De installatie van de Keyestudio 4WD Mecanum Robot Car V2.0
Stap 1
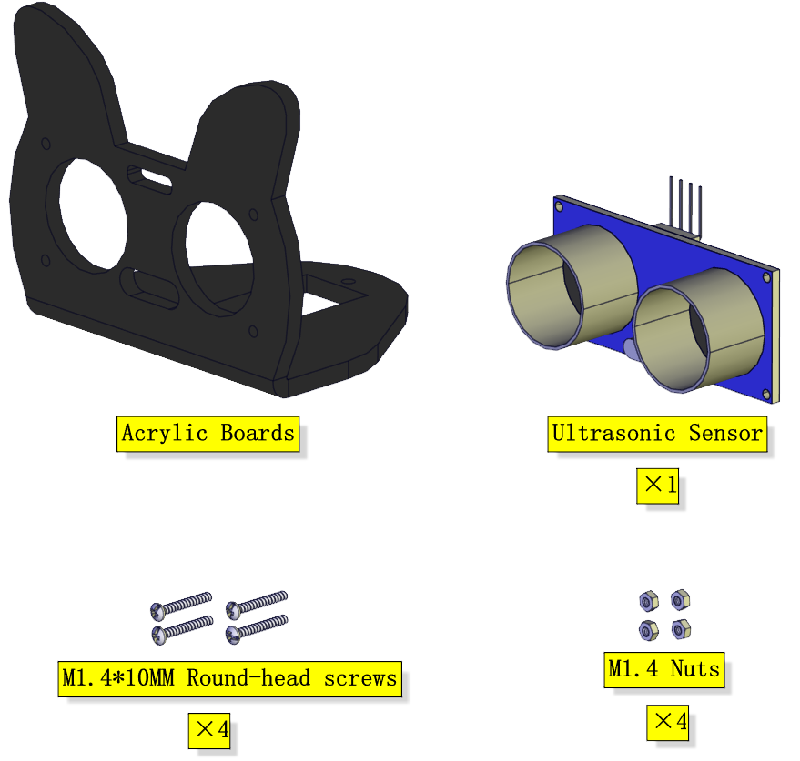
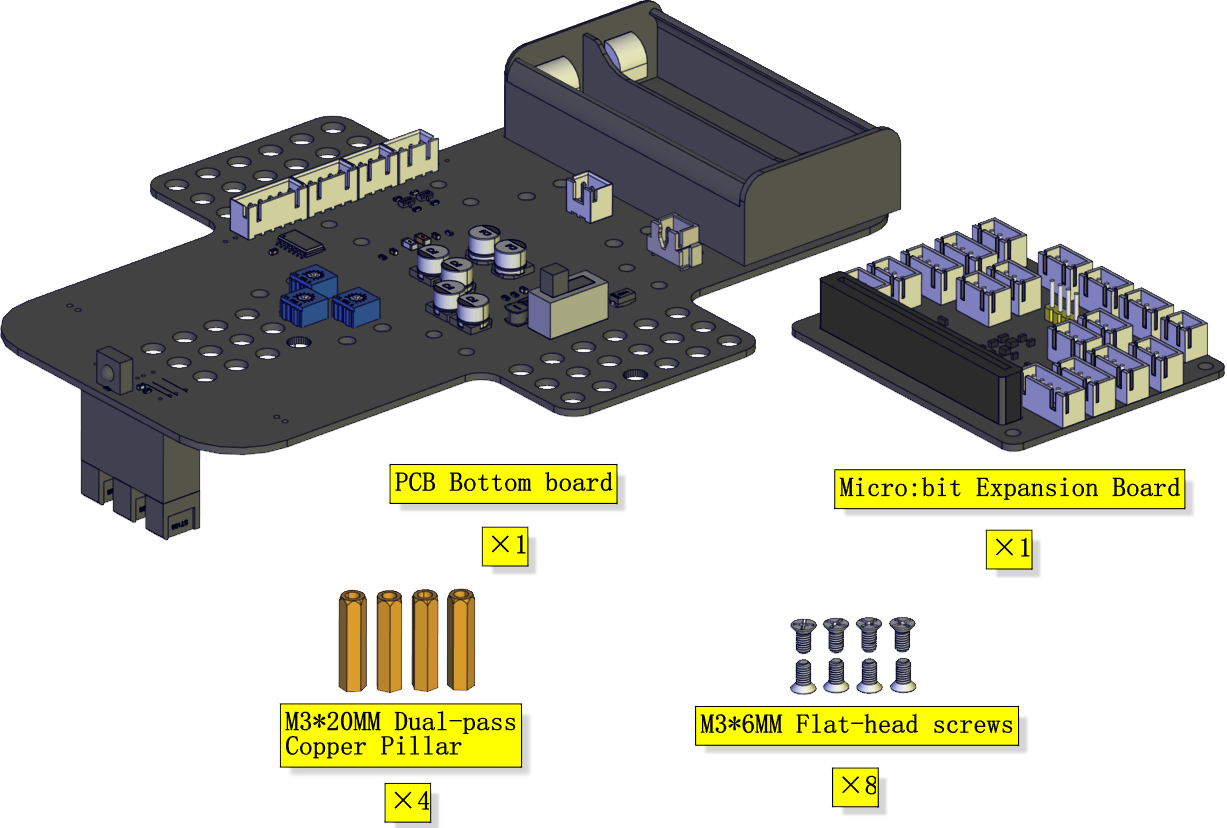
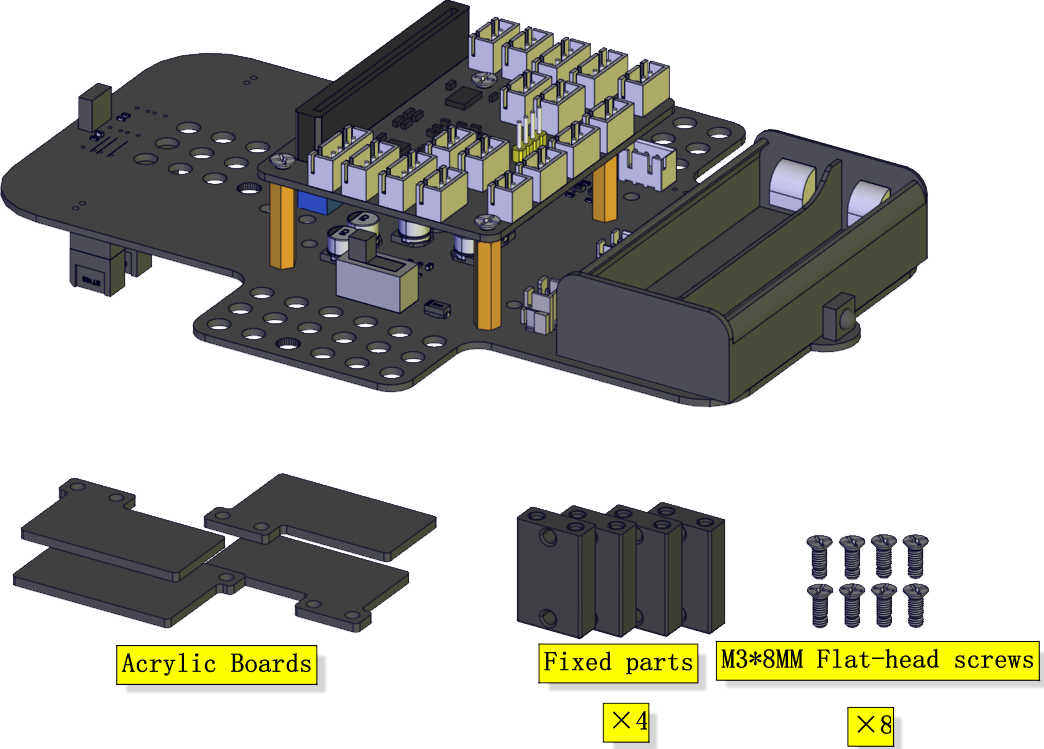
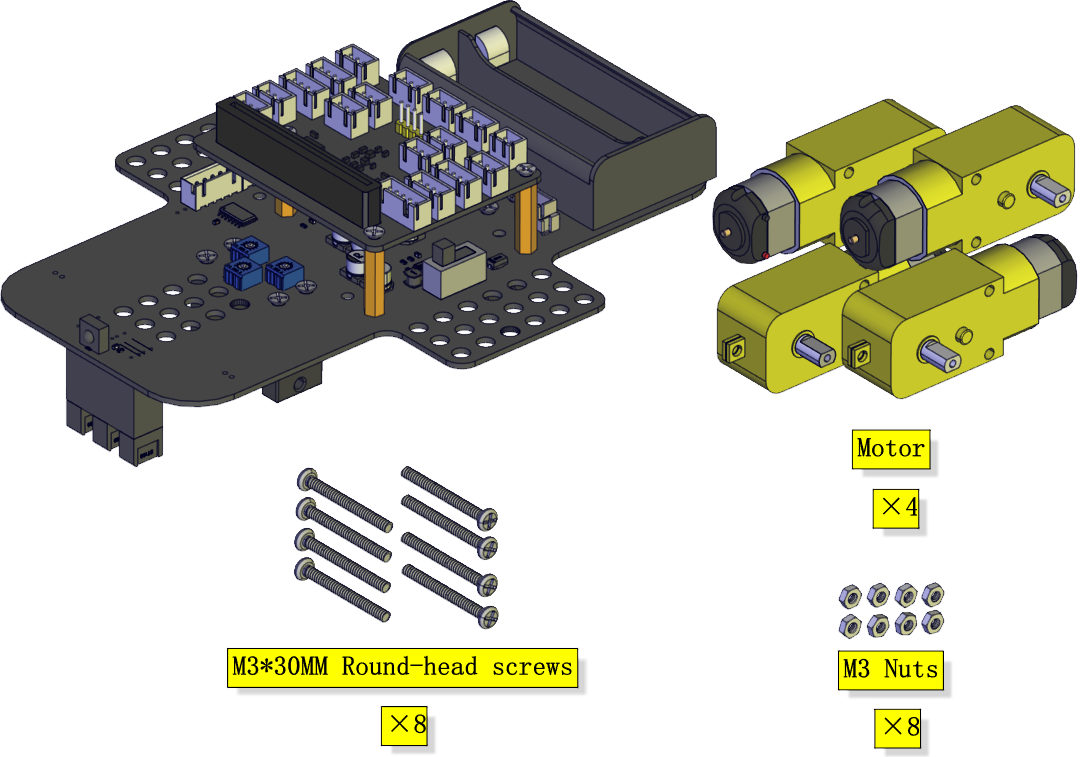
Benodigde componenten:
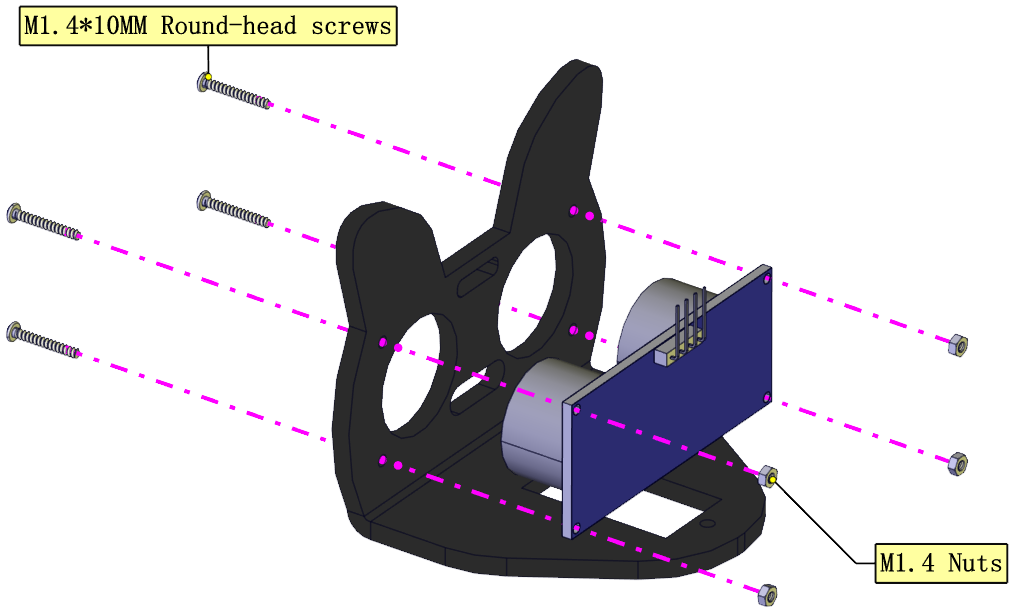
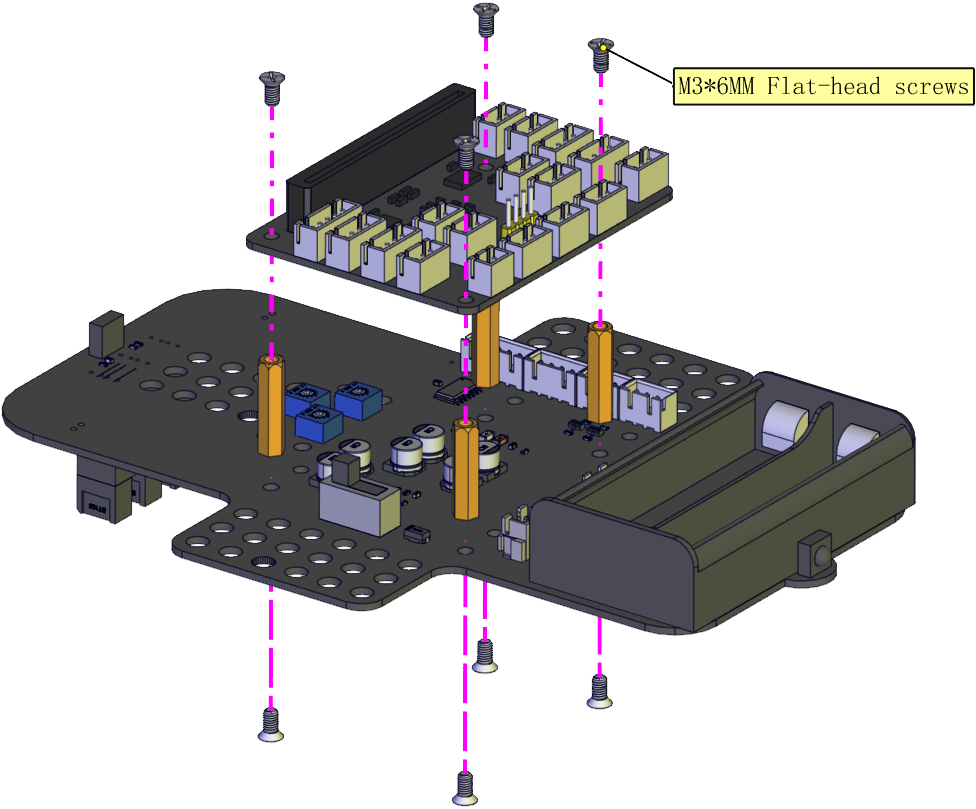
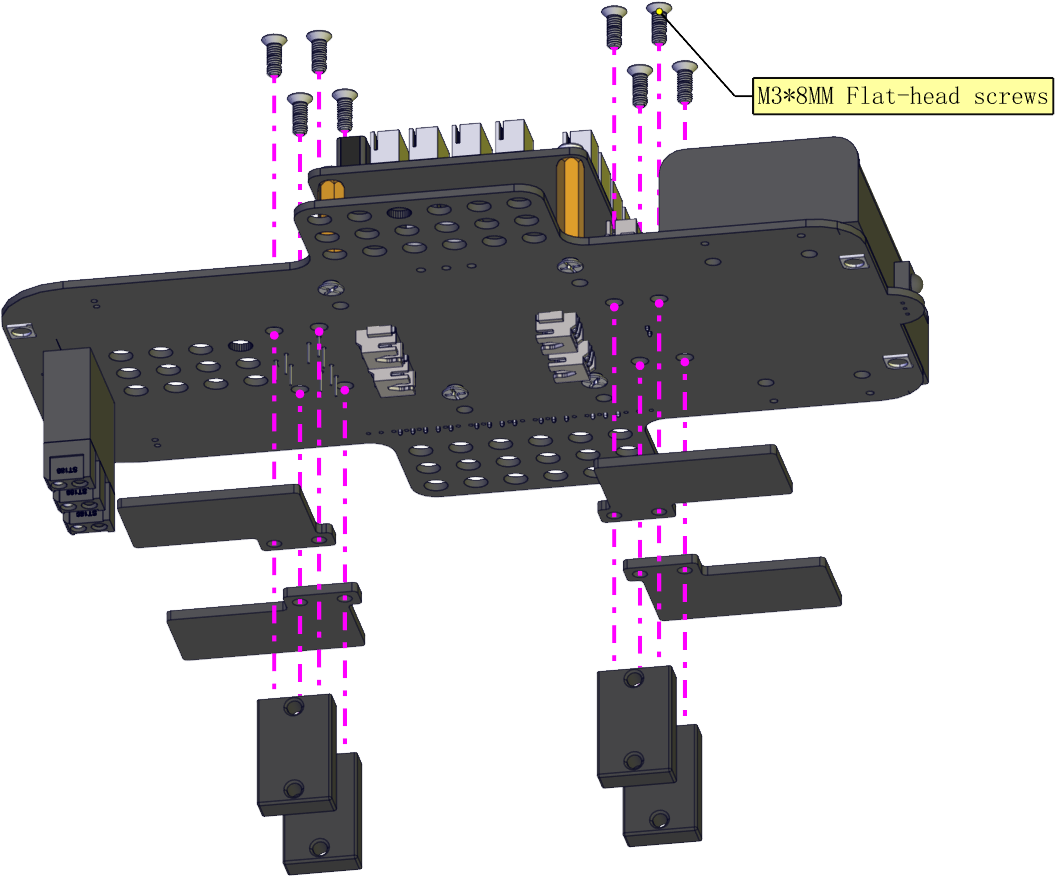
Installatieschema:
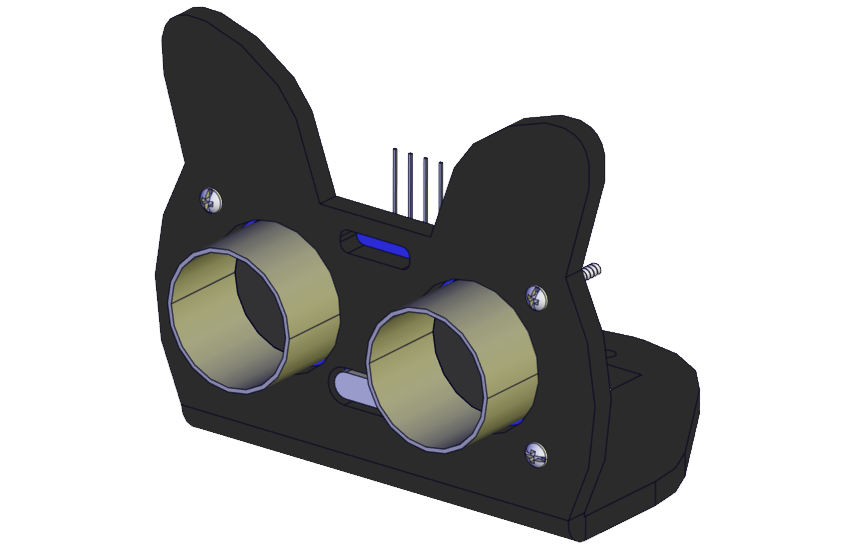
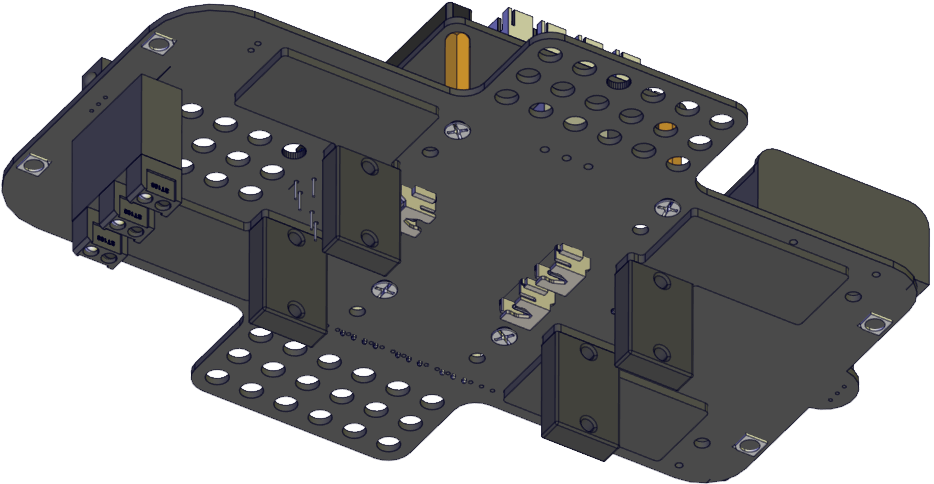
Prototype:
Stap 2
Benodigde componenten:
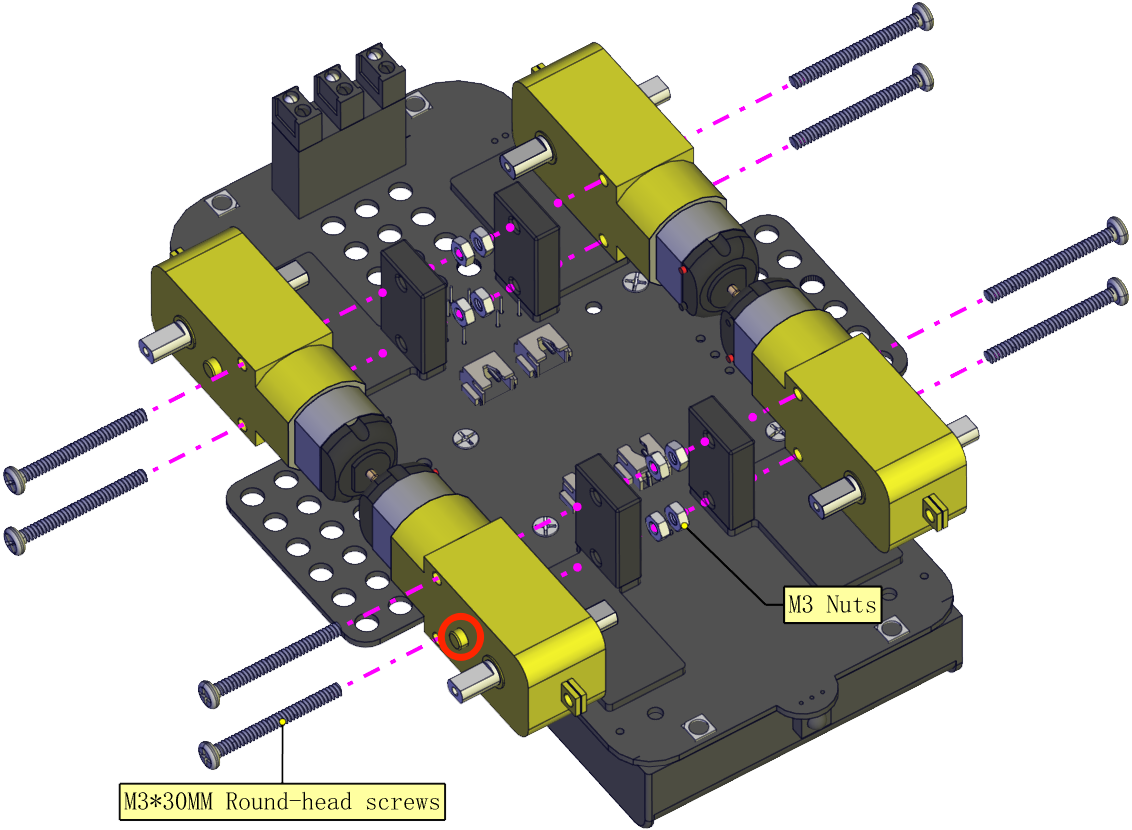
Installatieschema:
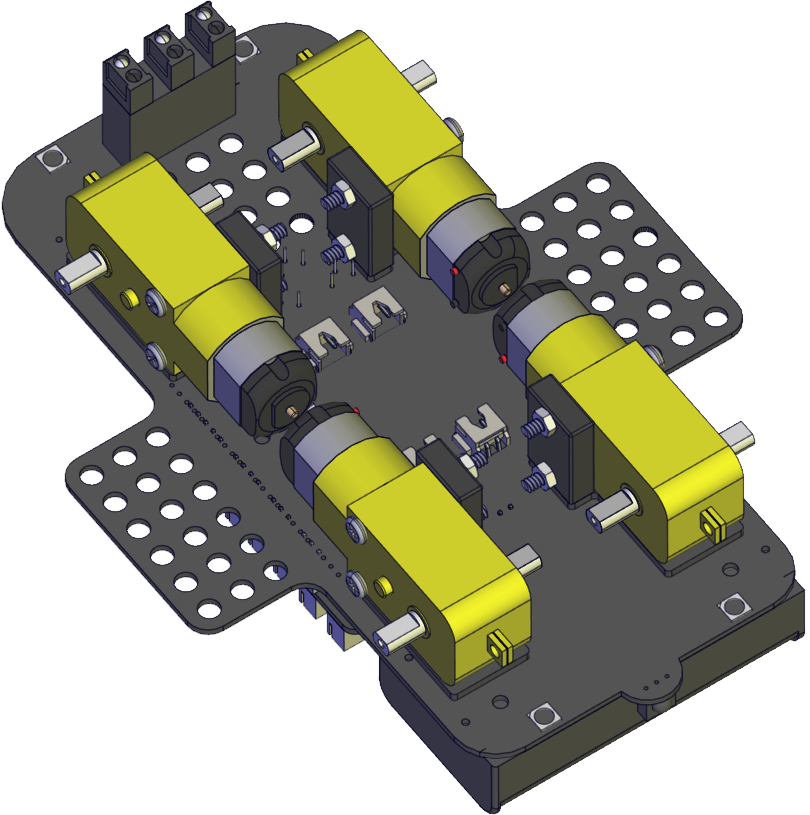
Prototype:
Stap 3
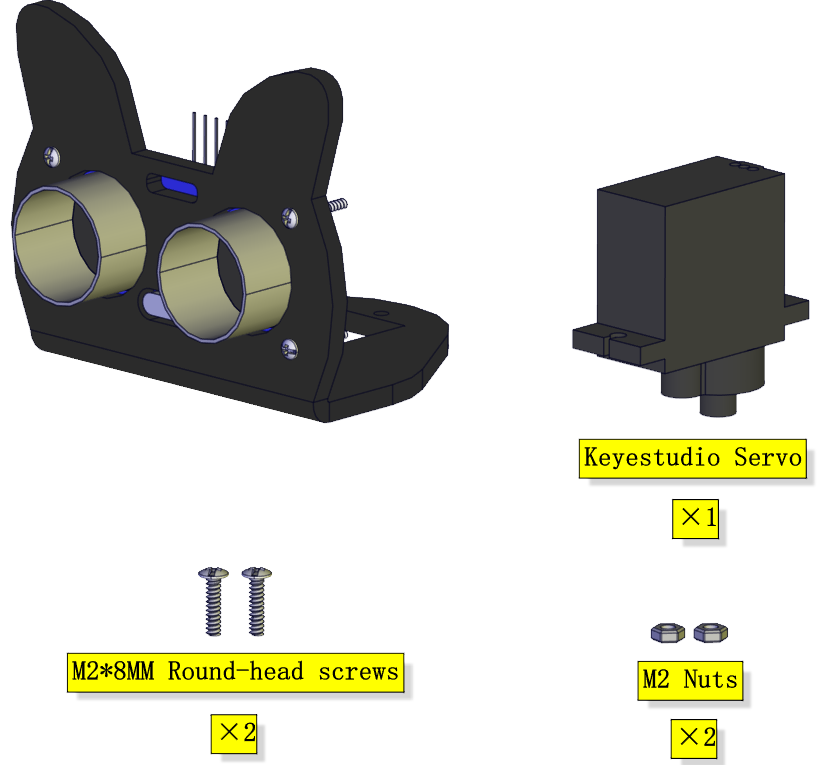
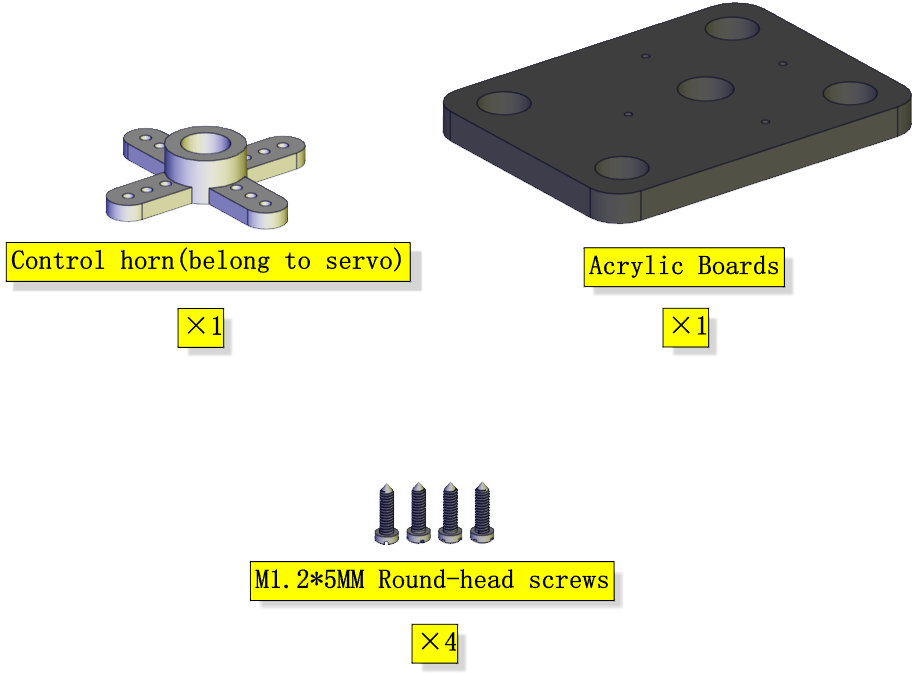
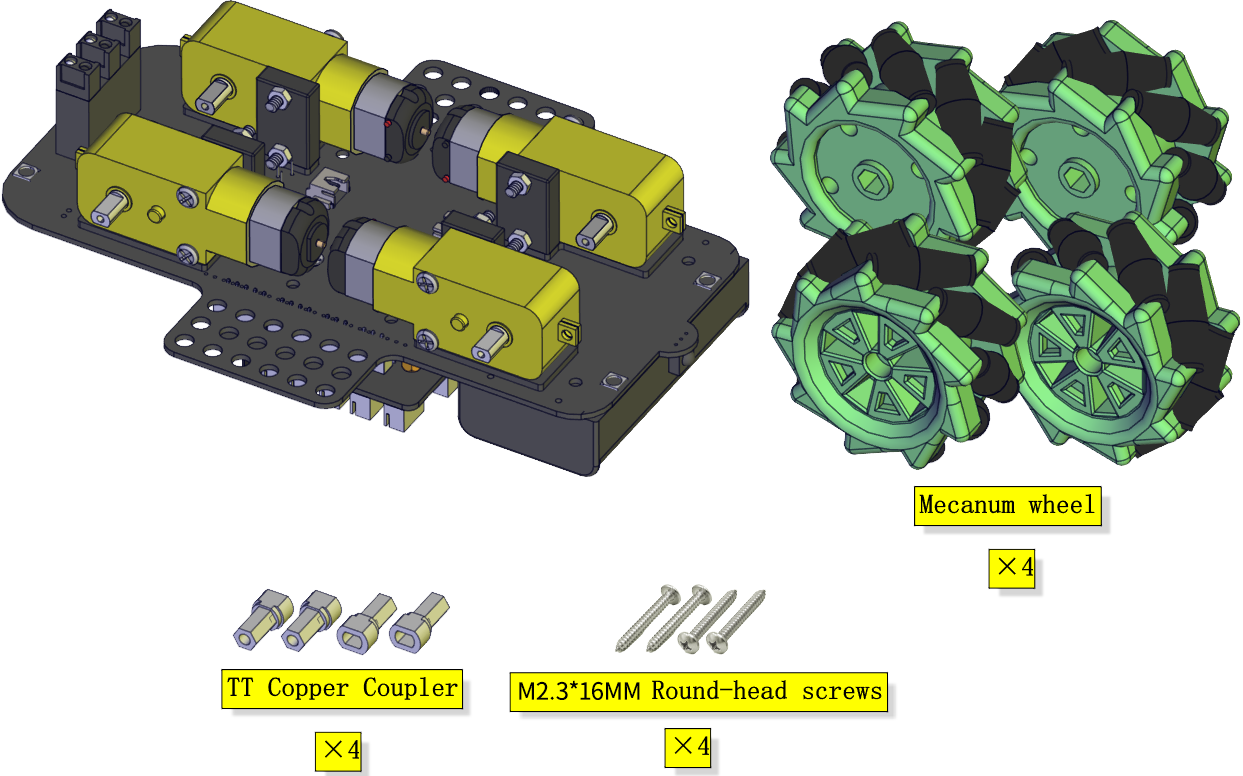
Benodigde componenten:
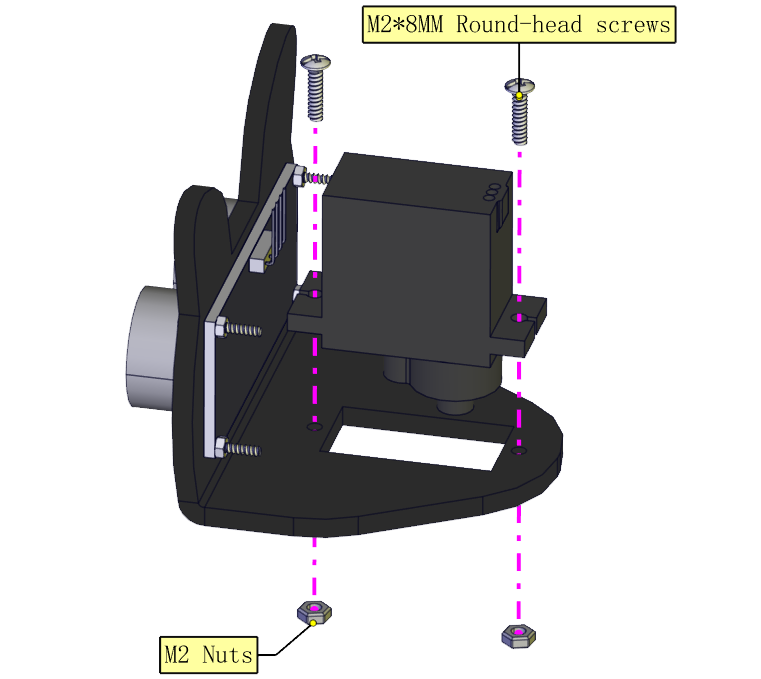
Installatieschema:
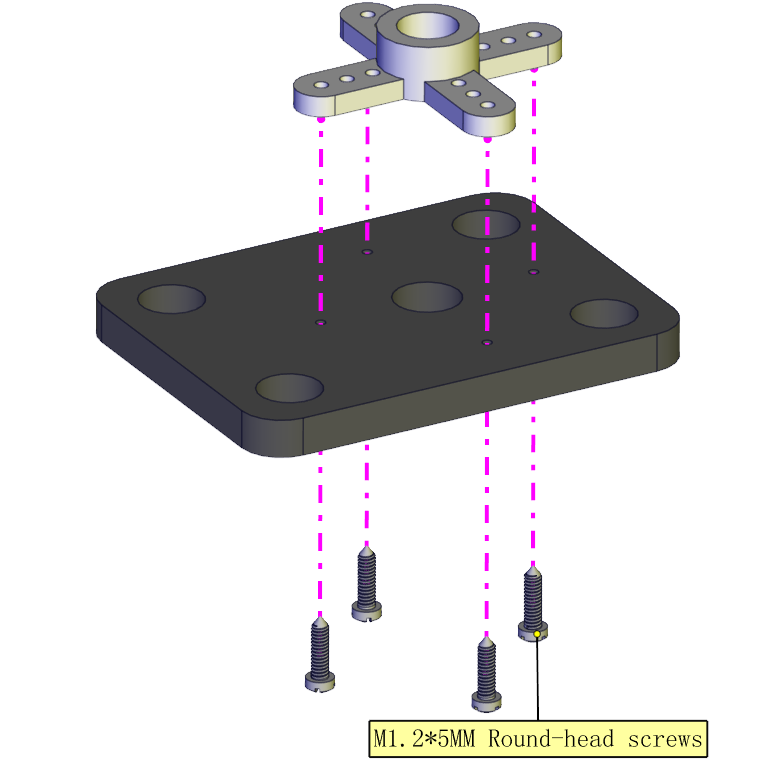
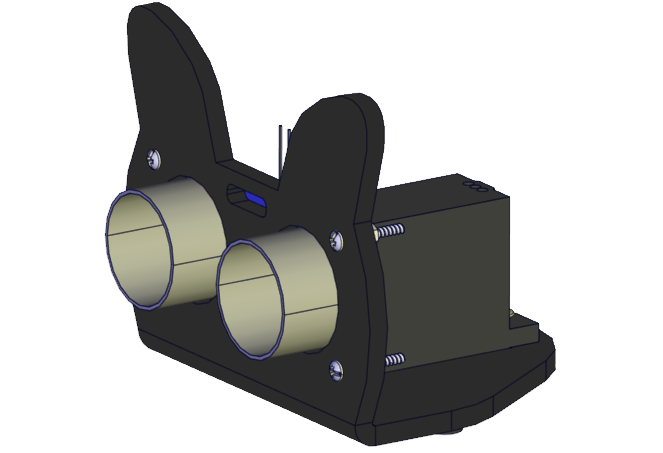
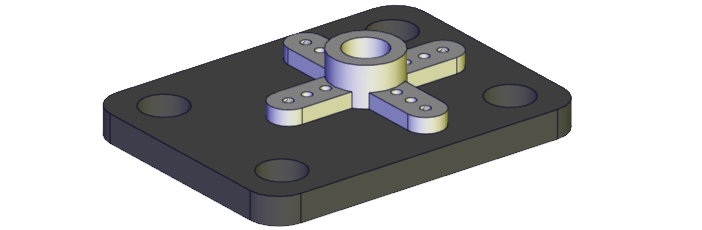
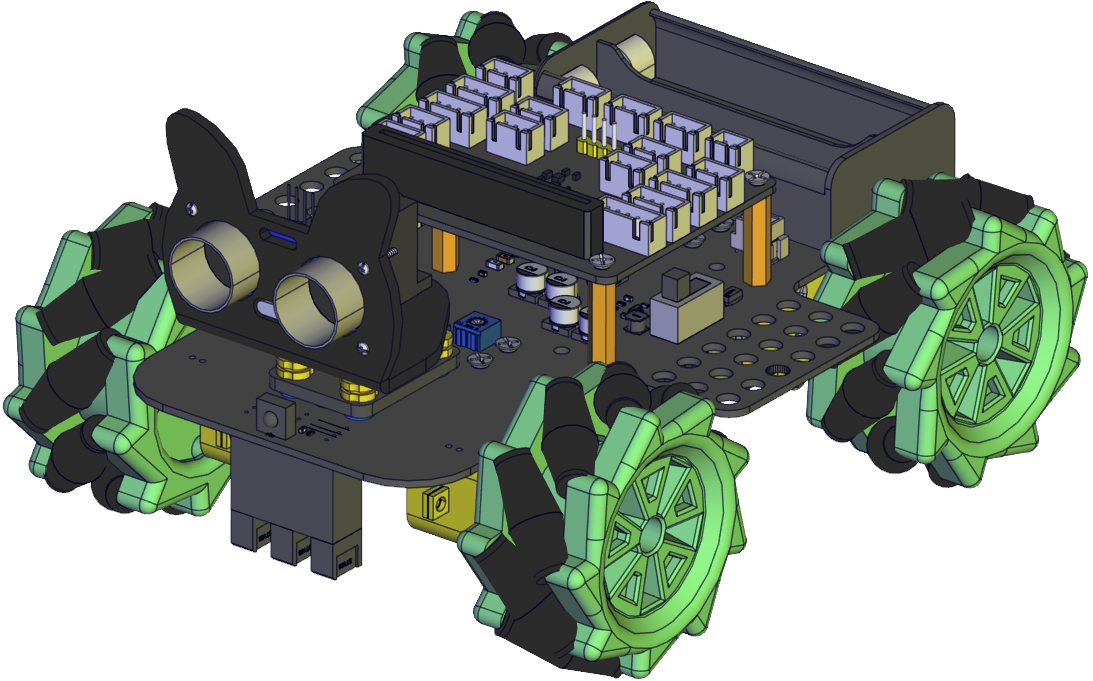
Prototype:
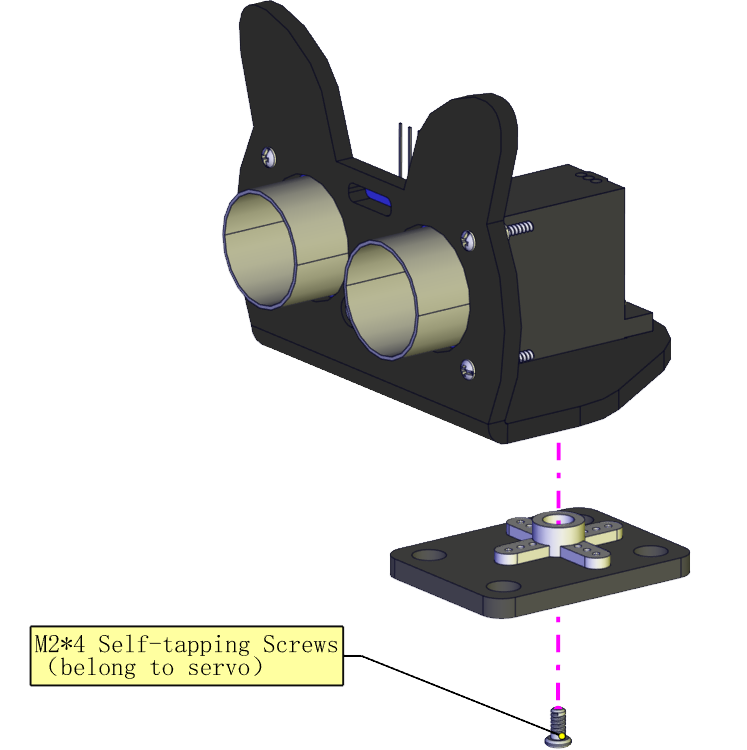
Stap 4
(stel eerst de hoek van de servo af)
Stel de hoek van de servo in op 90 graden.
Methode 1: MakeCode-code
⚠️Bijzondere opmerking: Voordat u de code schrijft en uploadt, moet u de MakeCode IDE begrijpen en bibliotheekbestanden toevoegen. Ga naar de volgende link: Get Started with makecode

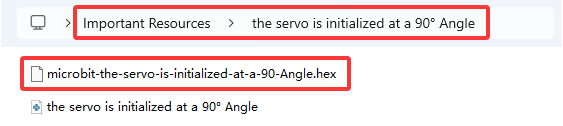
De bovenstaande MakeCode-code wordt meegeleverd in het materiaal. Open de afstelcode voor de servo en schrijf deze naar het microbit‑board van de 4WD Mecanum Robot Car V2.0, en zet stroom via micro USB‑kabel of externe voeding (zet de DIP switch op ON). Dat is alles. De code bevindt zich op de positie zoals in de afbeelding getoond:
Methode 2:Python-code
⚠️Bijzondere opmerking: Voordat u de code schrijft en uploadt, moet u de Mu IDE installeren en bibliotheekbestanden toevoegen. Ga naar de volgende link: Get Started with Python
# import microbit related libraries
from microbit import *
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
sleep(1000)
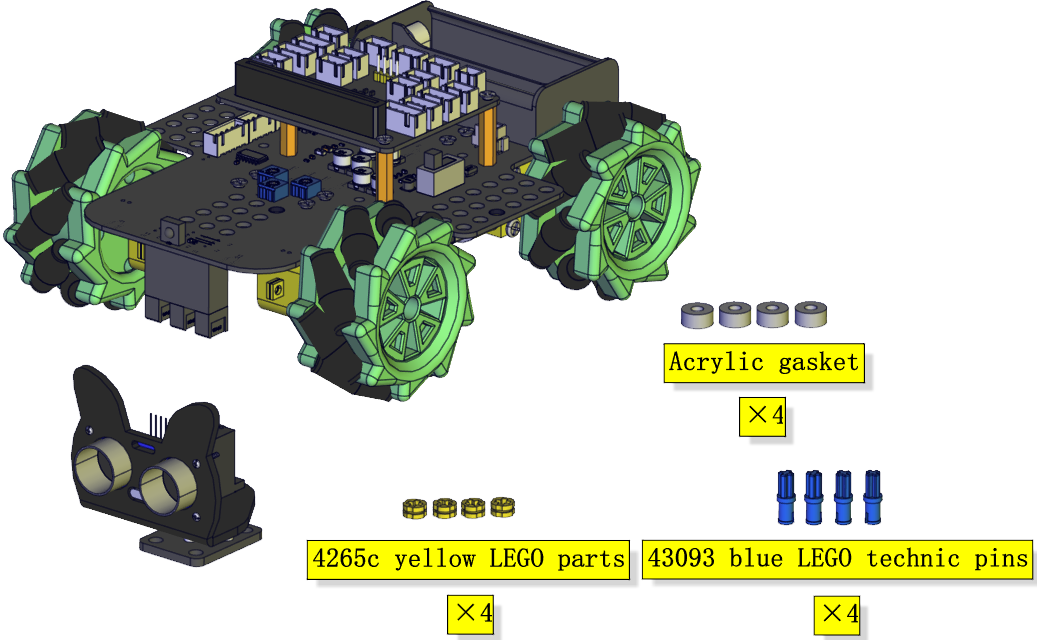
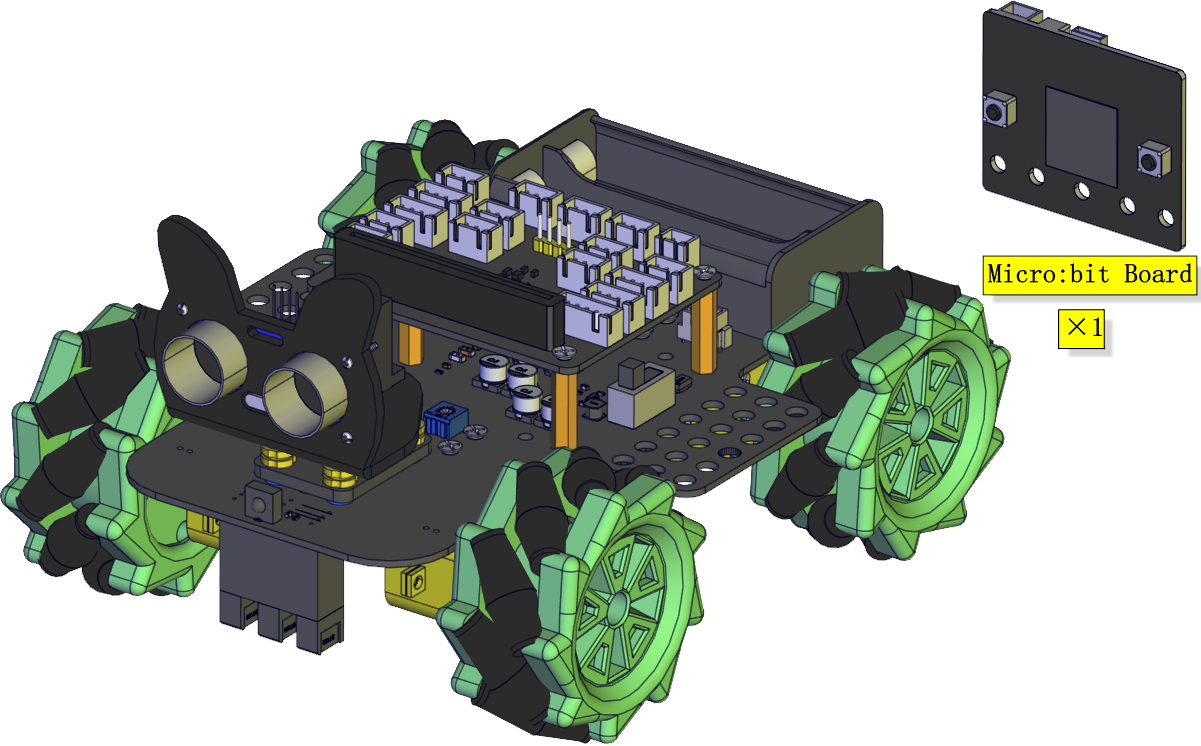
Benodigde componenten:
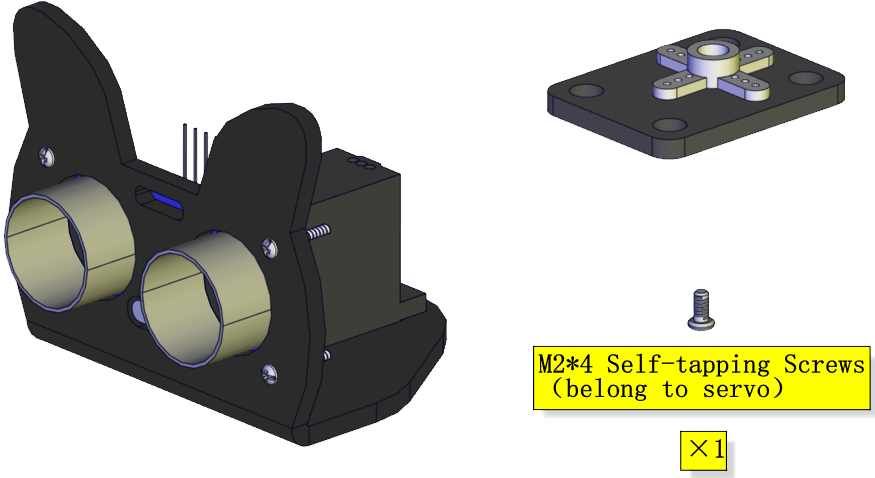
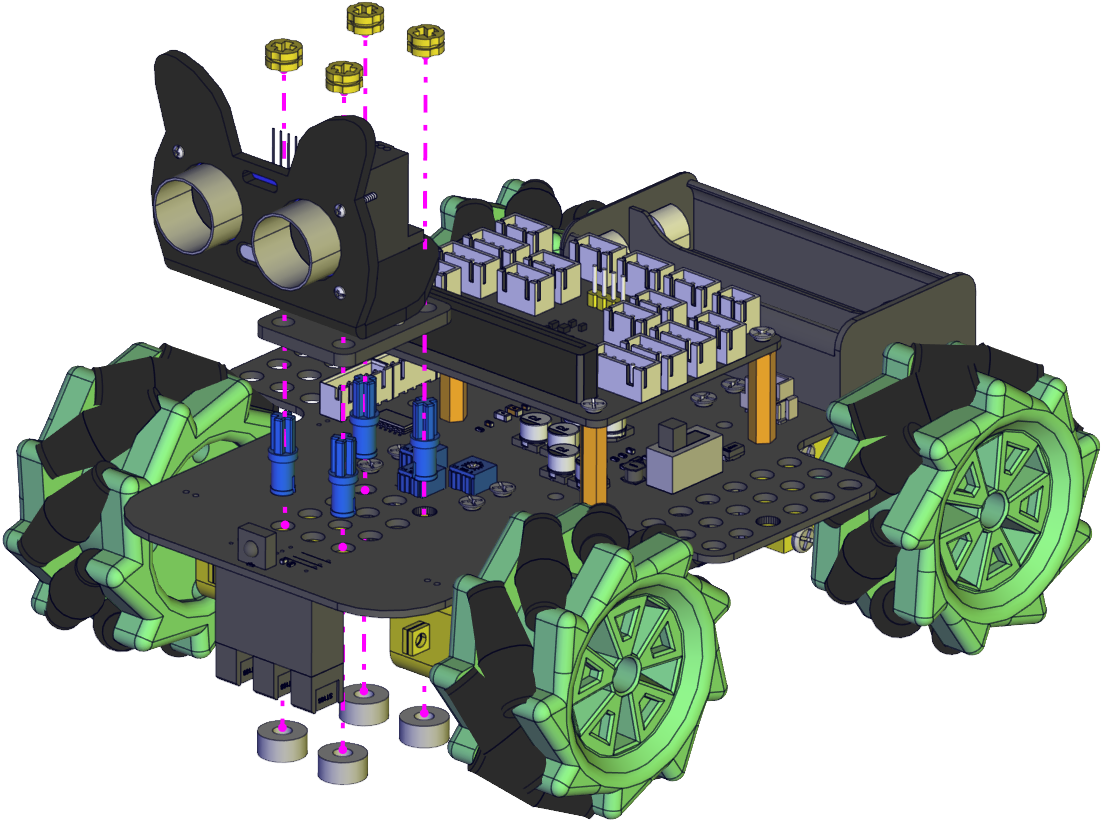
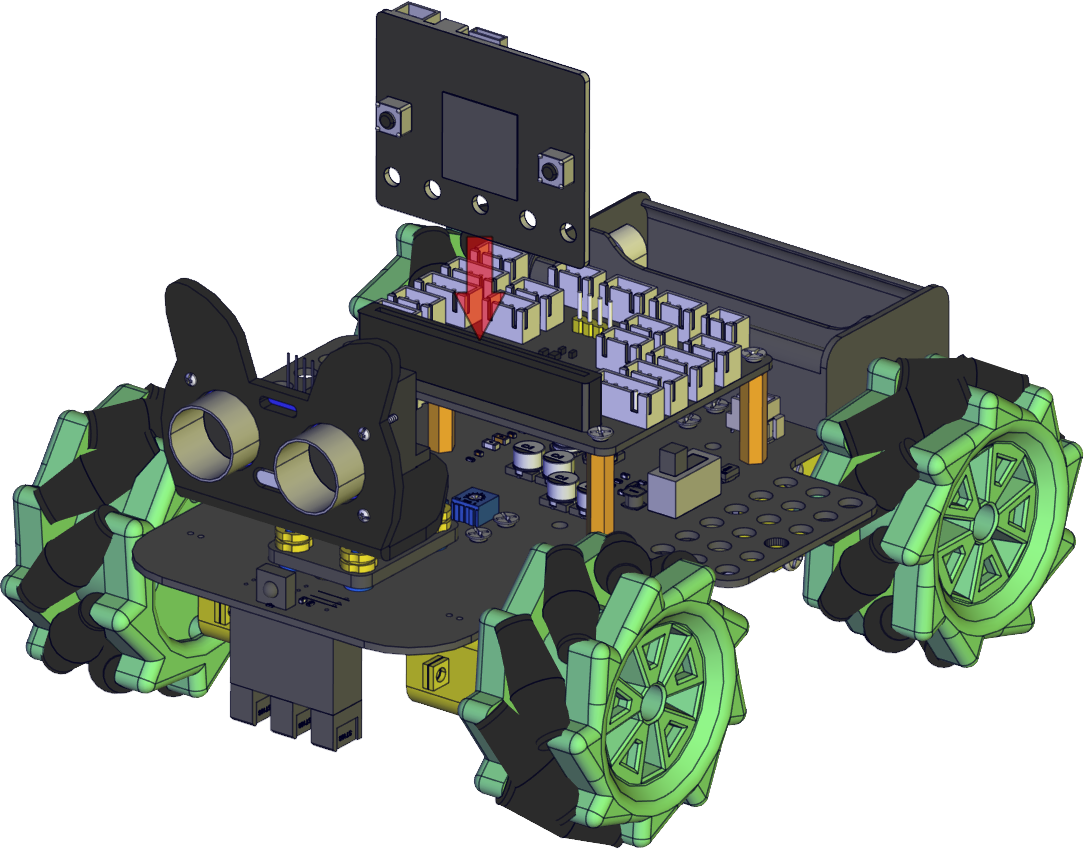
Installatieschema: (let op de montagerichting)
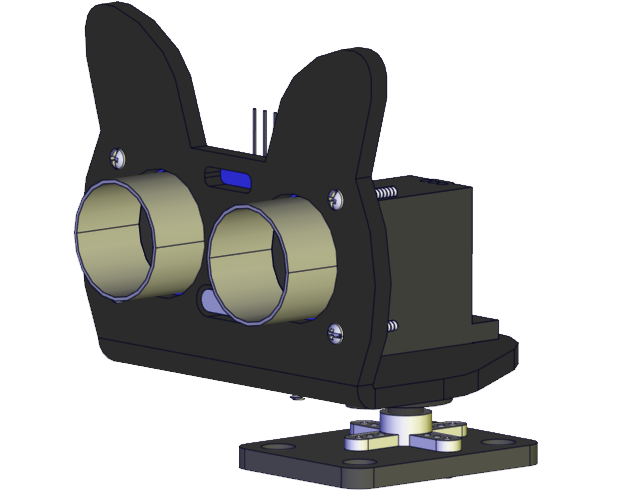
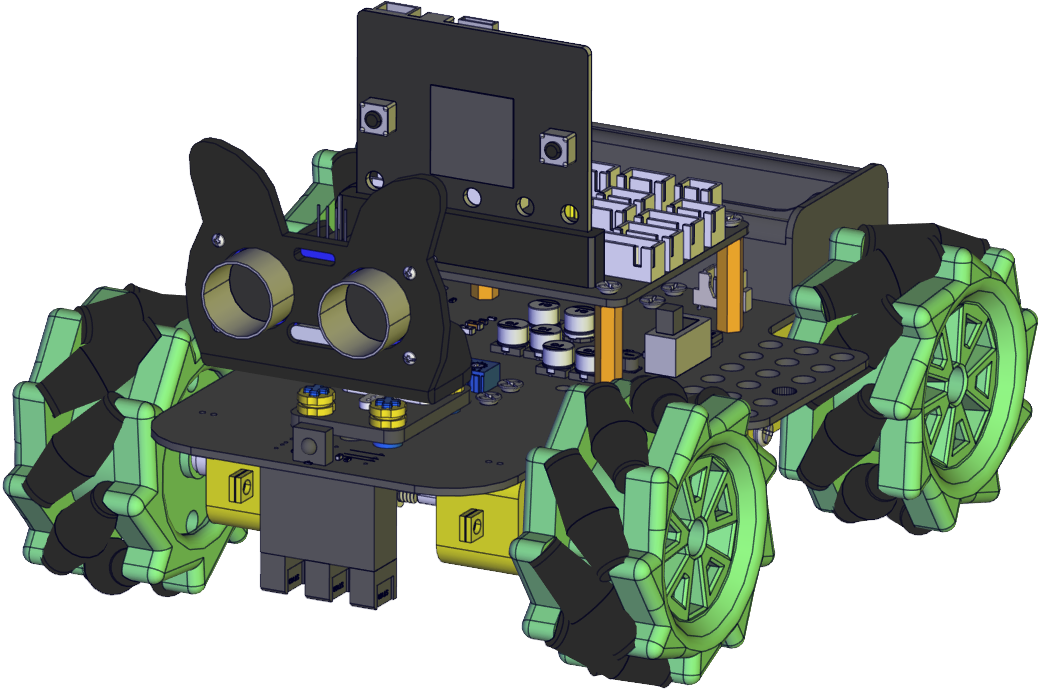
Prototype:
Stap 5
Benodigde componenten:
Installatieschema:
Prototype:
Stap 6
Benodigde componenten:
Installatieschema:
Prototype:
Stap 7
Benodigde componenten:
Installatieschema: (let op de richting van de motor)
Prototype:
Stap 8
Benodigde componenten:
Installatieschema: (let op de montage richting van het mecanum-wiel)
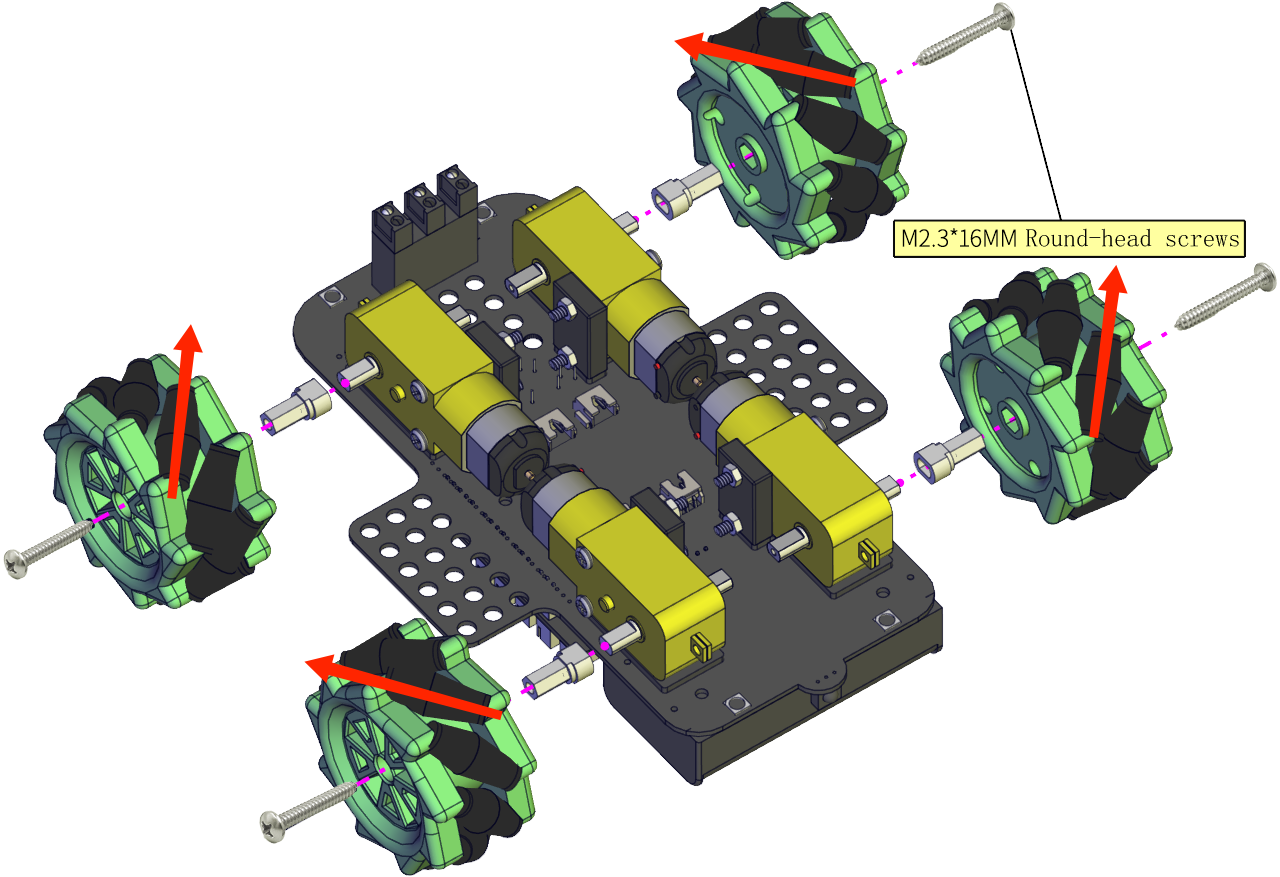
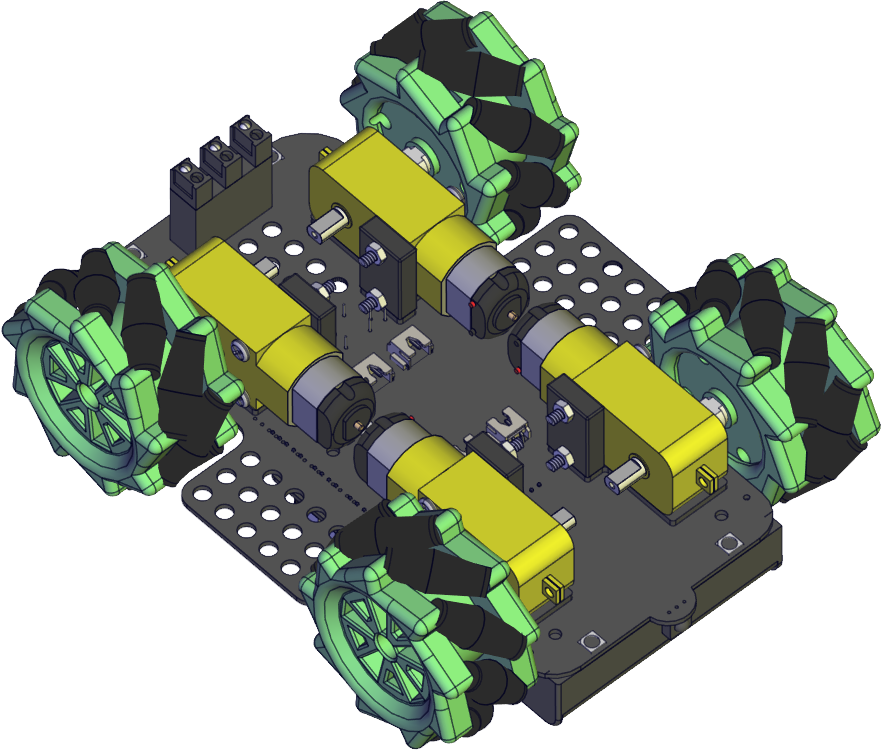
Prototype:
Stap 9
Benodigde componenten:
Installatieschema:
Prototype:
Stap 10
Benodigde componenten:
Installatieschema:
Prototype:
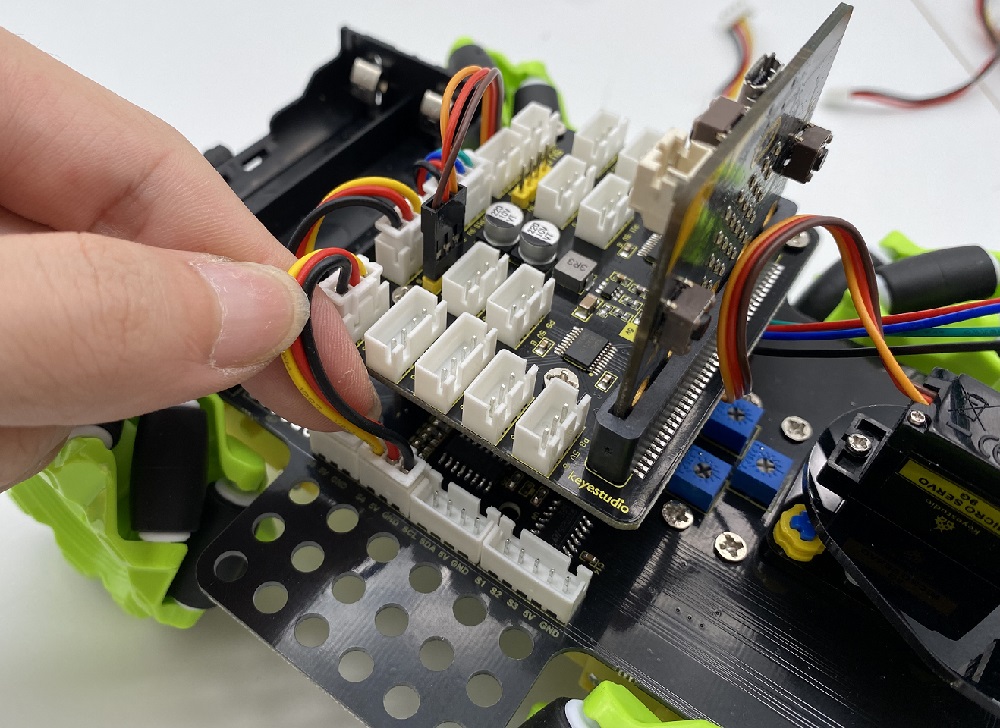
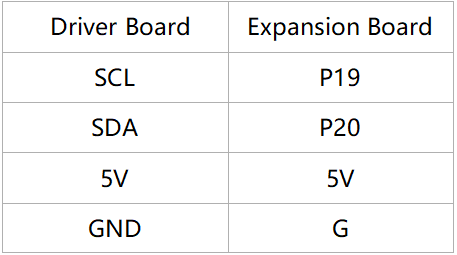
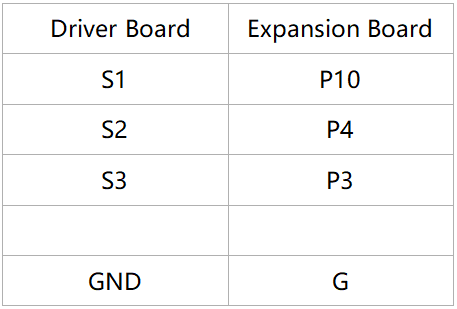
Bedradingsschema
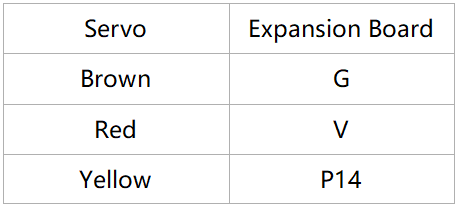
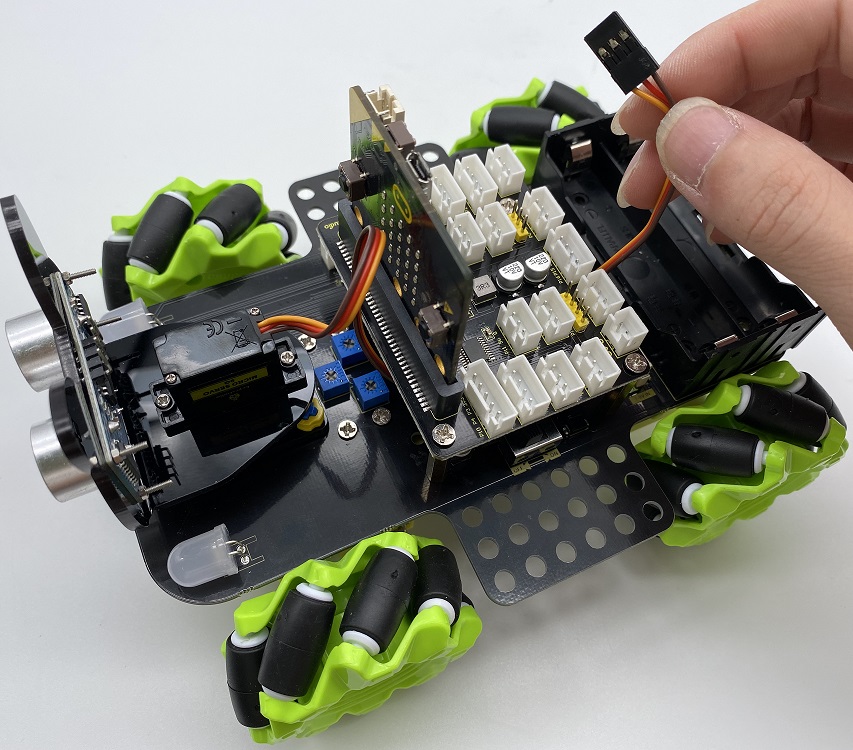
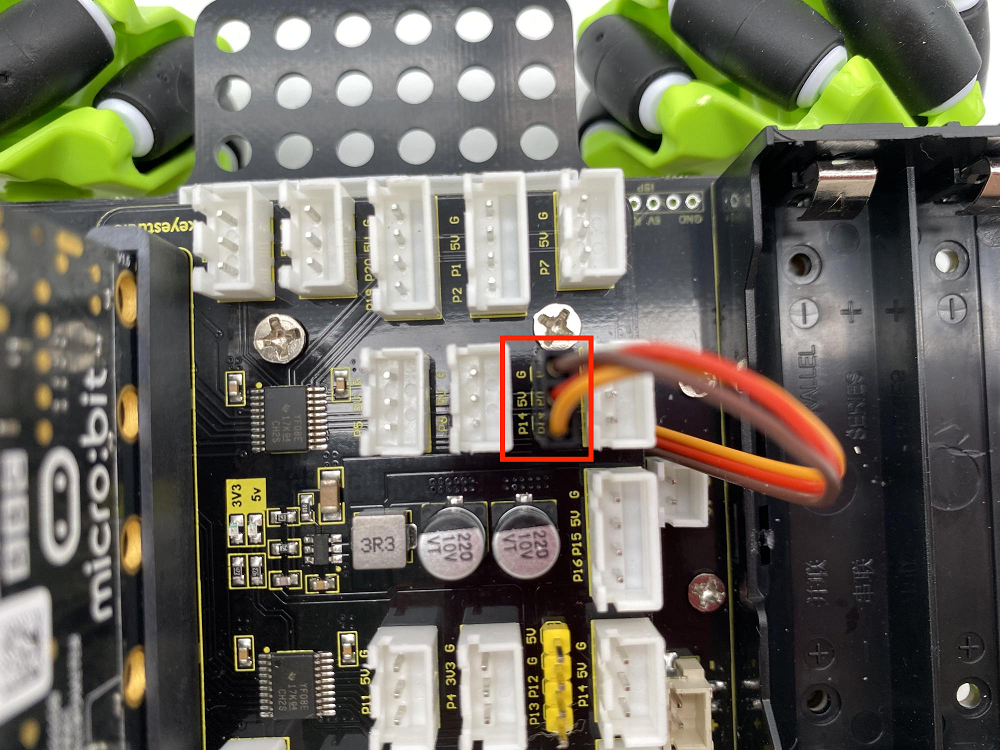
De bedrading van de servo:
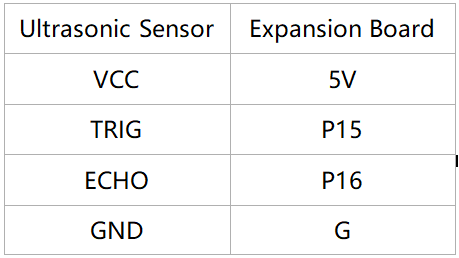
De bedrading van de ultrasone sensor:

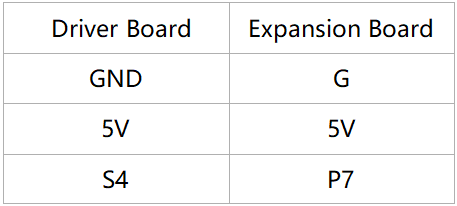
De bedrading van de IR-ontvangermodule:
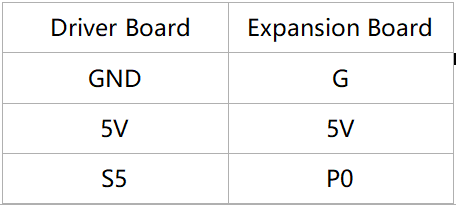
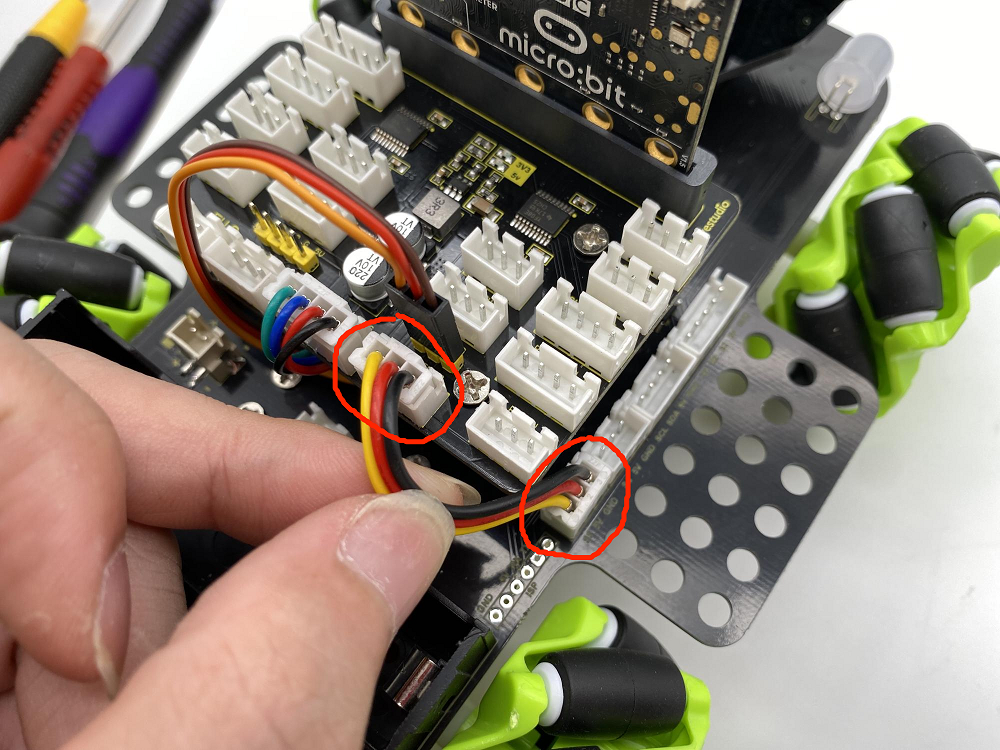
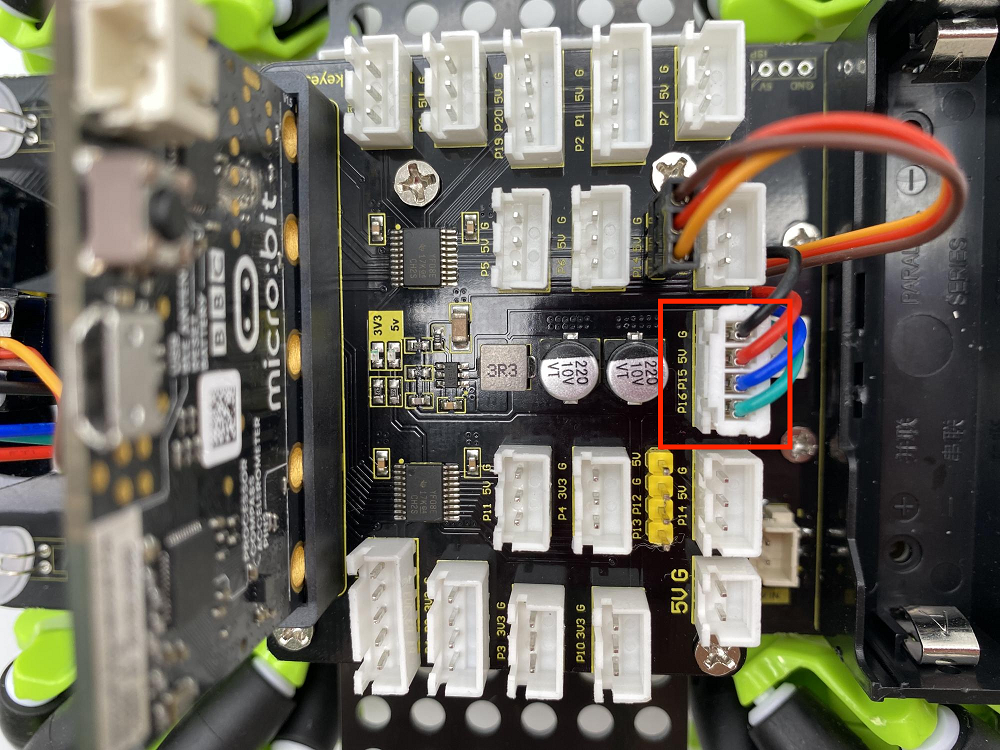
De bedrading van de RGB:
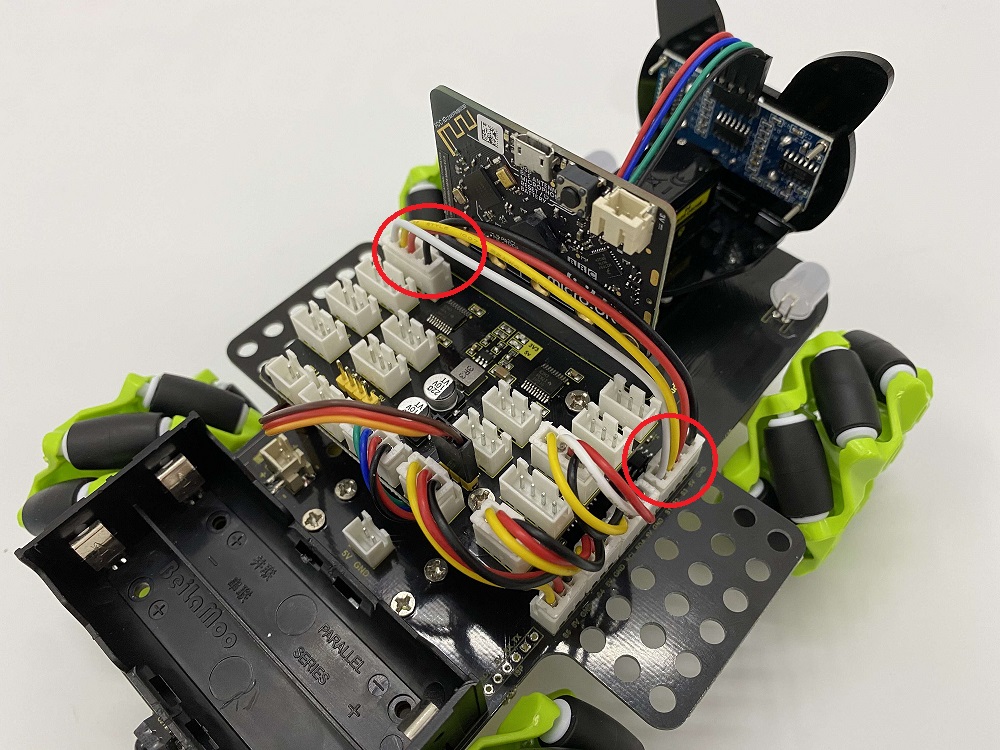
De bedrading voor het aansturen van de motor en de zeven-kleurige lamp:
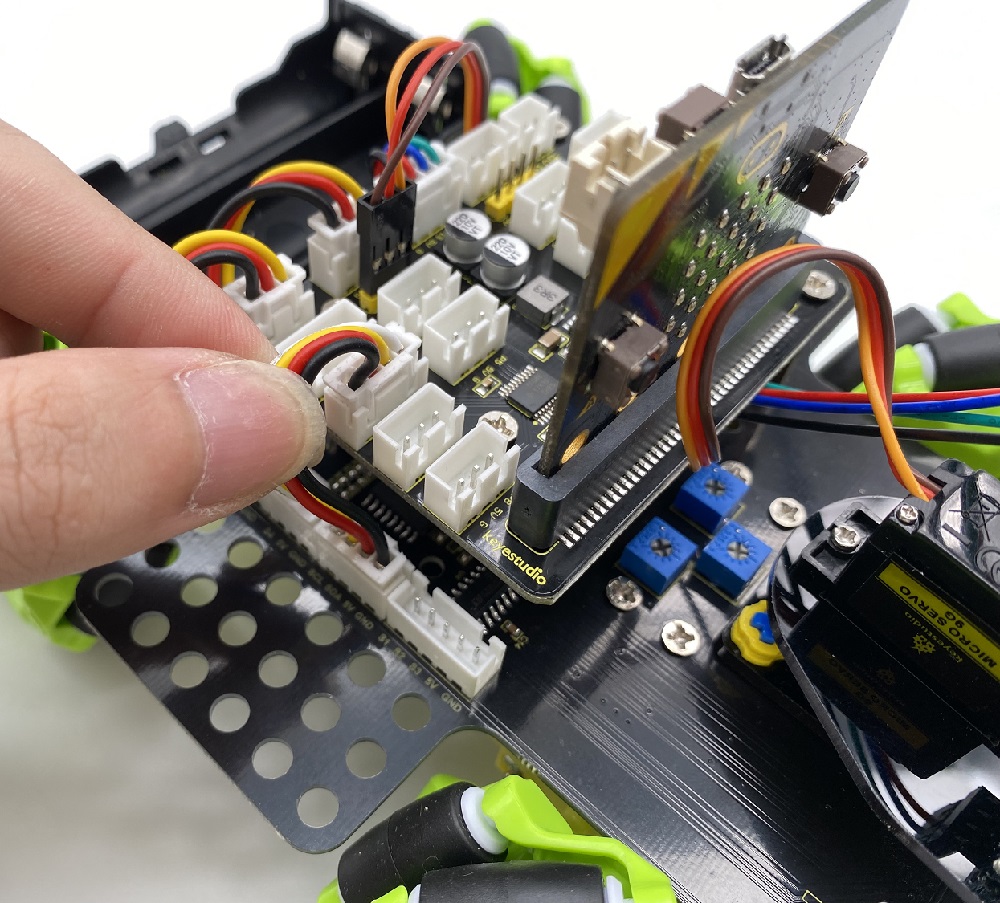
De bedrading voor het aansturen van de 3-kanaals lijnvolgsensor:
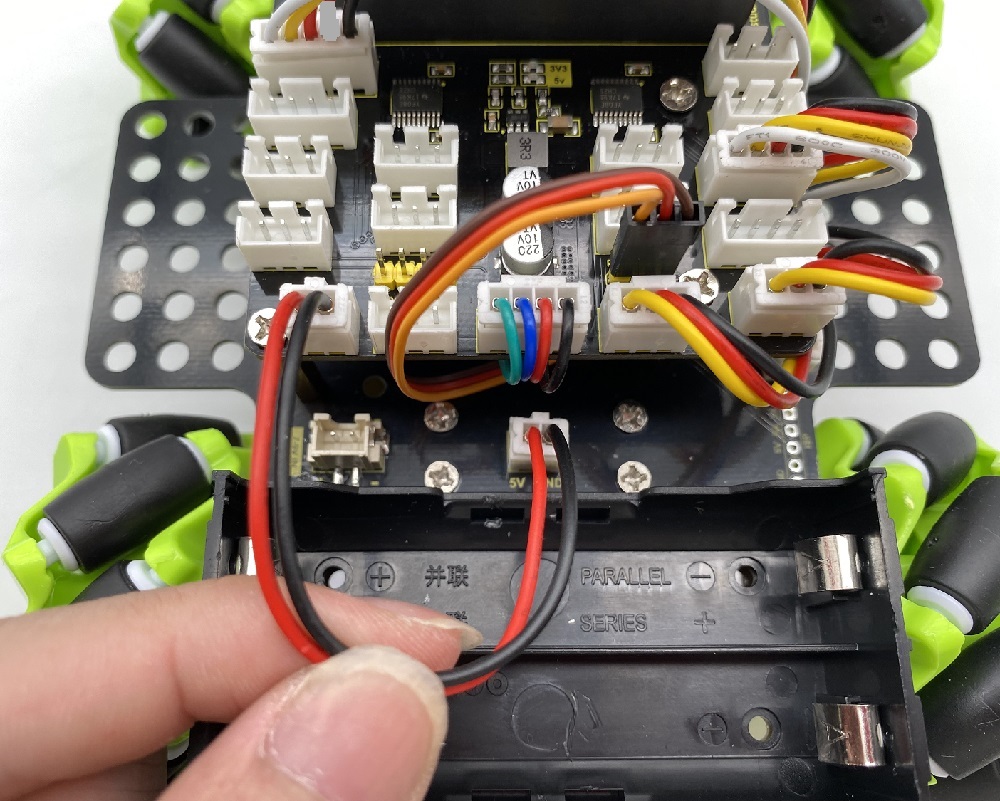
De bedrading van de voeding:
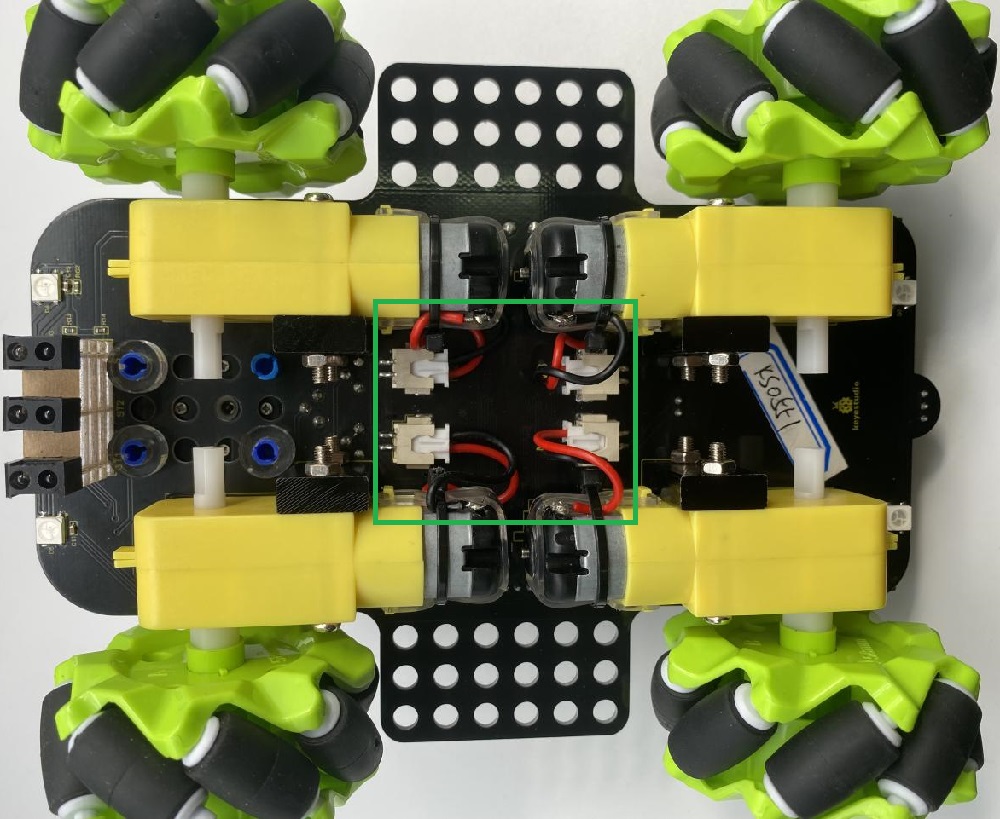
De corresponderende interface van de motor:
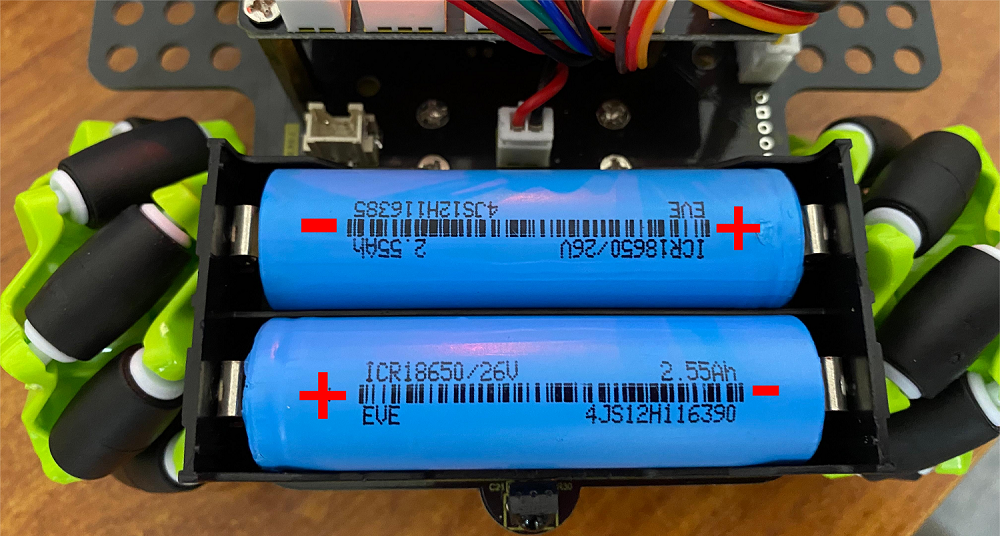
De installatie van de batterij: