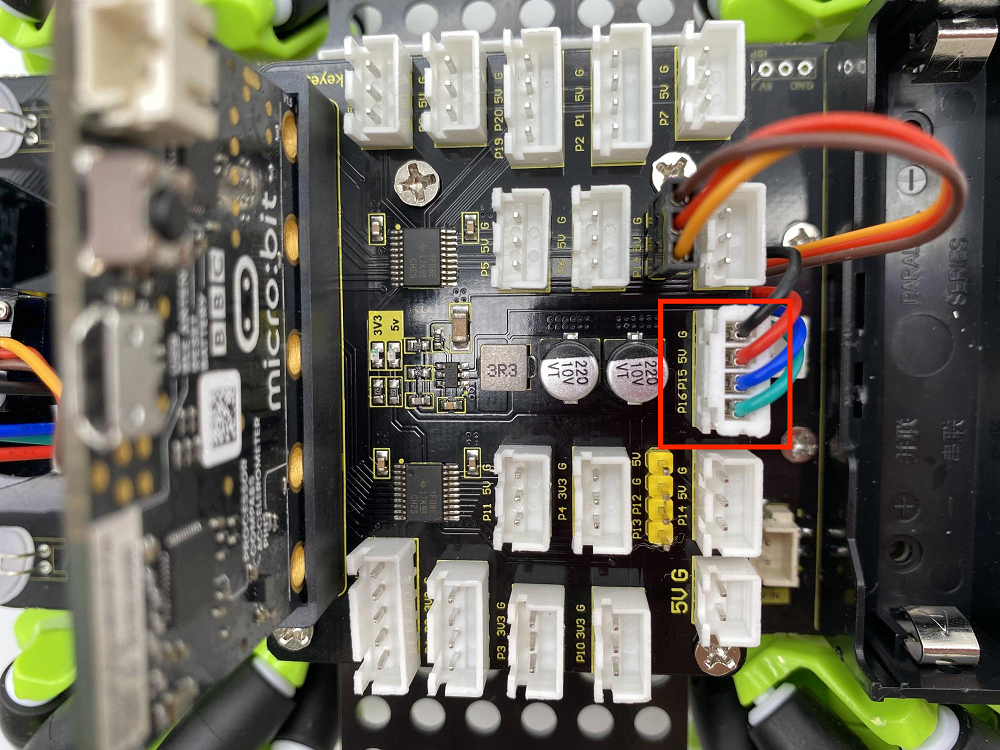
El cableado del sensor ultrasónico:
El cableado del módulo receptor IR:
El cableado del RGB:
El cableado para controlar el motor y la luz de siete colores:
