Keyestudio 4WD Mecanum Robot Car V2.0 の組み立て
ステップ 1
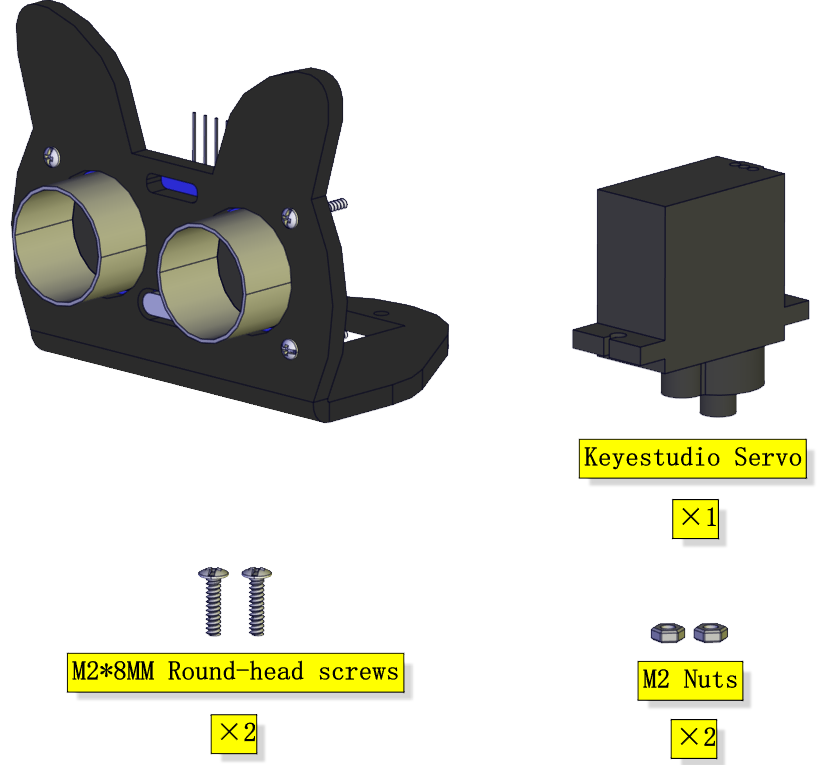
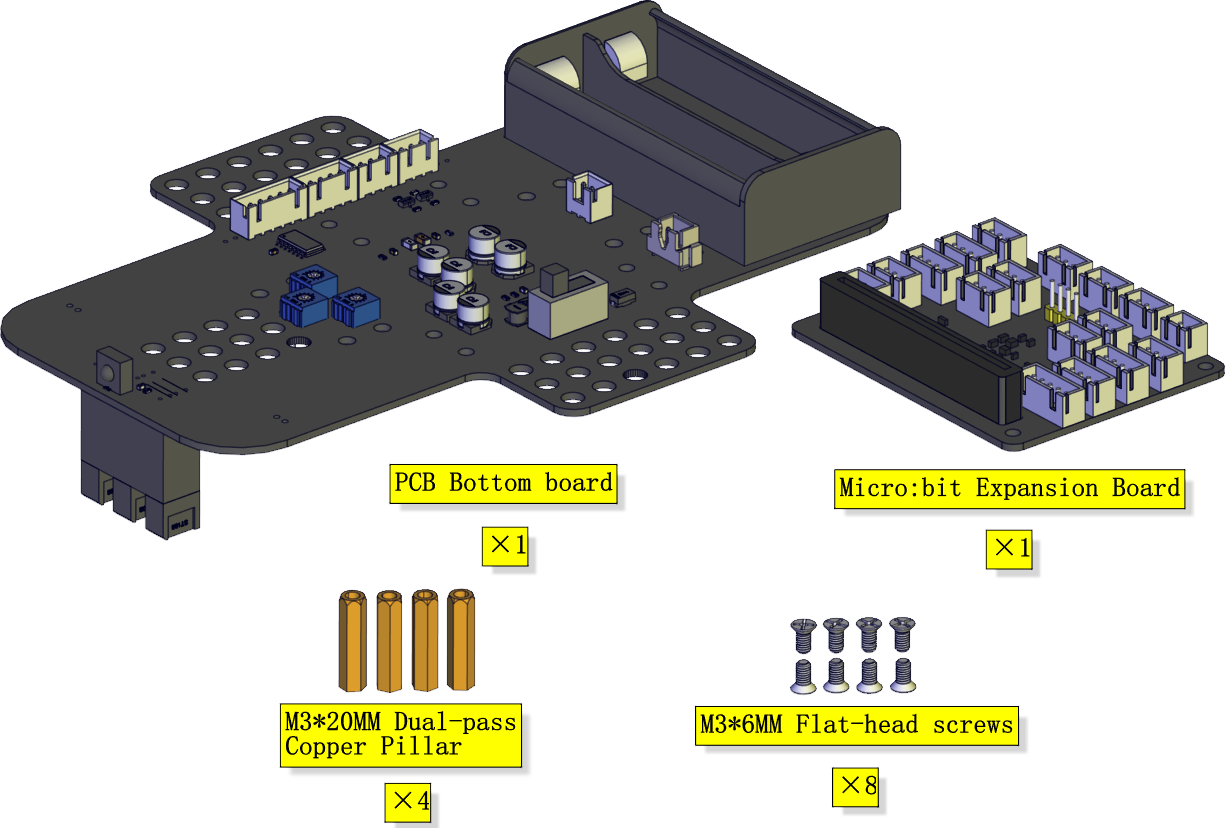
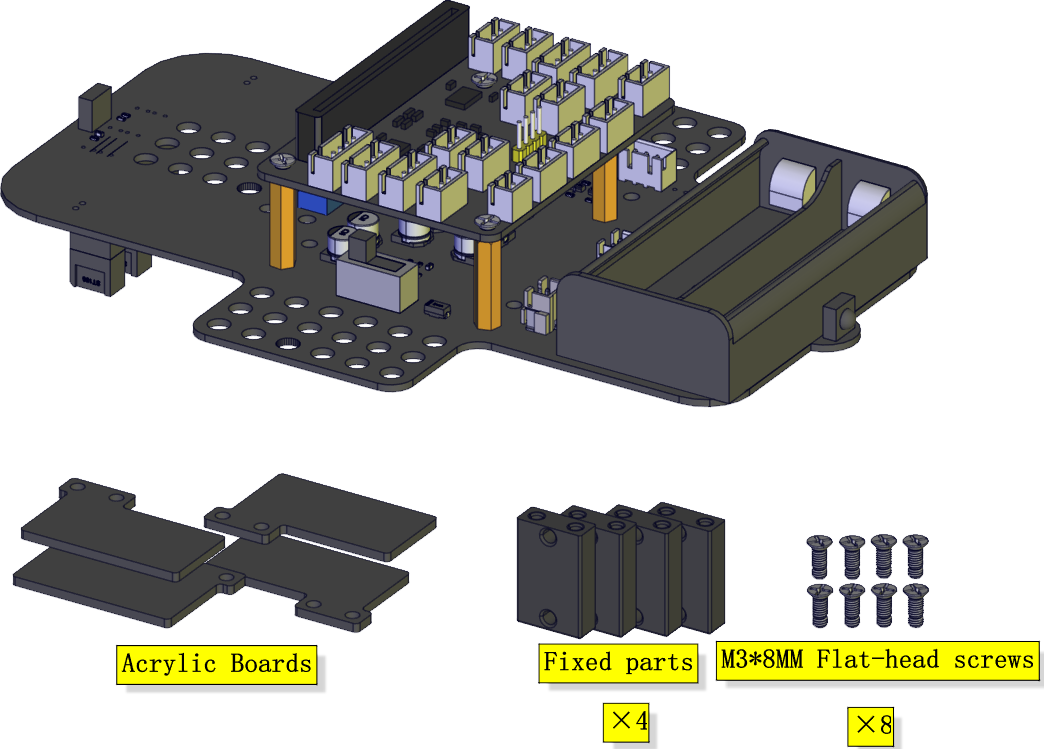
必要な部品:
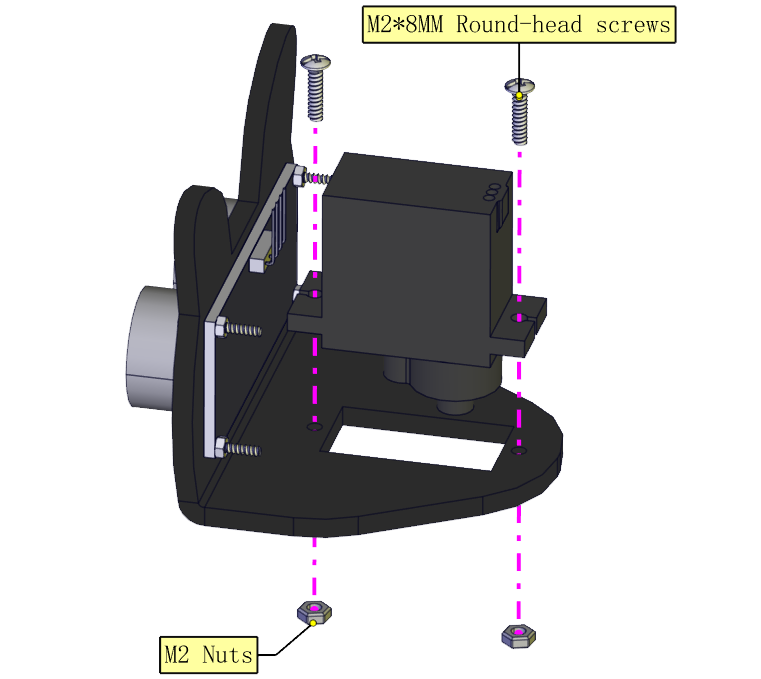
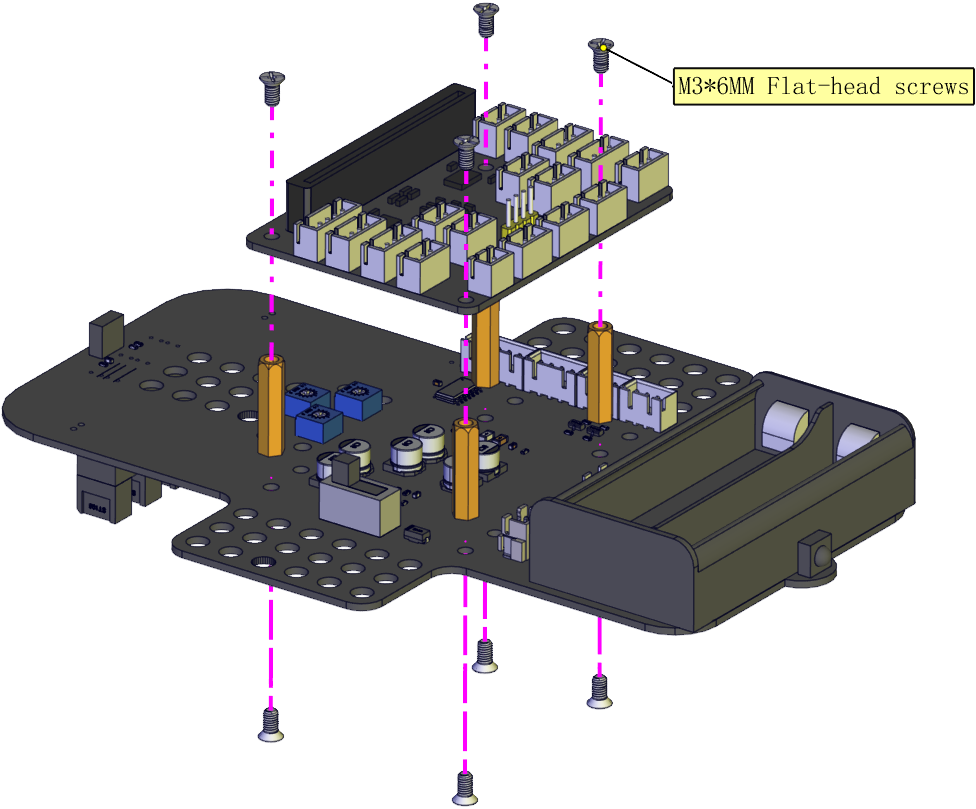
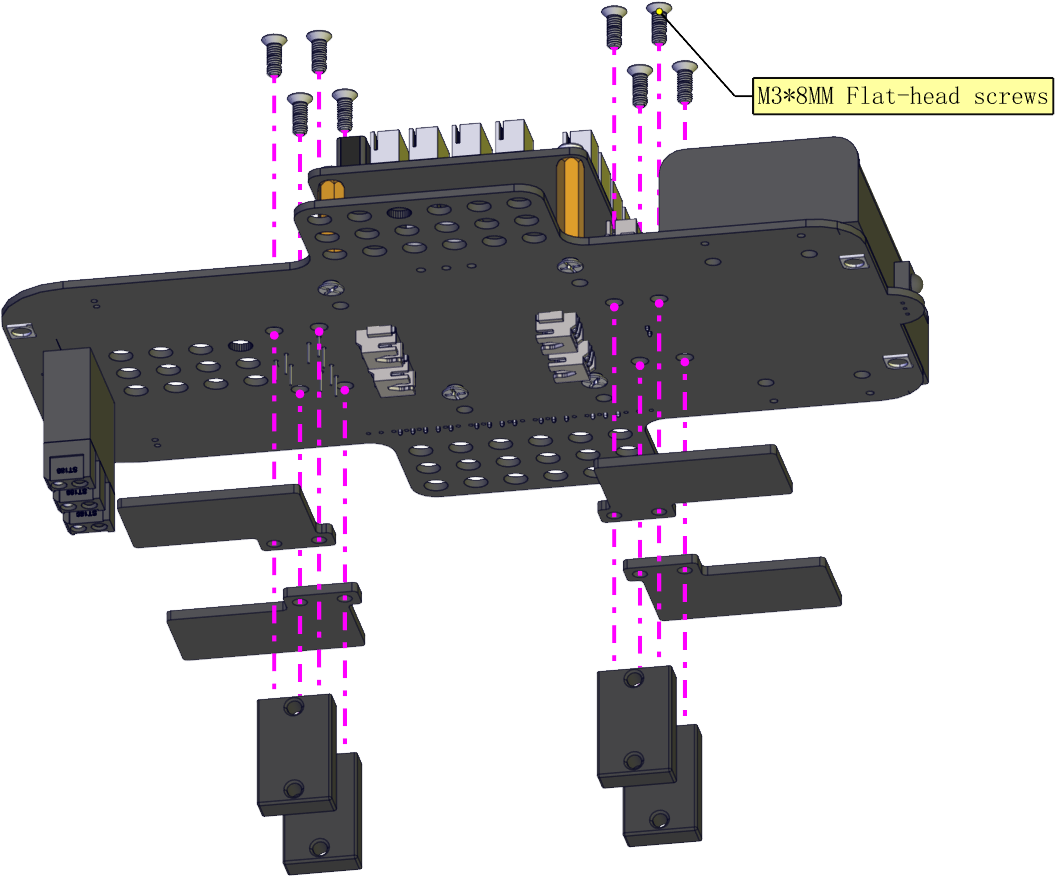
取り付け図:
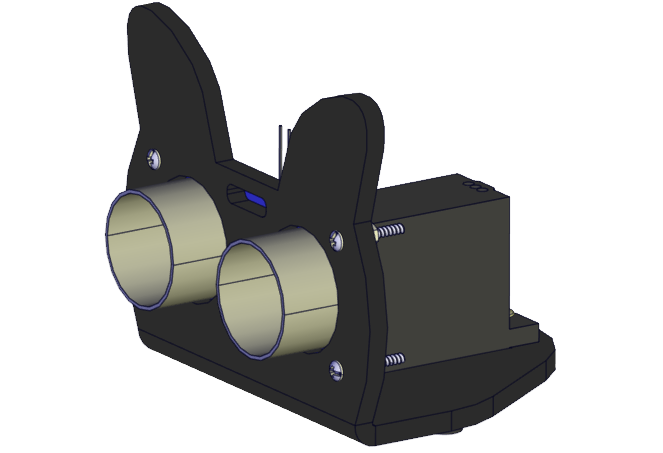
プロトタイプ:
ステップ 2
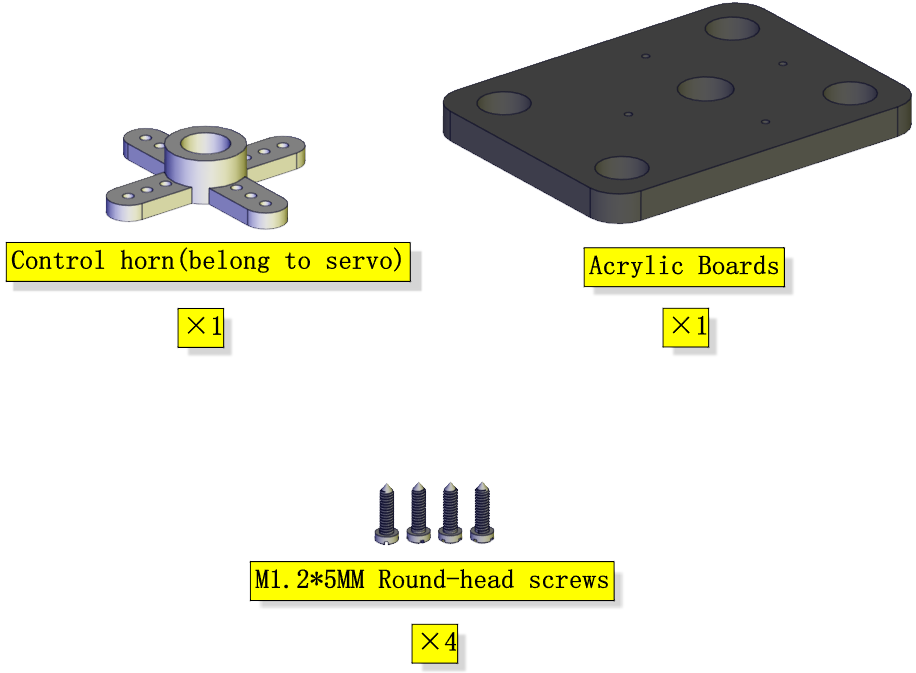
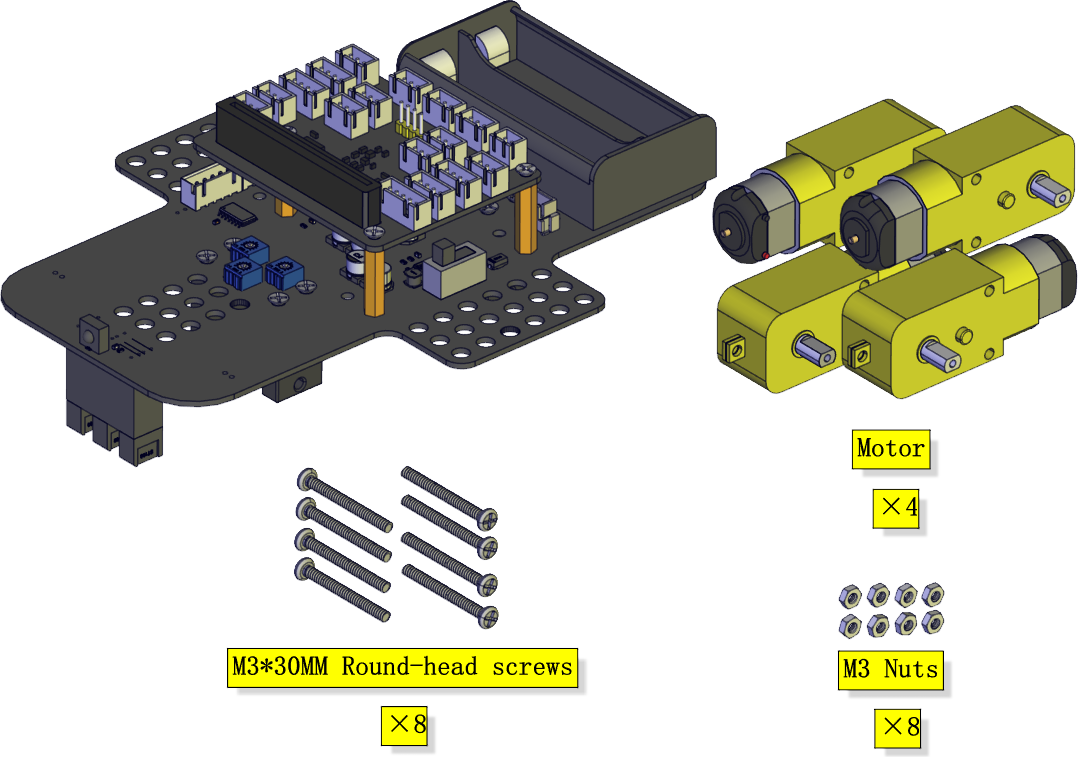
必要な部品:
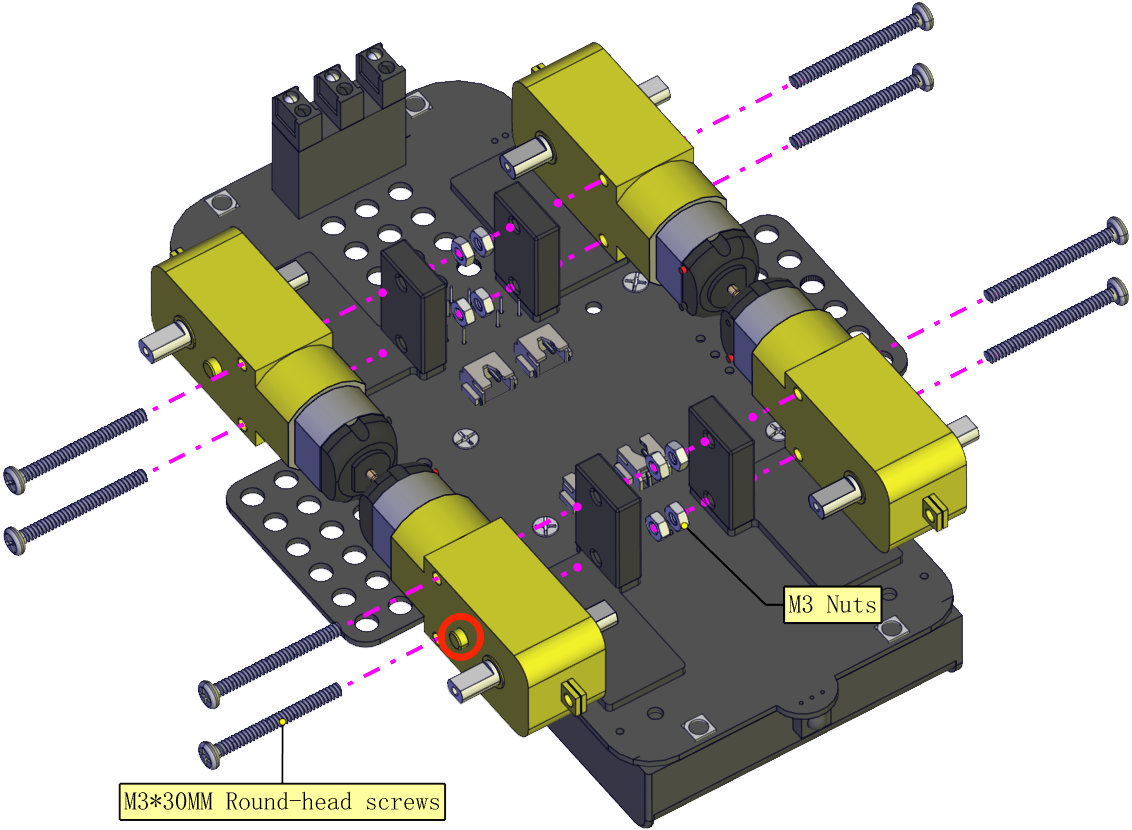
取り付け図:
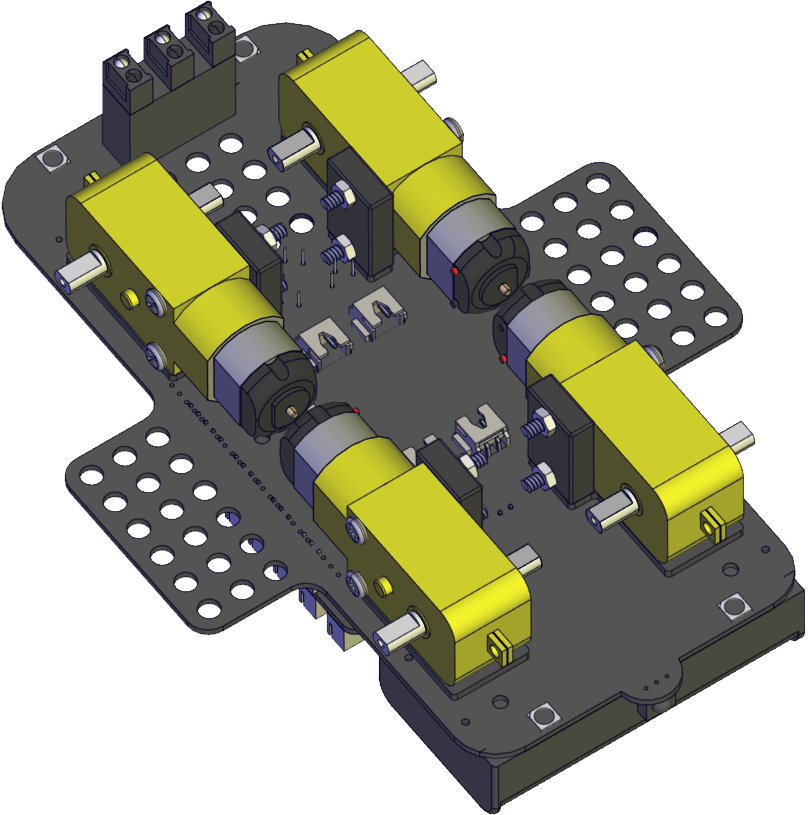
プロトタイプ:
ステップ 3
必要な部品:
取り付け図:
プロトタイプ:
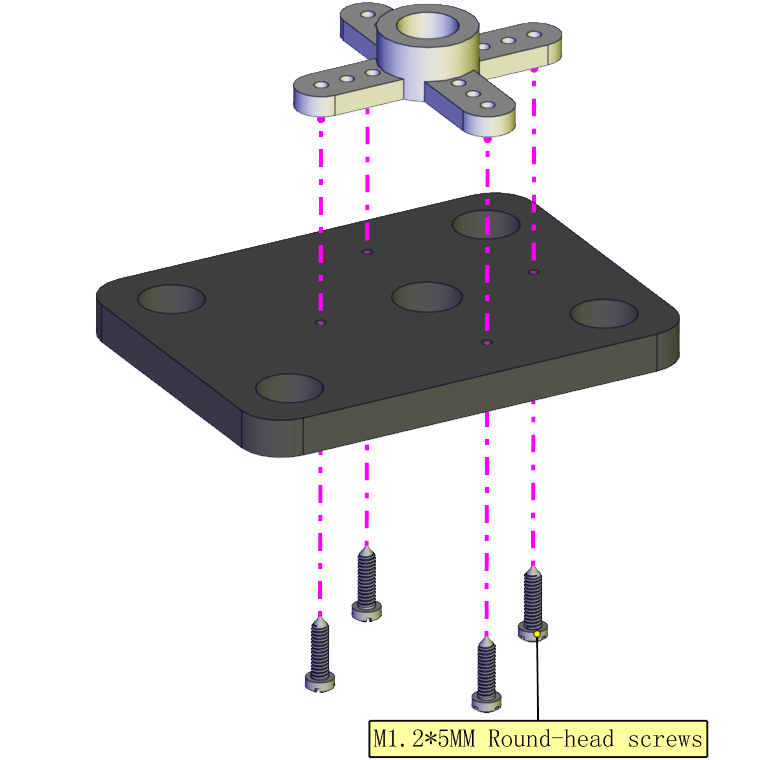
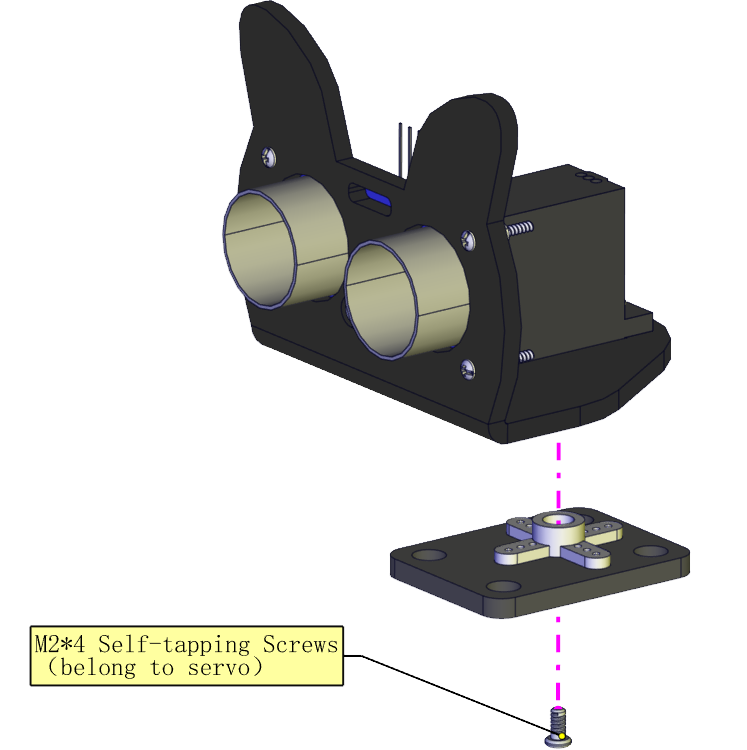
ステップ 4
(まずサーボの角度を調整してください)
サーボの角度を90度に設定します。
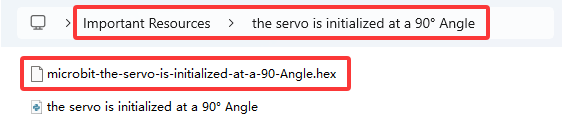
方法1: MakeCode コード
⚠️特記事項: コードを書いてアップロードする前に、MakeCode IDE を理解し、ライブラリファイルを追加する必要があります。次のリンクにアクセスしてください: Get Started with makecode

上記の MakeCode コードは資料に含まれています。サーボの調整用コードを開き、それを 4WD Mecanum Robot Car V2.0 の microbit 本体に書き込み、micro USB ケーブルまたは外部電源で電源を入れてください(DIP switch を ON にしてください)。これで完了です。コードは図に示した位置にあります:
方法2:Python コード
⚠️特記事項: コードを書いてアップロードする前に、Mu IDE をインストールし、ライブラリファイルを追加する必要があります。次のリンクにアクセスしてください: Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
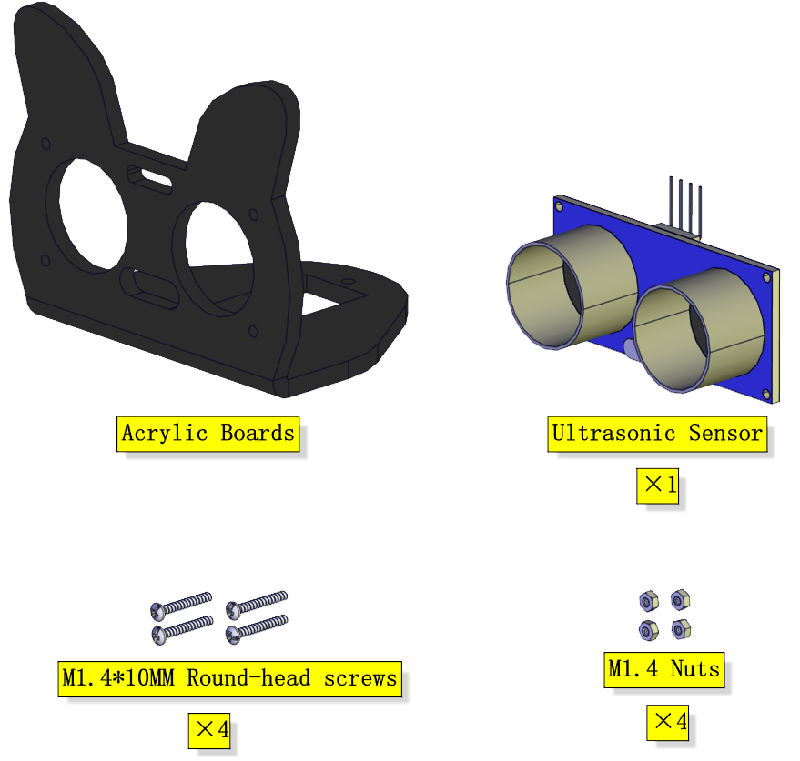
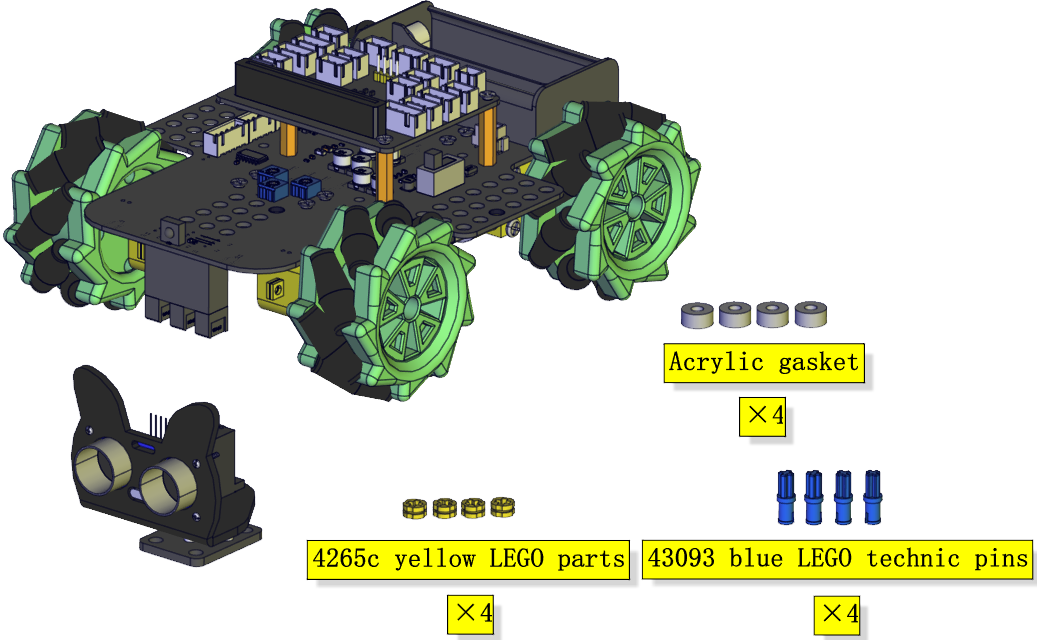
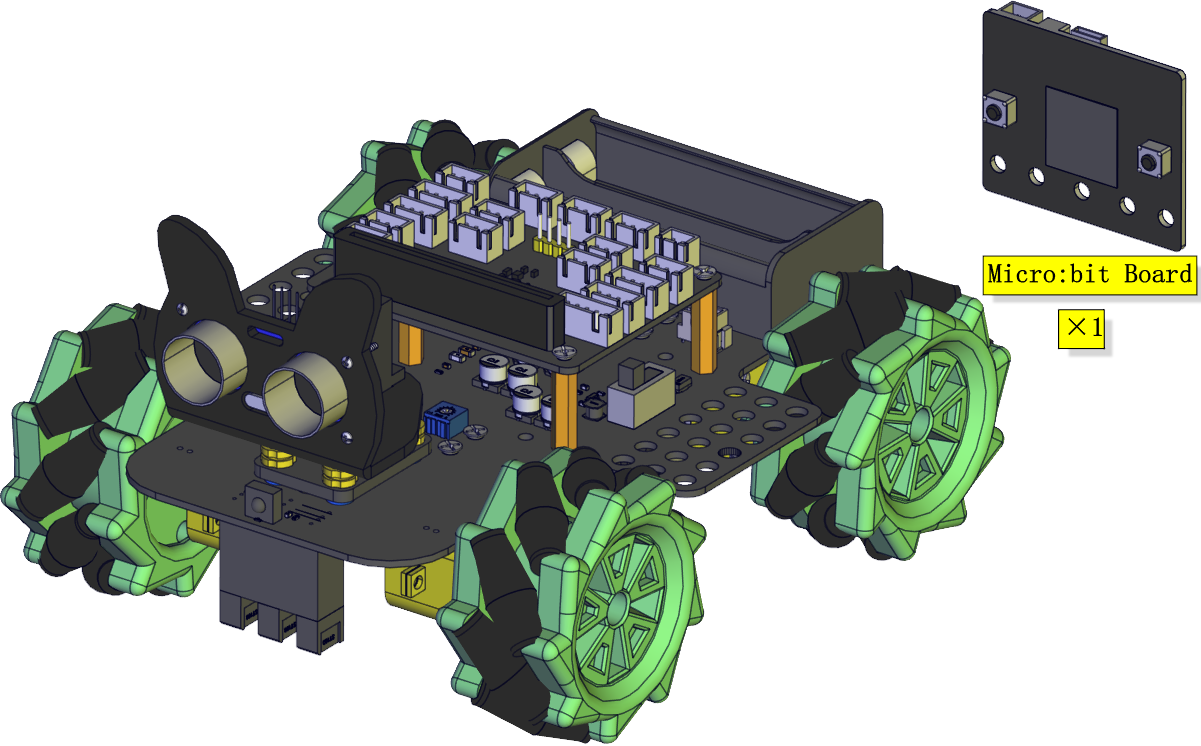
必要な部品:
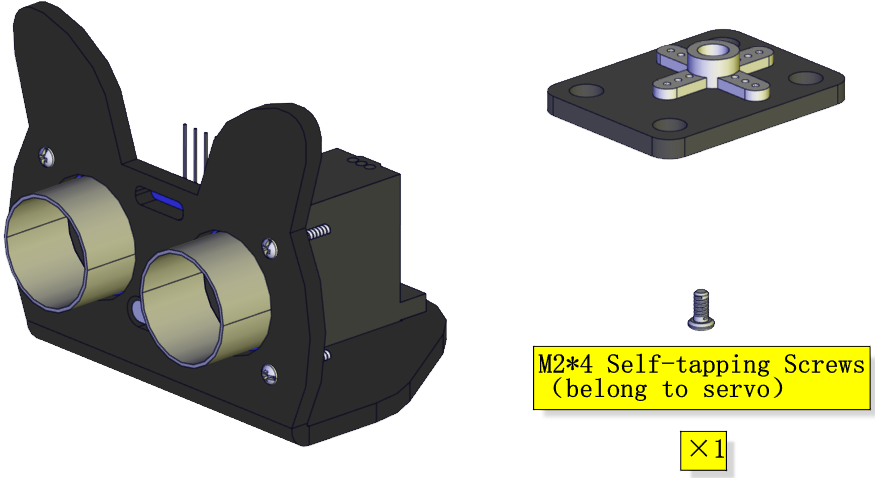
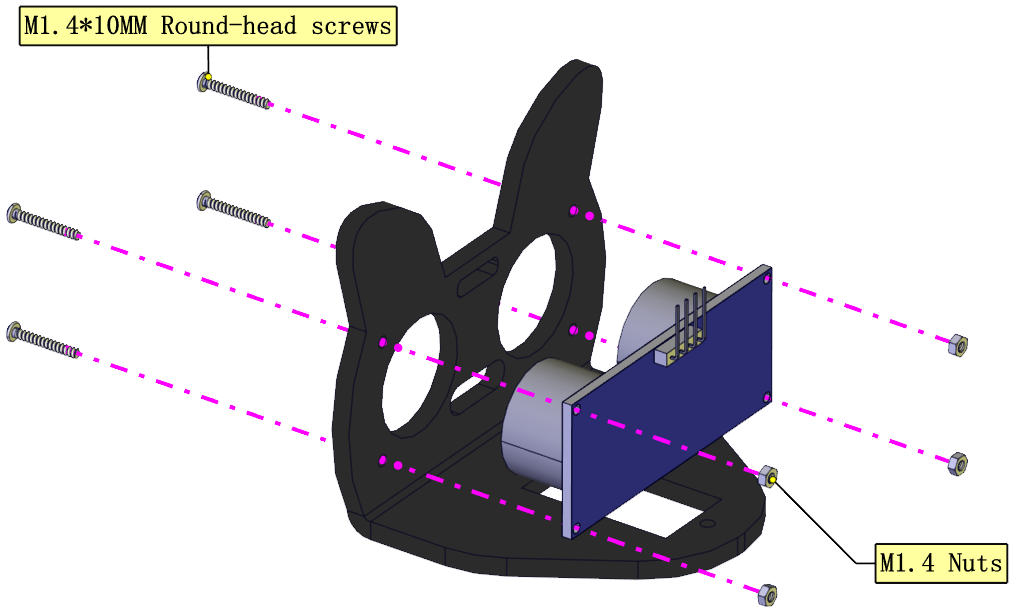
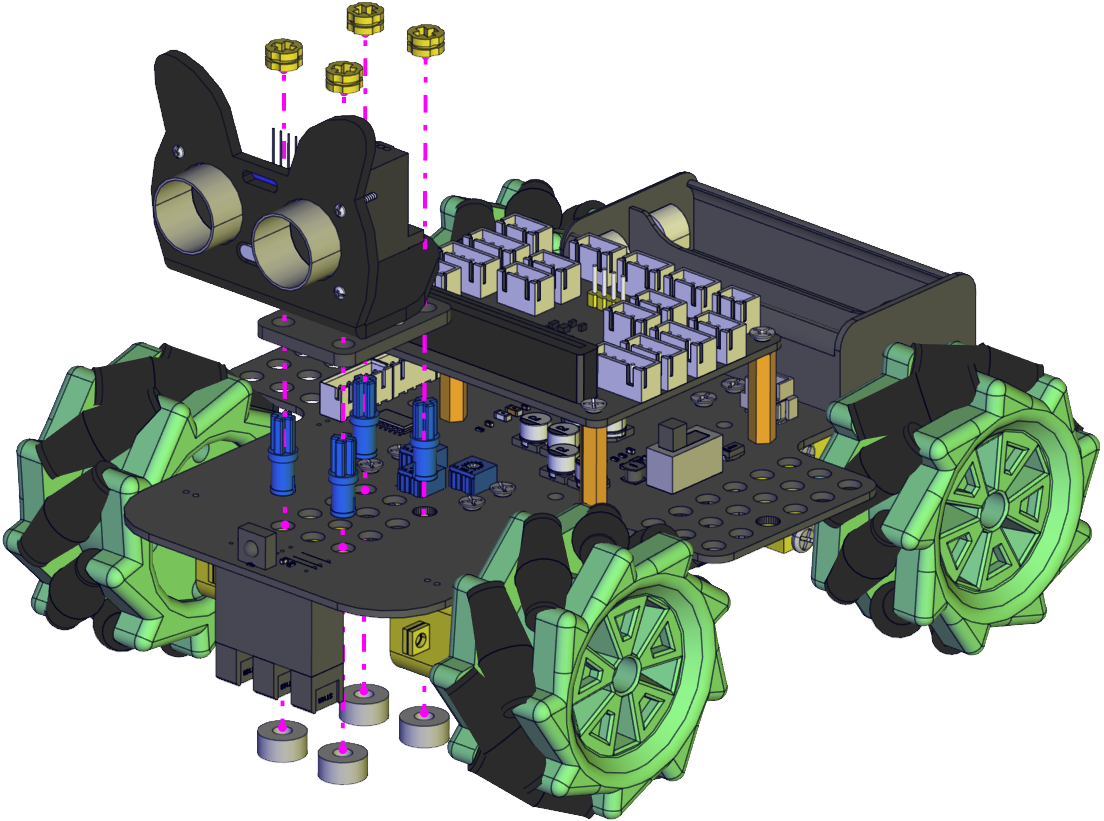
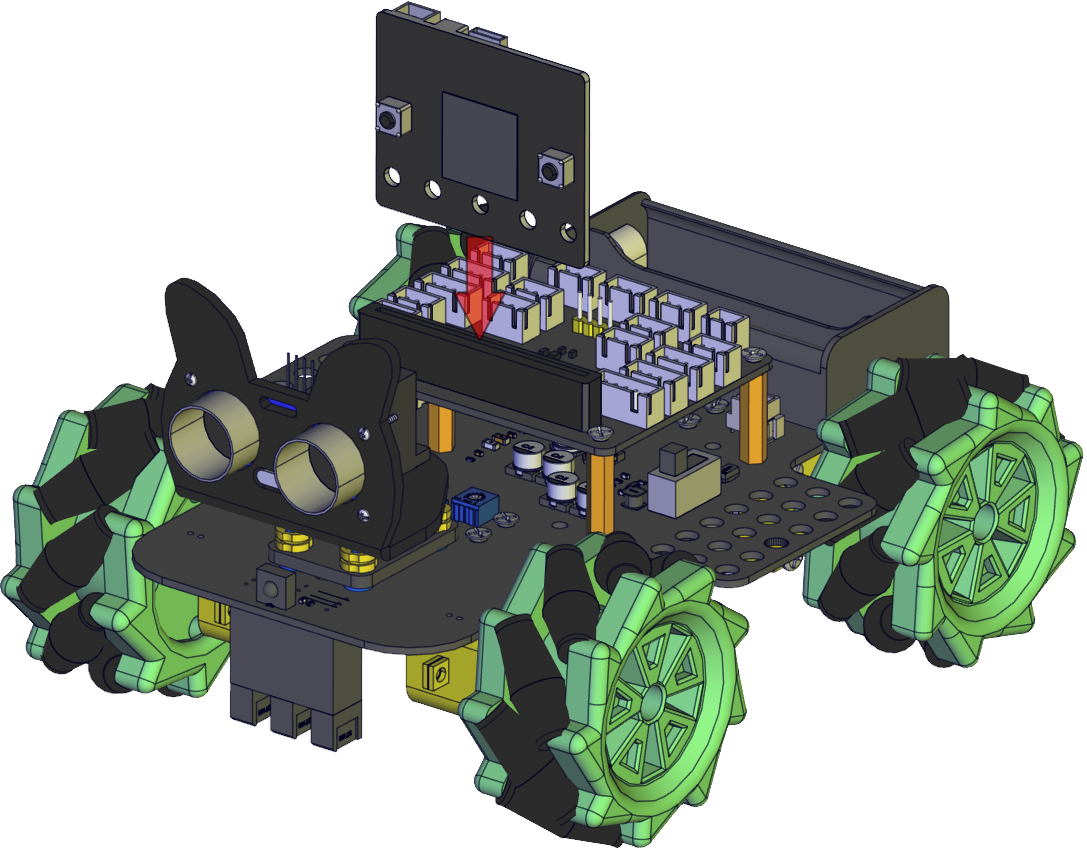
取り付け図:(取り付け方向に注意)
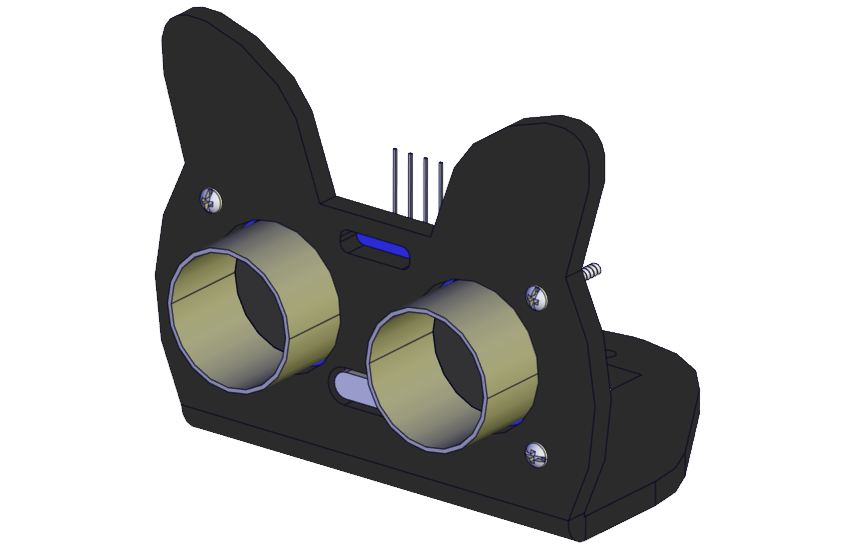
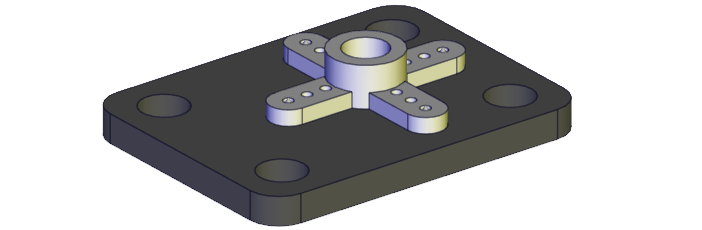
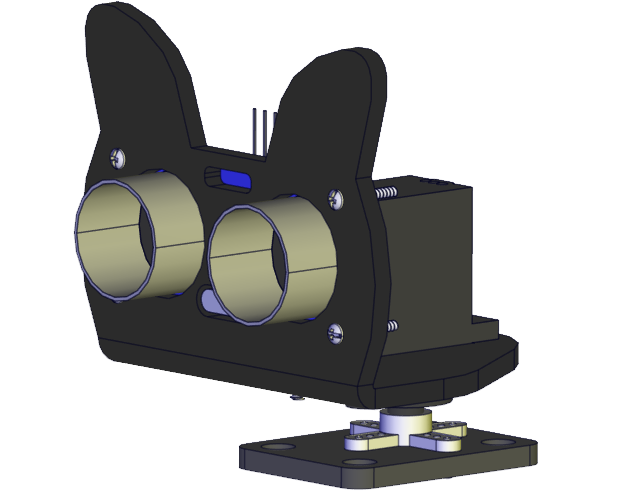
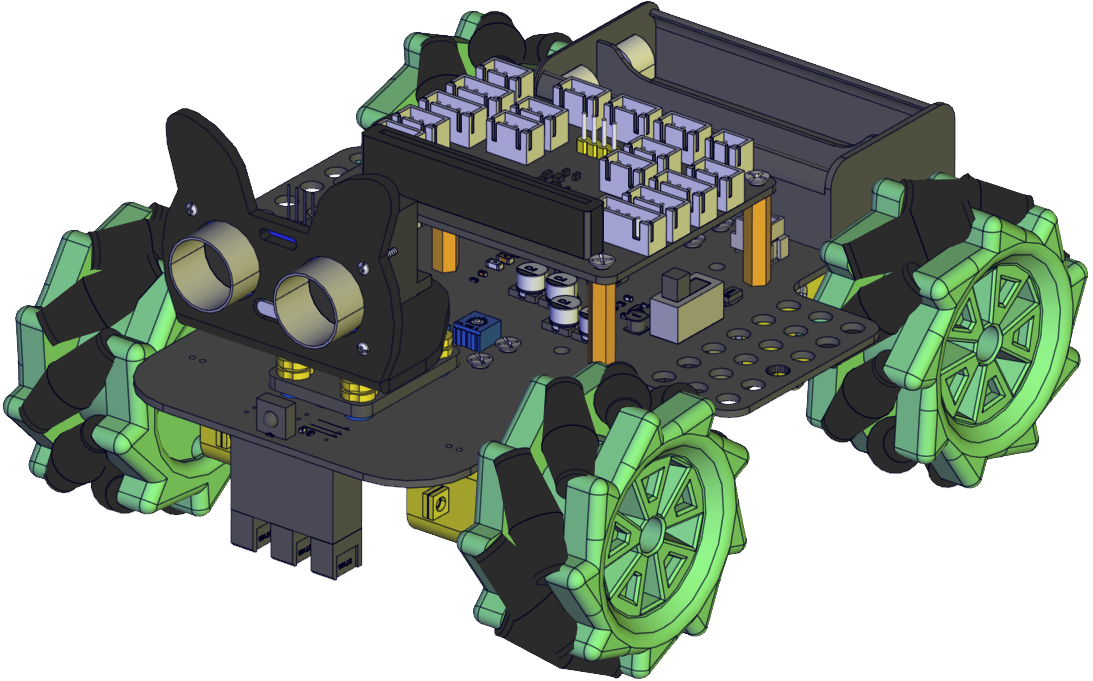
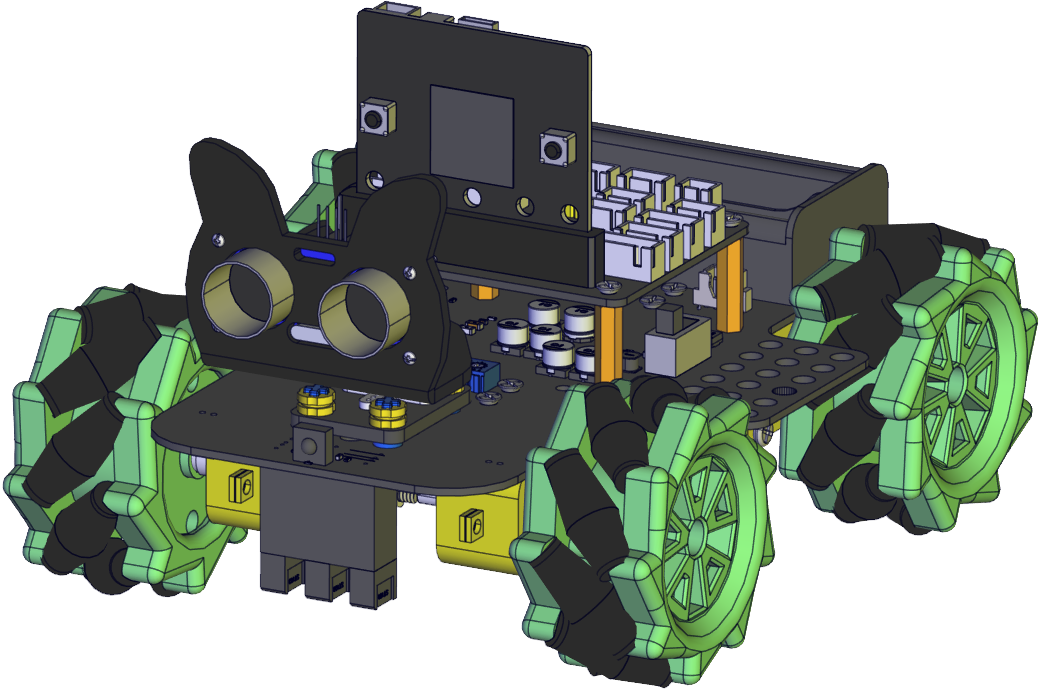
プロトタイプ:
ステップ 5
必要な部品:
取り付け図:
プロトタイプ:
ステップ 6
必要な部品:
取り付け図:
プロトタイプ:
ステップ 7
必要な部品:
取り付け図:(モーターの向きに注意)
プロトタイプ:
ステップ 8
必要な部品:
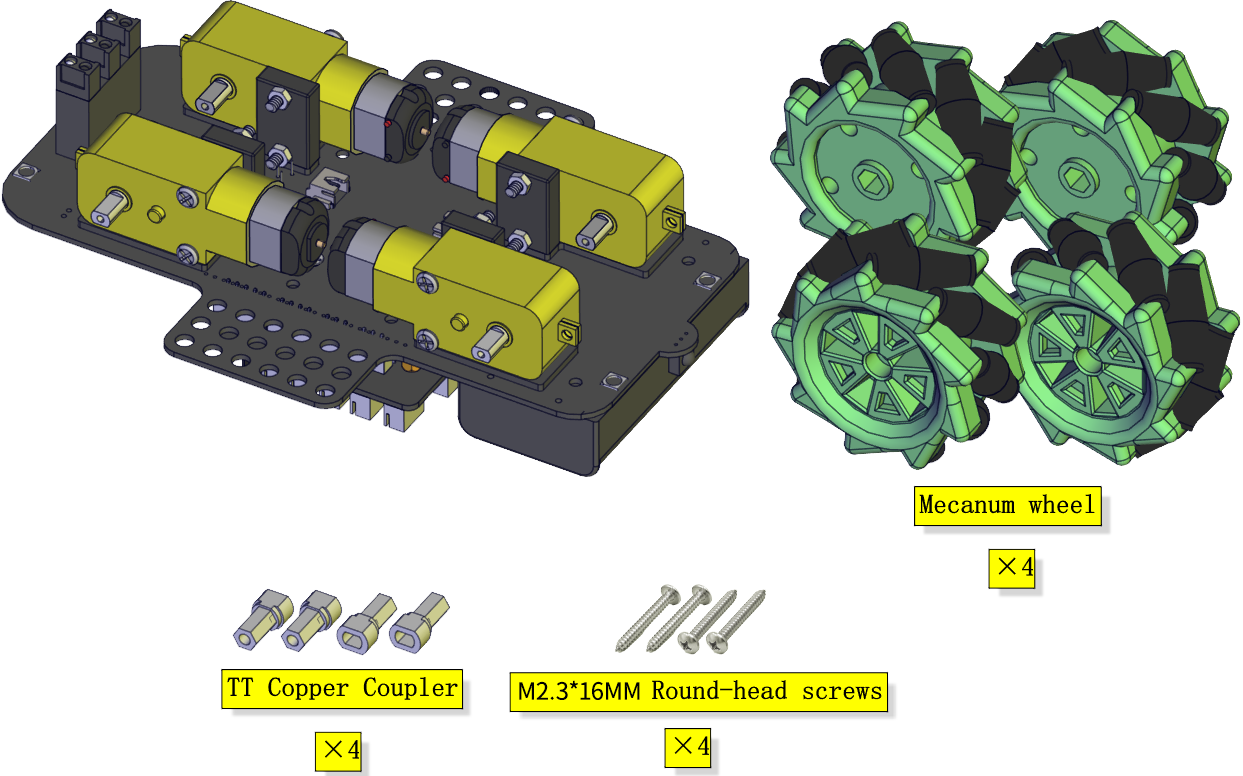
取り付け図:(メカナムホイールの取り付け方向に注意)
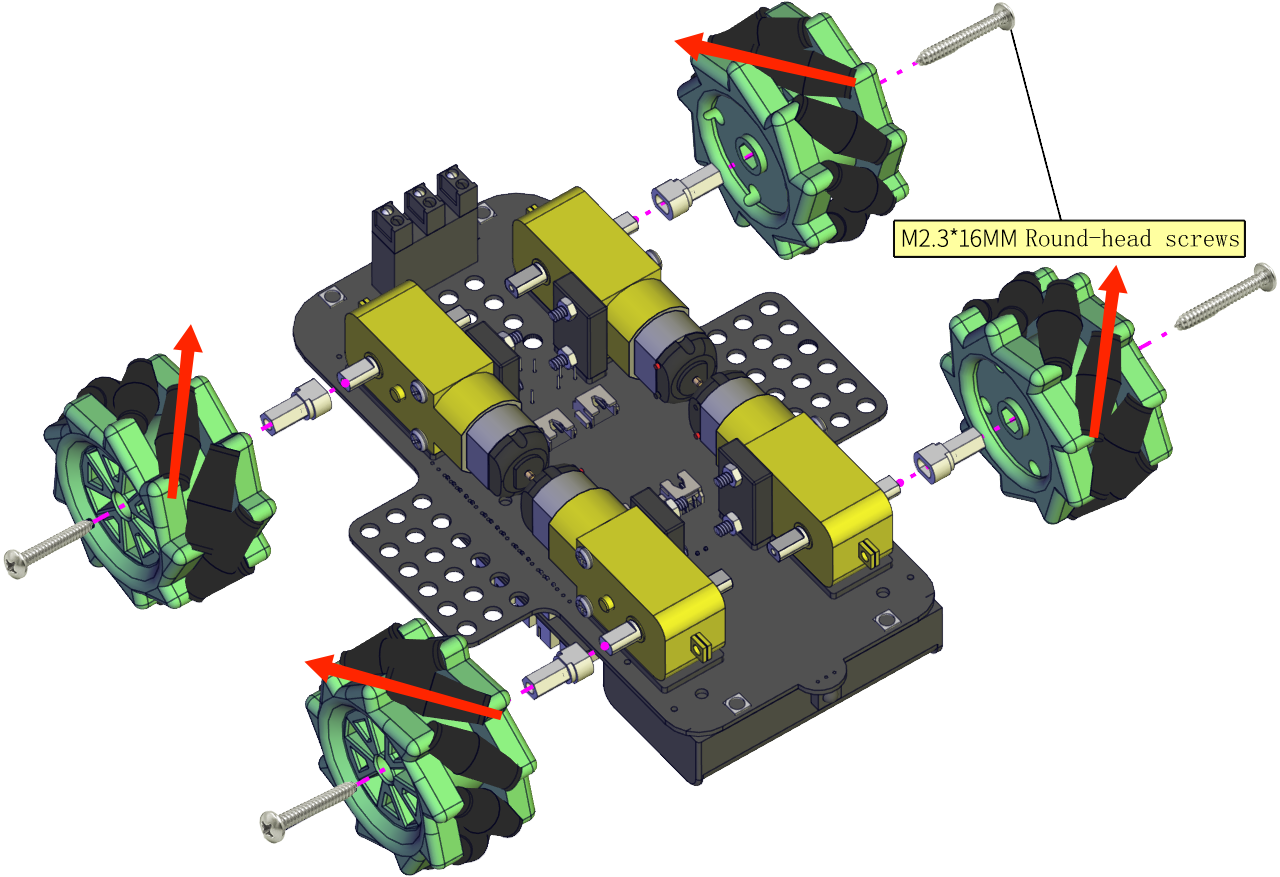
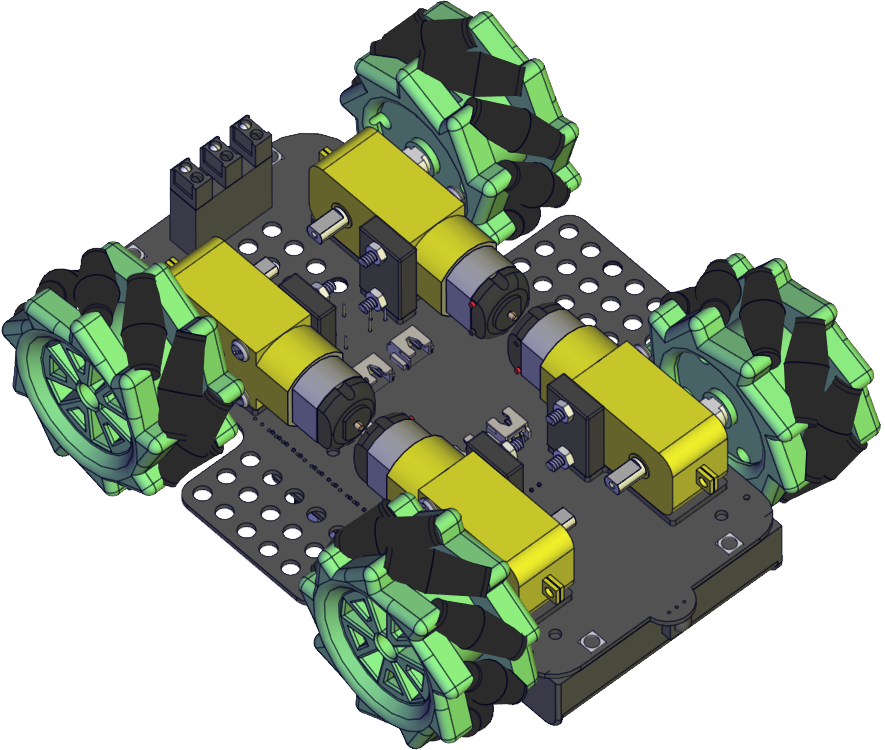
プロトタイプ:
ステップ 9
必要な部品:
取り付け図:
プロトタイプ:
ステップ 10
必要な部品:
取り付け図:
プロトタイプ:
配線図
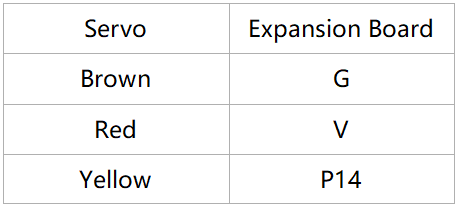
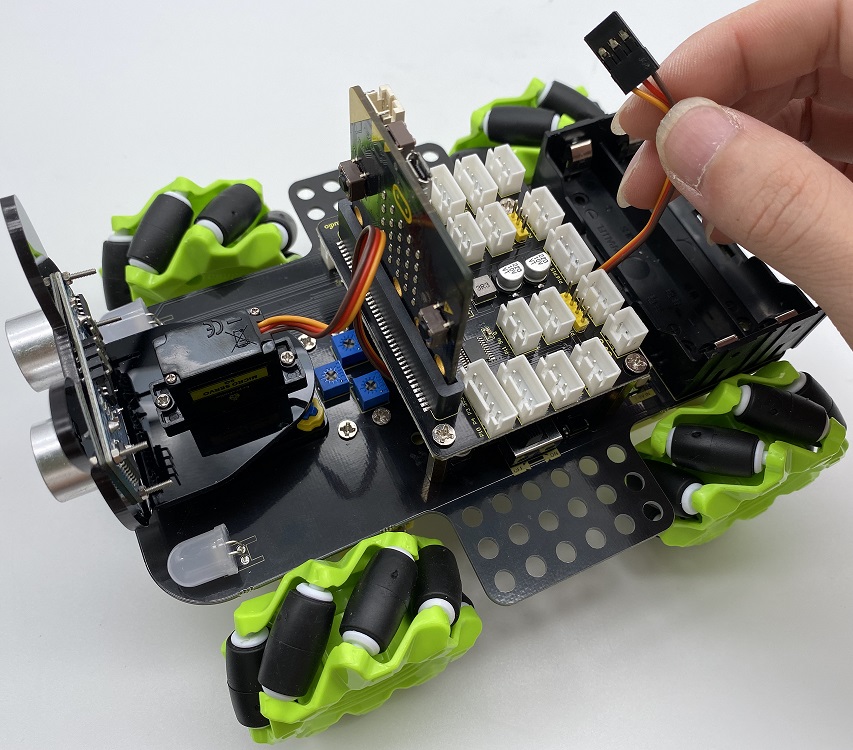
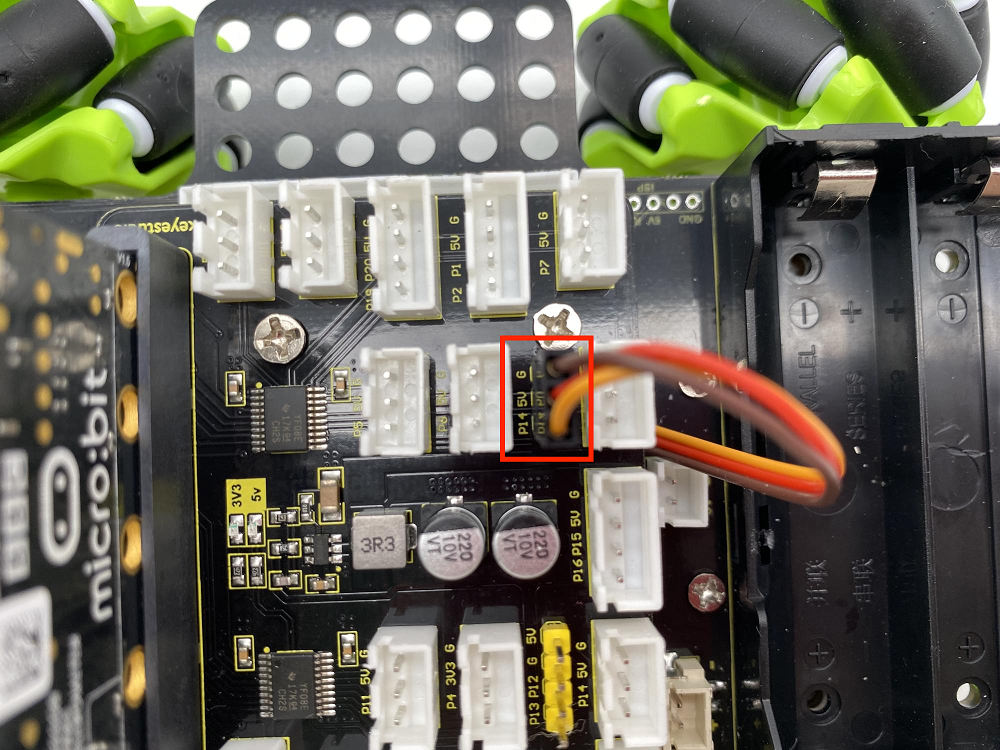
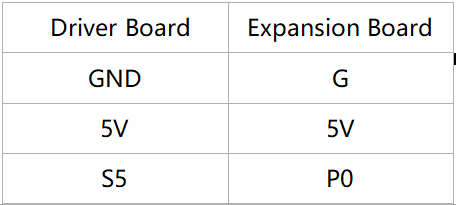
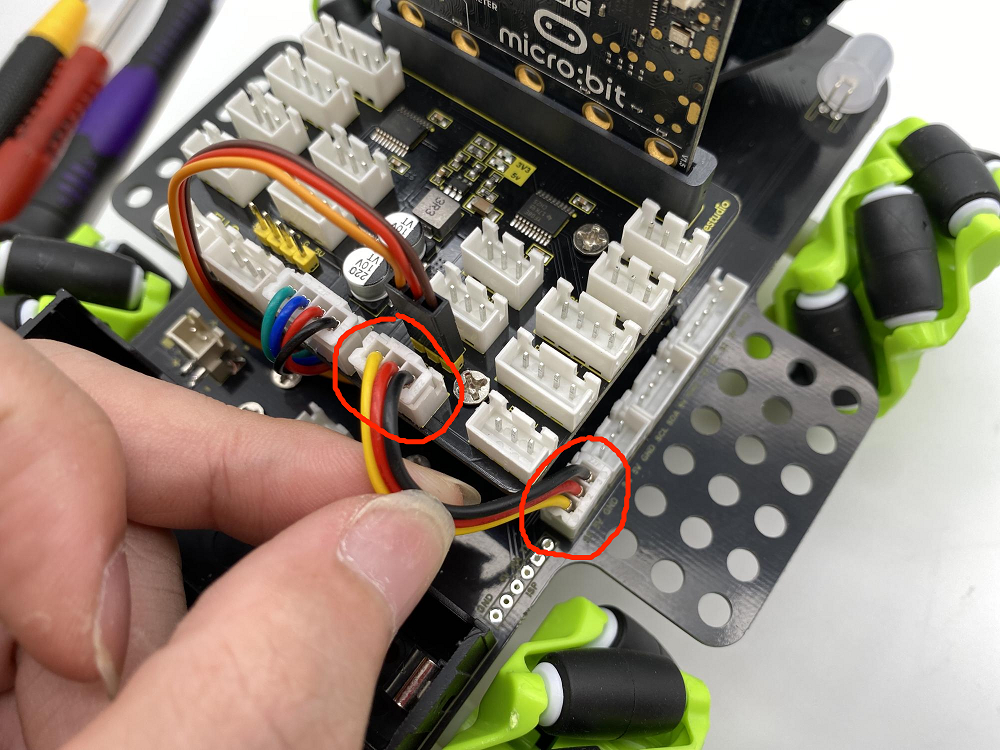
サーボの配線:
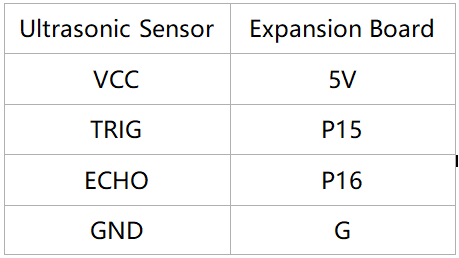
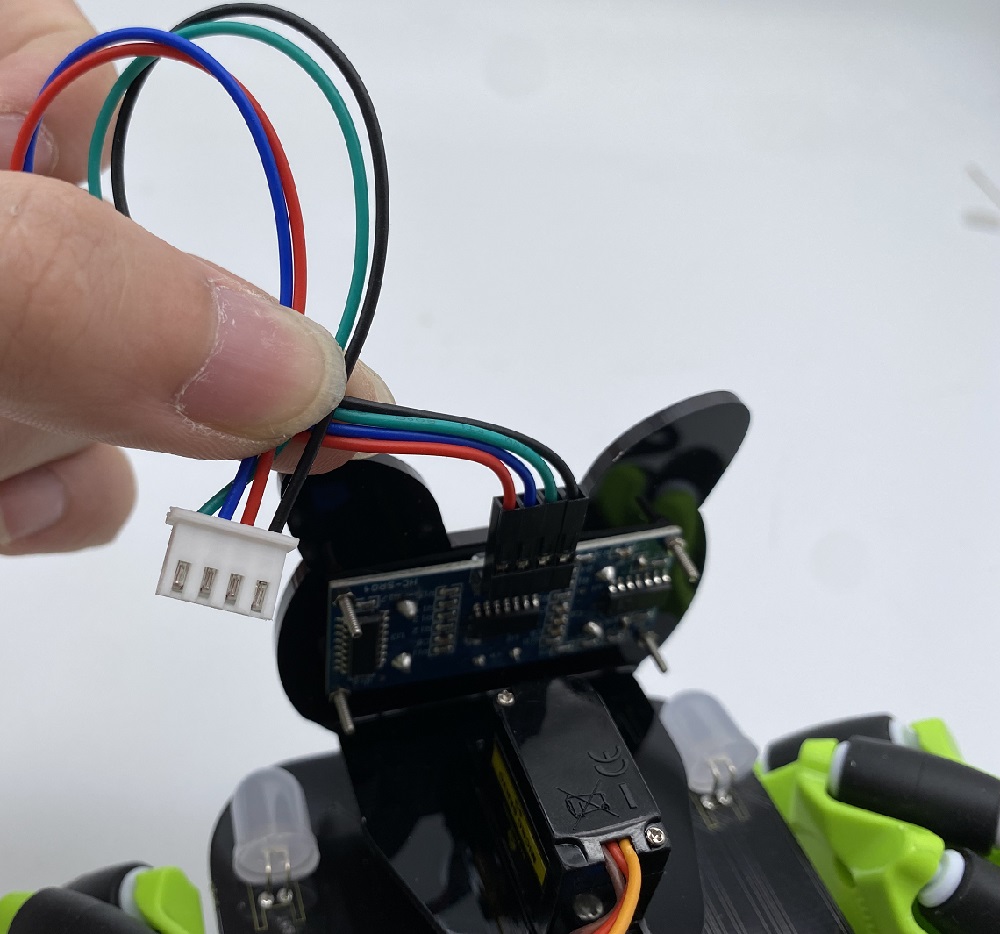
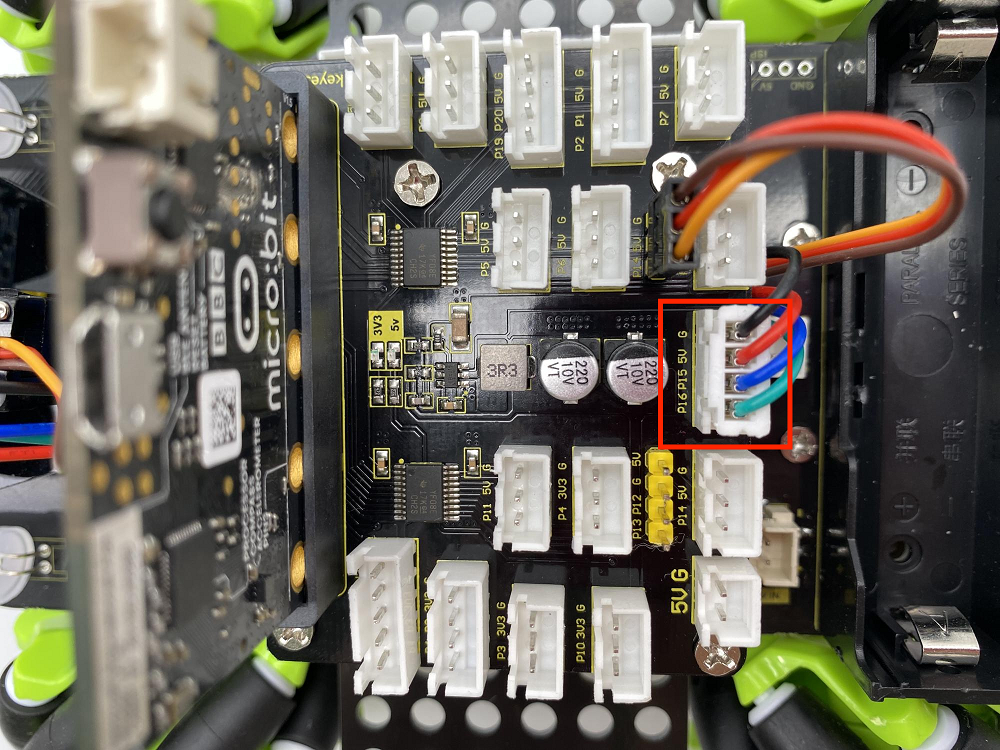
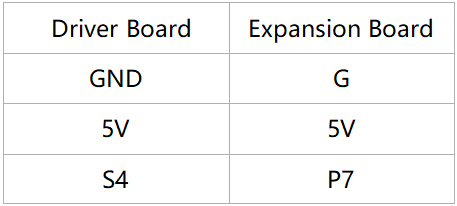
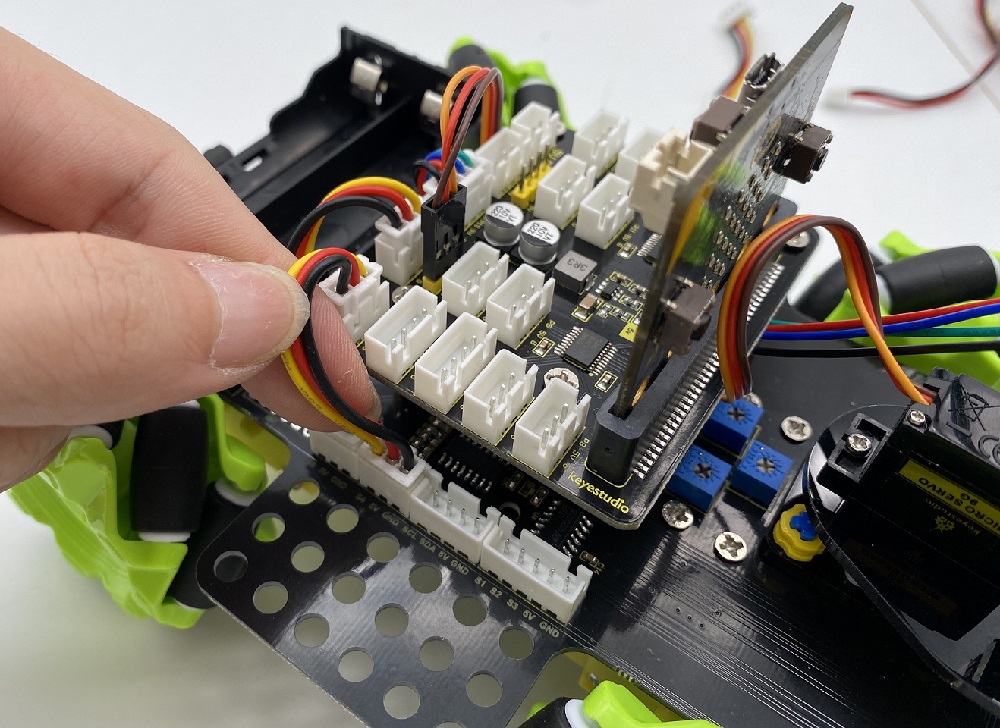
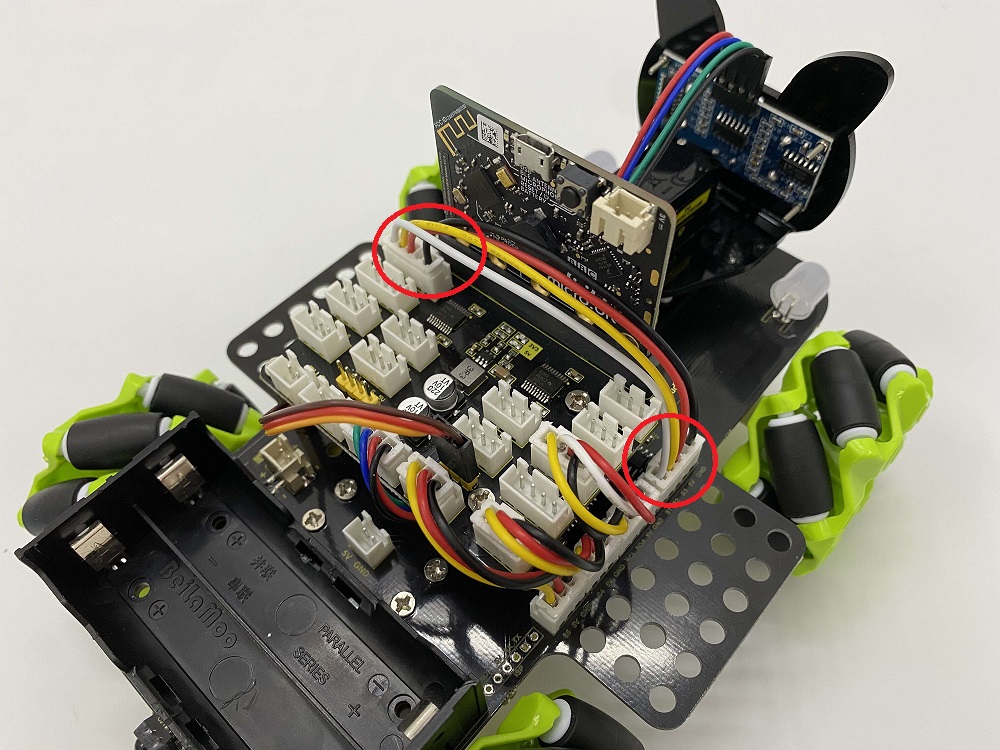
超音波センサーの配線:
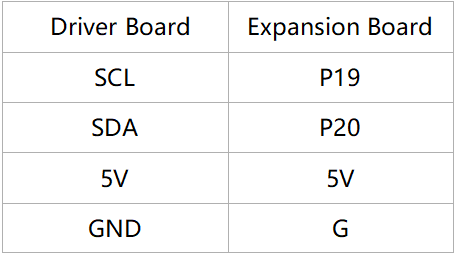
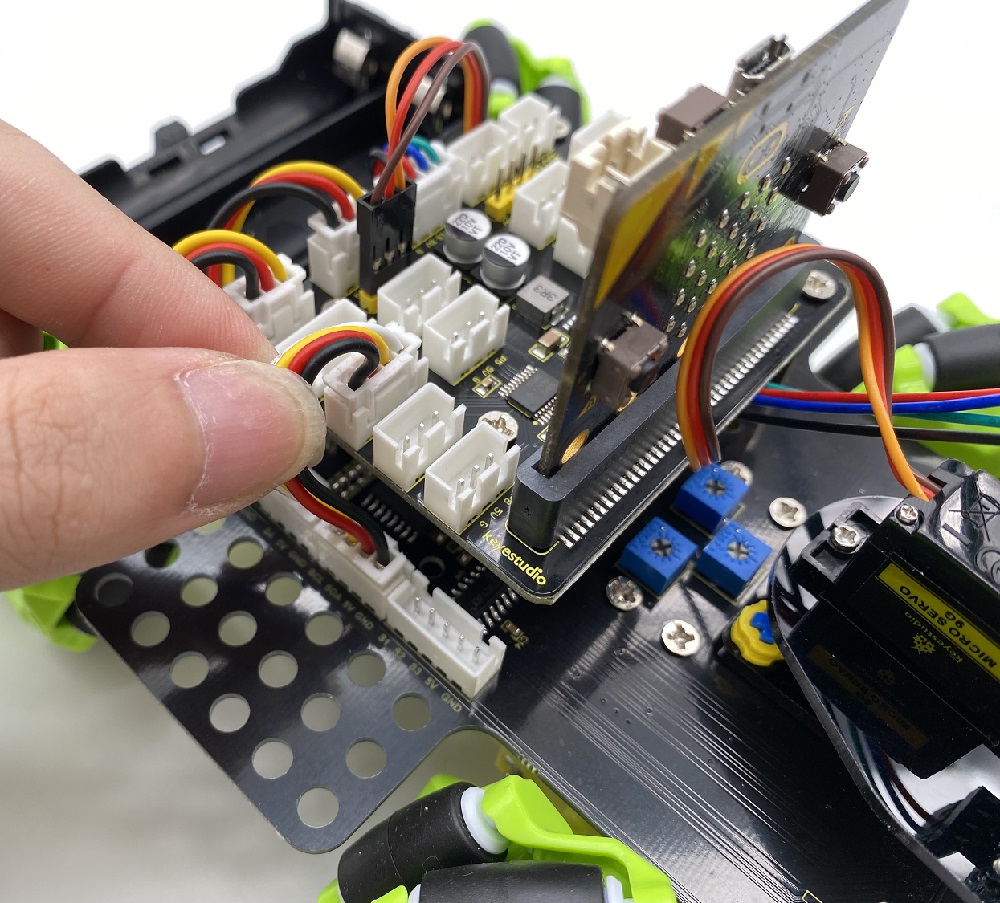
IR受信モジュールの配線:
RGB の配線:
モーターと7色ライトを制御する配線:
3チャンネルライントレースセンサーを制御する配線:
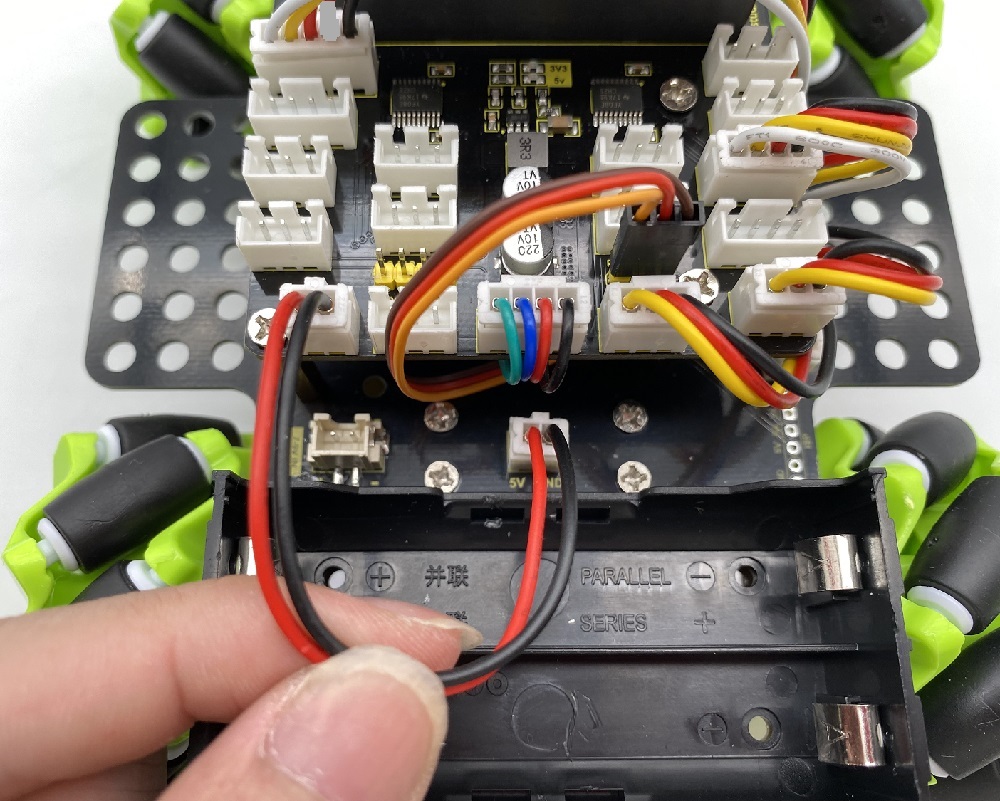
電源の配線:
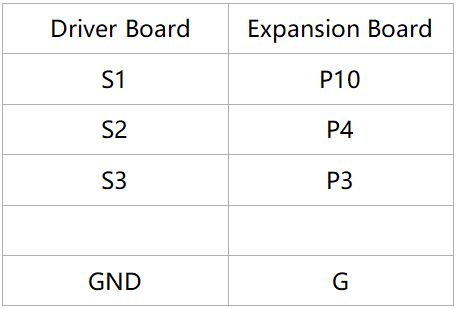
モーターの対応インターフェース:
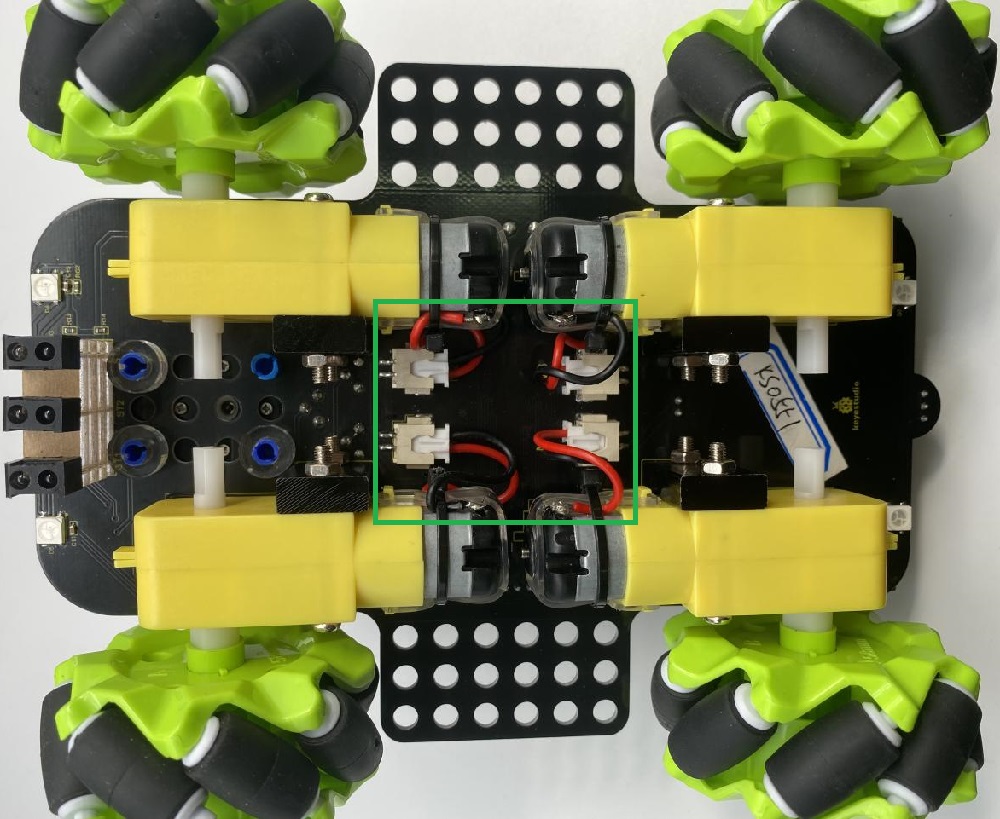
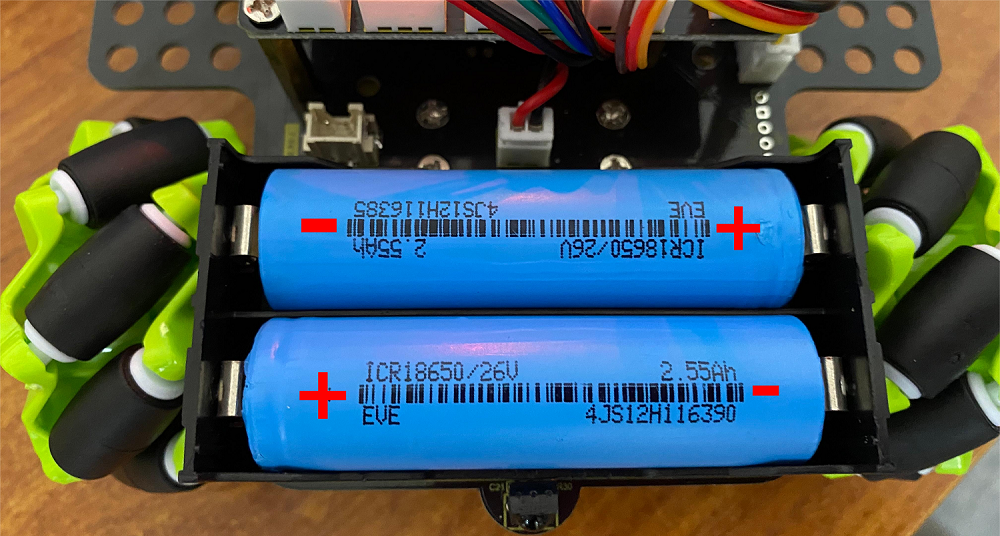
バッテリーの取り付け: