L’installation du Keyestudio 4WD Mecanum Robot Car V2.0
Étape 1
Composants nécessaires :
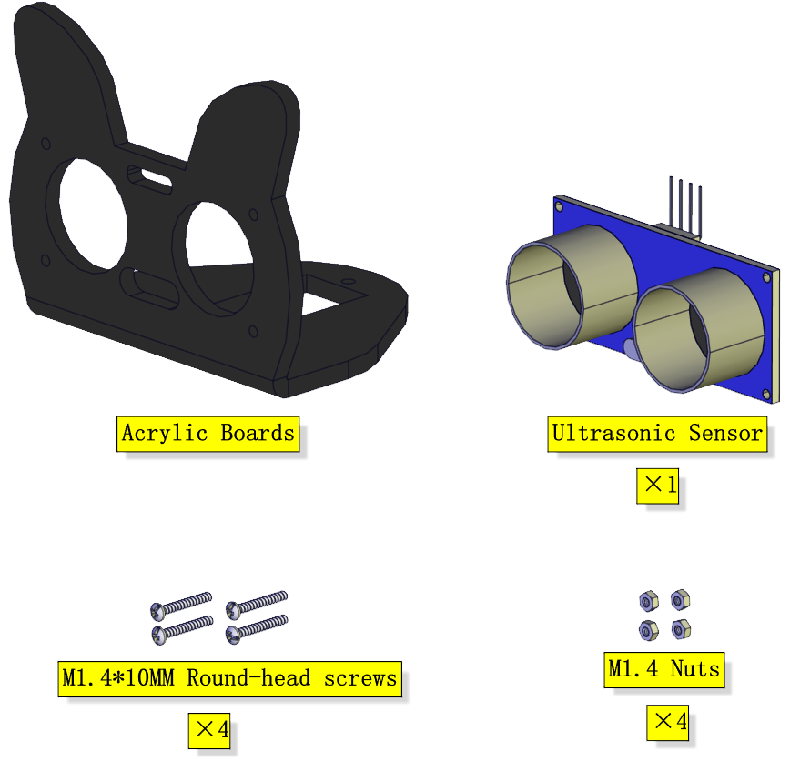
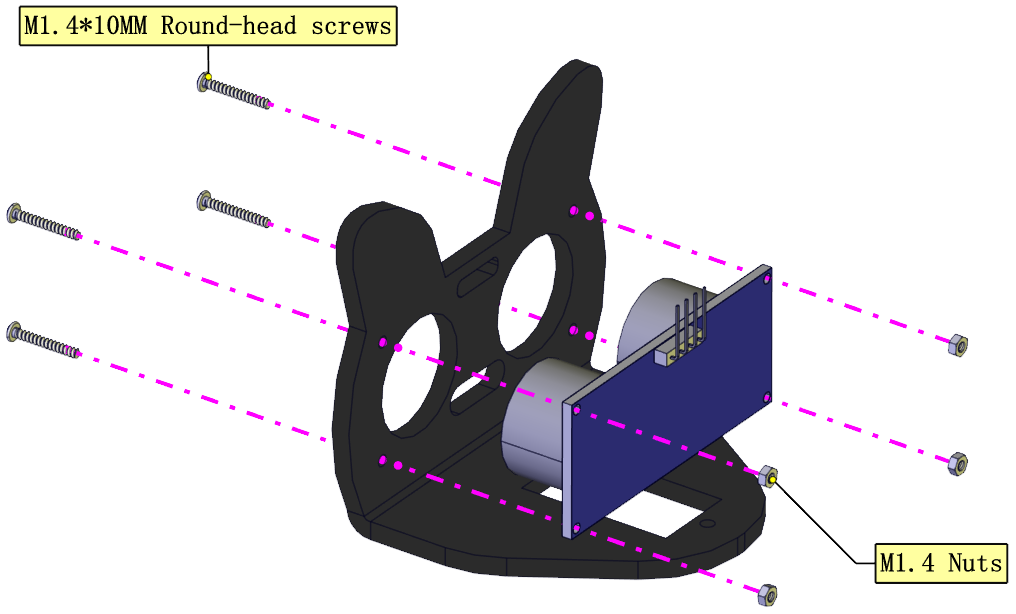
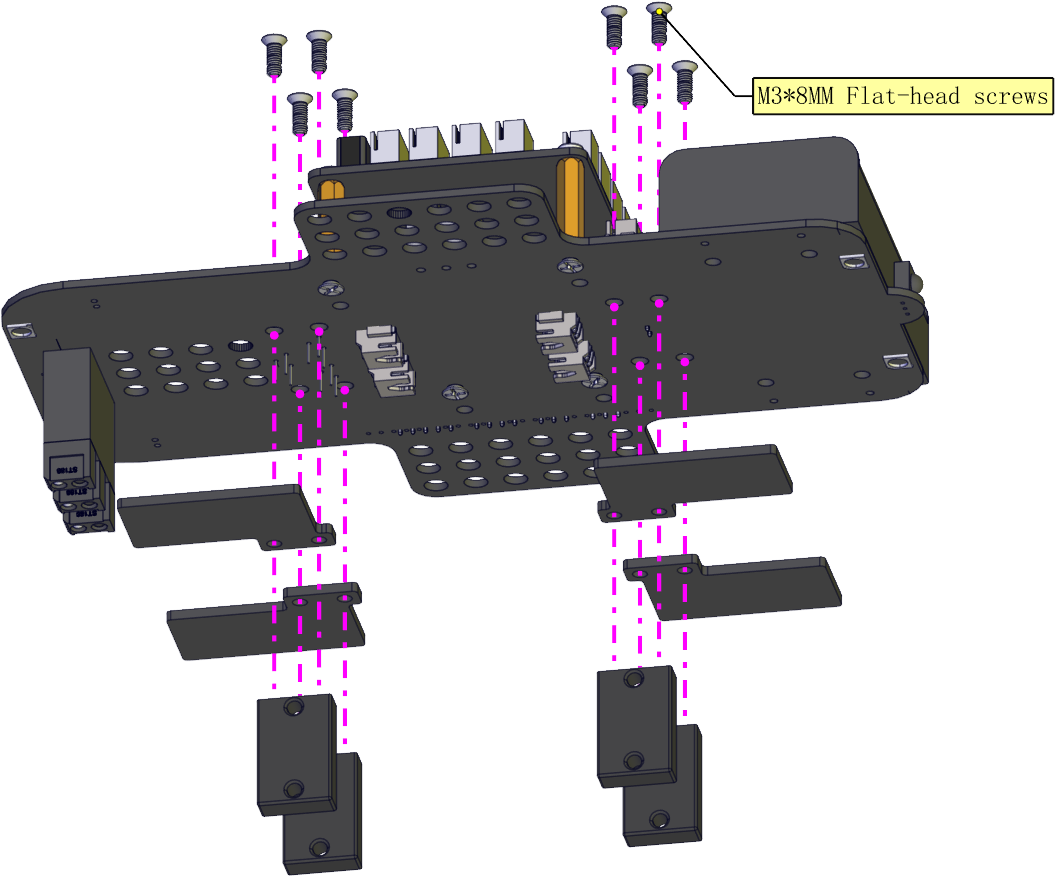
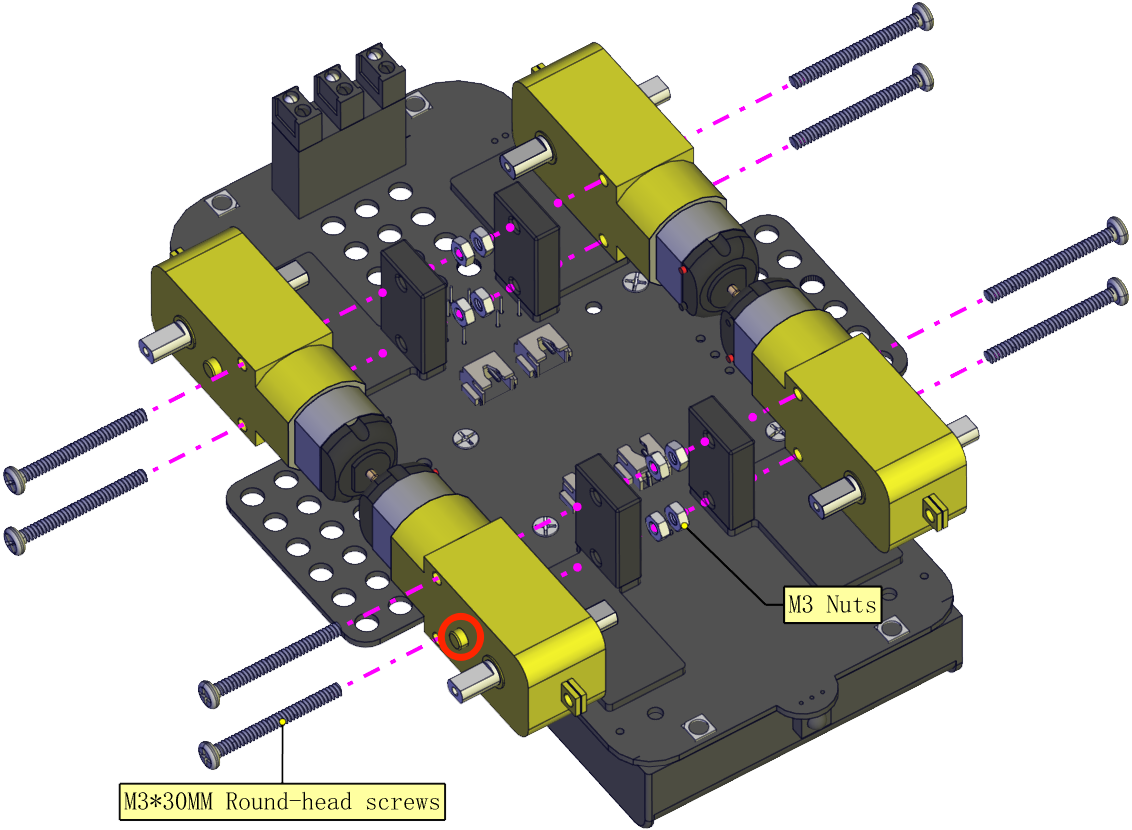
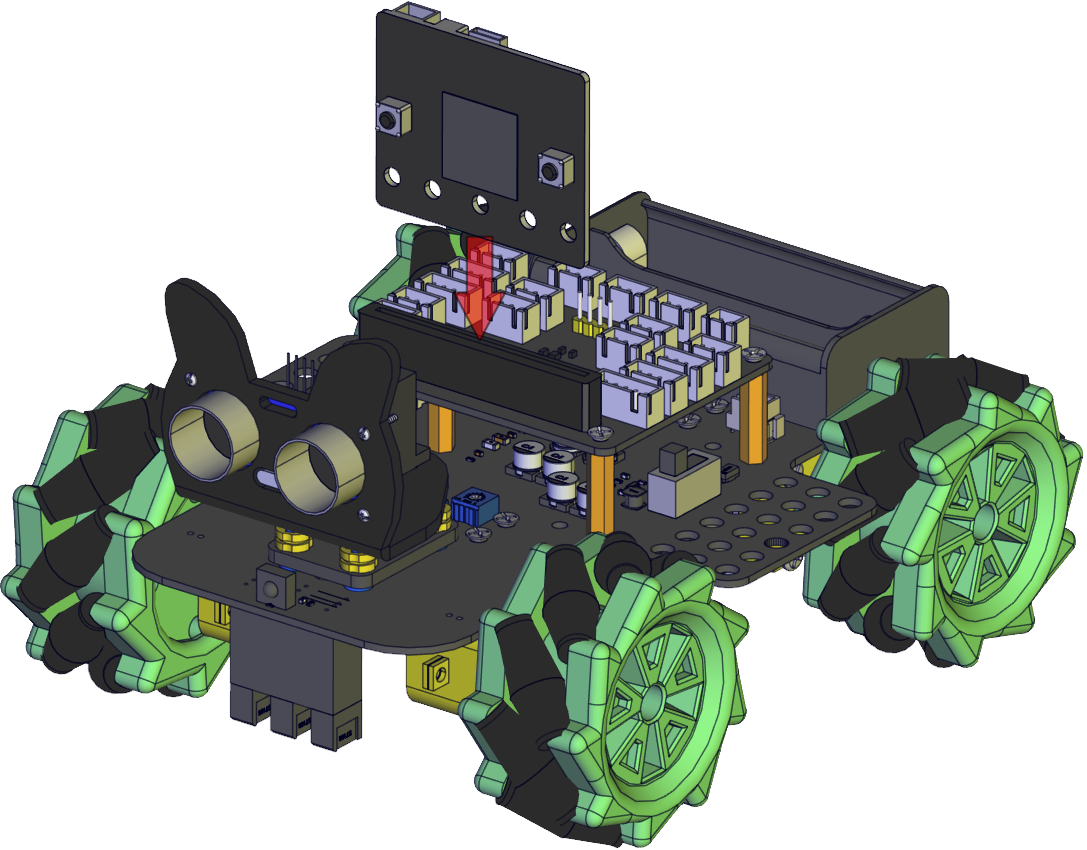
Schéma d’installation :
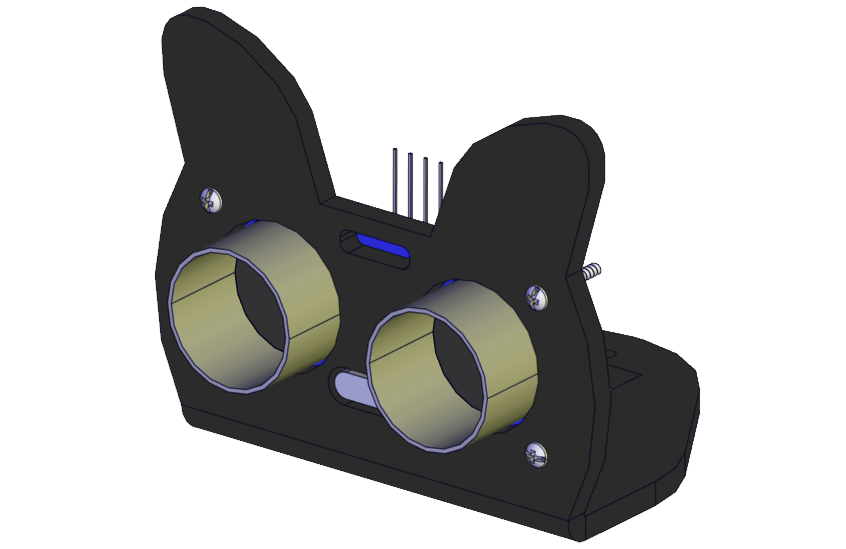
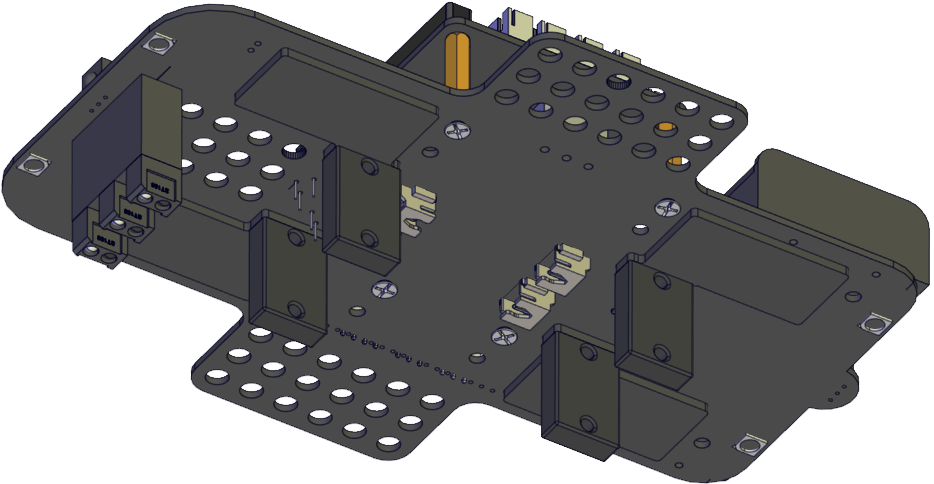
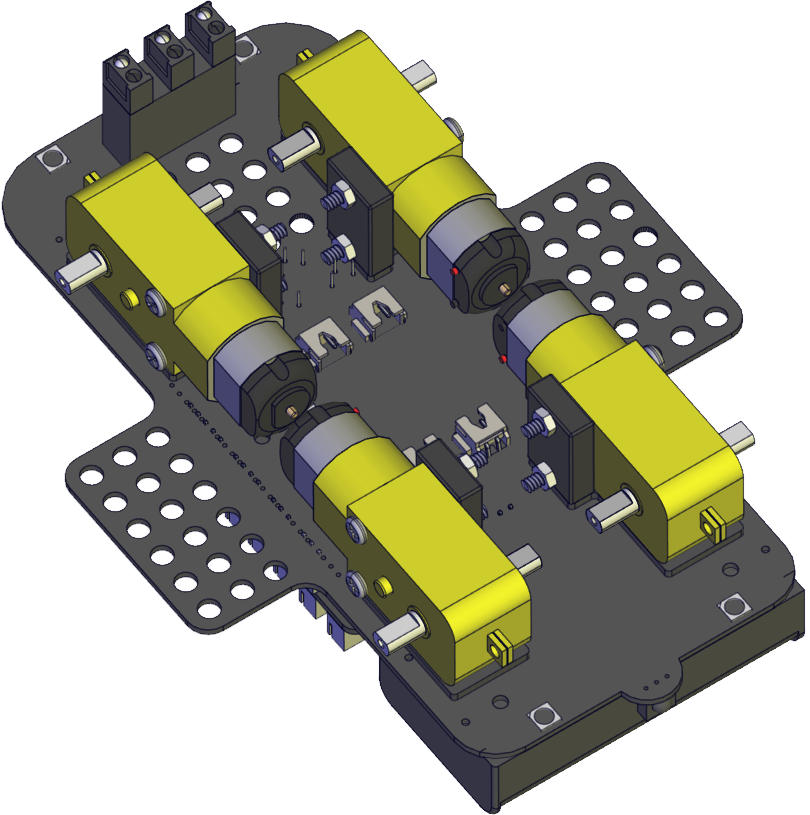
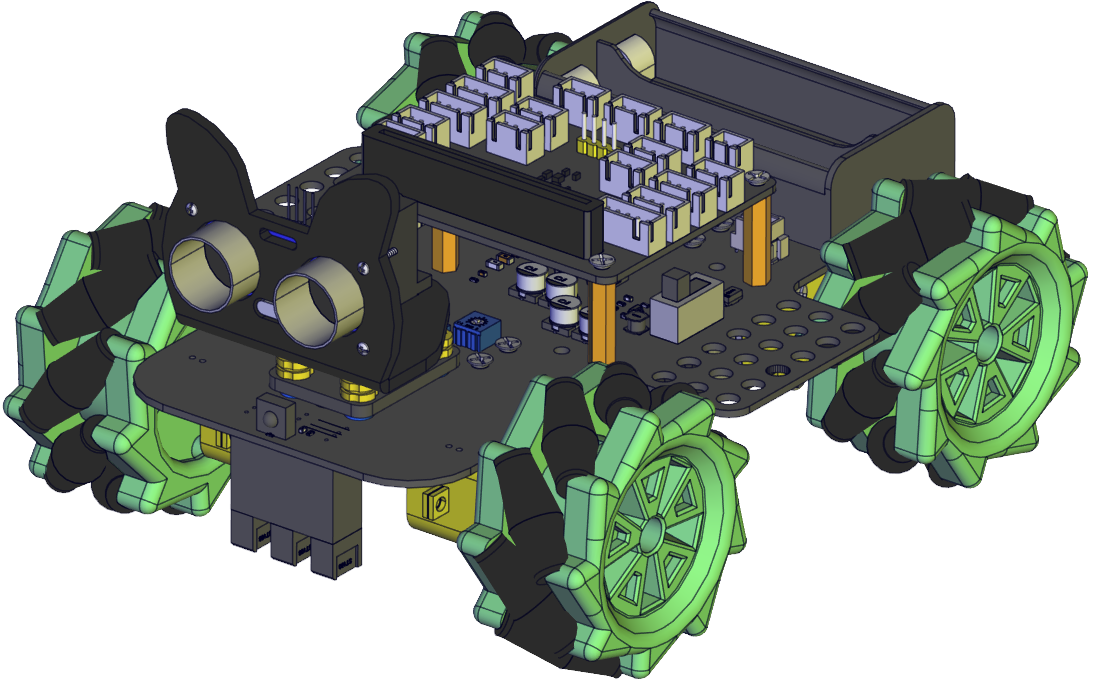
Prototype :
Étape 2
Composants nécessaires :
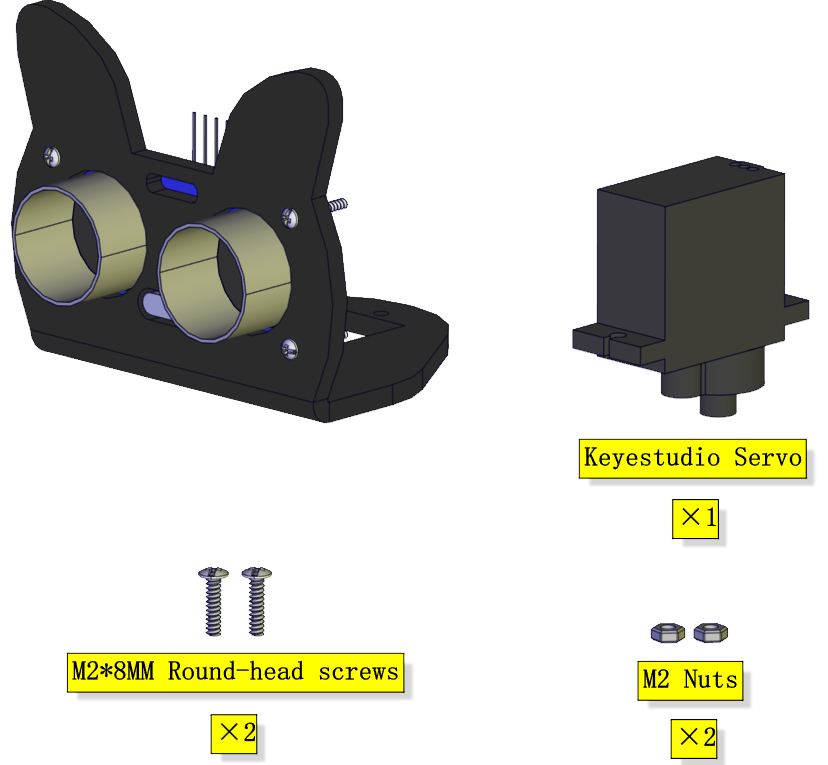
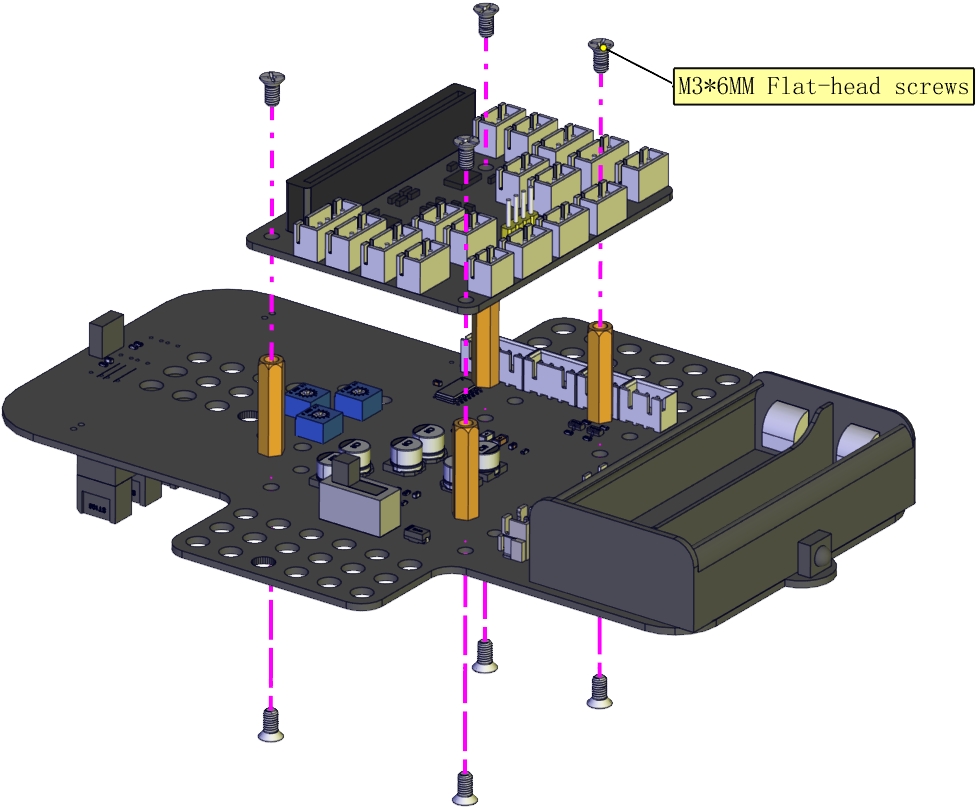
Schéma d’installation :
Prototype :
Étape 3
Composants nécessaires :
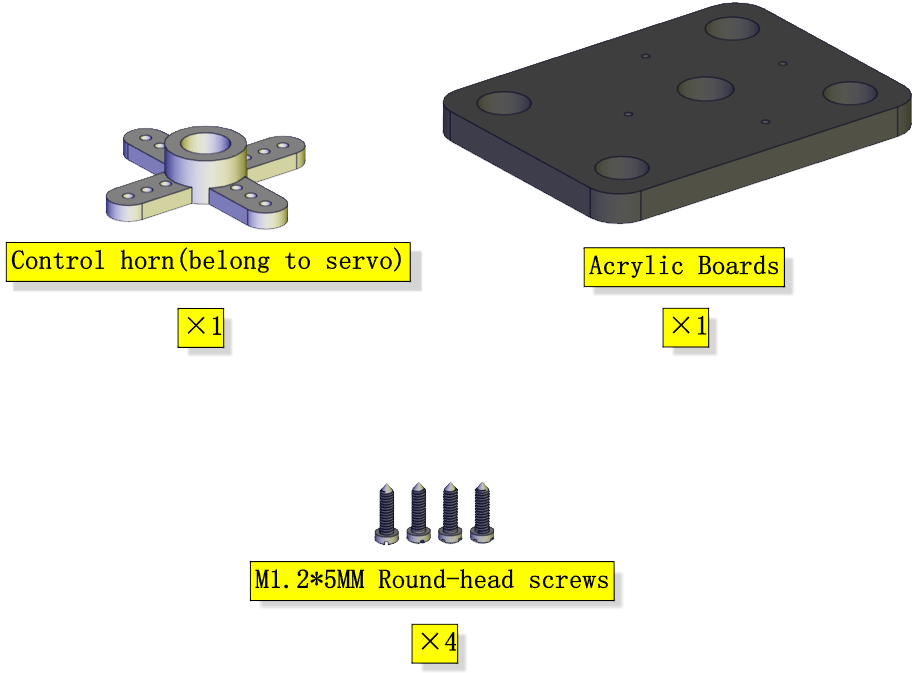
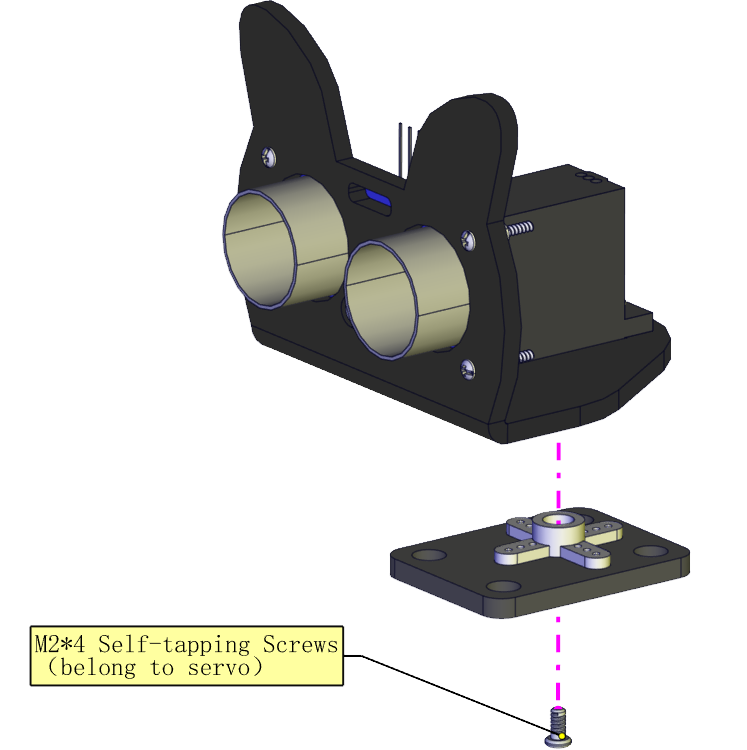
Schéma d’installation :
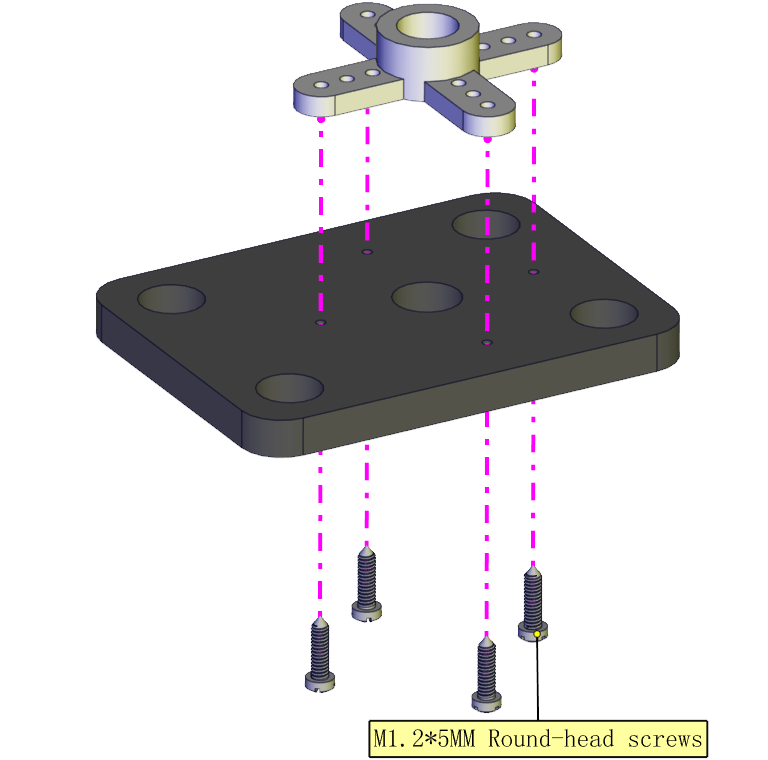
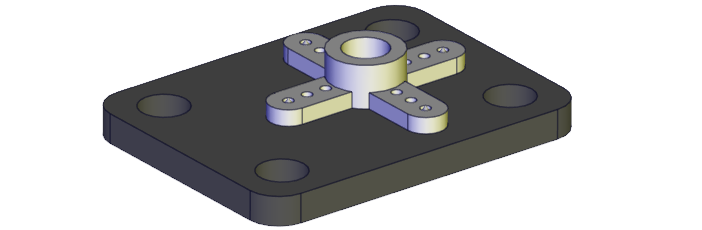
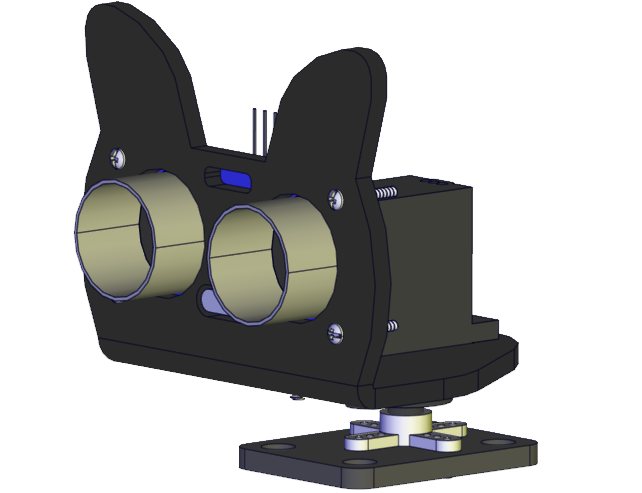
Prototype :
Étape 4
(réglez d’abord l’angle du servo)
Réglez l’angle du servo à 90 degrés.
Méthode 1 : code MakeCode
⚠️Remarque spéciale : Avant d’écrire le code et de le téléverser, vous devez connaître l’IDE MakeCode et ajouter les fichiers de la bibliothèque. Veuillez accéder au lien suivant : Get Started with makecode

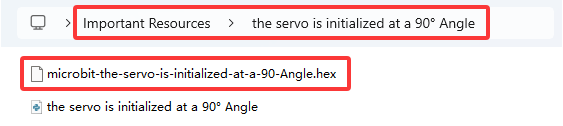
Le code MakeCode ci-dessus est fourni dans les matériaux. Ouvrez le code d’ajustement du servo et téléversez-le sur le microbit de la 4WD Mecanum Robot Car V2.0, puis alimentez via un câble micro USB ou une alimentation externe (passez le DIP switch sur ON). C’est tout. Le code se trouve à l’emplacement indiqué sur l’image :
Méthode 2:code Python
⚠️Remarque spéciale : Avant d’écrire le code et de le téléverser, vous devez installer Mu IDE et ajouter les fichiers de la bibliothèque. Veuillez accéder au lien suivant : Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
Composants nécessaires :
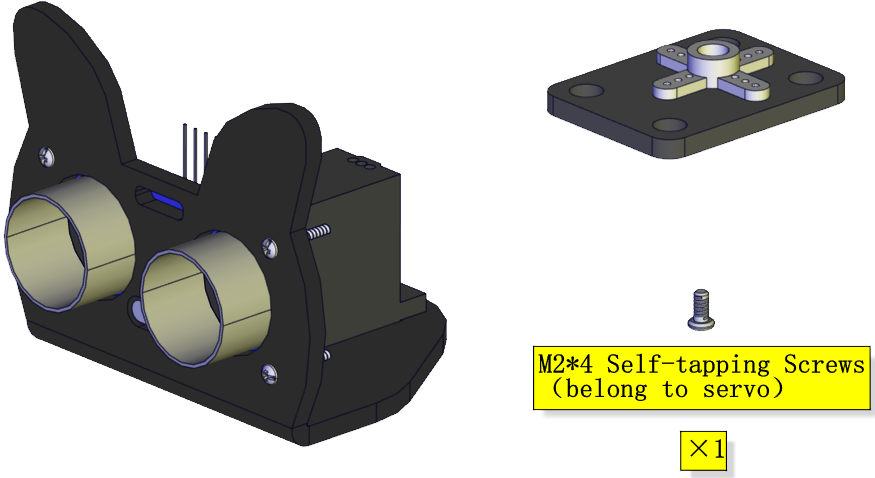
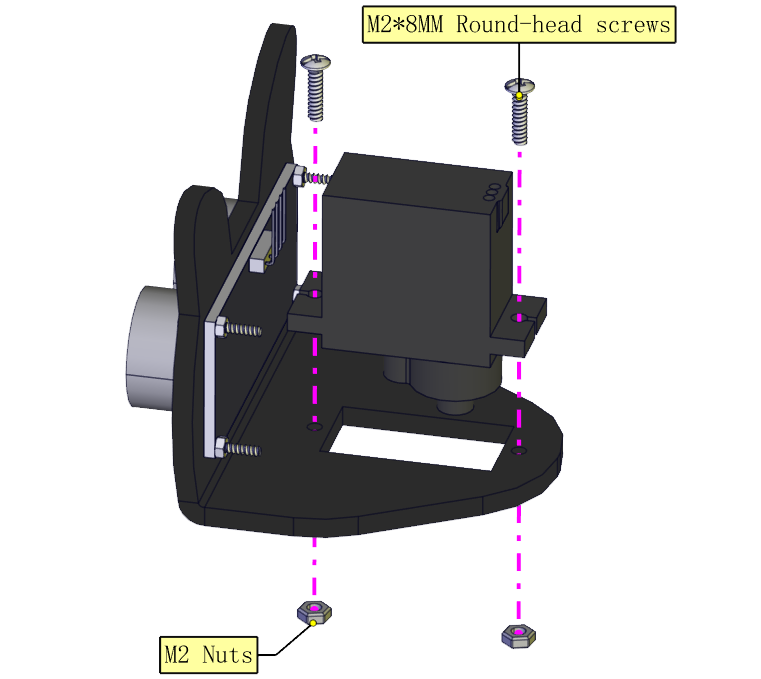
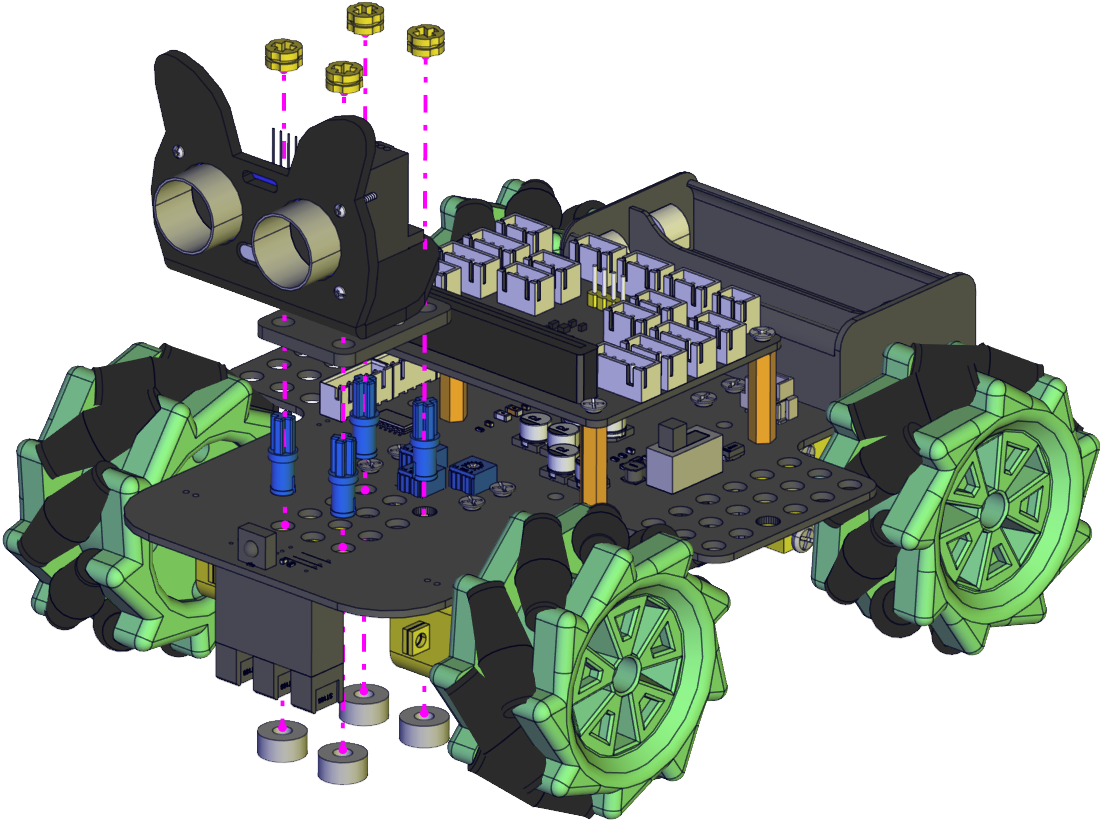
Schéma d’installation : (faites attention au sens d’installation)
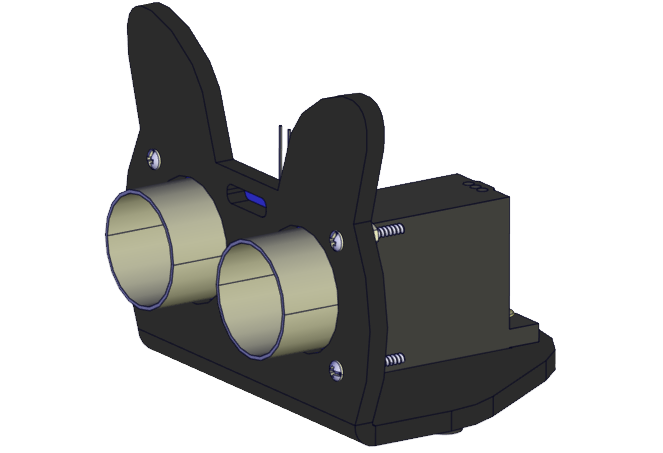
Prototype :
Étape 5
Composants nécessaires :
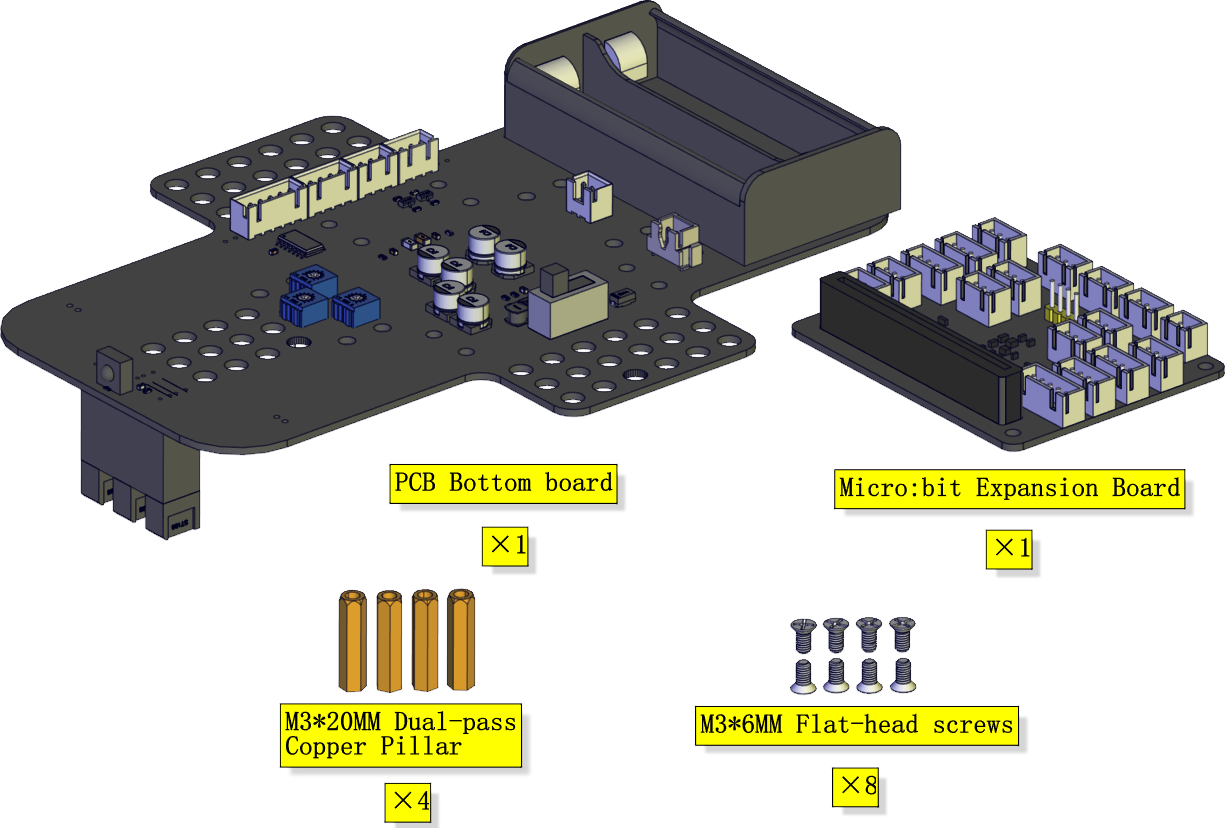
Schéma d’installation :
Prototype :
Étape 6
Composants nécessaires :
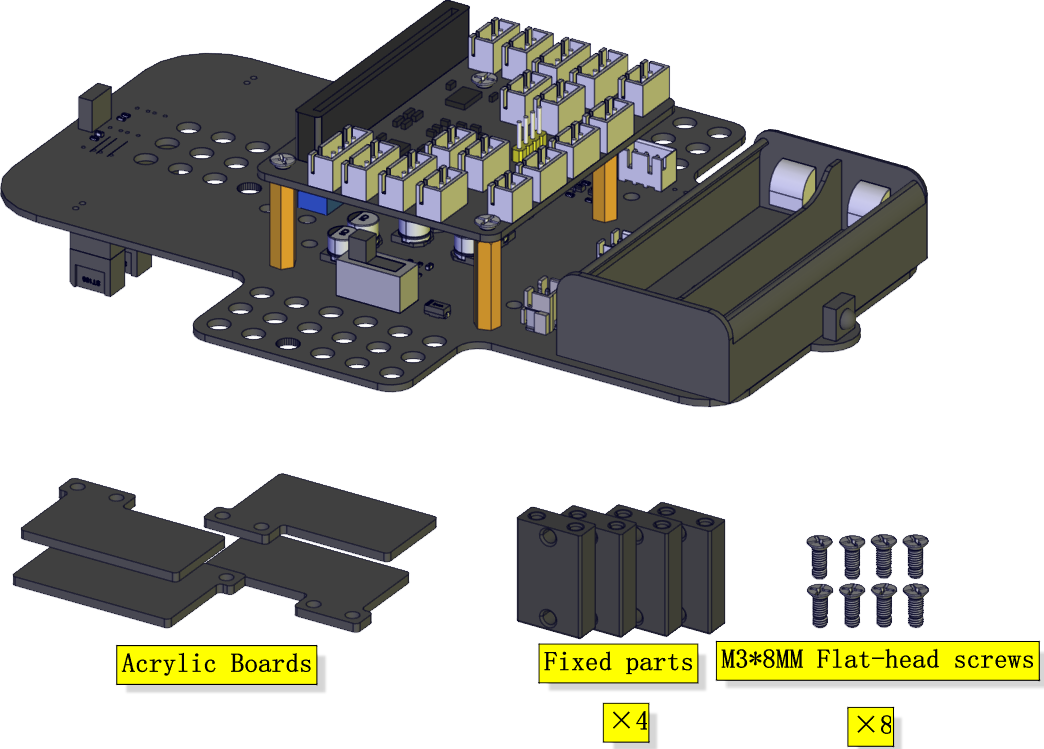
Schéma d’installation :
Prototype :
Étape 7
Composants nécessaires :
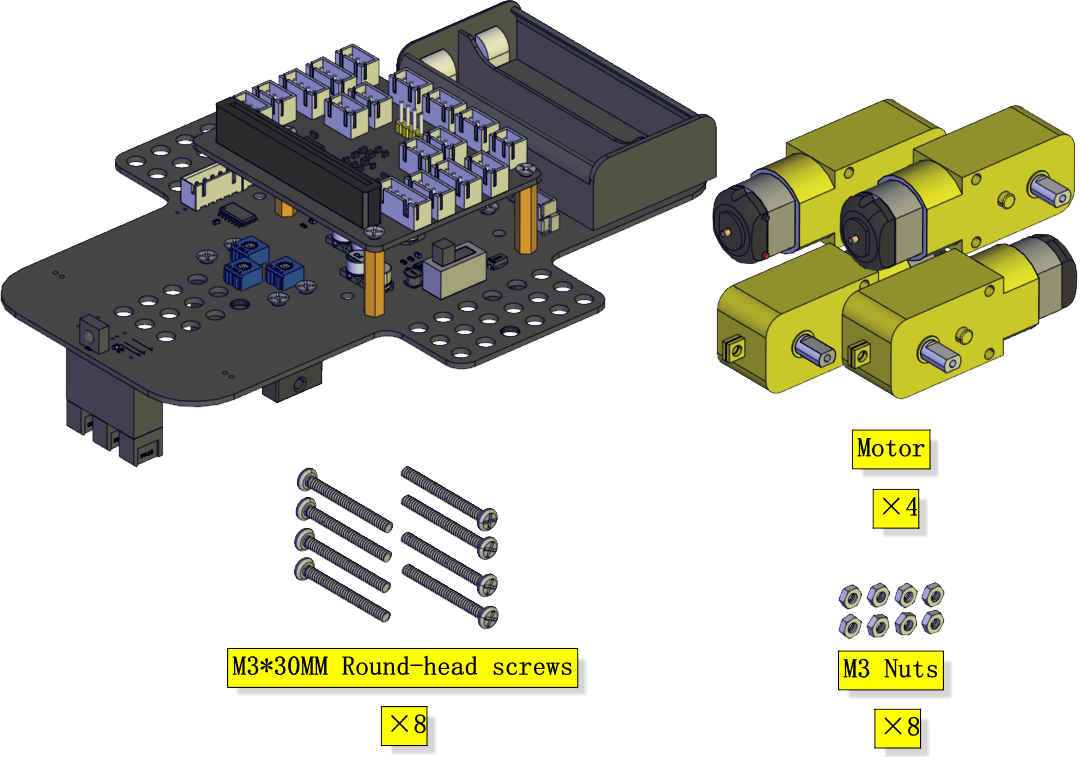
Schéma d’installation : (faites attention au sens du moteur)
Prototype :
Étape 8
Composants nécessaires :
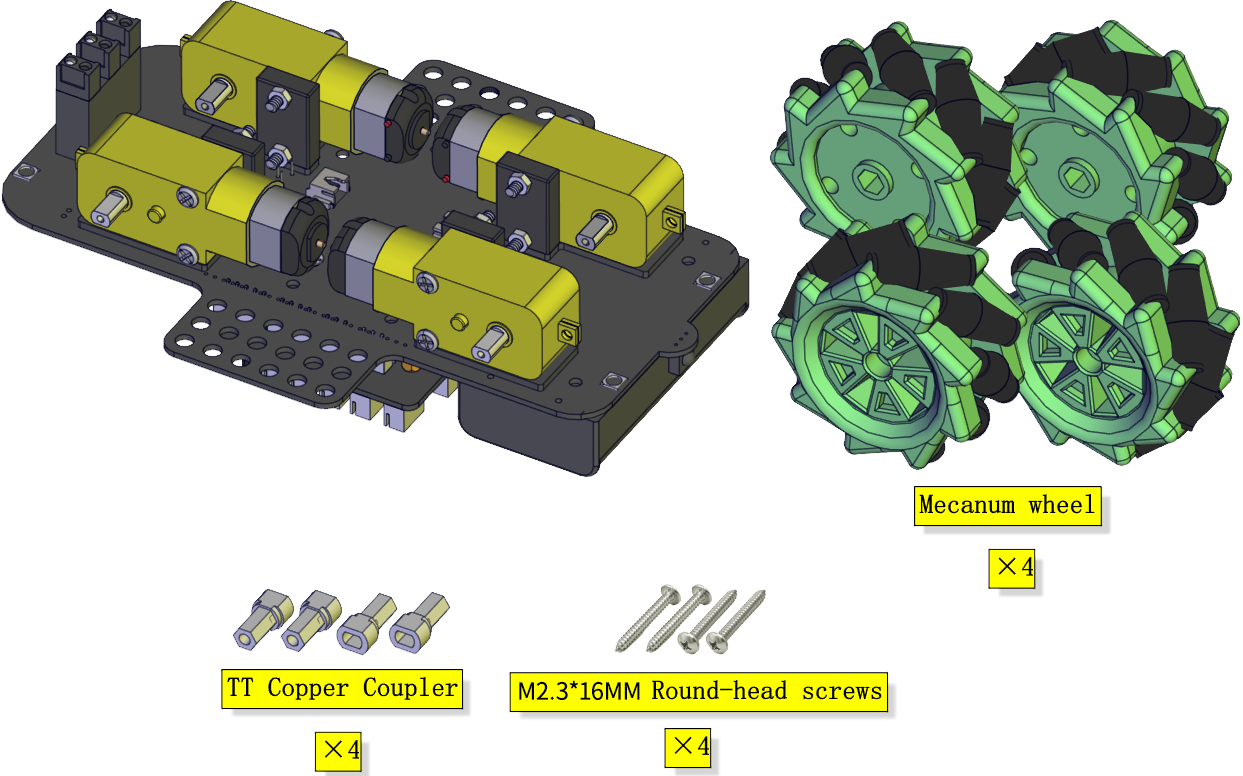
Schéma d’installation : (faites attention au sens d’installation de la roue mecanum)
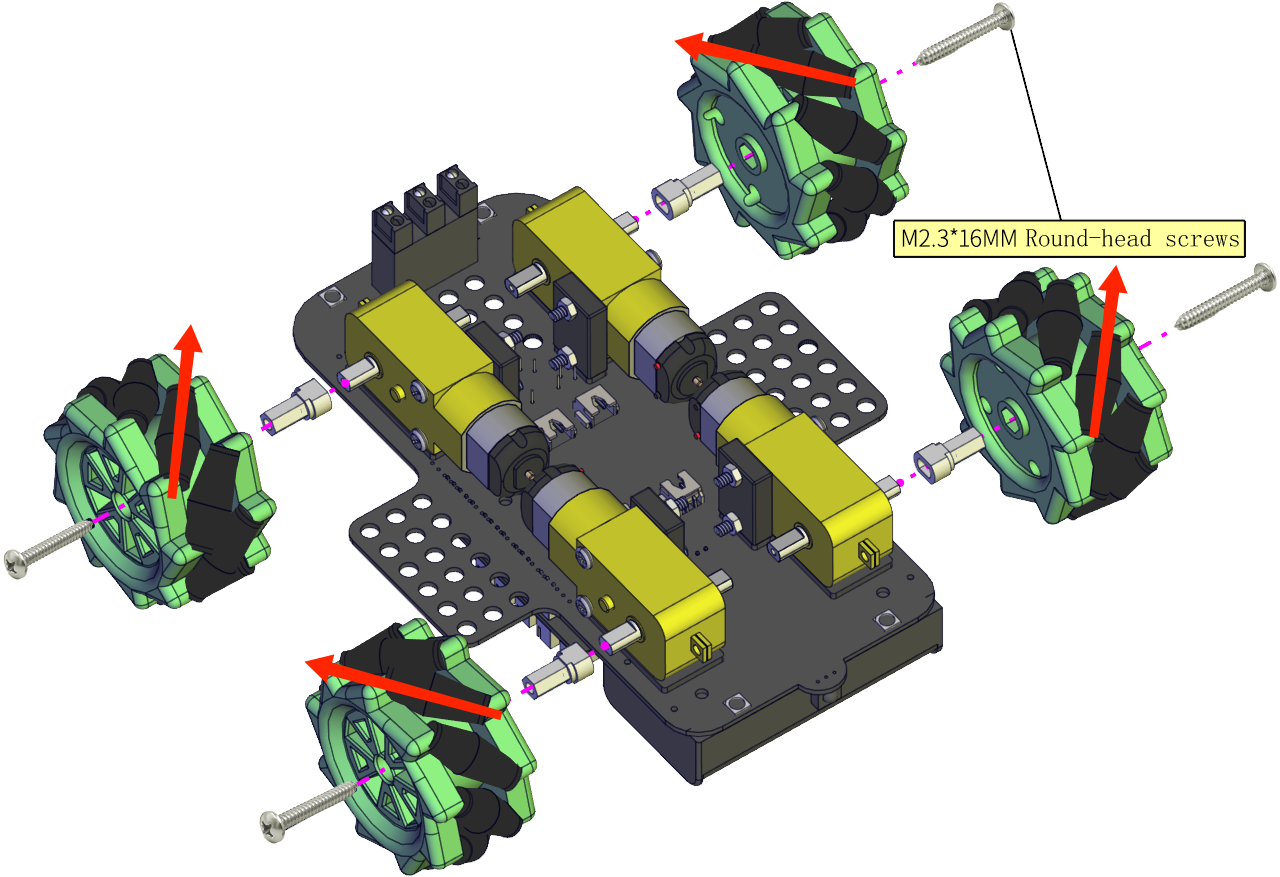
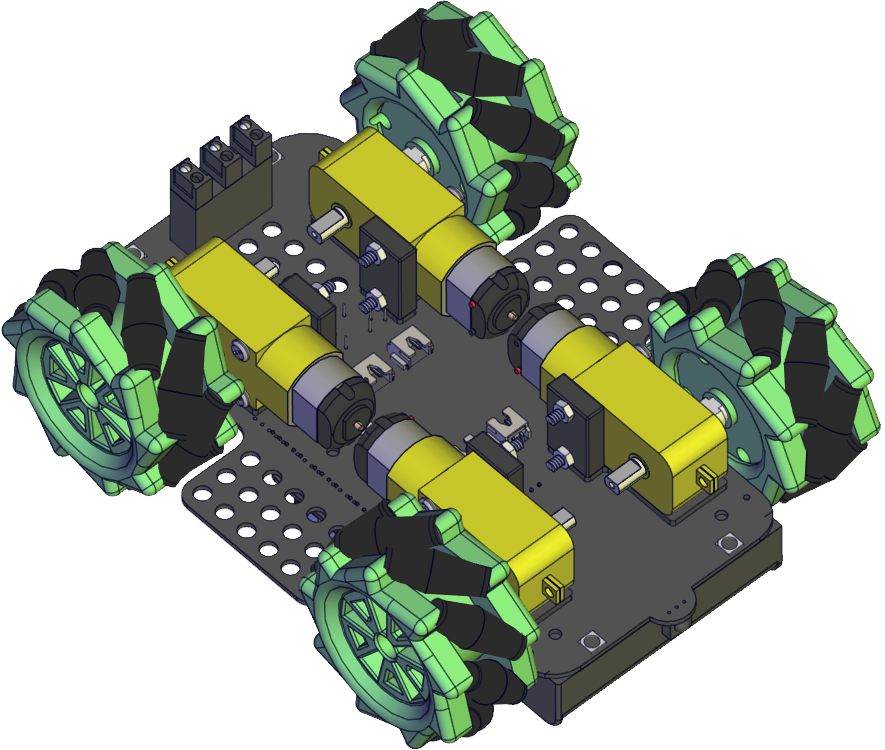
Prototype :
Étape 9
Composants nécessaires :
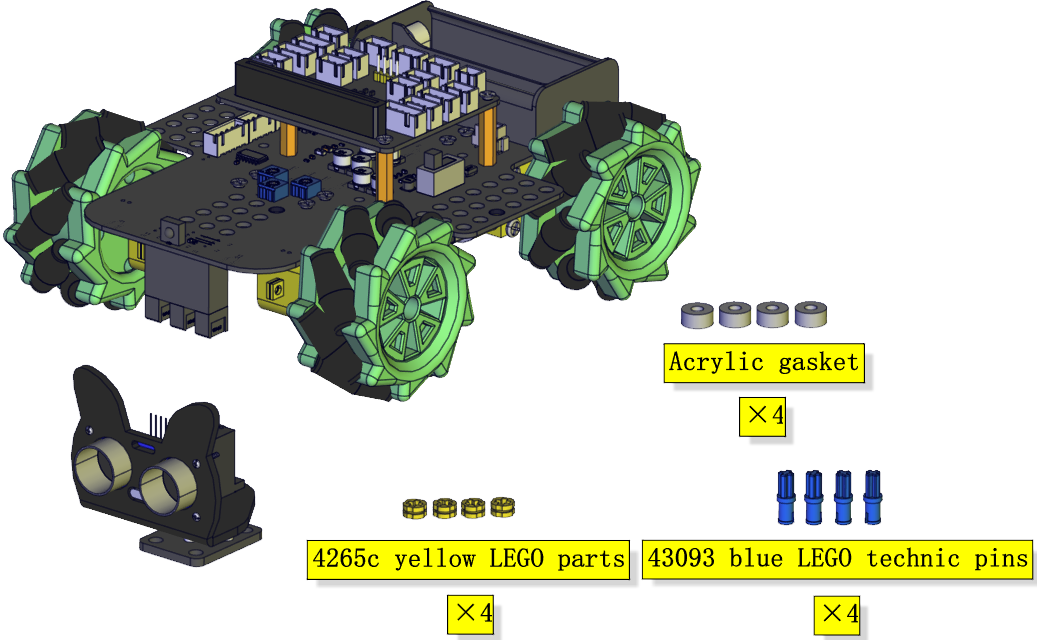
Schéma d’installation :
Prototype :
Étape 10
Composants nécessaires :
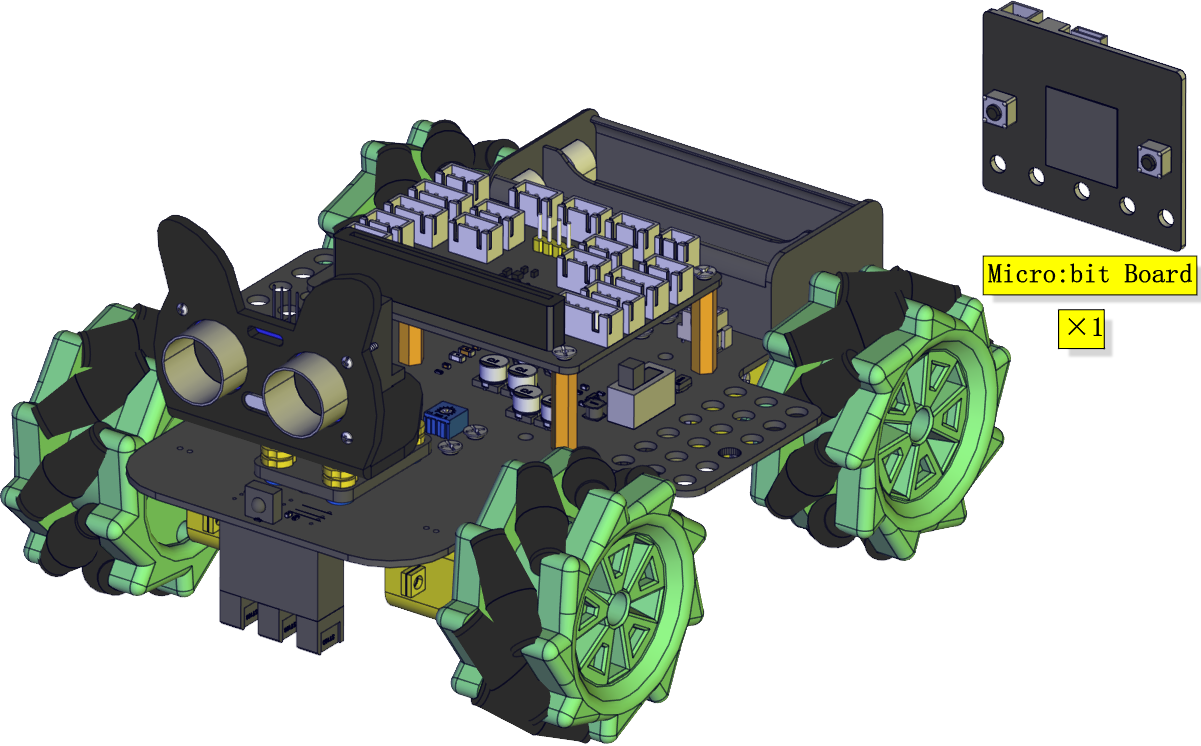
Schéma d’installation :
Prototype :
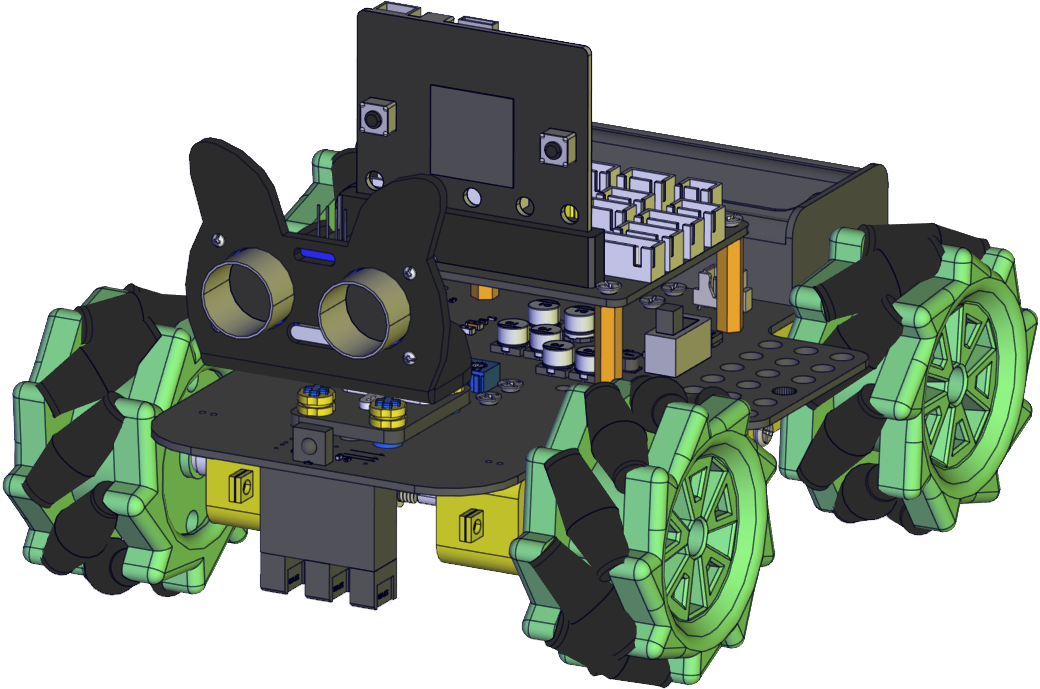
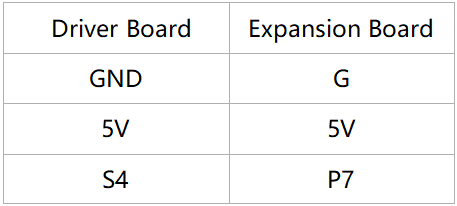
Schéma de câblage
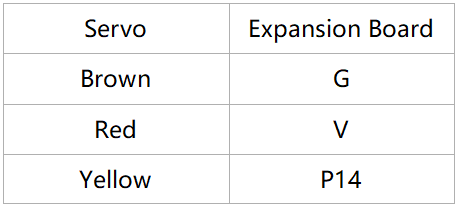
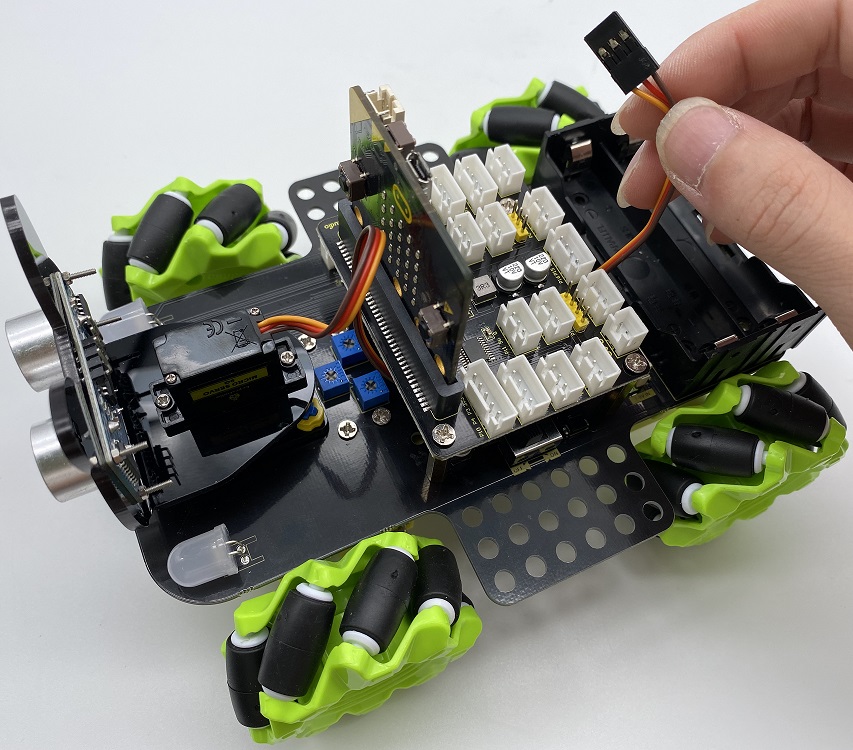
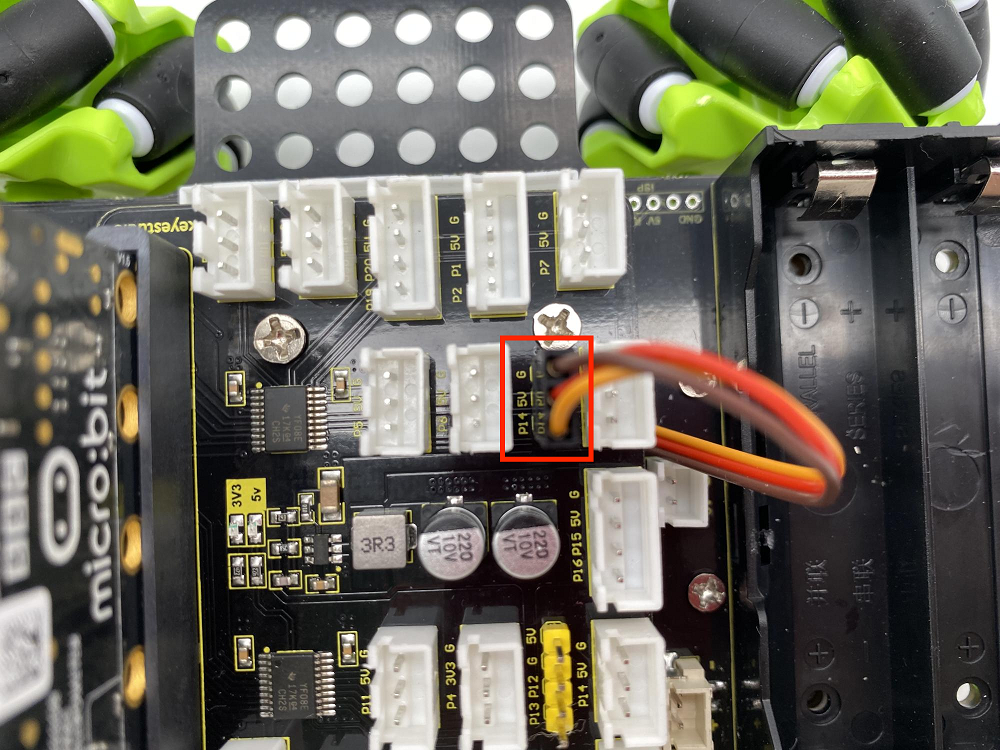
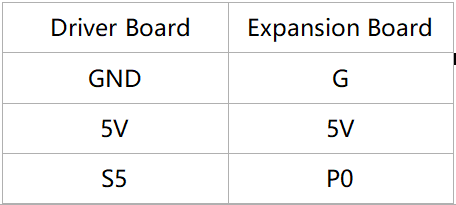
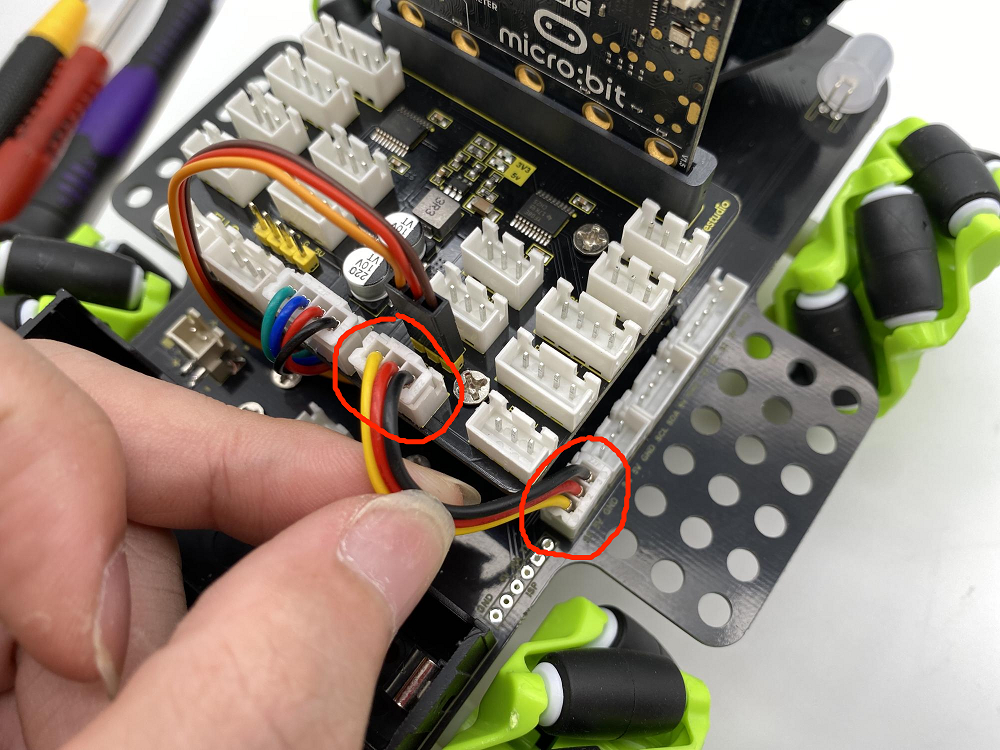
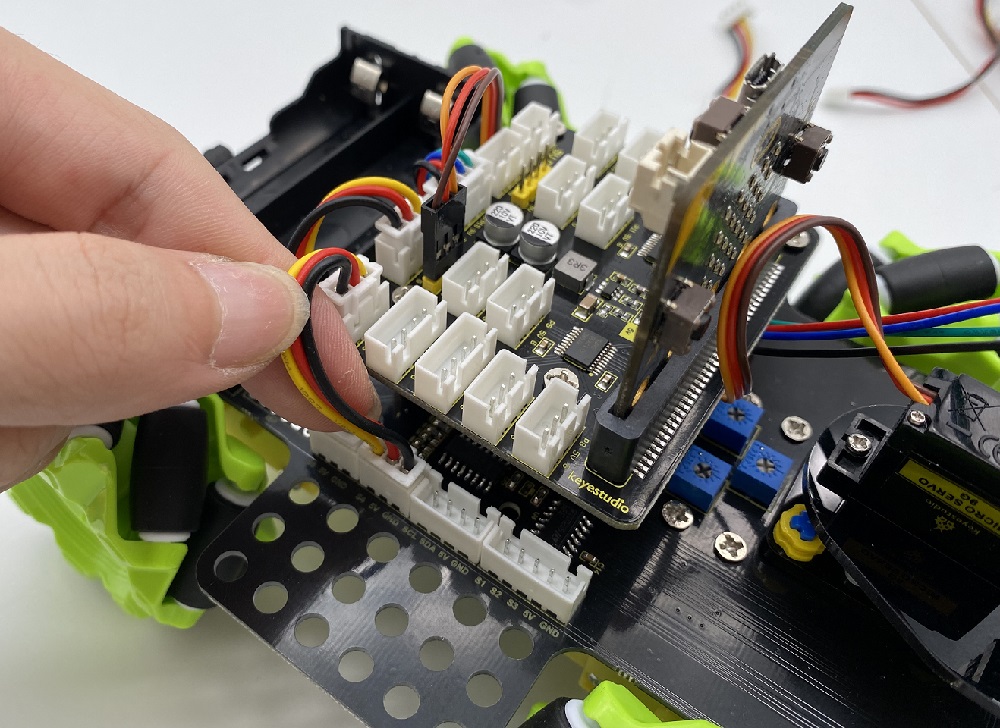
Le câblage du servo :
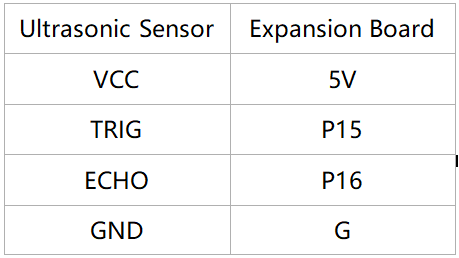
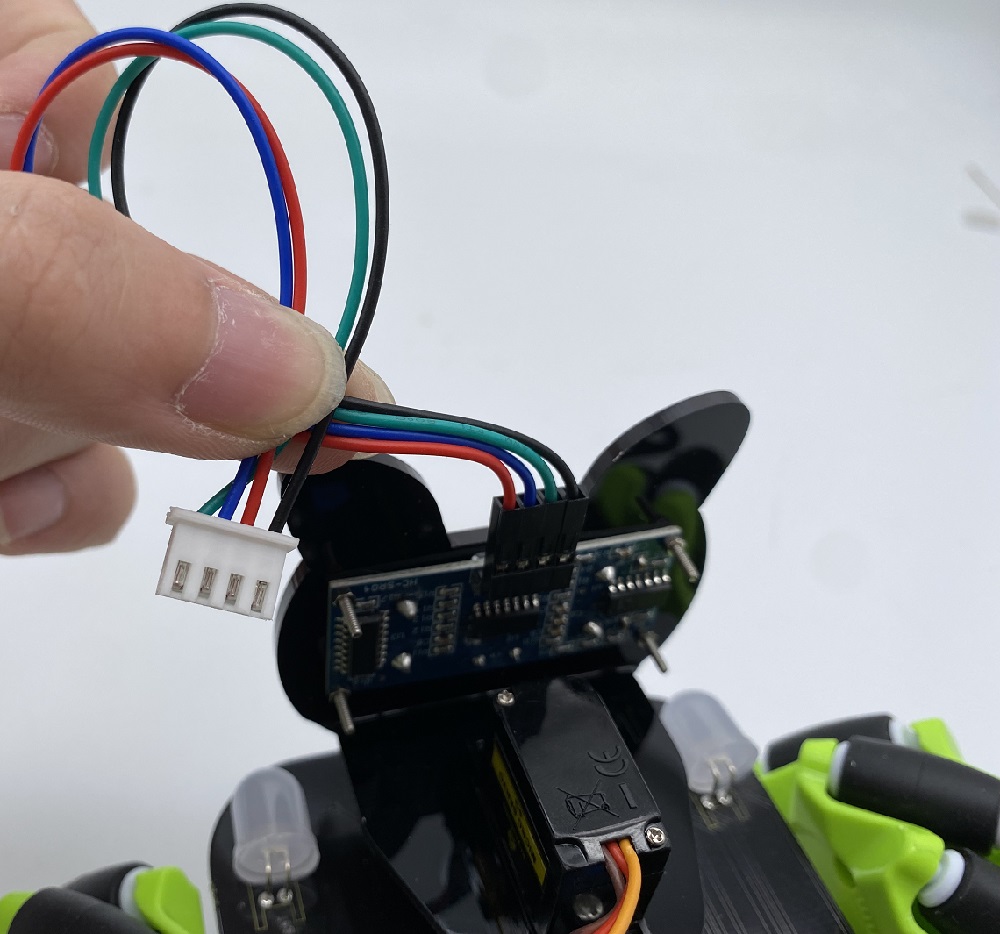
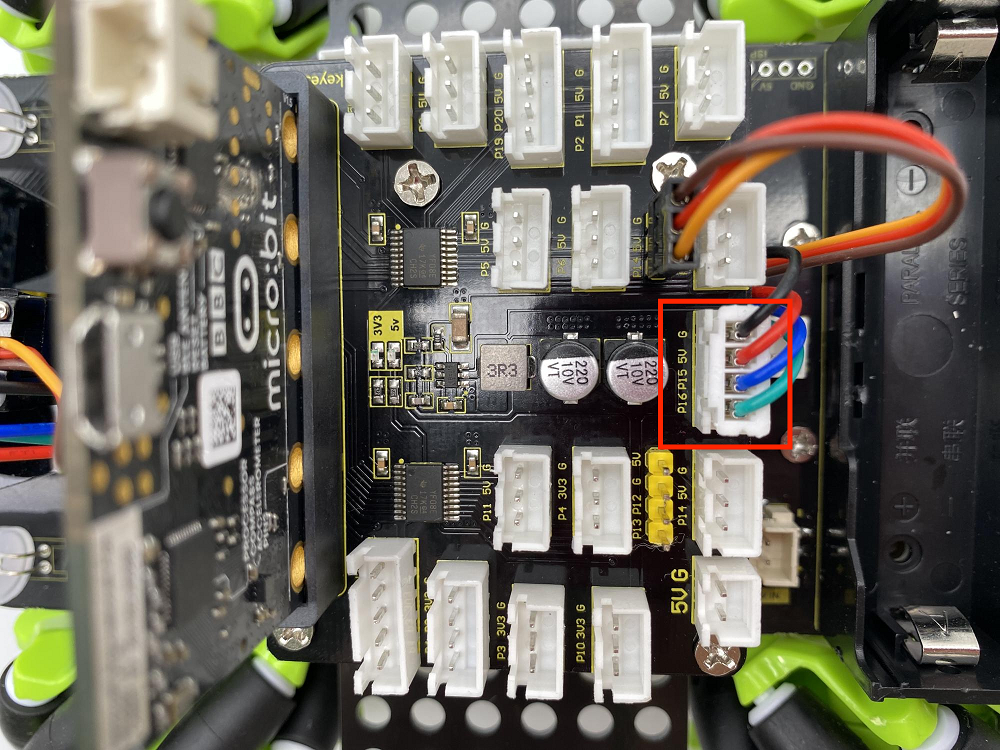
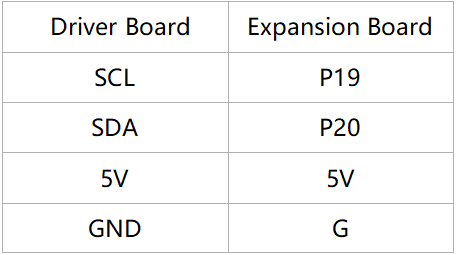
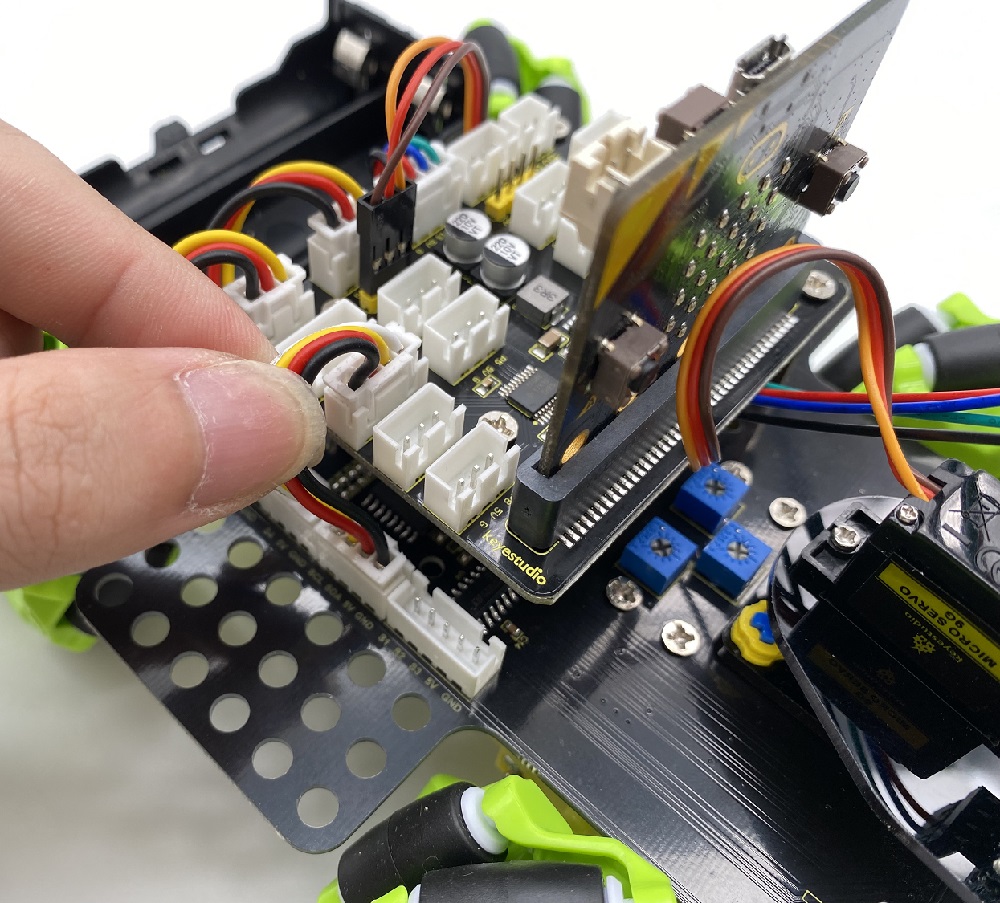
Le câblage du capteur ultrasonique :
Le câblage du module récepteur IR :
Le câblage du RGB :
Le câblage pour contrôler le moteur et la lumière sept-couleurs :
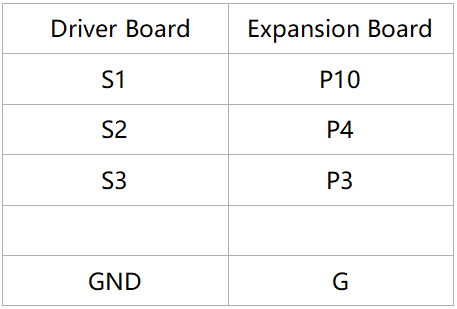
Le câblage pour contrôler le capteur de suivi de ligne 3 canaux :
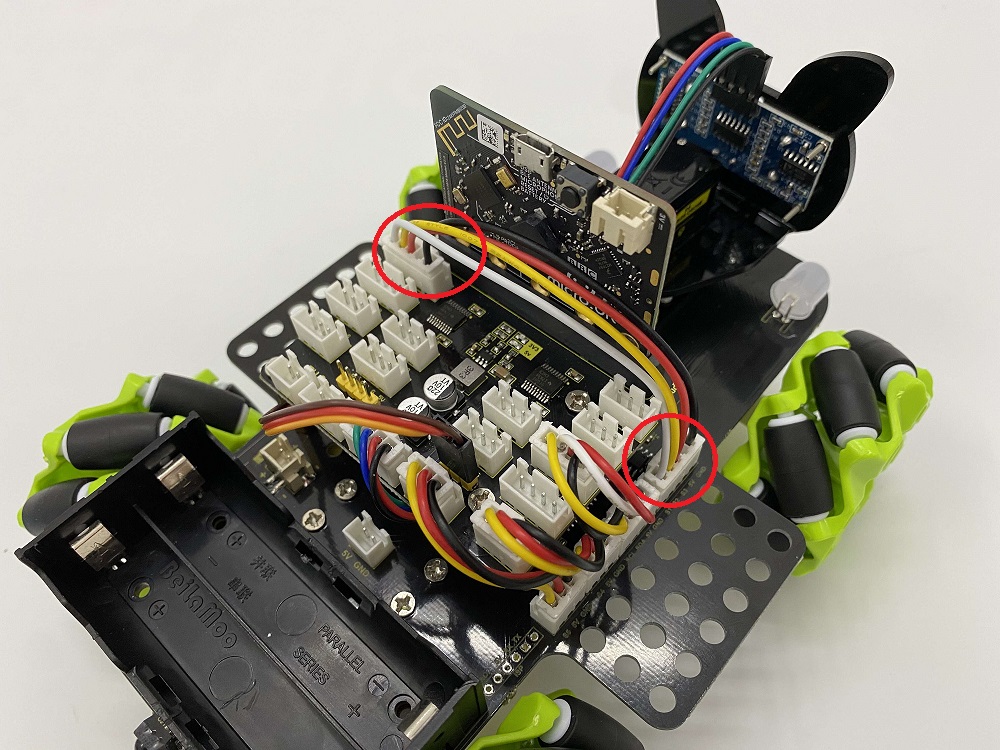
Le câblage de l’alimentation :
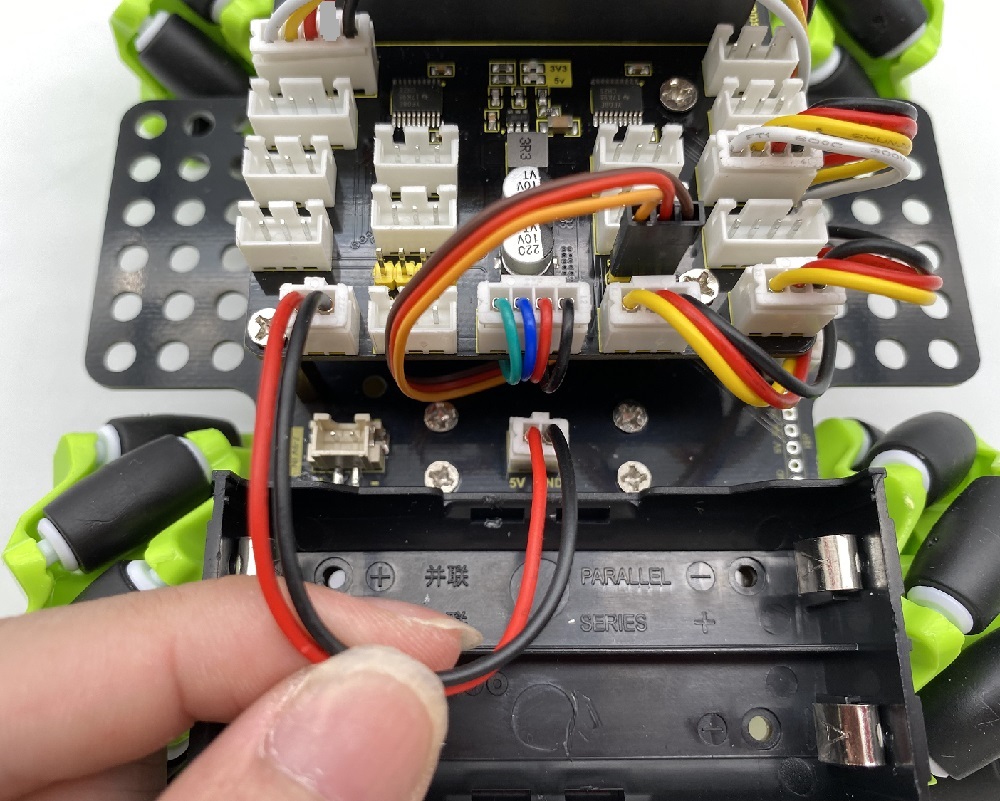
L’interface correspondante du moteur :
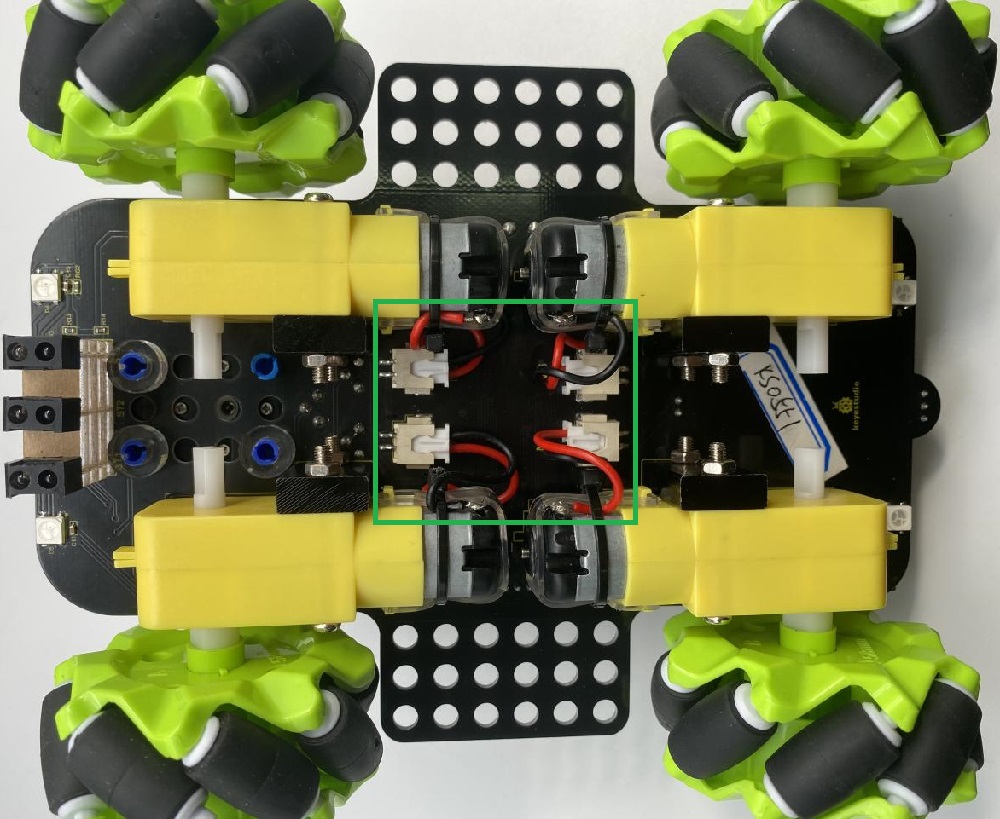
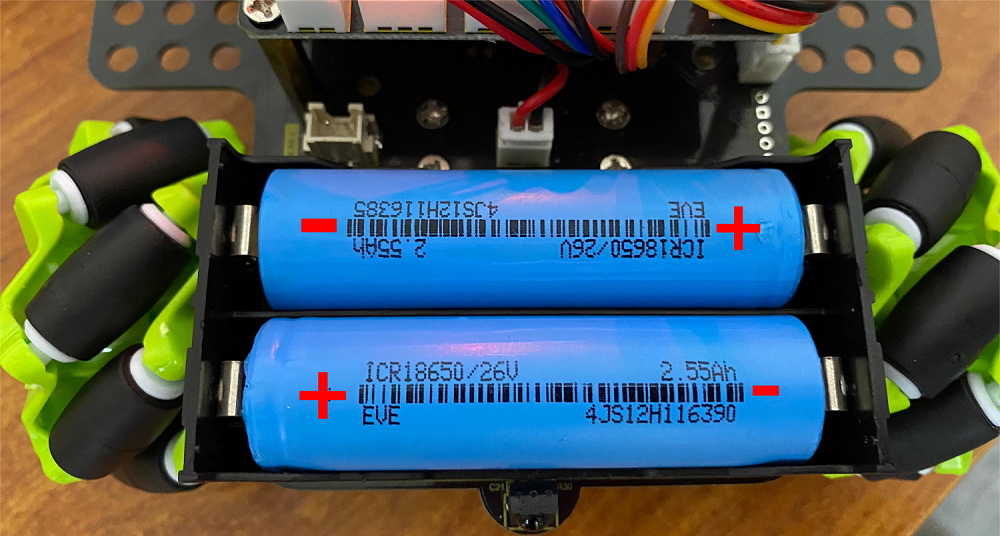
L’installation de la batterie :