El cableado para controlar el sensor de seguimiento de línea de 3 canales:
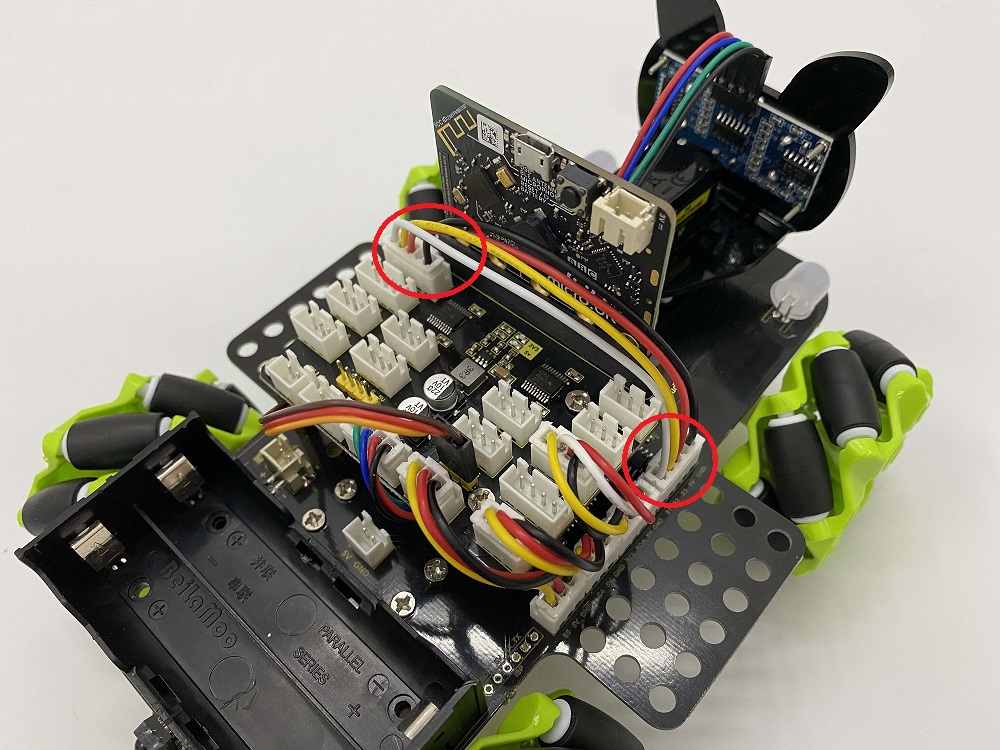
El cableado de la alimentación:
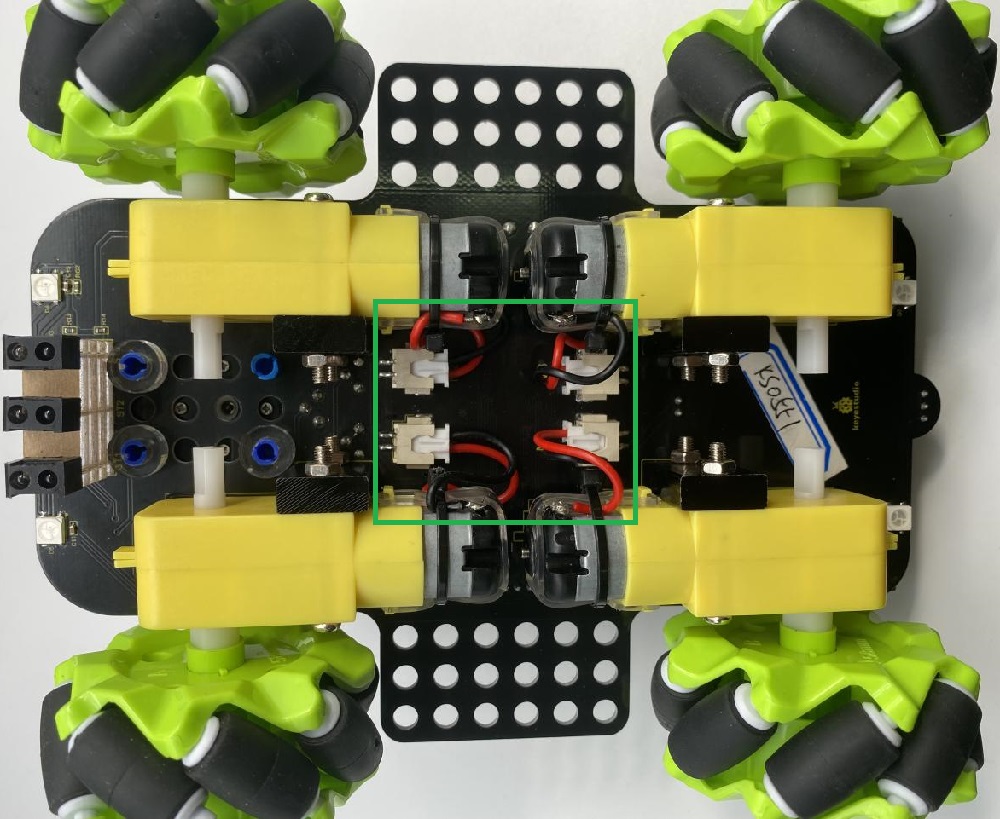
La interfaz correspondiente del motor:
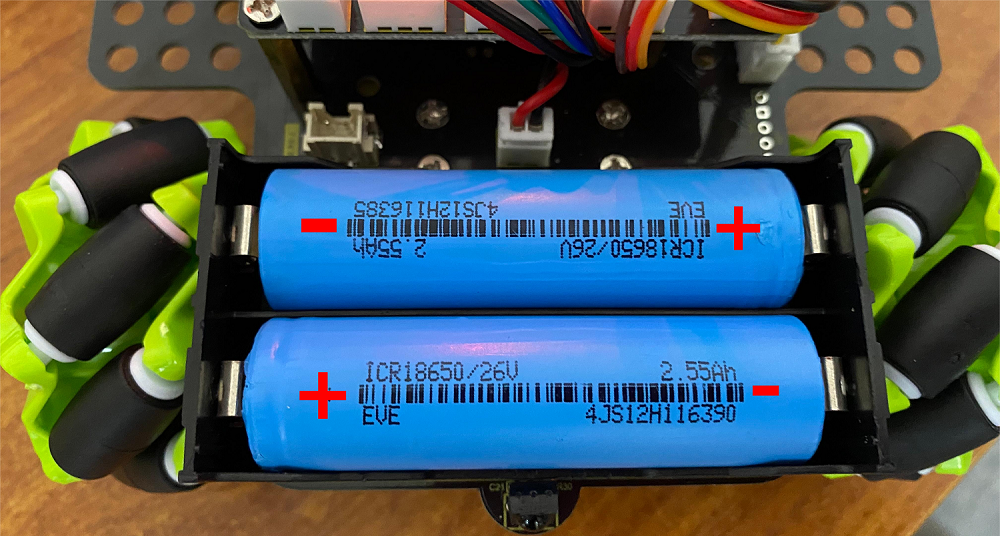
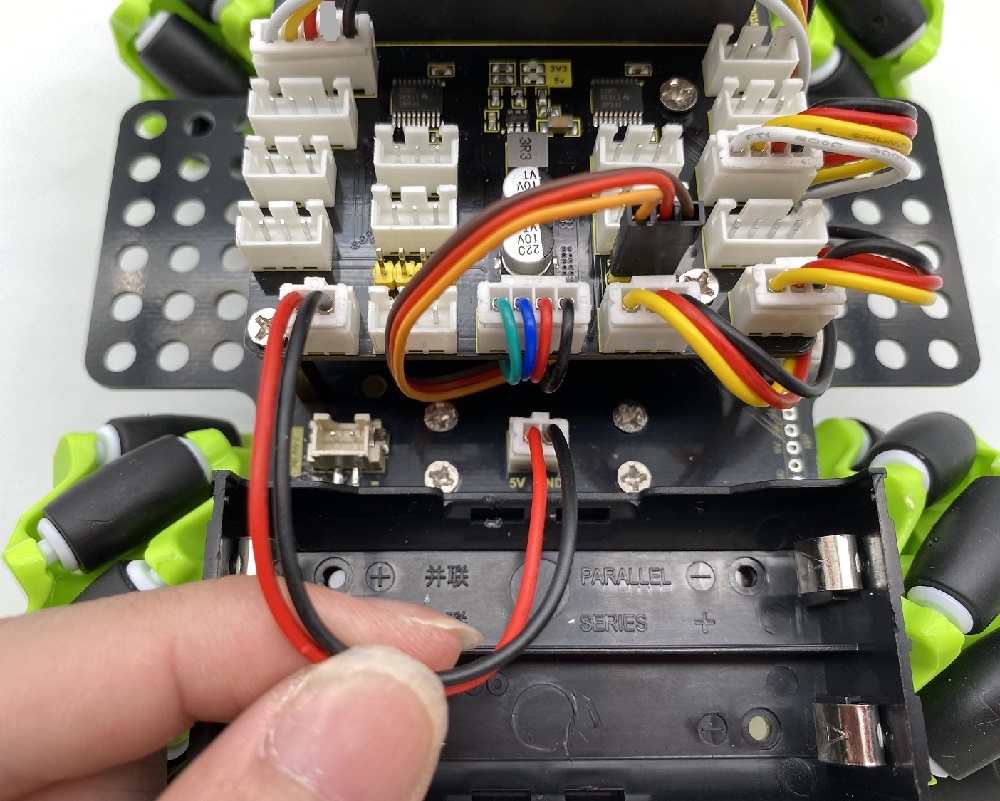
La instalación de la batería: