Projet 18:Capteur ultrasonique
Projet 18.1:Mesure de distance ultrasonique
1. Description
Le capteur ultrasonique utilise le sonar pour déterminer la distance à un objet, comme le font les chauves-souris. Il offre une excellente détection de distance sans contact avec une grande précision et des mesures stables, dans un boîtier facile d’utilisation. Il est fourni avec les modules émetteur et récepteur ultrasoniques.
Le capteur ultrasonique est utilisé dans un large éventail de projets électroniques pour créer des applications de détection d’obstacles et de mesure de distance ainsi que diverses autres applications.
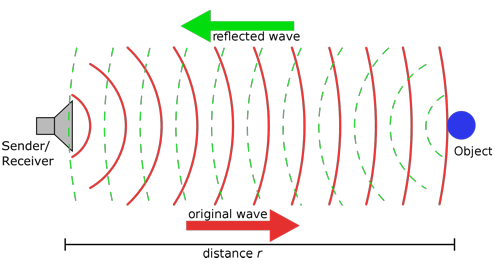
Le module ultrasonique émettra des ondes ultrasoniques après le signal de déclenchement. Lorsque les ondes ultrasoniques rencontrent un objet et sont réfléchies, le module sort un signal d’écho ; il peut ainsi déterminer la distance de l’objet à partir du temps écoulé entre le signal de déclenchement (TRIG) et le signal d’écho (ECHO).
Comme le montre l’image, il ressemble à deux yeux. L’un est l’émetteur, l’autre est le récepteur.
Selon le schéma de câblage ci‑dessus, le port intégré du module capteur ultrasonique est connecté au port 5V G P15 P16 sur la carte de commande de moteur micro:bit. La broche Trig (T) est contrôlée par P15 du micro:bit et la broche Echo (E) par P16.

2. Principe de fonctionnement
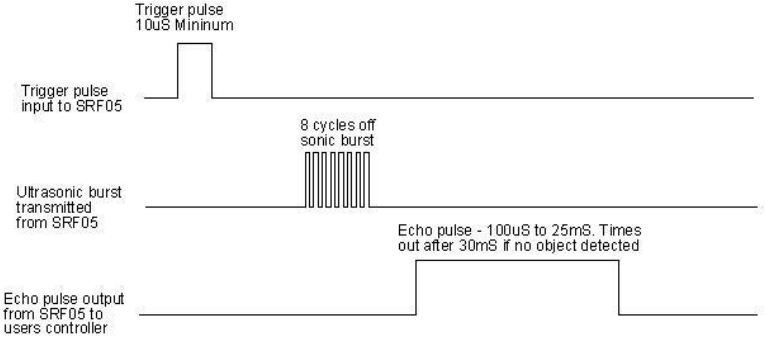
(1) Mettre TRIG à l’état bas puis envoyer un signal de déclenchement d’au moins 10us en niveau haut ;
(2) Après le déclenchement, le module enverra automatiquement huit impulsions ultrasoniques à 40 kHz et détectera s’il y a un retour de signal ;
(3) S’il y a un retour de signal, lorsque ECHO (E) passe au niveau haut, la durée de ce niveau haut correspond au temps aller‑retour des ondes ultrasoniques. Ensuite distance mesurée = durée du niveau haut * 340 m/s * 0,5.
3. Paramètres
Tension de fonctionnement : 3‑5,5V (DC)
Courant de fonctionnement : 15 mA
Fréquence de fonctionnement : 40 kHz
Distance maximum de détection : environ 3 m
Distance minimum de détection : 2‑3 cm
Précision : jusqu’à 0,2 cm
Angle de détection : inférieur à 15 degrés
Impulsion d’entrée de déclenchement : 10 µs niveau TTL
Signal d’écho de sortie : sortie signal niveau TTL (haut), proportionnel à la portée
4. Préparation
Insérer la carte micro:bit dans le logement du keyestudio 4WD Mecanum Robot Car V2.0
Placer les batteries dans le porte‑pile
Mettre l’interrupteur d’alimentation sur ON
Connecter le micro:bit à l’ordinateur via un câble USB
Ouvrir la version hors ligne de Mu
5. Code de test
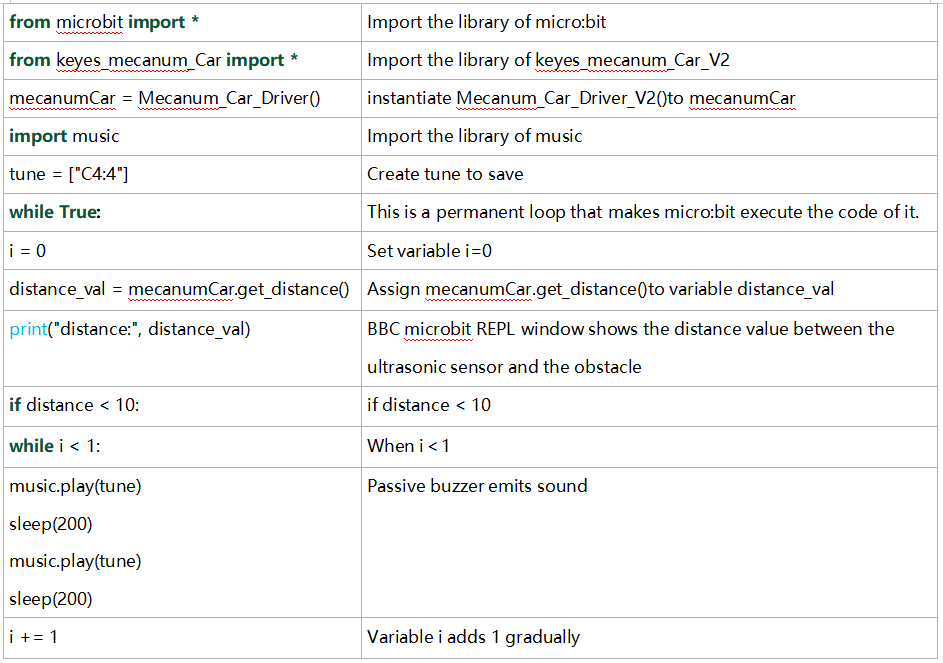
Ouvrir Mu et ouvrir le fichier “Ultrasonic Ranging.py” pour importer le code. Vous pouvez aussi saisir le code directement dans la fenêtre d’édition.
(Remarque : Tous les mots et symboles en anglais doivent être écrits en anglais.)
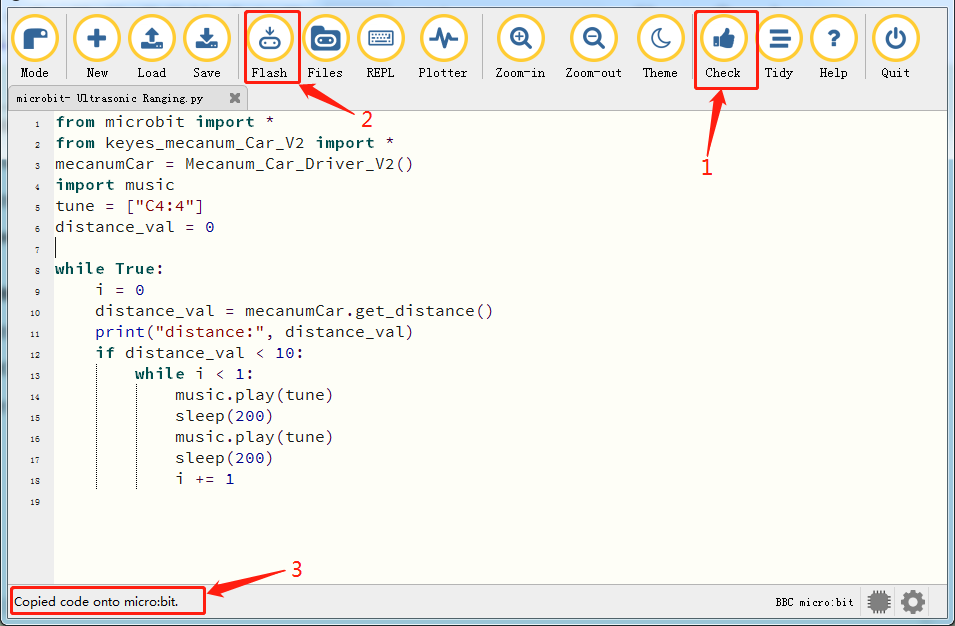
Cliquer sur “Files” pour importer le fichier de bibliothèque “keyes_mecanum_Car_V2.py” vers le micro:bit.
Cliquer sur “Check” pour vérifier les erreurs dans le code. Le programme est erroné si des soulignements et des curseurs sont affichés.
Si le code est correct, connecter le micro:bit à votre ordinateur et cliquer sur “Flash” pour télécharger le code sur la carte micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
import music
tune = ["C4:4"]
distance_val = 0
while True:
i = 0
distance_val = mecanumCar.get_distance()
print("distance:", distance_val)
if distance_val < 10:
while i < 1:
music.play(tune)
sleep(200)
music.play(tune)
sleep(200)
i += 1
6. Résultat du test
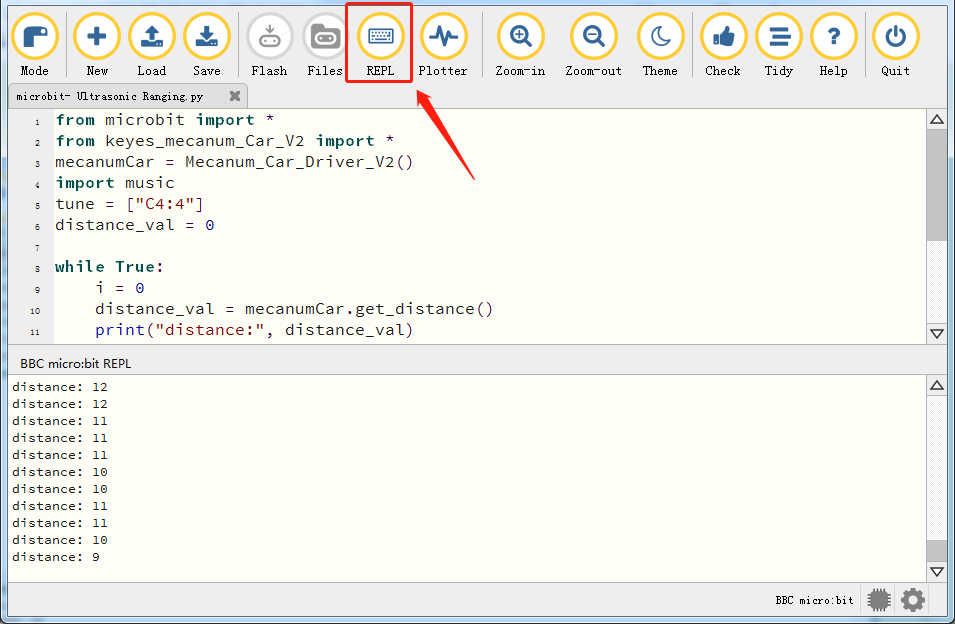
Après avoir téléchargé le code sur la carte avec succès et sans débrancher le câble USB, cliquer sur “REPL” puis appuyer sur le bouton reset.
La valeur de distance de l’obstacle sera affichée, comme indiqué ci‑dessous.
Quand la distance est inférieure à 10 cm, le buzzer passif de la voiture émettra un son.
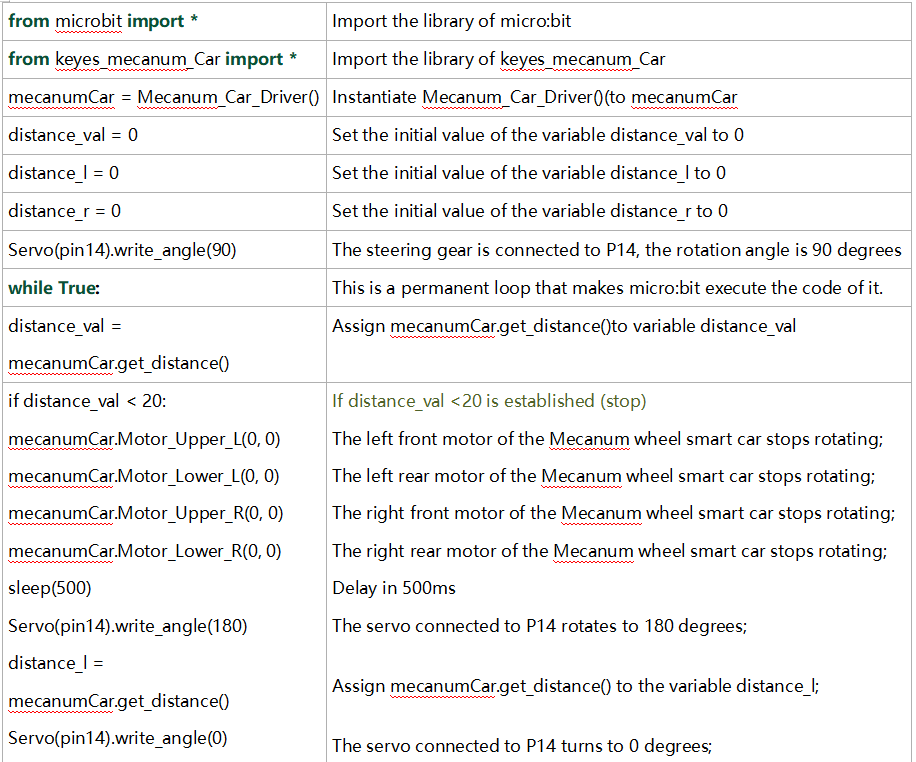
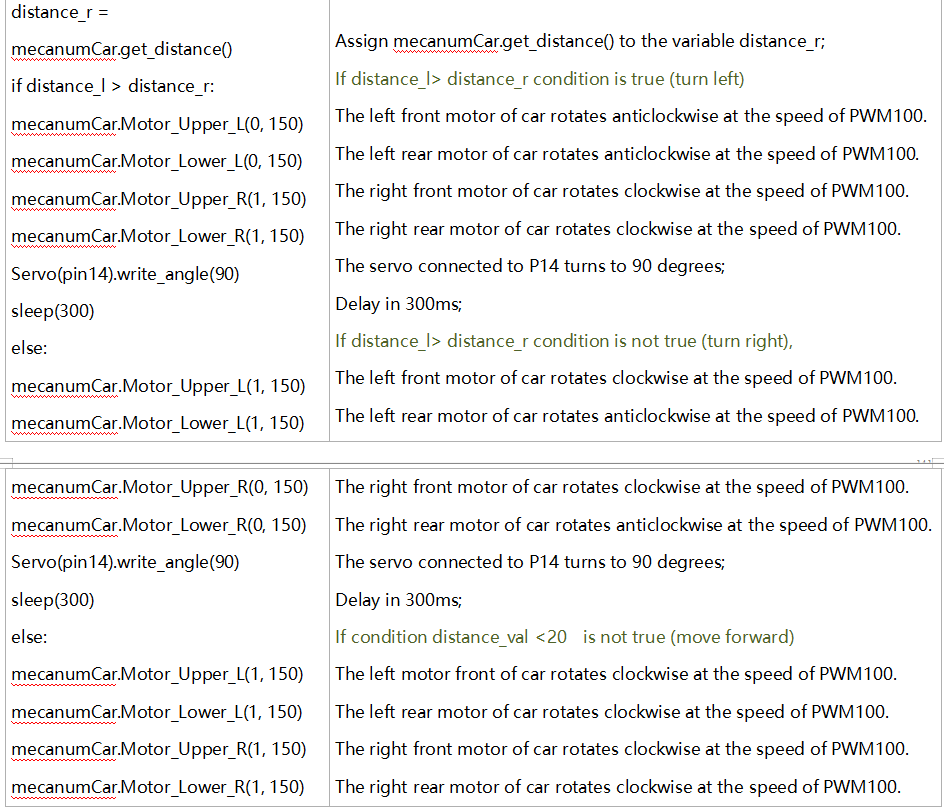
7. Explication du code
Projet 18.2:Évitement ultrasonique
1. Description
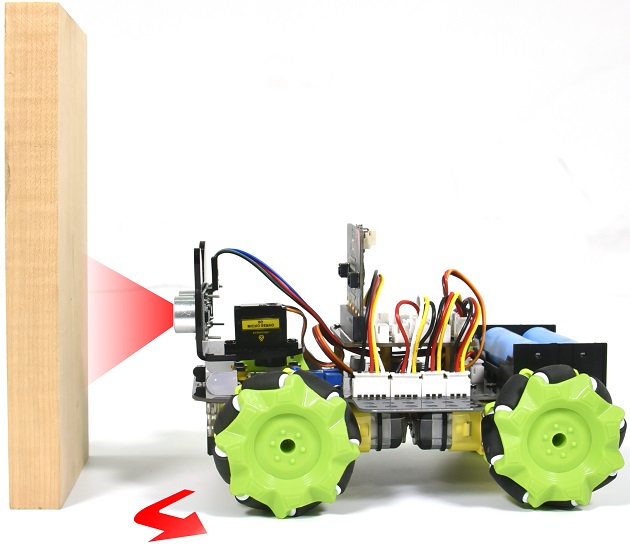
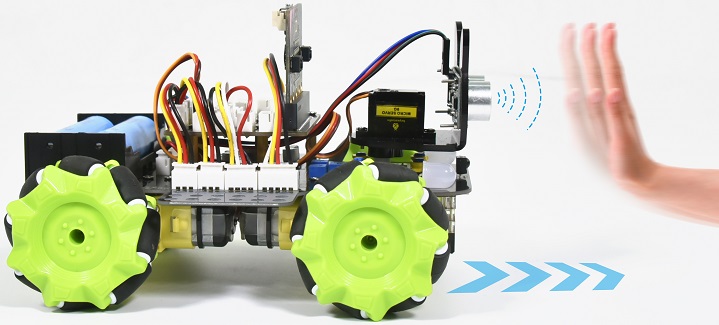
Dans ce projet, nous allons intégrer un capteur ultrasonique à une voiture pour réaliser une voiture d’évitement ultrasonique.
Le principe est de détecter la distance entre la voiture et l’obstacle via le capteur ultrasonique afin de contrôler le mouvement de la voiture.
2. Préparation
Insérer la carte micro:bit dans le logement du keyestudio 4WD Mecanum Robot Car V2.0
Placer les batteries dans le porte‑pile
Mettre l’interrupteur d’alimentation sur ON
Connecter le micro:bit à l’ordinateur via un câble USB
Ouvrir la version hors ligne de Mu
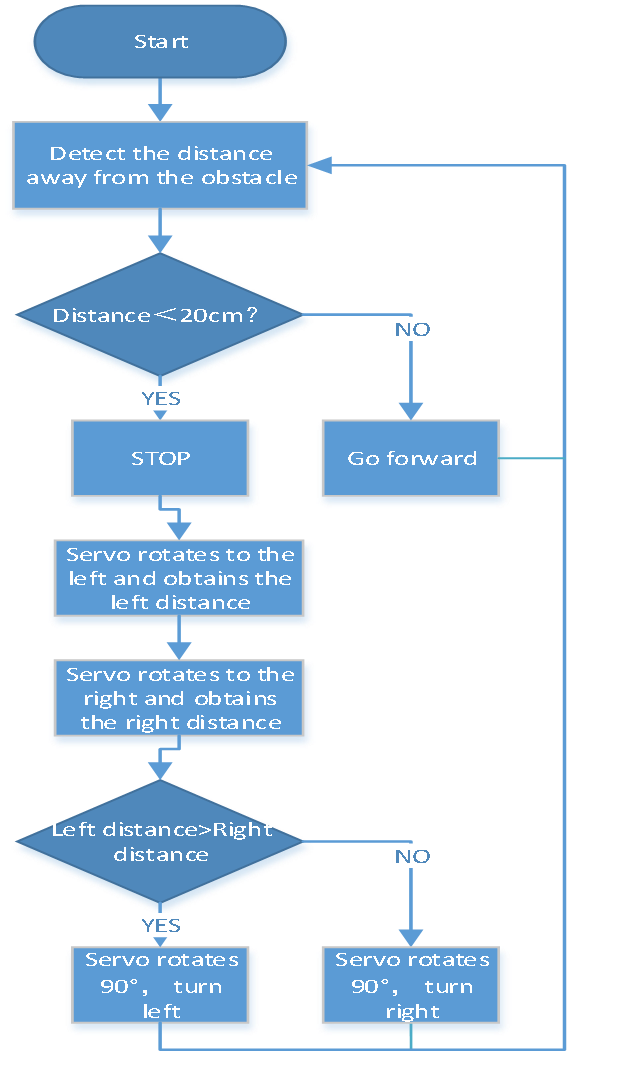
3. Diagramme de flux
4. Code de test
Ouvrir Mu et ouvrir le fichier “Ultrasonic Avoid Smart Car.py” pour importer le code. Vous pouvez aussi saisir le code directement dans la fenêtre d’édition.
(Remarque : Tous les mots et symboles en anglais doivent être écrits en anglais.)
Cliquer sur “Files” pour importer le fichier de bibliothèque “keyes_mecanum_Car_V2.py” vers le micro:bit.
Cliquer sur “Check” pour vérifier les erreurs dans le code. Le programme est erroné si des soulignements et des curseurs sont affichés.
Si le code est correct, connecter le micro:bit à votre ordinateur et cliquer sur “Flash” pour télécharger le code sur la carte micro:bit.
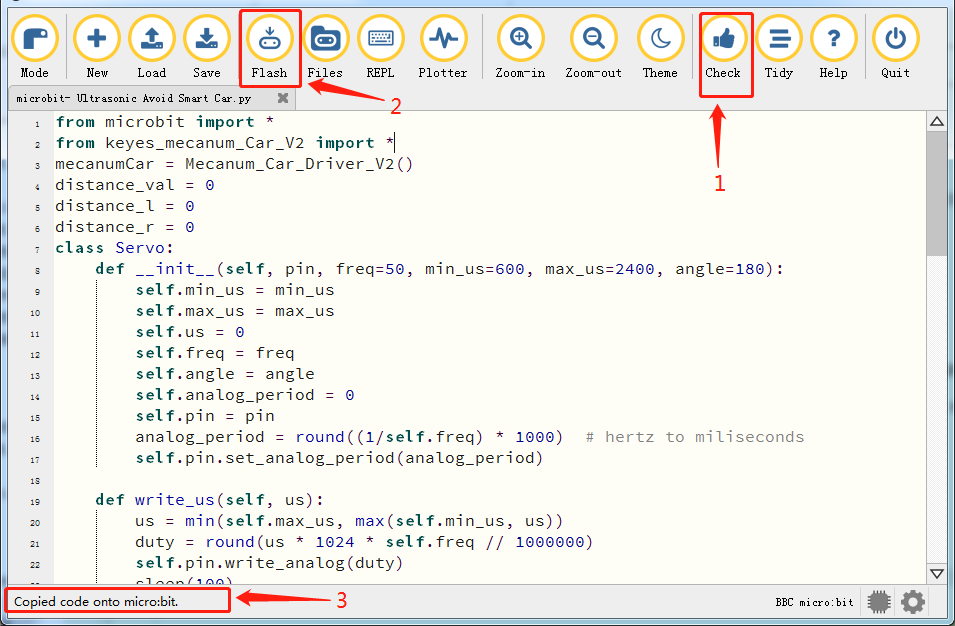
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
distance_val = 0
distance_l = 0
distance_r = 0
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
while True:
distance_val = mecanumCar.get_distance()
if distance_val < 20:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
sleep(500)
Servo(pin14).write_angle(180)
sleep(500)
distance_l = mecanumCar.get_distance()
sleep(500)
Servo(pin14).write_angle(0)
sleep(500)
distance_r = mecanumCar.get_distance()
sleep(500)
if distance_l > distance_r:
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(0, 100)
mecanumCar.Motor_Lower_R(0, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
5. Résultat du test
Après avoir téléchargé le code sur la carte avec succès, alimentation externe (mettre l’interrupteur DIP sur ON), et appuyer sur le bouton reset du micro:bit.
Lorsque la distance de l’obstacle est supérieure à 20 cm, la voiture avance ; dans le cas contraire, la voiture tourne à gauche.
6. Explication du code
Projet 18.3:Suiveur ultrasonique
1. Description
Dans la leçon précédente, nous avons appris le principe de base du capteur de suivi de ligne. Ensuite, nous allons combiner le capteur ultrasonique avec la voiture pour réaliser une voiture suiveuse ultrasonique.
Le capteur ultrasonique détecte la distance de l’obstacle et contrôle l’état de mouvement de la voiture.
2. Préparation
Insérer la carte micro:bit dans le logement du keyestudio 4WD Mecanum Robot Car V2.0
Placer les batteries dans le porte‑pile
Mettre l’interrupteur d’alimentation sur ON
Connecter le micro:bit à l’ordinateur via un câble USB
Ouvrir la version hors ligne de Mu
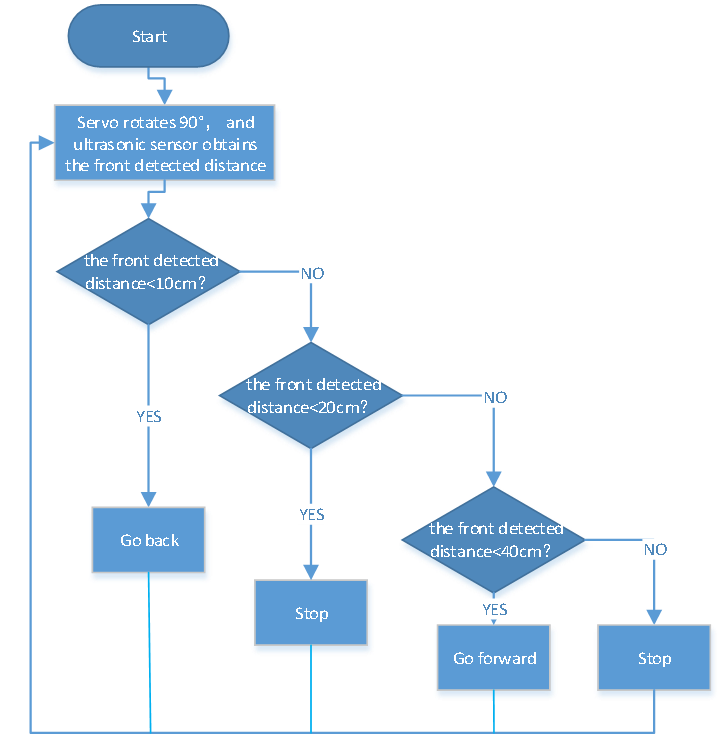
2. Diagramme de flux
3. Code de test
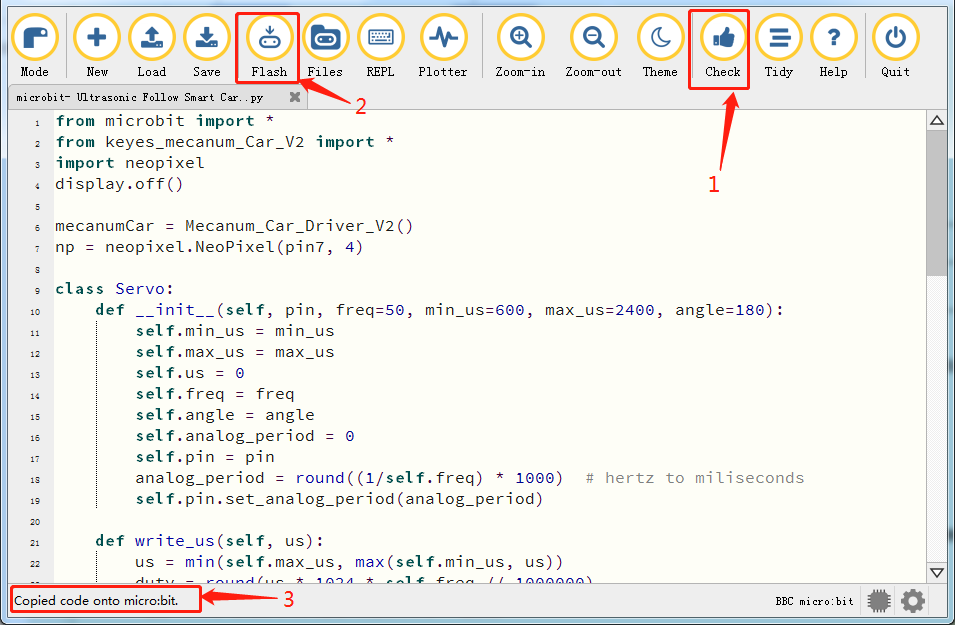
Ouvrir Mu et ouvrir le fichier “Ultrasonic Follow Smart Car.py” pour importer le code. Vous pouvez aussi saisir le code directement dans la fenêtre d’édition.
(Remarque : Tous les mots et symboles en anglais doivent être écrits en anglais.)
Cliquer sur “Files” pour importer le fichier de bibliothèque “keyes_mecanum_Car_V2.py” vers le micro:bit.
Cliquer sur “Check” pour vérifier les erreurs dans le code. Le programme est erroné si des soulignements et des curseurs sont affichés.
Si le code est correct, connecter le micro:bit à votre ordinateur et cliquer sur “Flash” pour télécharger le code sur la carte micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
import neopixel
display.off()
mecanumCar = Mecanum_Car_Driver_V2()
np = neopixel.NeoPixel(pin7, 4)
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
while True:
distance_val = 0
distance_val = mecanumCar.get_distance()
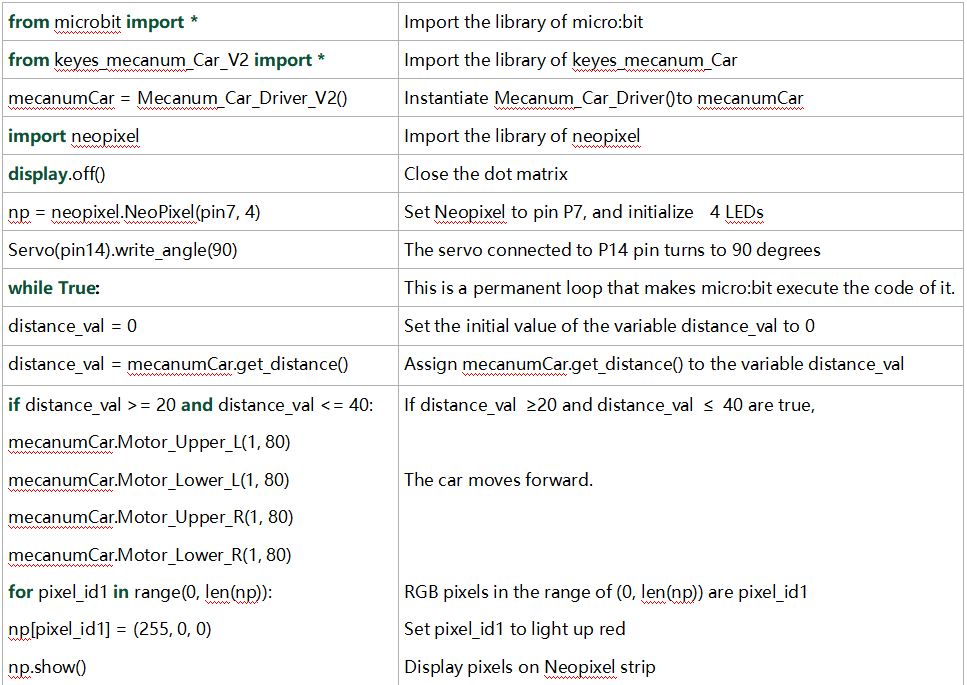
if distance_val >= 20 and distance_val <= 40:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 0, 0)
np.show()
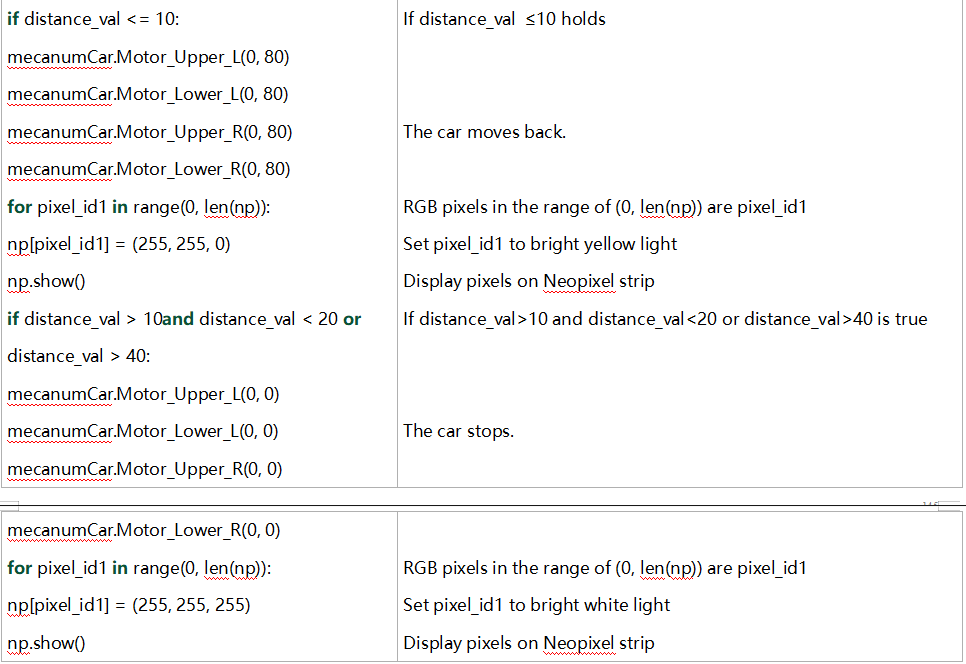
if distance_val <= 10:
mecanumCar.Motor_Upper_L(0, 80)
mecanumCar.Motor_Lower_L(0, 80)
mecanumCar.Motor_Upper_R(0, 80)
mecanumCar.Motor_Lower_R(0, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 0)
np.show()
if distance_val > 10 and distance_val < 20 or distance_val > 40:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 255)
np.show()
4. Résultat du test
Après avoir téléchargé le code sur la carte avec succès, alimentation externe (mettre l’interrupteur DIP sur ON), et appuyer sur le bouton reset du micro:bit.
La voiture pourra suivre l’obstacle en mouvement et les 4 LED RGB WS2812 afficheront différentes couleurs.
Remarque : l’obstacle ne peut se déplacer que devant la voiture.
5. Explication du code