L’installazione del Keyestudio 4WD Mecanum Robot Car V2.0
Passo 1
Componenti necessari:
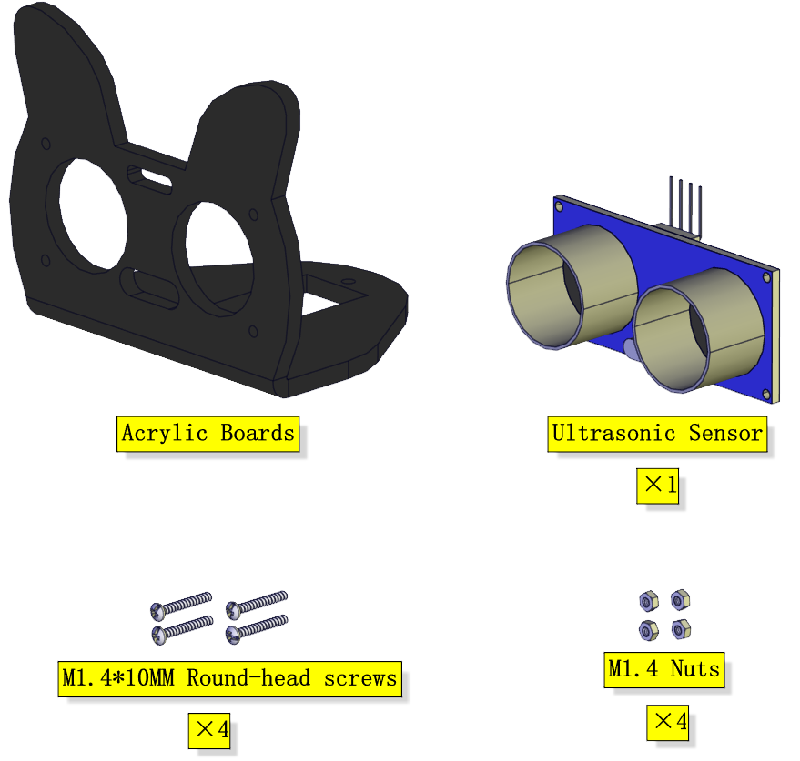
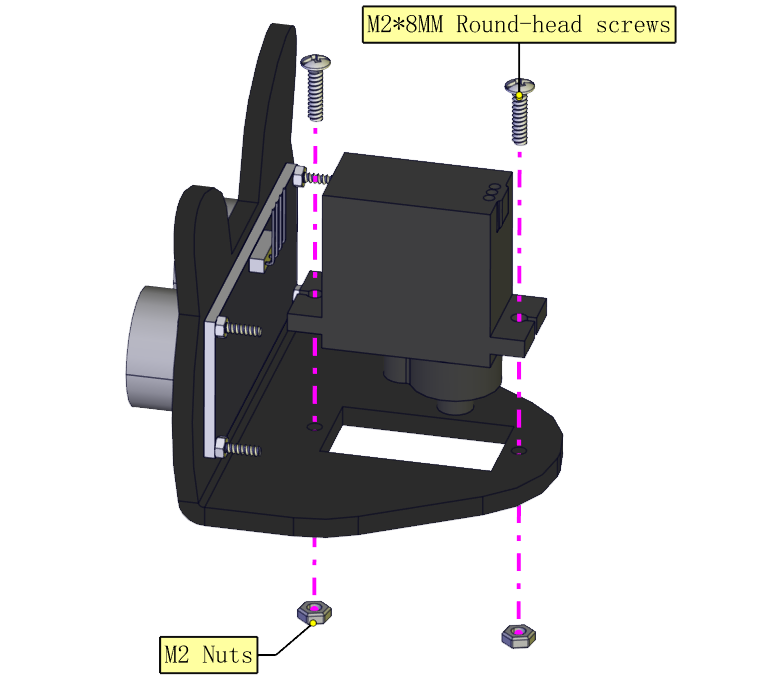
Diagramma di installazione:
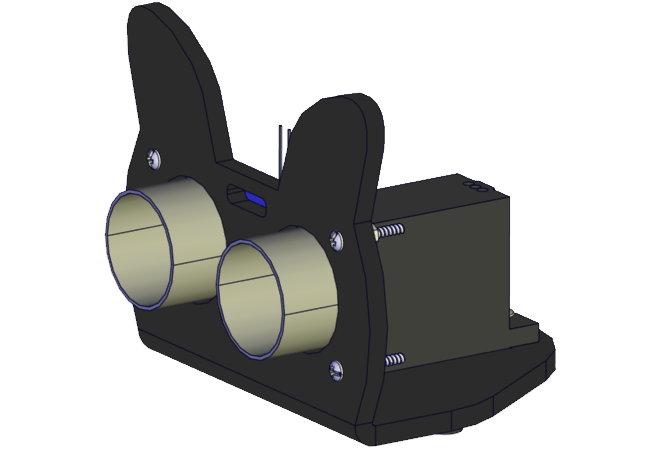
Prototipo:
Passo 2
Componenti necessari:
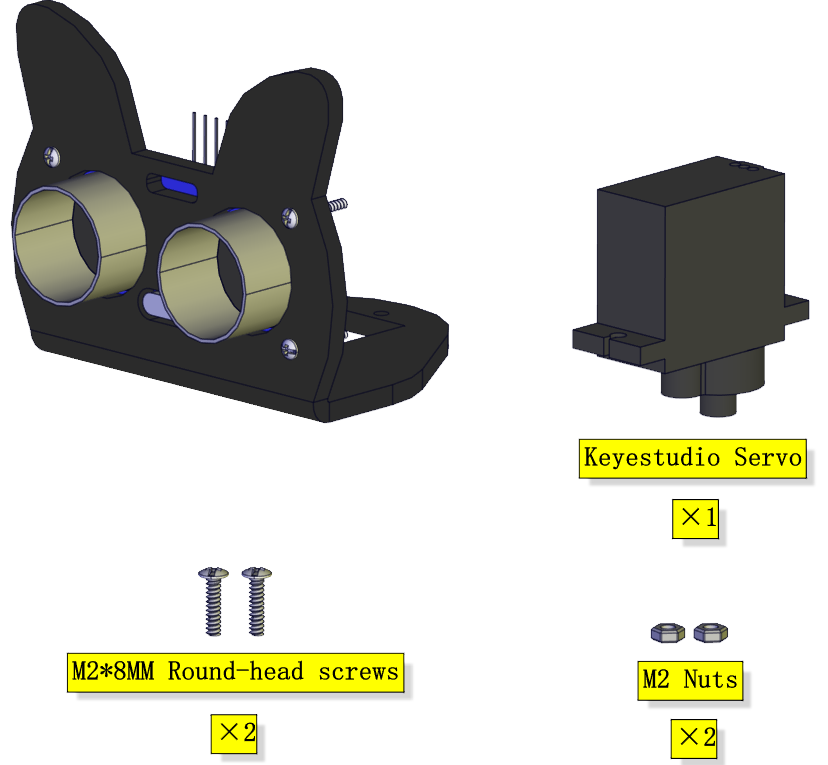
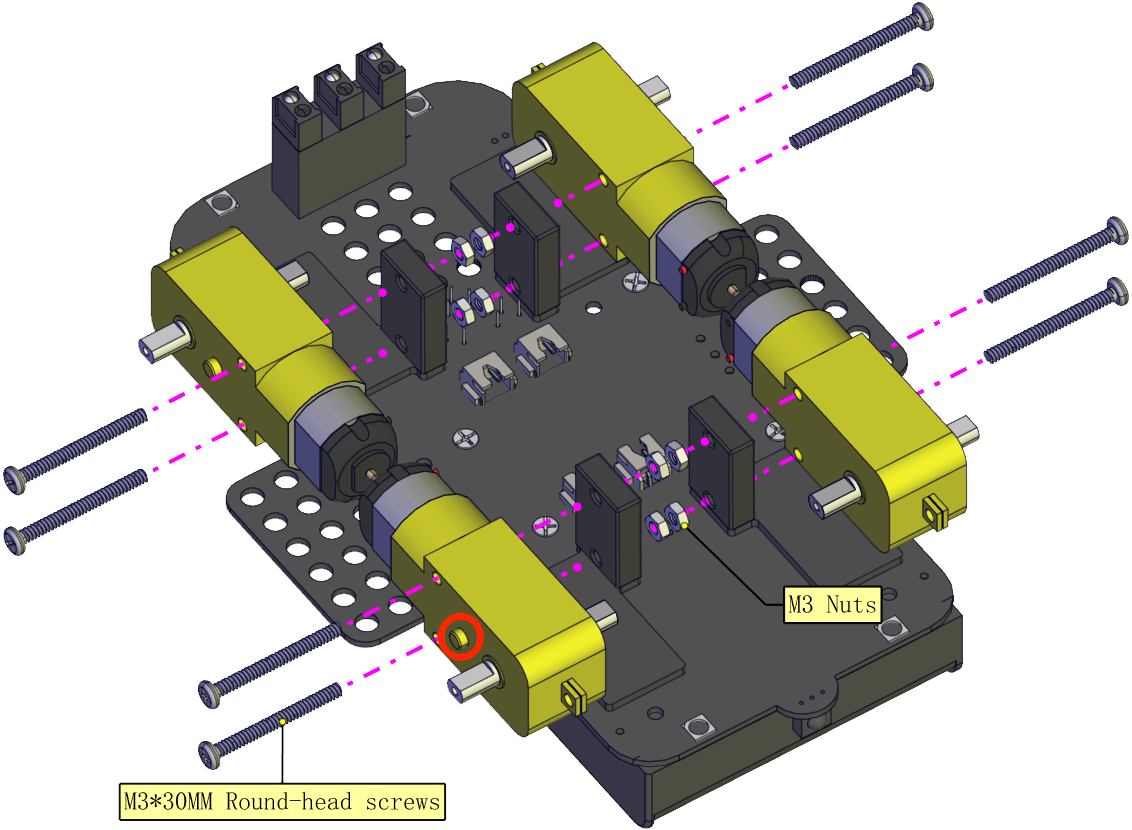
Diagramma di installazione:
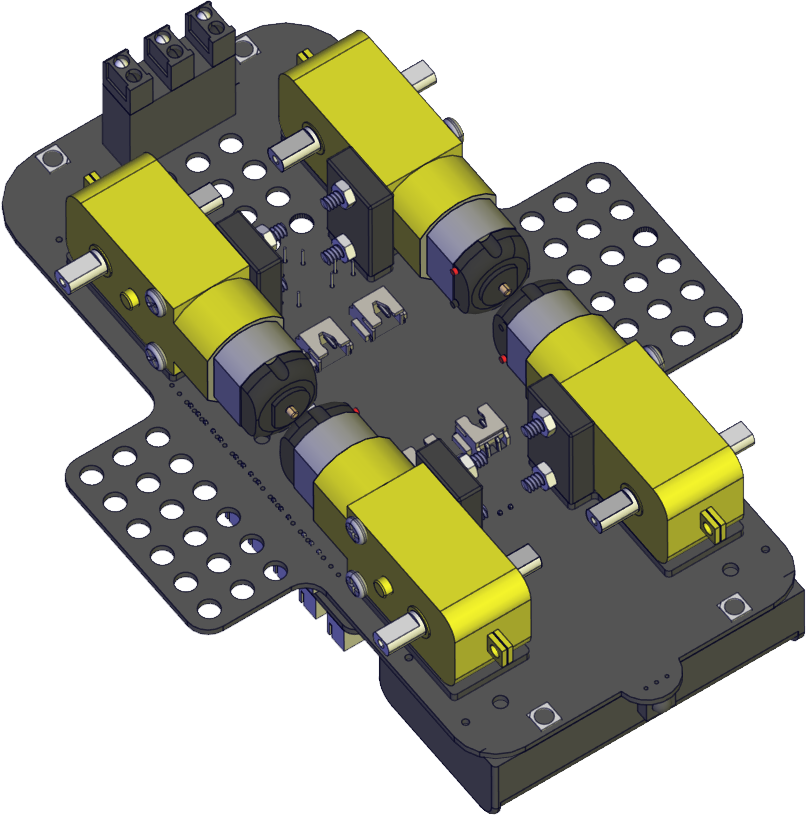
Prototipo:
Passo 3
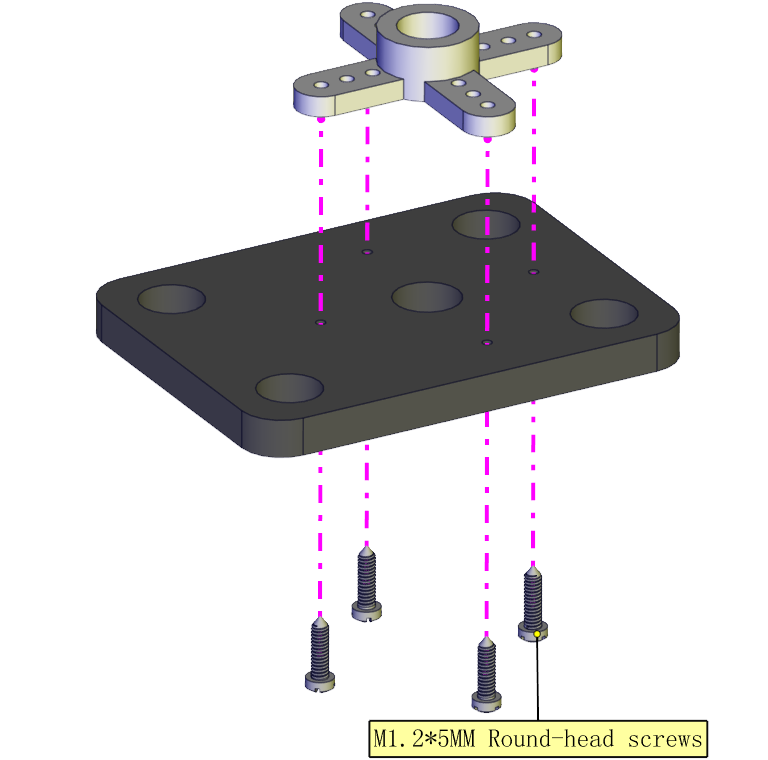
Componenti necessari:
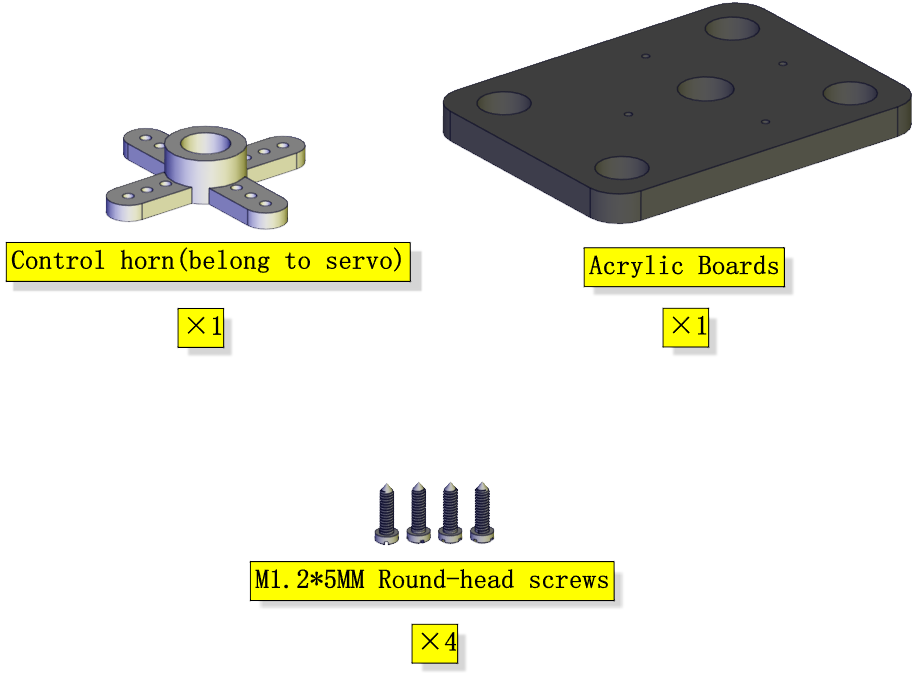
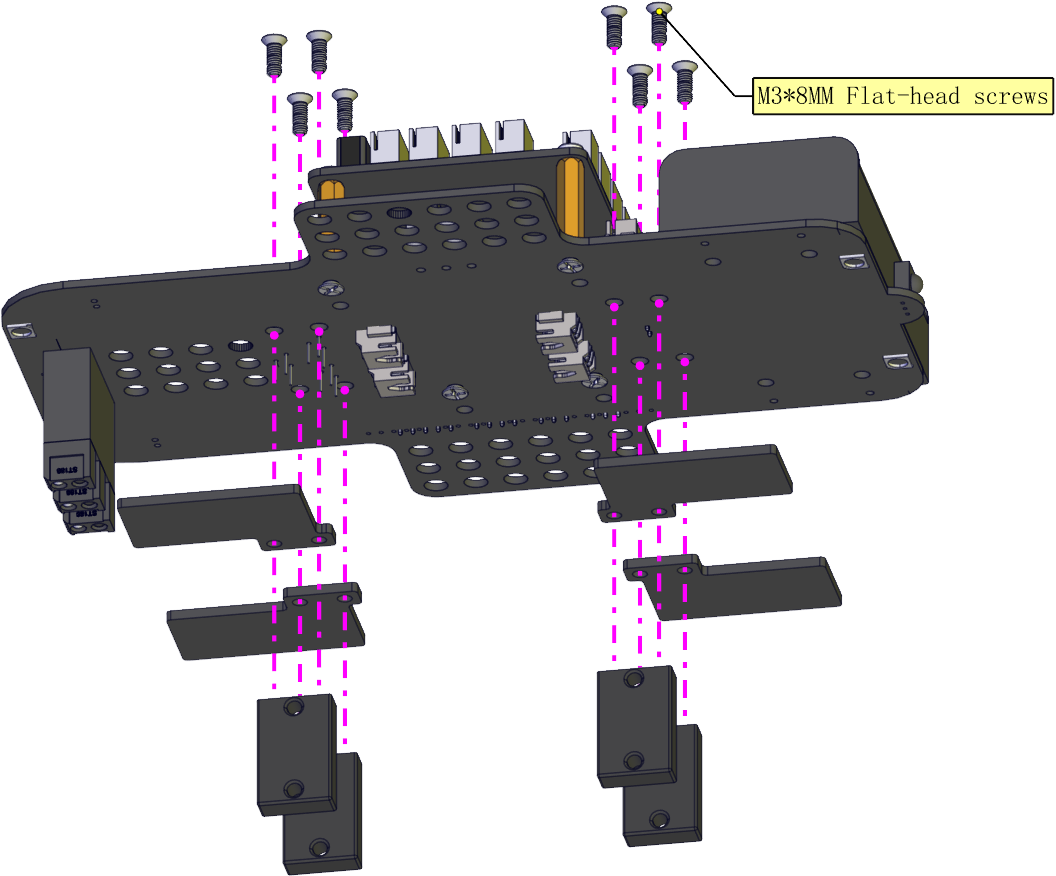
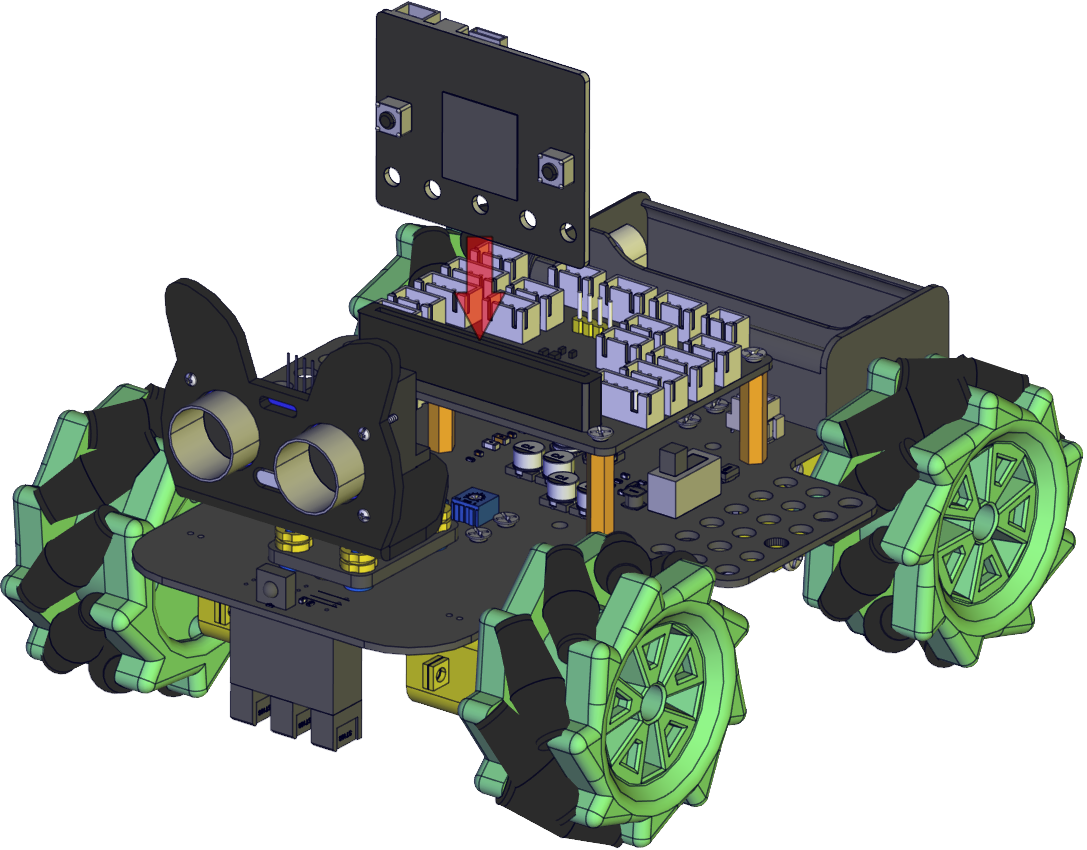
Diagramma di installazione:
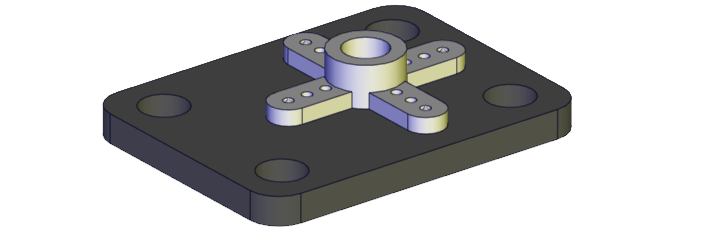
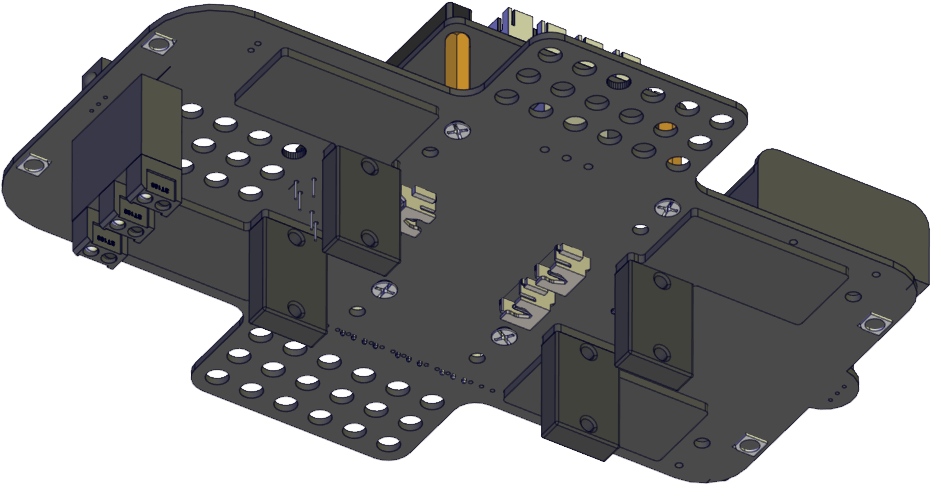
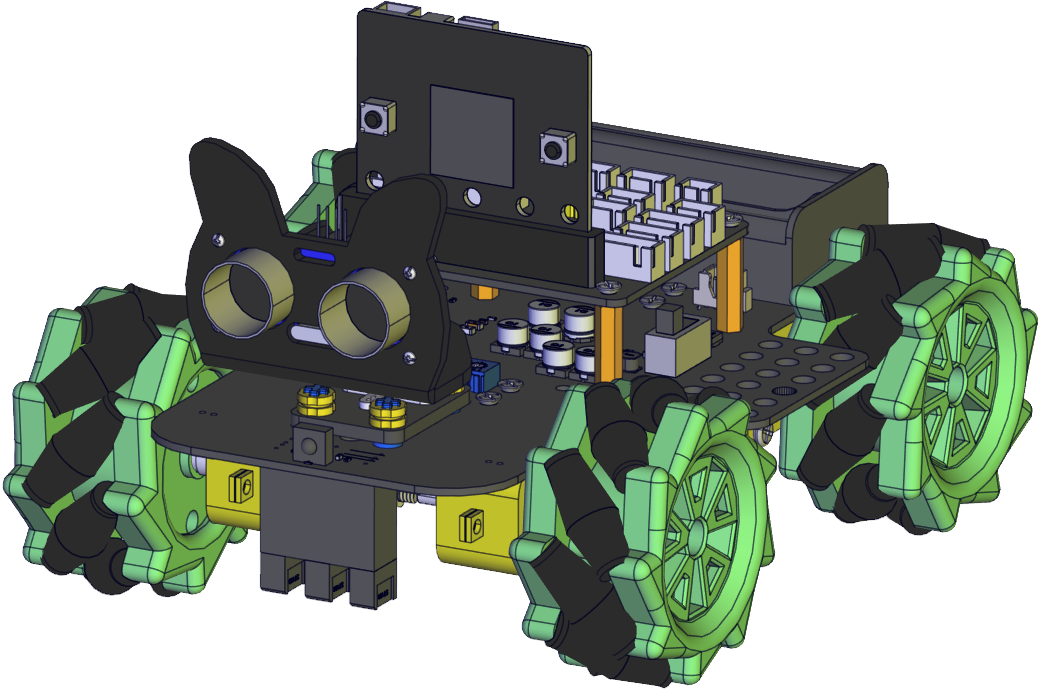
Prototipo:
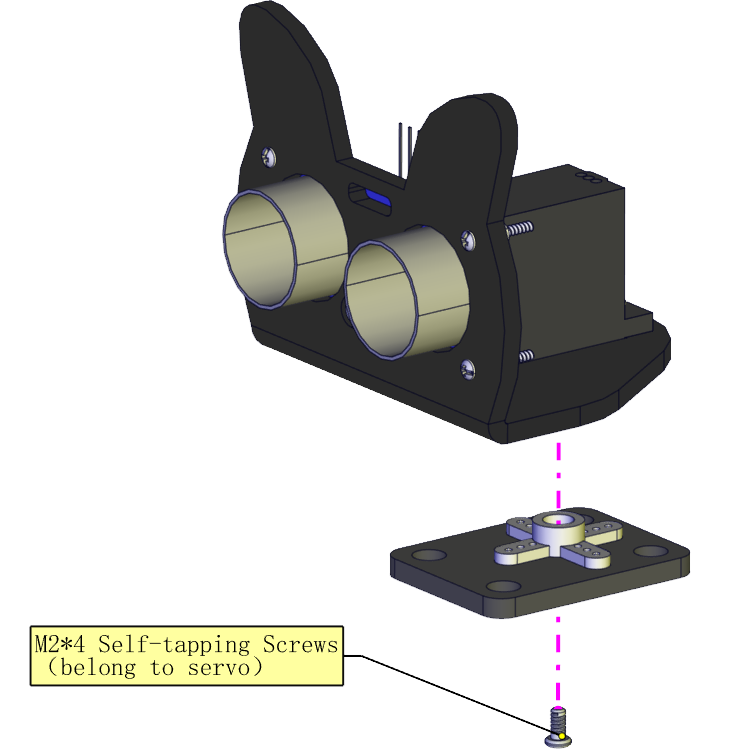
Passo 4
(regolare prima l’angolo del servo)
Regolare l’angolo del servo a 90 gradi.
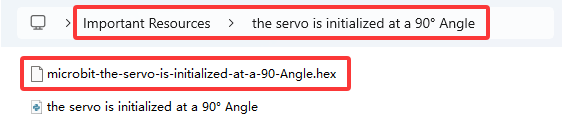
Metodo 1: codice MakeCode
⚠️Nota speciale: Prima di scrivere il codice e caricarlo, è necessario conoscere l’IDE MakeCode e aggiungere i file della libreria. Vai al link: Get Started with makecode

Il codice MakeCode sopra è fornito nei materiali. Apri il codice di regolazione del servo e scrivilo sulla scheda microbit del 4WD Mecanum Robot Car V2.0, e alimentalo tramite cavo micro USB o alimentatore esterno (imposta il DIP switch su ON). Fatto. Il codice si trova nella posizione mostrata nella figura:
Metodo 2:codice Python
⚠️Nota speciale: Prima di scrivere il codice e caricarlo, è necessario installare Mu IDE e aggiungere i file della libreria. Vai al link: Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
Componenti necessari:
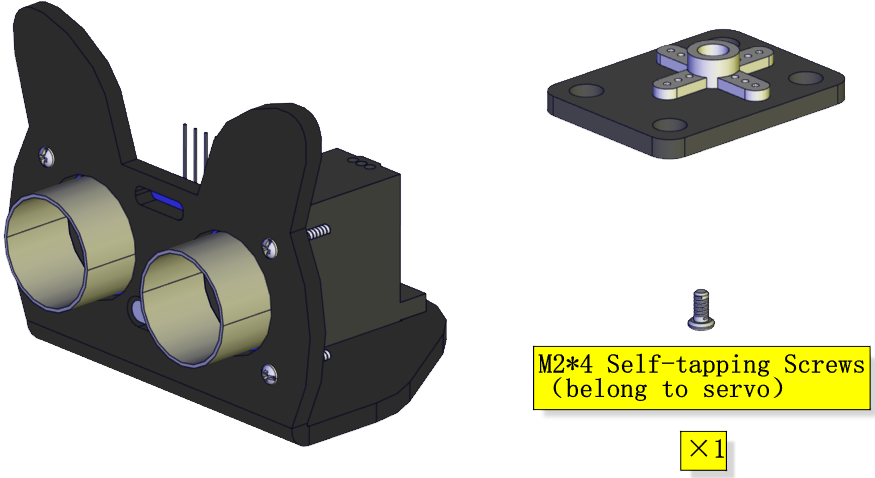
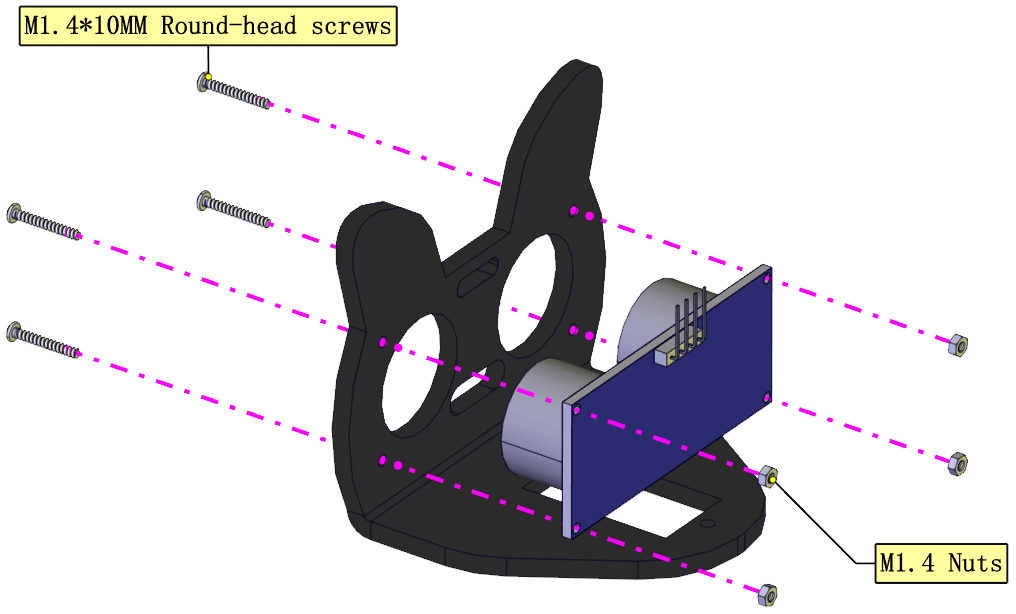
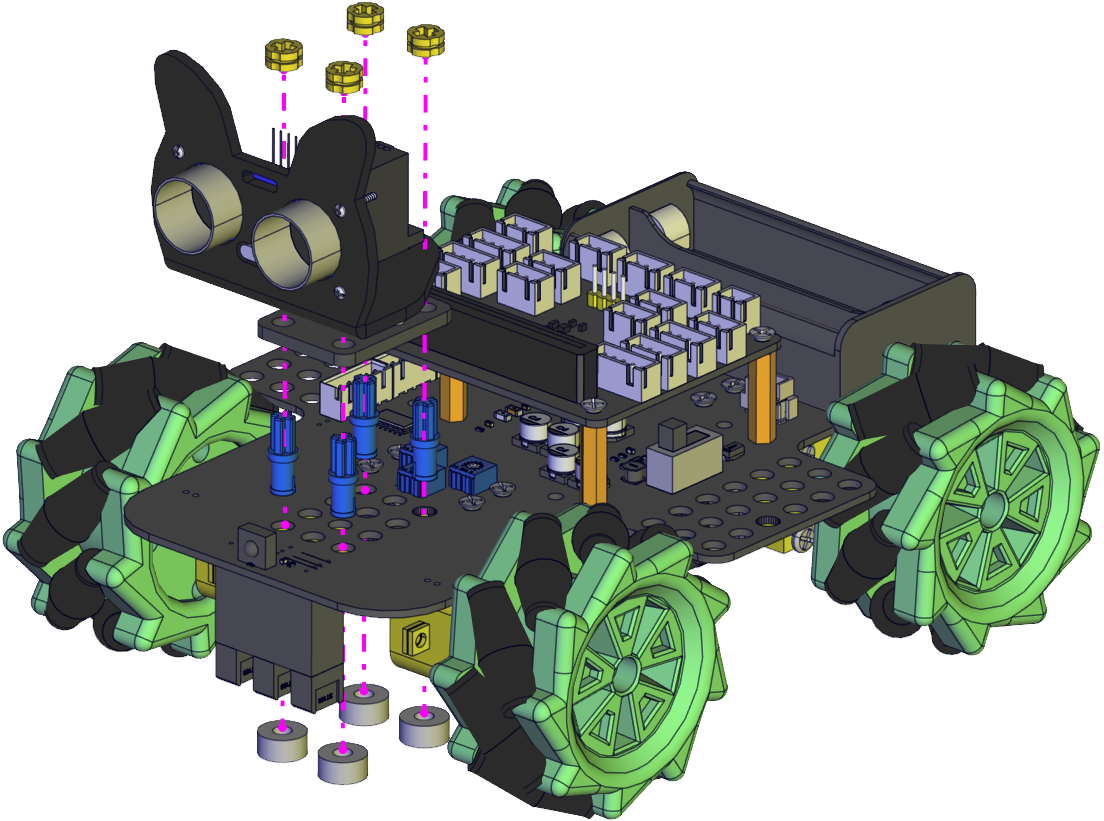
Diagramma di installazione: (prestare attenzione alla direzione di montaggio)
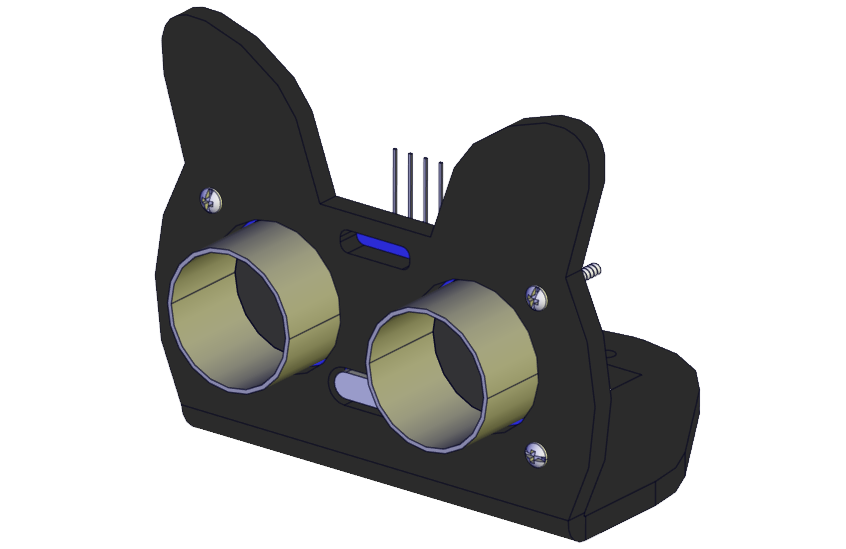
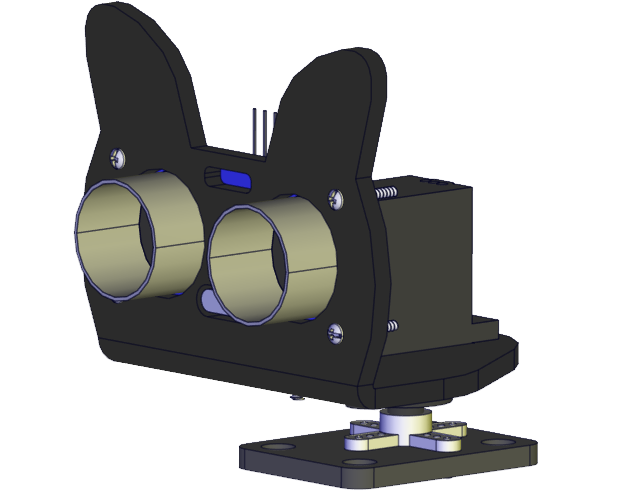
Prototipo:
Passo 5
Componenti necessari:
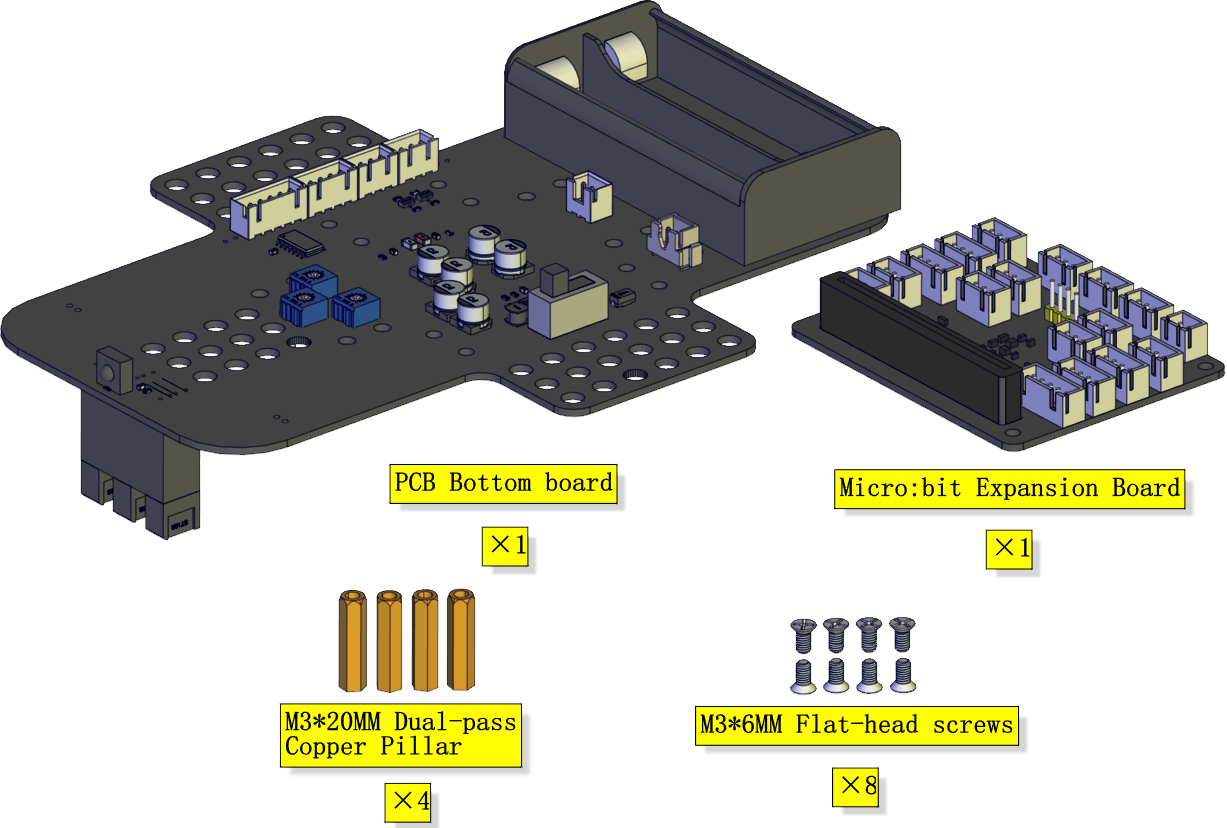
Diagramma di installazione:
Prototipo:
Passo 6
Componenti necessari:
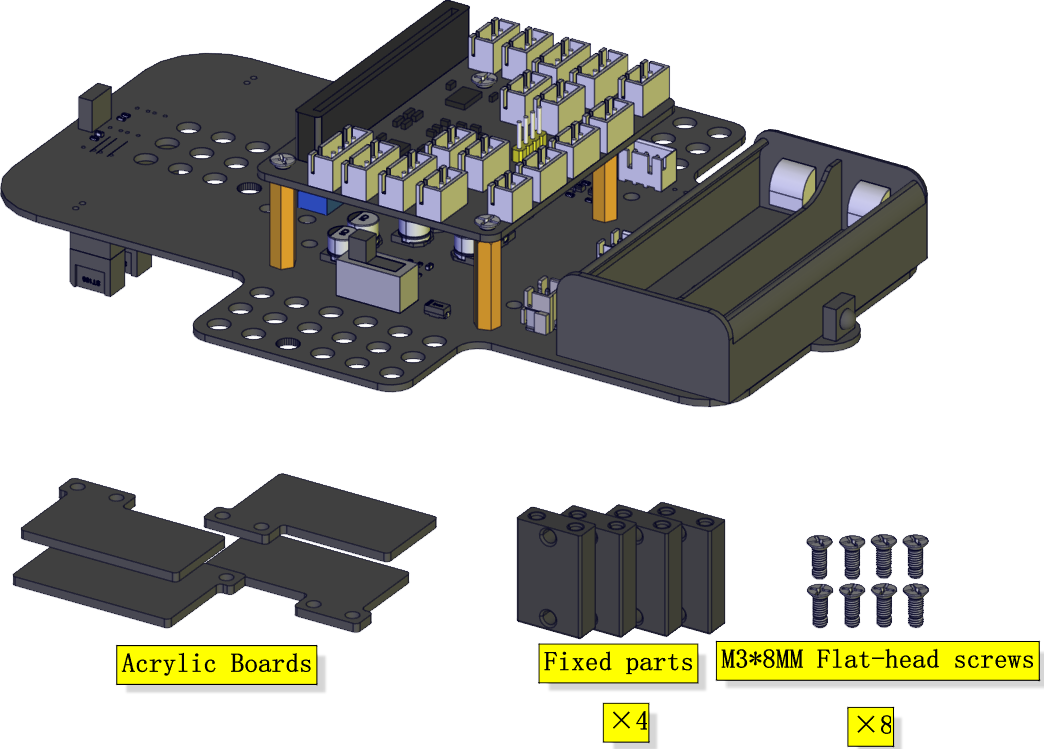
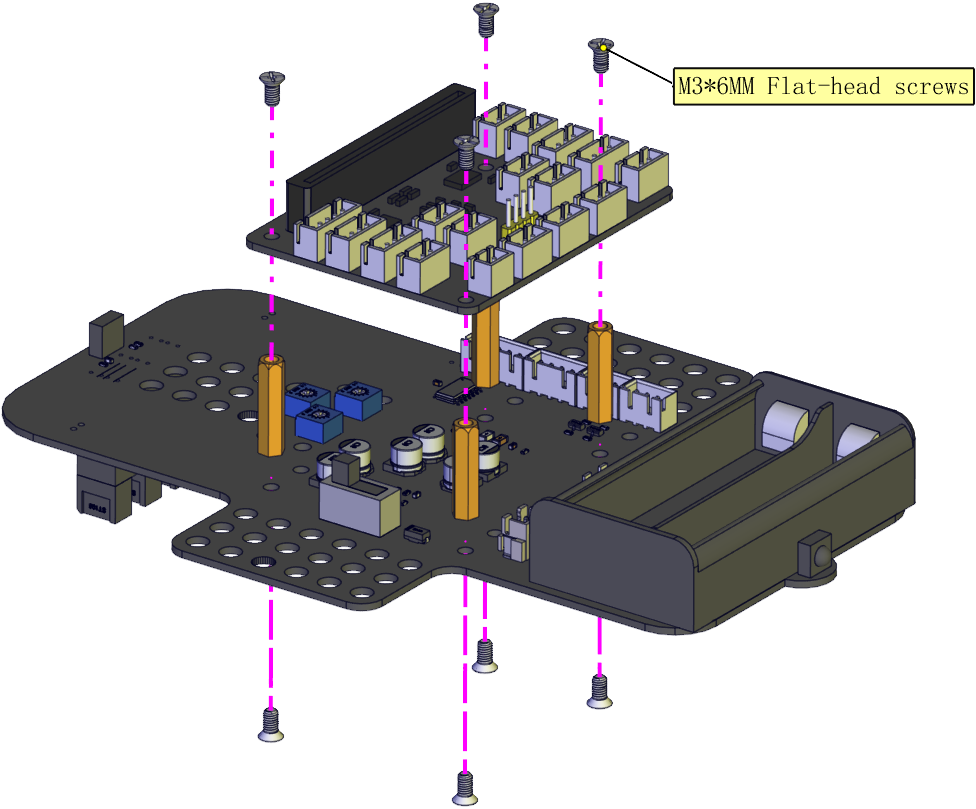
Diagramma di installazione:
Prototipo:
Passo 7
Componenti necessari:
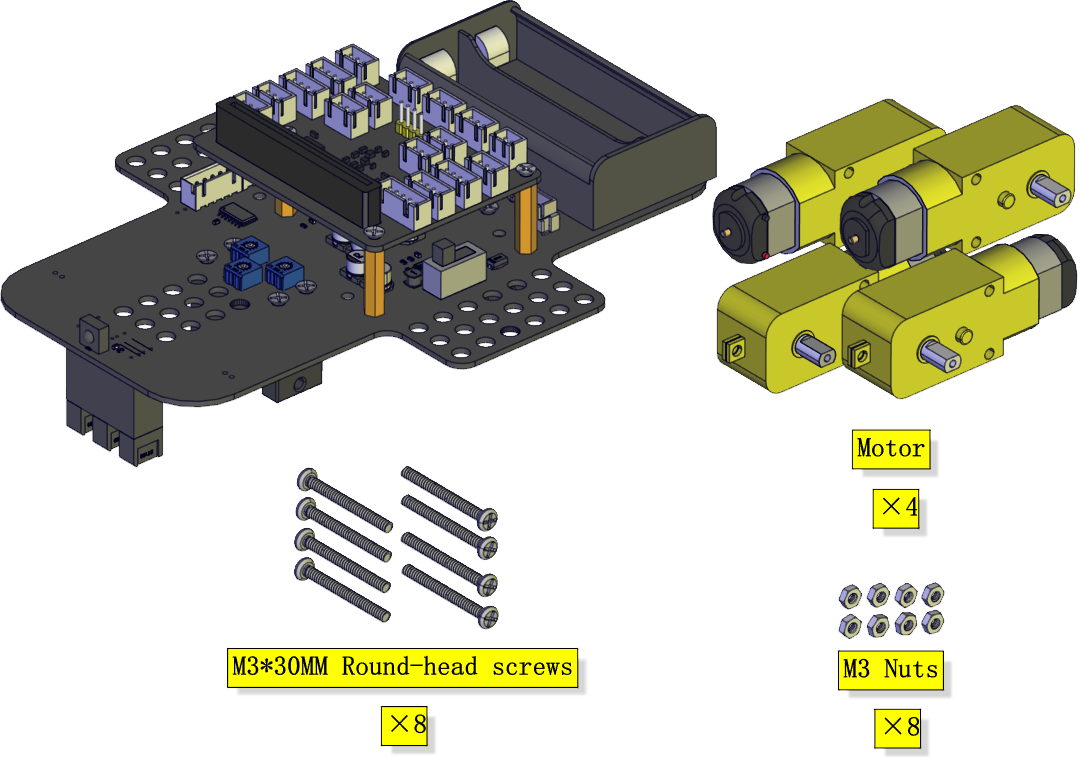
Diagramma di installazione: (prestare attenzione alla direzione del motore)
Prototipo:
Passo 8
Componenti necessari:
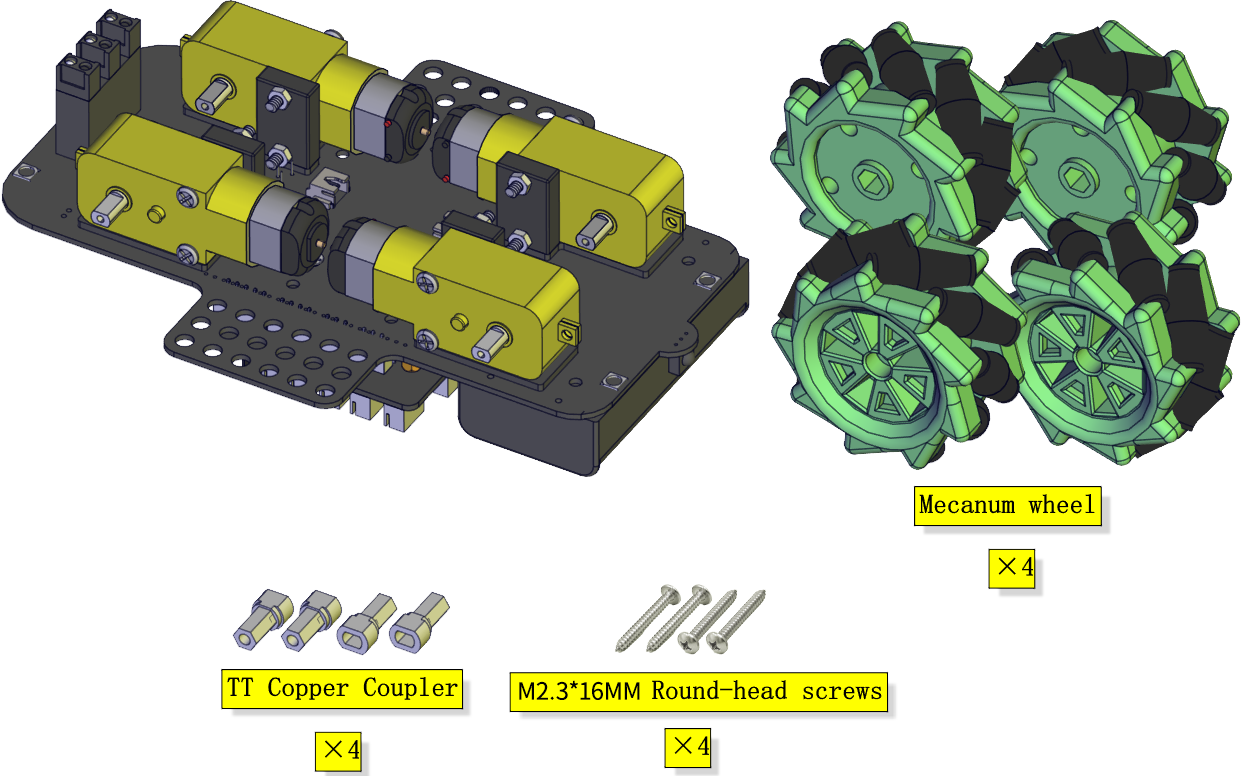
Diagramma di installazione: (prestare attenzione alla direzione di montaggio della ruota mecanum)
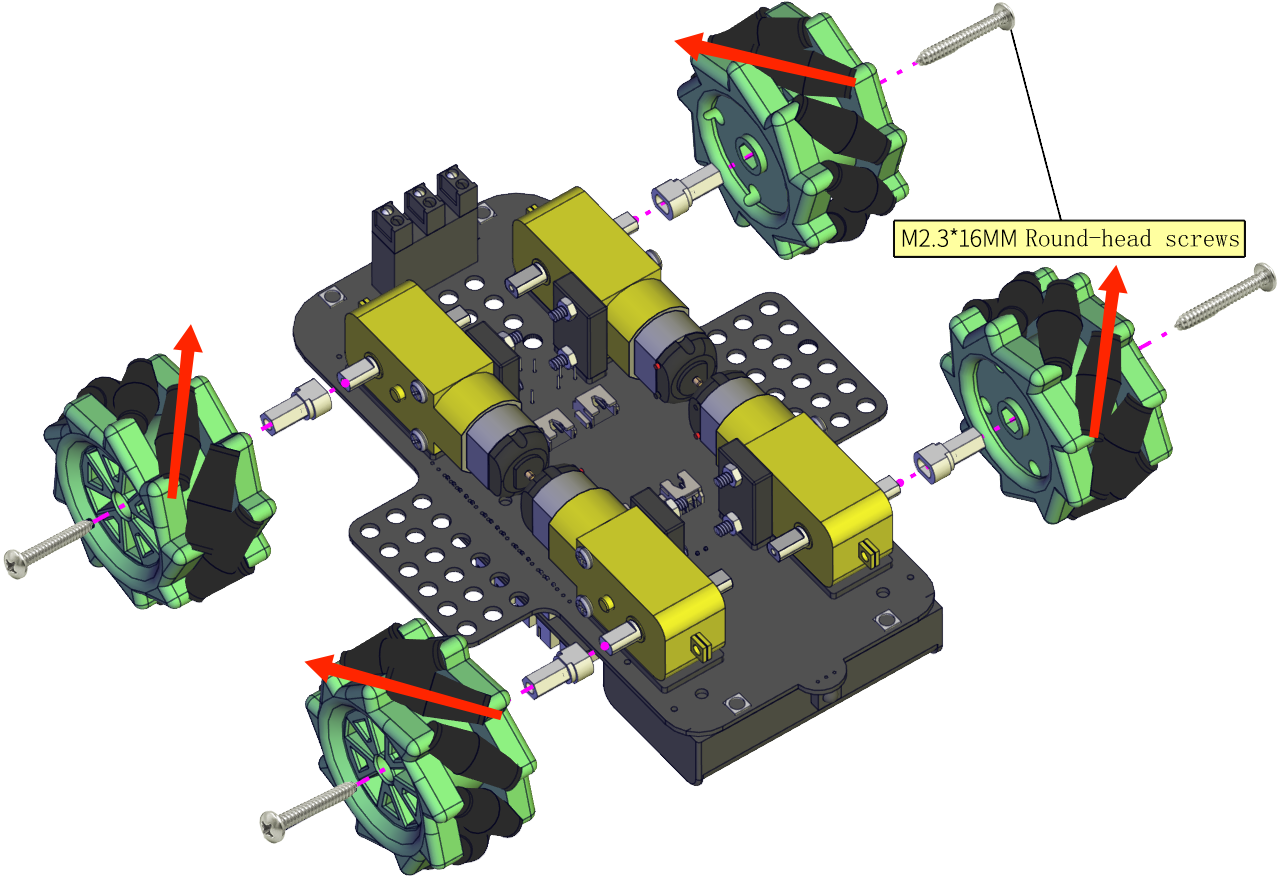
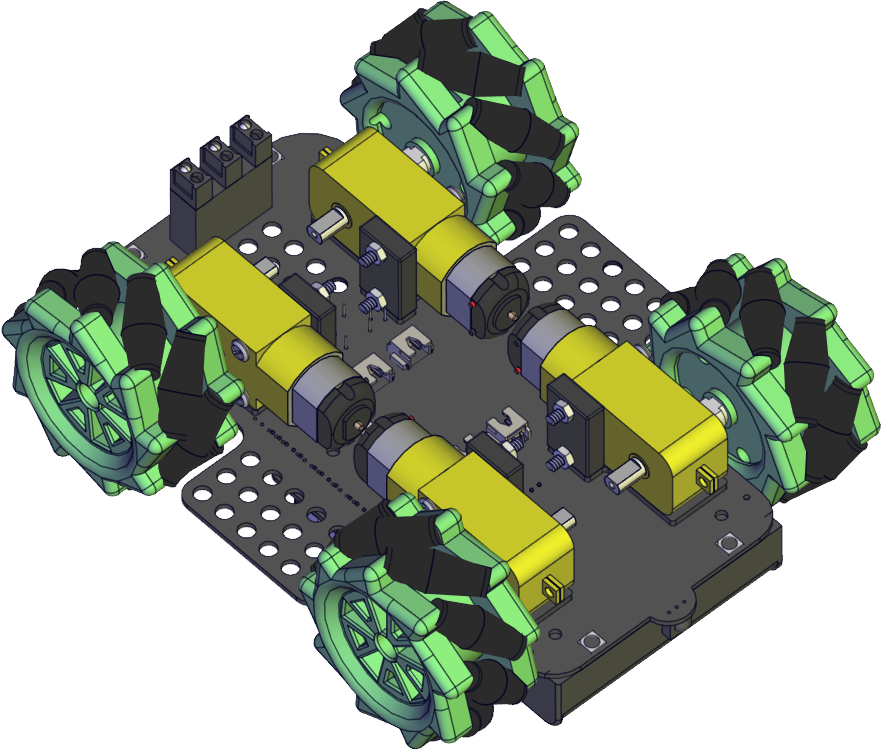
Prototipo:
Passo 9
Componenti necessari:
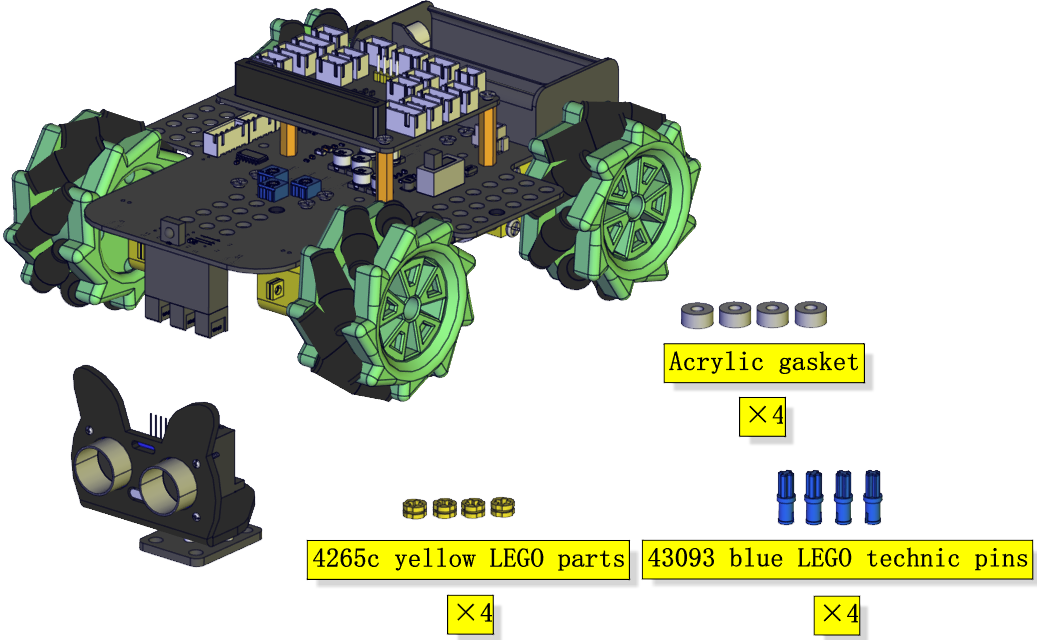
Diagramma di installazione:
Prototipo:
Passo 10
Componenti necessari:
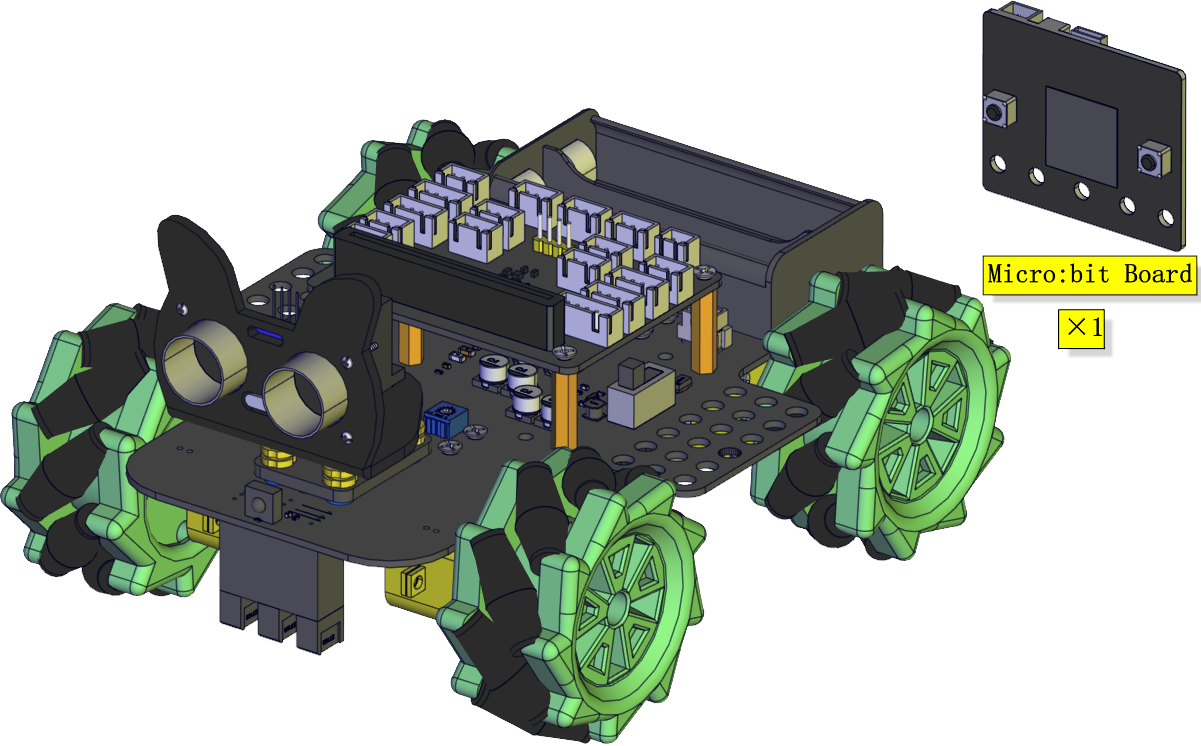
Diagramma di installazione:
Prototipo:
Schema elettrico
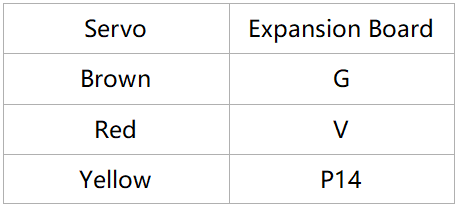
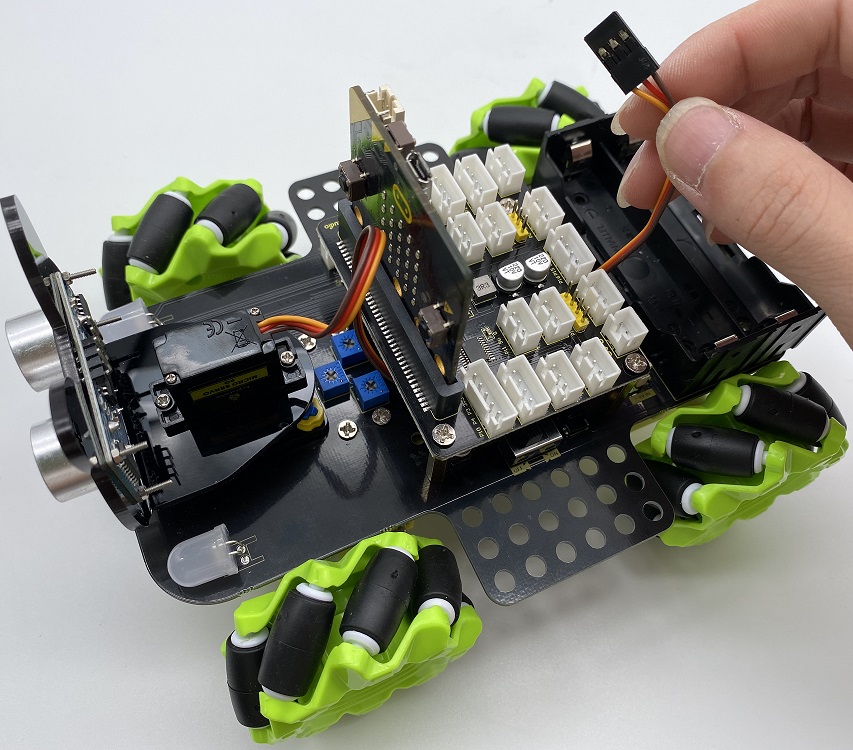
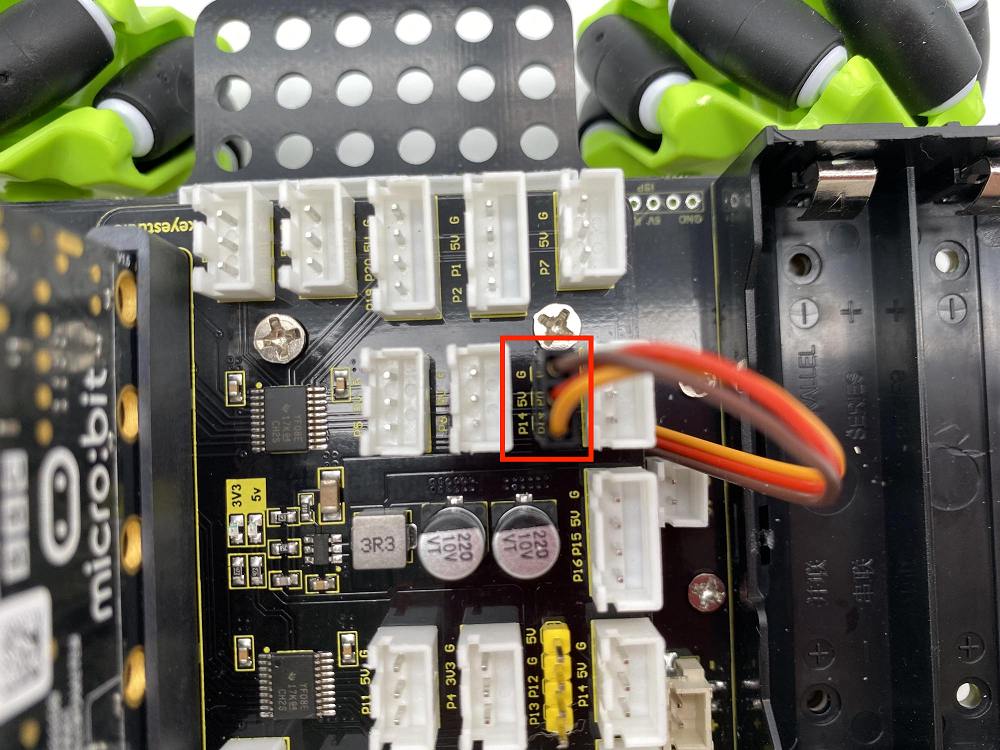
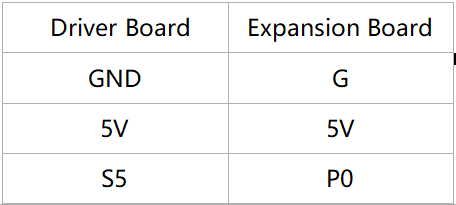
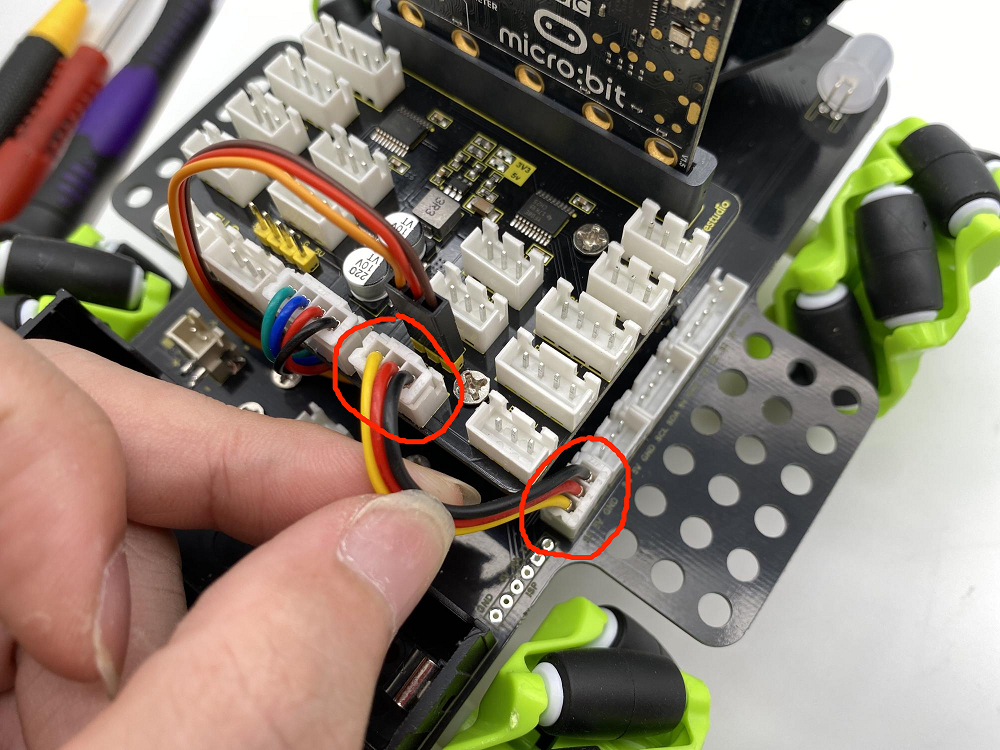
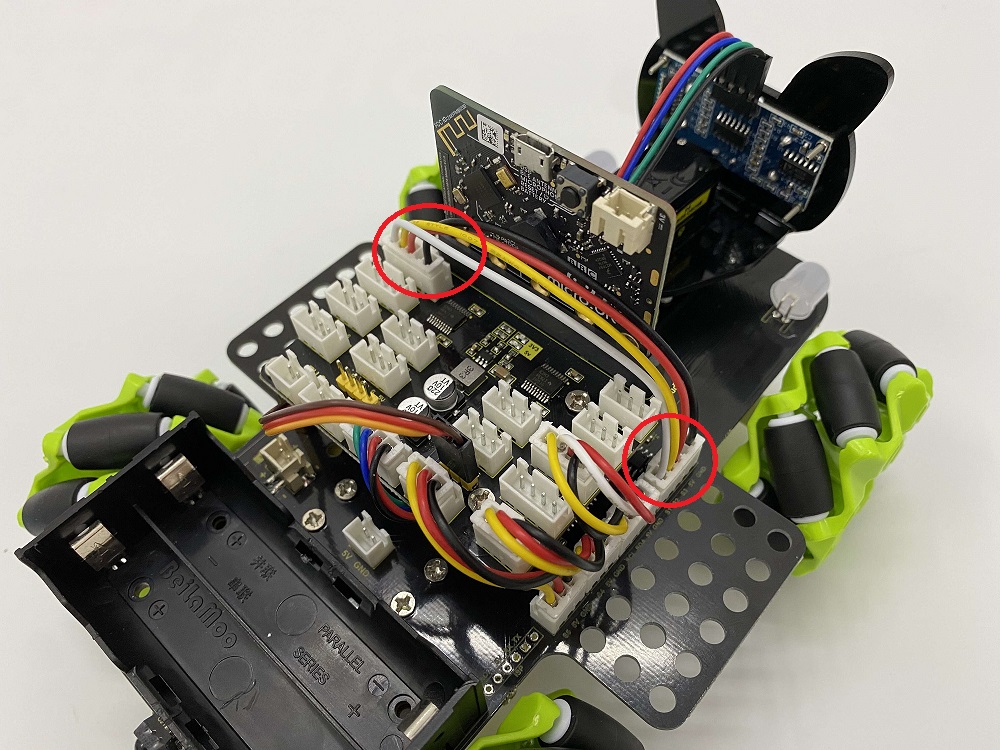
Il cablaggio del servo:
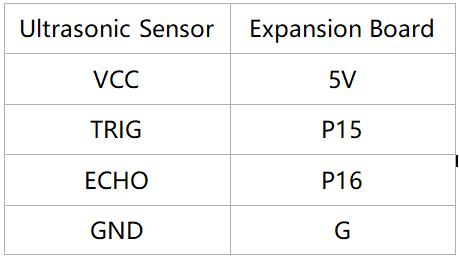
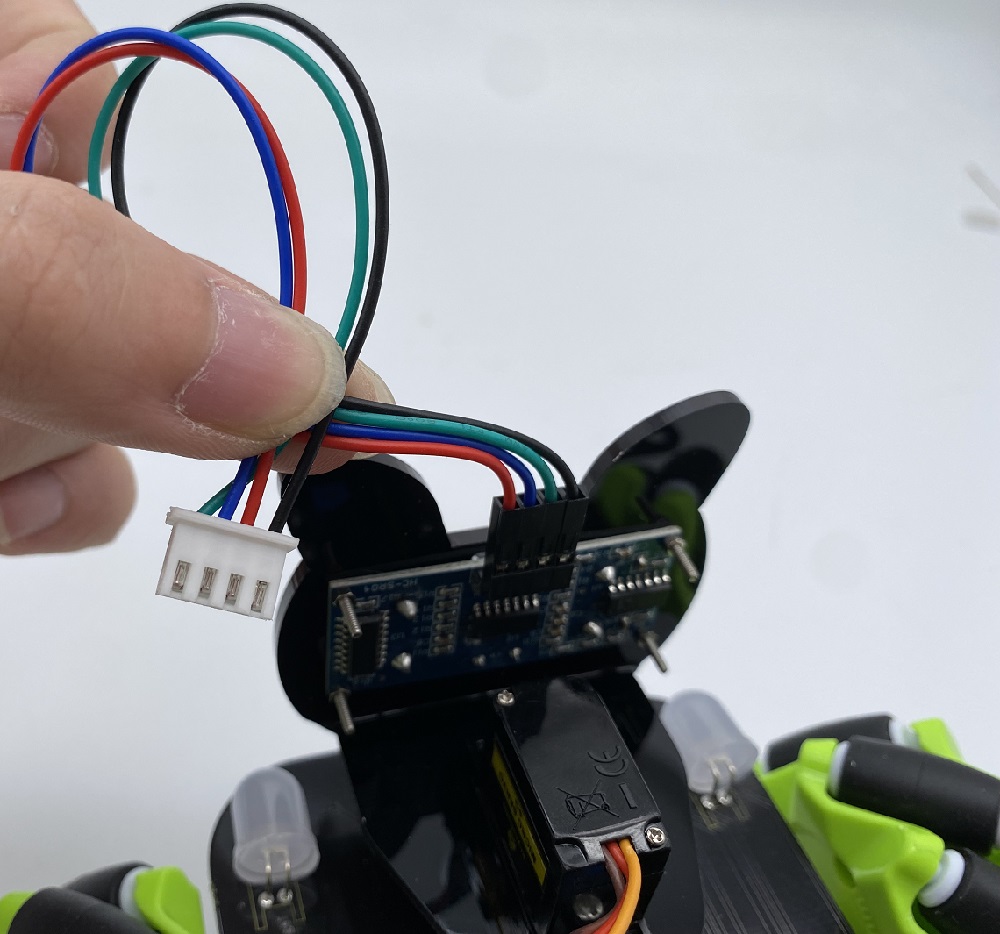
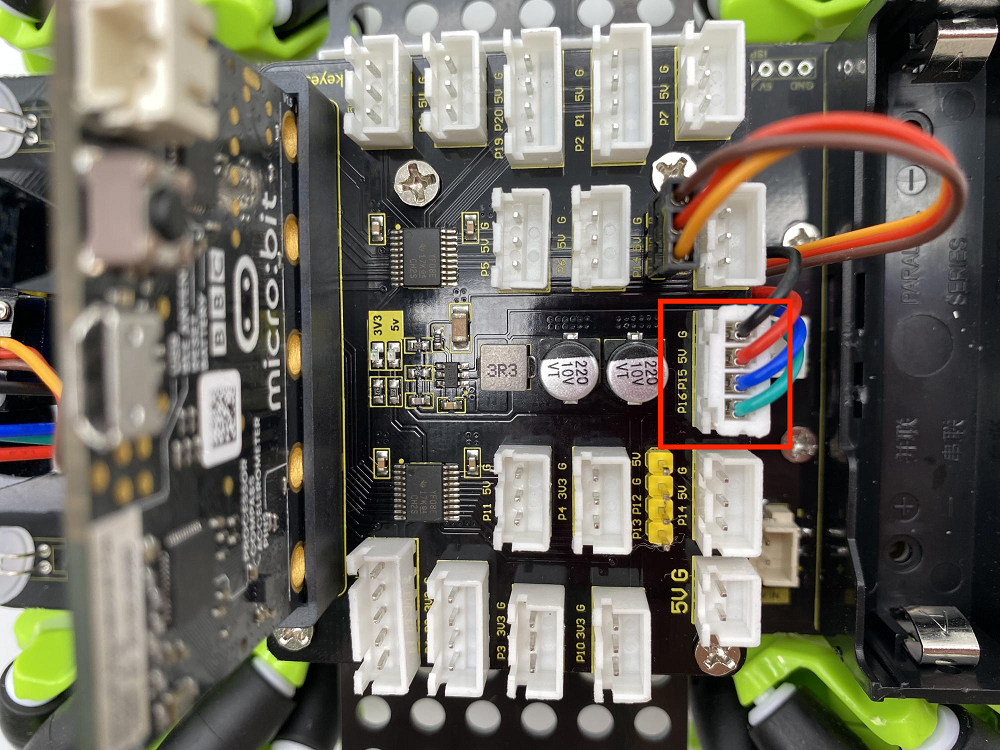
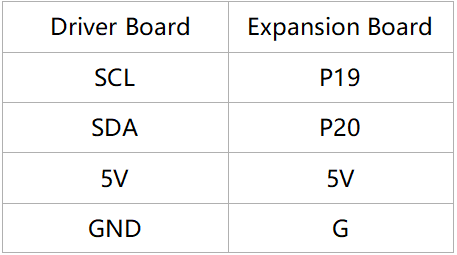
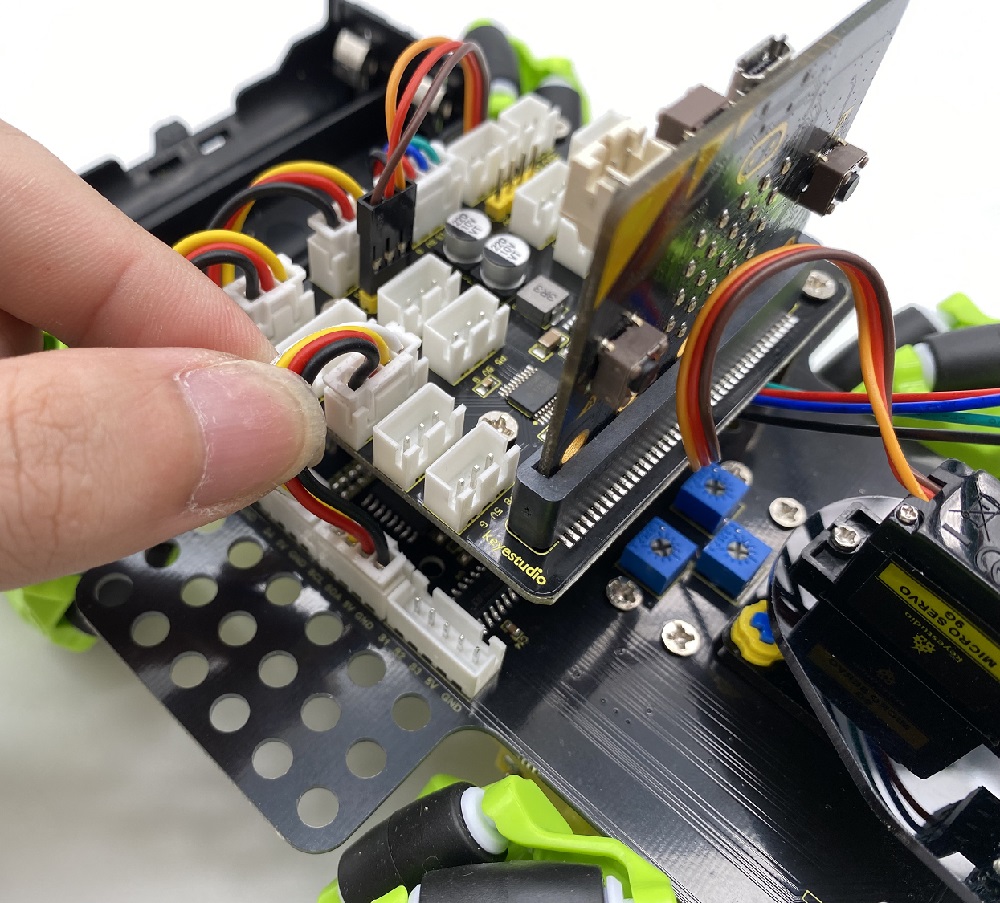
Il cablaggio del sensore ad ultrasuoni:
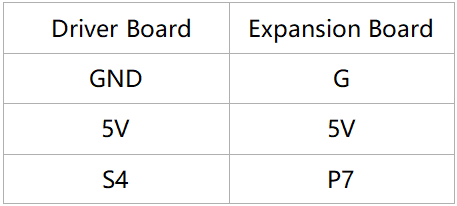
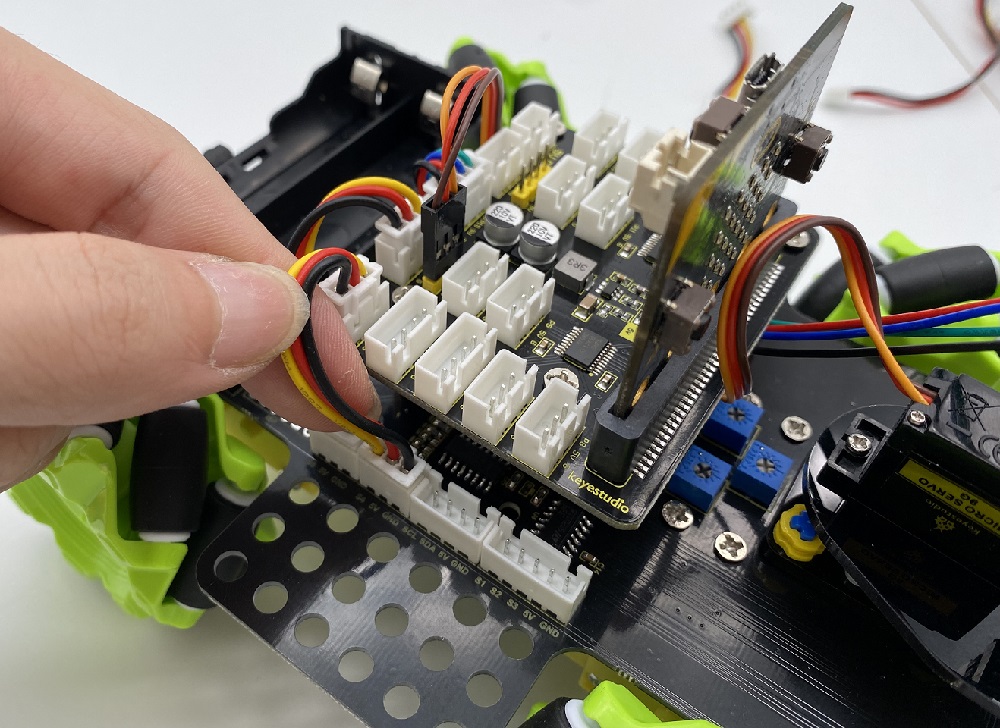
Il cablaggio del modulo ricevitore IR:
Il cablaggio del RGB:
Il cablaggio per il controllo del motore e della luce a sette colori:
Il cablaggio per il controllo del sensore di tracciamento linea a 3 canali:
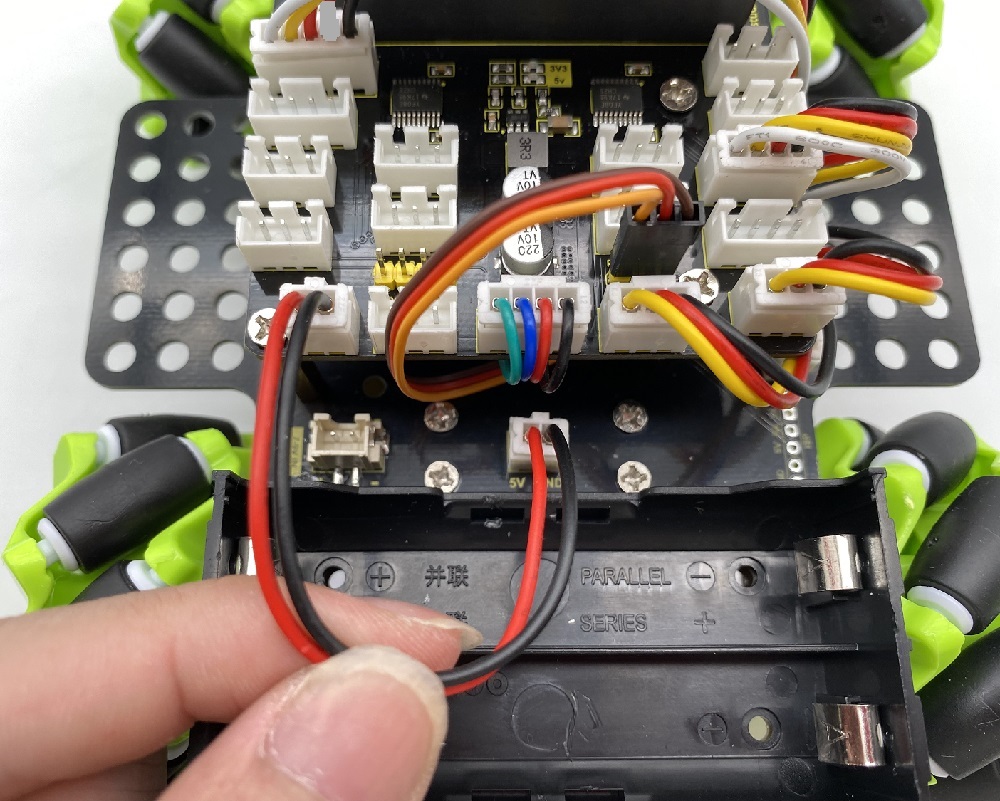
Il cablaggio dell’alimentazione:
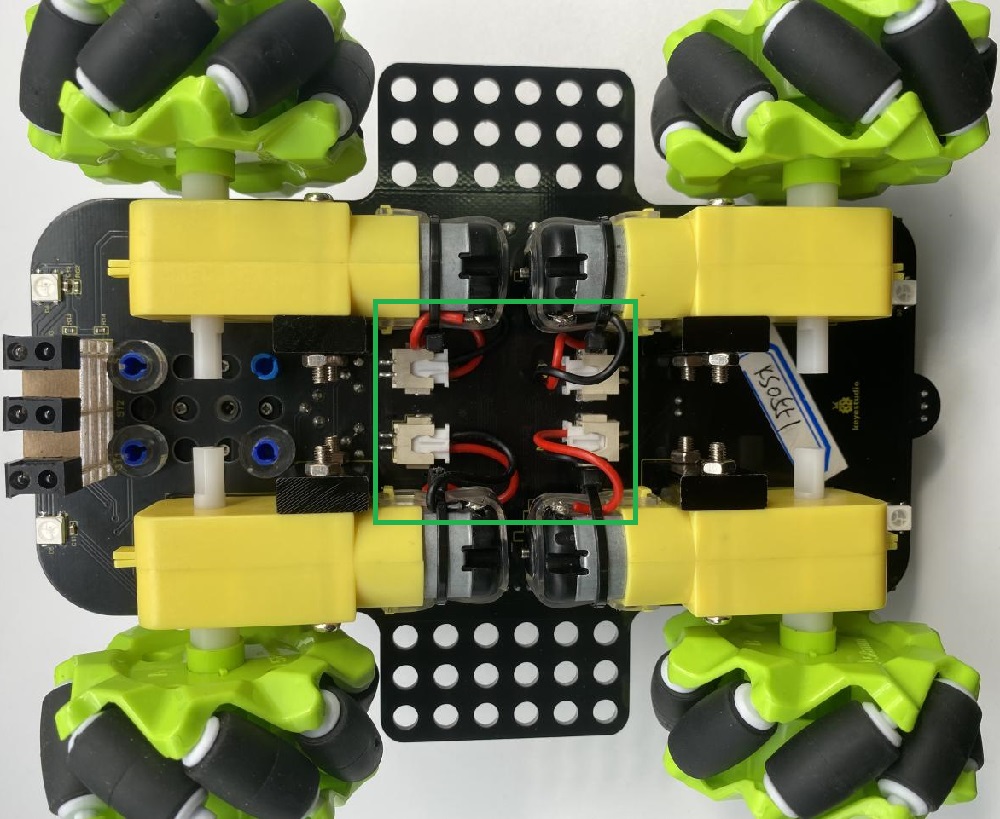
La corrispondente interfaccia del motore:
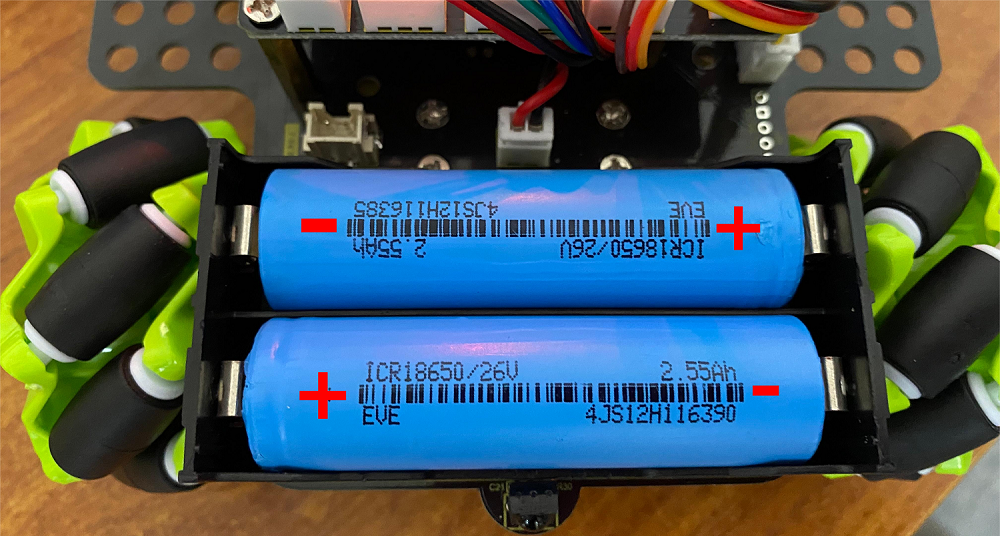
L’installazione della batteria: