Makecode Tutorial
Download codebestand
Opmerking: Alle cursuscode is hier te downloaden. Downloadlinks worden later niet meer verstrekt. Om te voorkomen dat u het vergeet, raden we u aan de code nu te downloaden voor toekomstige tutoriallessen.
1. Aan de slag met micro:bit
1.1 Introductie
De micro:bit is een computer op zakformaat met ingebouwde sensoren en uitgangen. Je kunt hem gebruiken om fysieke computerprojecten te maken die interactie hebben met de echte wereld, van robots tot muziekinstrumenten en meer.
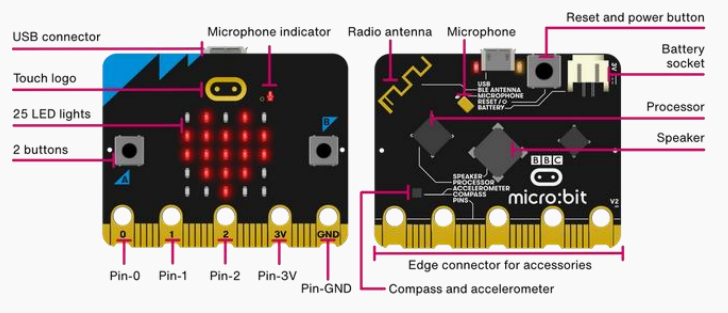
1.2 Maak kennis met de Micro:bit
Nieuwe micro:bit (V2)
Originele micro:bit (V1)
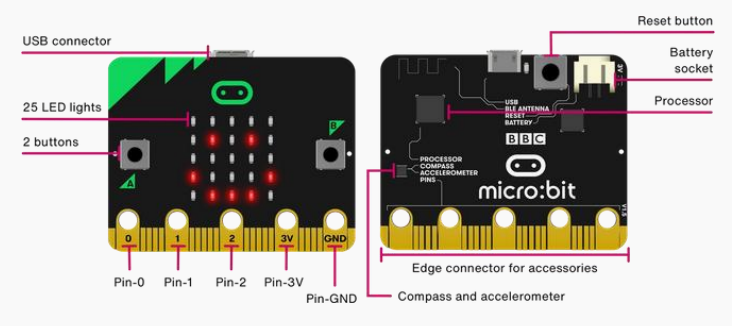
De volgende inhoud is geleend van Kitronik University micro:bit bronnen en handleidingen.
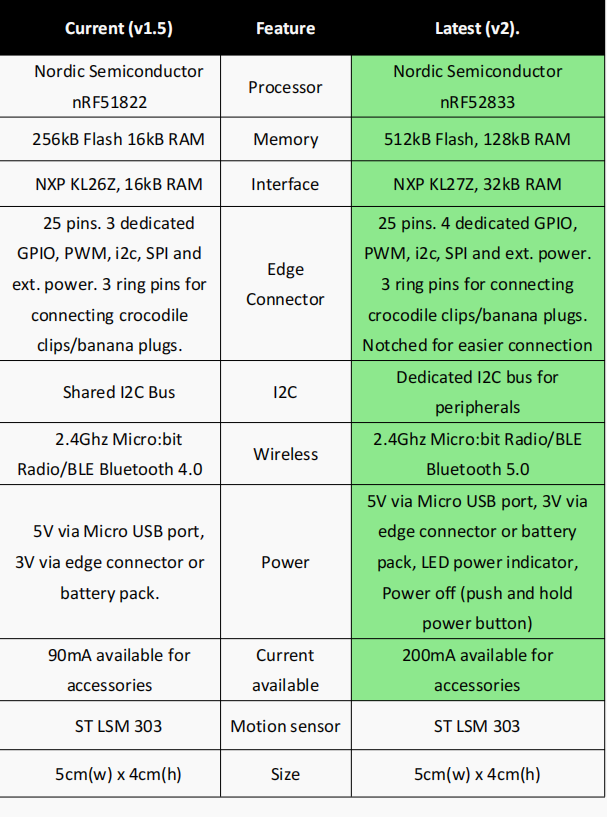
De onderstaande tabel geeft een overzicht van alle functies voor beide borden voor een veel eenvoudigere vergelijking, nieuwe of verbeterde functies zijn groen gemarkeerd.
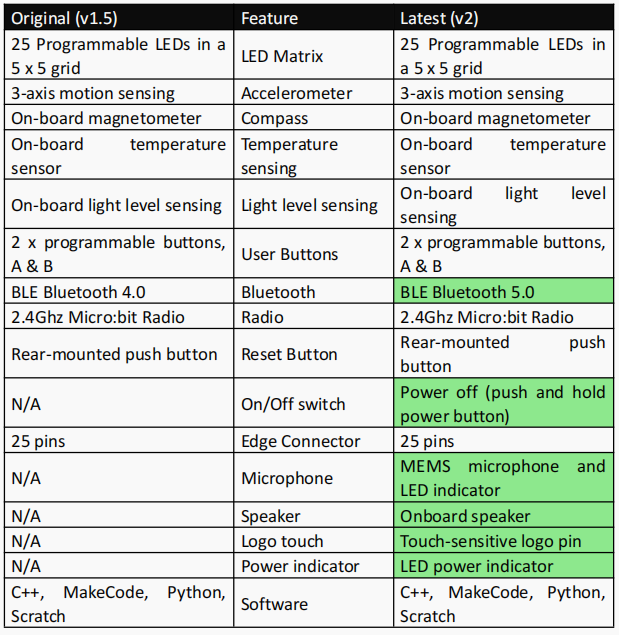
Het V2-bord heeft ook een aantal bruikbaarheidsverbeteringen, namelijk:
Gekartelde randconnector. Om het gemakkelijker te maken om dingen zoals krokodillenklemmen en ook geleidende draad aan te sluiten.
Voedings-LED-indicator. Naast de USB-activiteitsindicator.
Vergulde antenne. Om de radio- en Bluetooth-component gemakkelijk te identificeren.
De nieuwe micro:bit-luidspreker werkt hetzelfde als wanneer je momenteel een luidspreker op de micro:bit aansluit en de geluidsuitvoer zal zowel op de luidspreker als op de randconnector zijn. De nieuwe microfoonblokken in de MakeCode-editor stellen je in staat om code te schrijven die reageert op geluid.
De technische specificaties van micro:bit V1 en micro:bit V2:
Veel van de ingebouwde technologie is ook verbeterd. De processor en het geheugen zijn geüpgraded, wat ook upgrades van andere ingebouwde technologieën mogelijk heeft gemaakt.
De onderstaande tabel geeft een overzicht van de belangrijkste technische specificaties voor beide borden voor een veel eenvoudigere vergelijking, nieuwe of verbeterde functies zijn groen gemarkeerd.
1.3 Code uploaden
Een browser om de MakeCode-editor uit te voeren:https://makecode.micro:bit.org/
Code overzetten naar de Micro:bit
Code overzetten naar de Micro:bit Naast de WebUSB-methode die in de bovenstaande geanimeerde gif wordt gedemonstreerd, kunt u de code ook downloaden en rechtstreeks naar de stationsletter van de Micro:bit kopiëren. Deze aanpak is vaak betrouwbaarder, aangezien WebUSB-downloads kunnen mislukken vanwege browsergerelateerde problemen. Natuurlijk biedt WebUSB meer gemak. Als een methode mislukt tijdens uw codeoverdracht, probeer dan de andere aanpak.
Het gebruik van de WebUSB-downloadmethode slaat de code niet op uw lokale computer op. Als u een kopie van het programma dat u hebt geschreven wilt bewaren, klikt u op het opslagpictogram (ziet eruit als een diskette en bevindt zich naast uw projectnaam in de MakeCode Editor) om een kopie van het hex-bestand op uw lokale machine op te slaan.
Nadat u uw .hex-bestand hebt overgezet, wordt de micro:bit-schijf losgekoppeld en opnieuw verbonden terwijl de micro:bit opnieuw wordt ingesteld. Als u de inhoud van de micro:bit-schijf bekijkt, ziet u het .hex-bestand niet vermeld, dit is normaal, maar uw hex-bestand wordt wel uitgevoerd.
Safari/Firefox/Overig gebruiken
Opmerking: Zoals ik eerder al zei, kunnen downloads via WebUSB mislukken vanwege browserproblemen, dus als u een andere browser dan Chrome of Edge gebruikt. Het ondersteunt mogelijk geen WebUSB, dus u kunt uw micro:bit niet koppelen met uw computer. Elke keer dat u op de knop ‘Downloaden’ klikt, wordt uw programma niet rechtstreeks naar uw micro:bit overgezet, uw code wordt gedownload als een .hex-bestand. Net zoals u op het opslagpictogram klikt om een kopie van het hex-bestand op uw computer op te slaan. U kunt dit bestand naar uw micro:bit slepen met de bestandsverkenner van uw computer.
Introductie van de MakeCode-editor
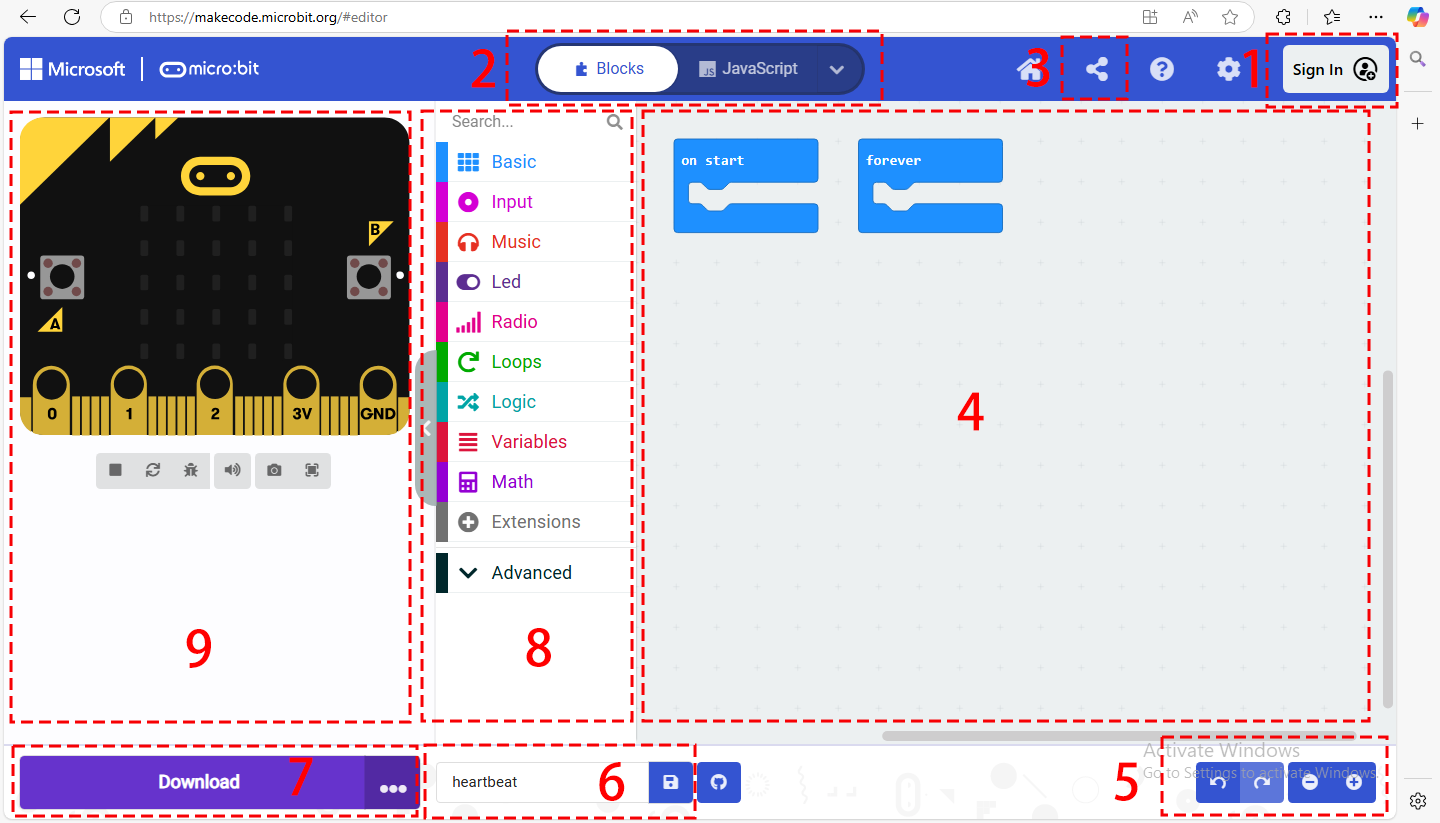
Nu wordt de MakeCode-editor gepresenteerd, dit is het scherm dat u zult gebruiken om uw micro:bit te programmeren.
Hieronder vindt u een korte herinnering aan de verschillende onderdelen van de editor, om u te helpen de interface beter te begrijpen.
# |
Beschrijving |
|---|---|
1 |
Aanmelden — Meld u aan om uw voortgang op te slaan en altijd en overal toegang te krijgen tot uw werk |
2 |
Blokken/JavaScript/Python — Kies uw eigen avontuur door te programmeren in blokken (standaard) of in JavaScript. Niet getoond in de afbeelding, Microsoft heeft uiteindelijk ook een extra optie toegevoegd om de code naar MicroPython te converteren. |
3 |
Delen — Hiermee kunt u uw projectcode op verschillende manieren delen met uw vrienden! |
4 |
Programmaruimte — Hier gebeurt de magie en bouwt u uw programma… waar u “code maakt”. |
5 |
Zoomen/Ongedaan maken-Opnieuw uitvoeren — Soms moet u dingen ongedaan maken, of uitzoomen en rondkijken; dit zijn de knoppen daarvoor. |
6 |
Naam & Opslaan — Geef uw programma een naam en sla het op (download het) naar uw computer als een .hex-bestand. U kunt dit bestand naar uw micro:bit slepen met de bestandsverkenner van uw computer. |
7 |
Downloaden — Breng de code rechtstreeks over naar uw micro:bit met behulp van webUSB. Of, vergelijkbaar met Opslaan, download uw programma als een .hex-bestand en sleep het naar uw micro:bit. |
8 |
Blokbibliotheek — De gereedschapskist is waar u de blokken krijgt die uw programma vormen. Het is verdeeld in categorieën die kleurgecodeerd zijn. |
9 |
Simulator — U hebt geen hardware nodig! MakeCode heeft een real-time simulator! Terwijl u uw programma wijzigt, kunt u zien wat het zal doen op deze virtuele micro:bit! |
2. Micro:bit Project
In Deel 2: Micro:bit Project behandelen we alleen het gebruik van het Micro:bit moederbord. Het gebruik van de auto wordt behandeld in Deel 3: Robot Project.
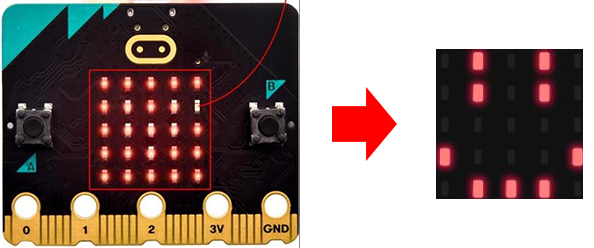
2.6.1 LED-matrix
Er zijn 25 LED’s aan de voorkant die u kunt gebruiken om afbeeldingen, cijfers en woorden weer te geven.
1 In deze stap downloaden we een code naar micro:bit om de LED’s op coördinaten (1,0) en coördinaten (3,4) te laten oplichten.
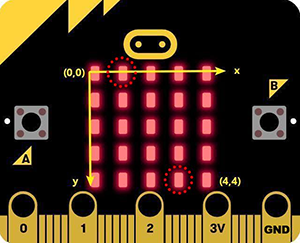
De linkerbovenhoek is het punt (0,0), de rechterbenedenhoek is het punt (4,4), de horizontale richting (van links naar rechts) is de x-asrichting, oplopend in volgorde [0-4], en de verticale richting (van boven naar beneden) is de y-asrichting, oplopend in volgorde [0-4].
Stappen:
Verbind uw Hervatten: De hervatknop zal nieuwe waarden weergeven nadat de pauzeknop is ingedrukt.
Downloaden: De downloadknop verzamelt de gegevens die uw code heeft geschreven en downloadt deze naar uw computer als een bestand met een naam zoals data-11-2018-23-00-0700.csv. De nummers in de bestandsnaam zijn de datum en tijd waarop het bestand is aangemaakt. Het bestand kan automatisch worden geopend in een editor of spreadsheet als een van deze programma’s is gekoppeld aan csv-bestanden.

2 Laten we nu een andere code naar de micro:bit sturen om de LED-matrix van de micro:bit de temperatuur te laten weergeven die door de temperatuursensor is gedetecteerd.
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
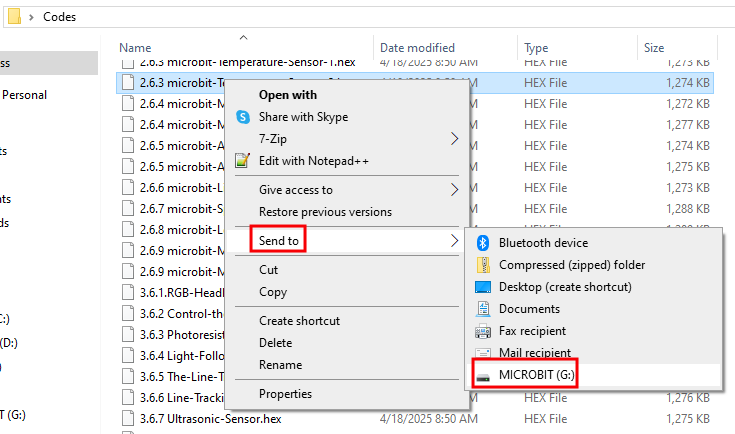
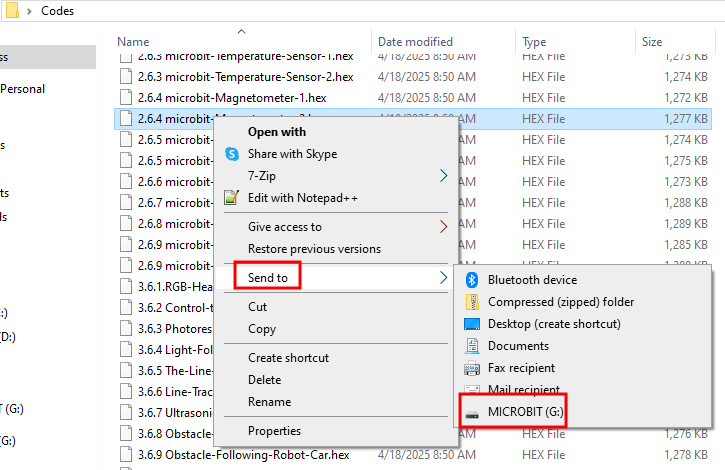
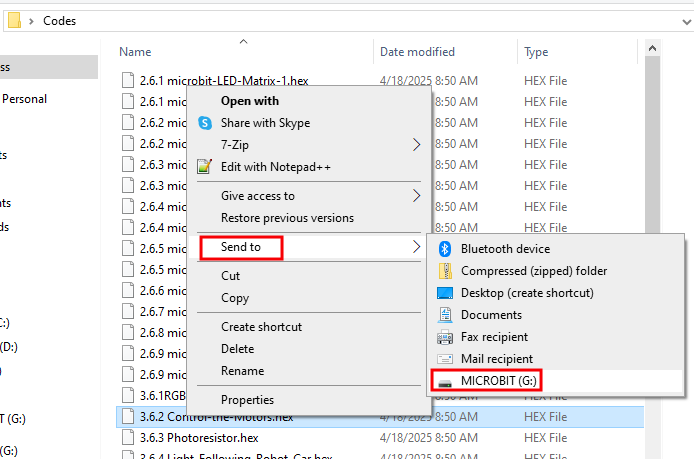
Zoek het gedownloade micro:bit-Temperature-Sensor-2.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
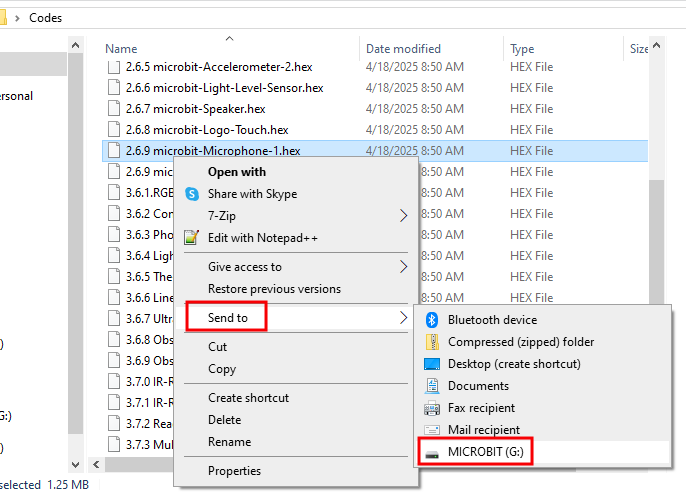
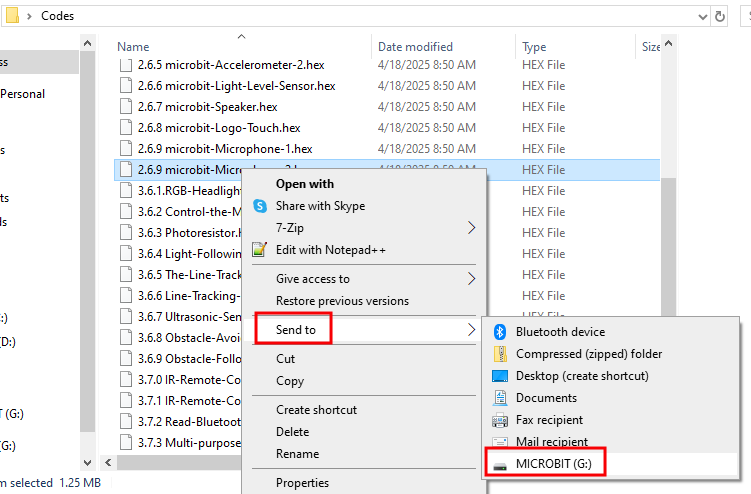
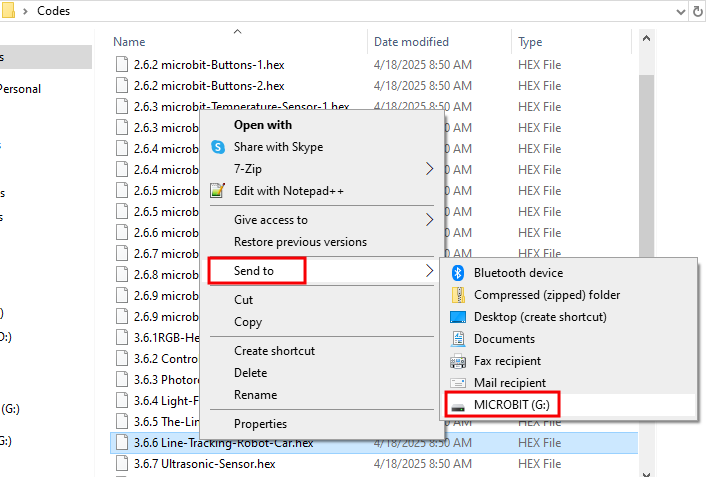
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
2.6.3 microbit-Temperatuur-Sensor-2 |
Resultaat: Wanneer uw micro:bit wordt ingeschakeld, wordt de temperatuurmeting in Celsius weergegeven en over de LED-array gescrolld, gevolgd door de temperatuurmeting in Fahrenheit.
2.6.4 Magnetometer
De ingebouwde magnetometerschip van de micro:bit is bedoeld voor gebruik als kompas om het magnetische noorden te detecteren. Net als de kompas-app op uw telefoon, vereist dit kalibratie.
1 We moeten eerst het kompas van de micro:bit kalibreren. Laat vervolgens de led-matrix de richtingwaarde weergeven die door het kompas is afgelezen. Noord, oost, zuid en west komen overeen met 0°, 90°, 180° en 270°.
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
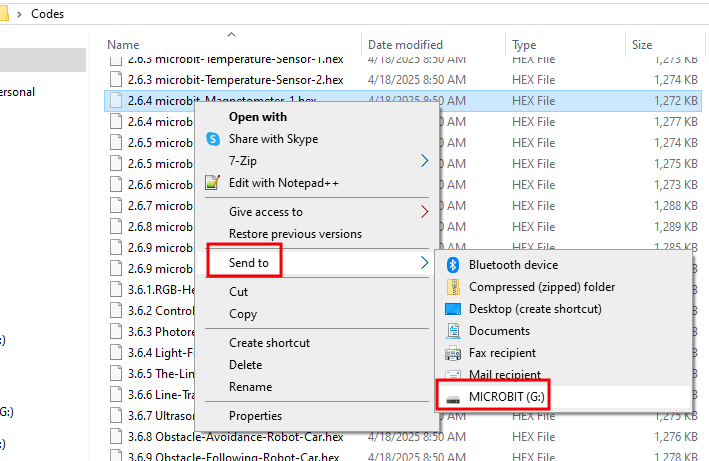
Zoek het gedownloade micro:bit-Magnetometer-1.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
2.6.4 microbit-Magnetometer-1 |
Nadat de code naar de micro:bit is gedownload, vraagt de LED-matrix van de micro:bit: “TILT TO FILL SCREEN”, en gaat dan naar de kalibratiemodus.
De kalibratiemethode is:
Wanneer u de micro:bit in een bepaalde richting kantelt, zal de LED-matrix meer LED’s in die richting oplichten. Blijf de micro:bit in alle richtingen kantelen totdat alle LED’s branden en er een smiley verschijnt die aangeeft dat de kalibratie is voltooid!
Testresultaat: Elke keer dat u op knop A drukt, wordt de positiewaarde die door het kompas is afgelezen, weergegeven op de LED-matrix. Verander de oriëntatie van de micro:bit en u zult merken dat de positiewaarde dienovereenkomstig verandert.
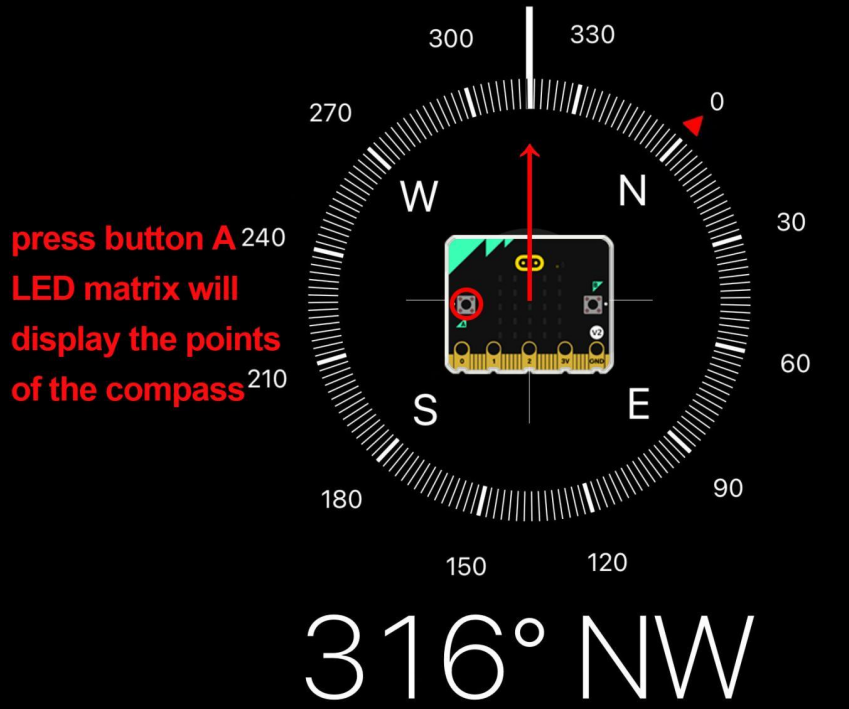
2 Hier zullen we een nieuwe code downloaden om de pijl op de LED-matrix van de micro:bit altijd naar het noorden te laten wijzen.
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
Zoek het gedownloade micro:bit-Magnetometer-2.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
2.6.4 microbit-Magnetometer-2 |
Nadat de code naar de micro:bit is gedownload, vraagt de LED-matrix van de micro:bit: “TILT TO FILL SCREEN”, en gaat dan naar de kalibratiemodus.
De kalibratiemethode is:
Wanneer u de micro:bit in een bepaalde richting kantelt, zal de LED-matrix meer LED’s in die richting oplichten.
Blijf de micro:bit in alle richtingen kantelen totdat alle LED’s branden en er een smiley verschijnt die aangeeft dat de kalibratie is voltooid!
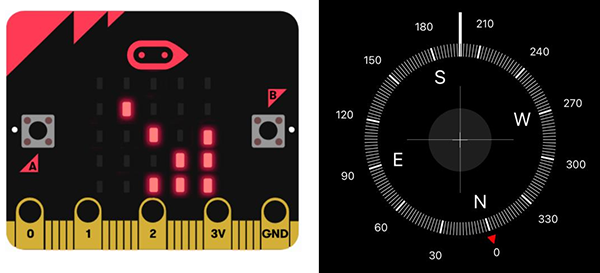
Testresultaat: Plaats de LED-matrix van de micro:bit horizontaal naar boven gericht en verander de oriëntatie horizontaal. U zult merken dat, ongeacht hoe u de oriëntatie verandert, de pijl die door de LED-matrix wordt weergegeven in dezelfde richting wijst. Als u een kompas-app op uw telefoon hebt, schakel de kompas-app dan in, houd uw micro:bit horizontaal in dezelfde richting als uw telefoon en u zult zien dat de pijl van de micro:bit naar het noorden wijst (0 graden).
2.6.5 Versnellingsmeter
Een versnellingsmeter is een bewegingssensor die beweging meet. De versnellingsmeter in uw BBC micro:bit detecteert wanneer u deze van links naar rechts, van voor naar achter en van boven naar beneden kantelt.
Als u zich de micro:bit plat op een bureau voorstelt, is de x-dimensie van links naar rechts; de y-dimensie van voor naar achter en de z-dimensie in en uit het bureau. We kunnen een versnellingsmeter gebruiken om de oriëntatie van de micro:bit te detecteren, aangezien de zwaartekracht altijd in dezelfde neerwaartse richting zal werken.
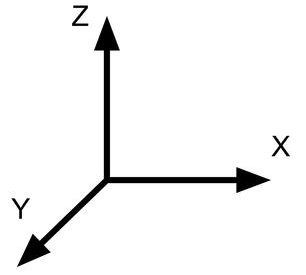
X: versnelling in de linker- en rechterrichting.
Y: versnelling in de voorwaartse en achterwaartse richting.
Z: versnelling in de op- en neerwaartse richting.
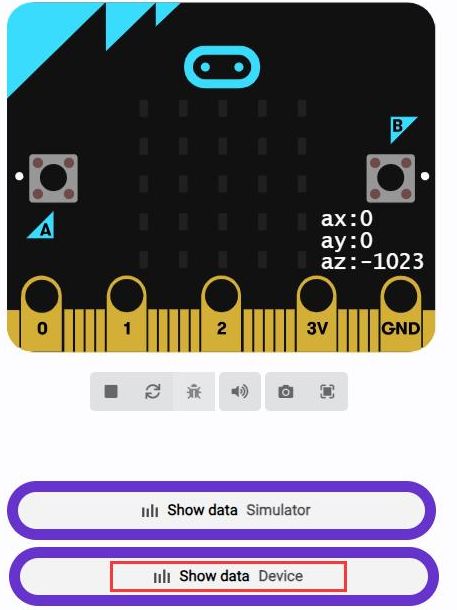
Sterkte: de resulterende versnellingssterkte van alle drie de dimensies (richtingen).
Een getal dat de hoeveelheid versnelling aangeeft
Wanneer de micro:bit plat op een oppervlak ligt met het scherm naar boven gericht,
-x is 0,
-y is 0,
-z is -1023,
-en sterkte is 1023.
1 In deze stap zullen we het Data View Window gebruiken om de waarden van de x-, y- en z-assen die door de versnellingsmeter zijn gedetecteerd, weer te geven.
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
Zoek het gedownloade micro:bit-Accelerometer-1. Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
2.6.9 microbit-Microphone-1 |
Resultaat: Nadat de code is gedownload, wordt een klein hartje weergegeven in het midden van de LED-matrix van de micro:bit. U kunt proberen in uw handen te klappen in de buurt van de micro:bit. Elke keer dat u klapt, verandert het kleine hartje op de LED-matrix in een groot hart.
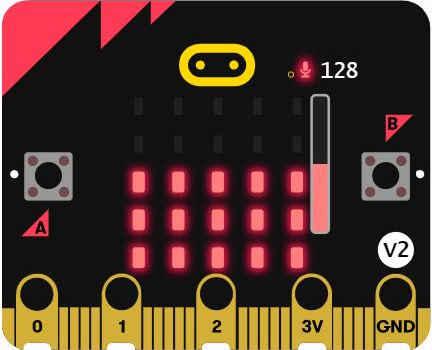
2 Vervolgens downloaden we de nieuwe code naar de Micro Bit en geven we het volume van het geluid weer op de LED-matrix.
Stappen:
Verbind uw micro:bit met uw computer via een USB-kabel.
Zoek het gedownloade micro:bit-Microphone-2.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
2.6.9 microbit-Microphone-2 |
Resultaat: Nadat de code is gedownload, zult u merken dat hoe luider het geluid rond de micro:bit is, hoe meer LED’s van onder naar boven oplichten.
3. Robotproject
3.1 Extensie toevoegen voor het robotproject
We hebben een speciale extensie gemaakt om codeertaken voor de mini-robotauto te vereenvoudigen.
Extensies zijn functionele codemodules die van buiten de MakeCode-editor worden geïnstalleerd en nieuwe blokken toevoegen aan de Toolbox. Als u eerder Arduino hebt gebruikt, kent u waarschijnlijk iets dat een bibliotheek wordt genoemd; dit is een verzameling code die de functionaliteit van de kernprogrammeertaal uitbreidt. MakeCode-extensies werken op dezelfde manier.
Sleep de hex-bestanden die we hebben geleverd naar de Makecode-editor of gebruik de knop “Importeren” om de hex-bestanden die we hebben geleverd te openen. U ziet twee extra extensies in de Toolbox-lijst, die al in onze code zijn opgenomen.
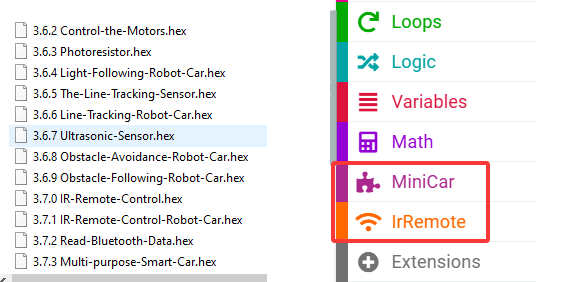
Dat wil zeggen, als u het hex-bestand gebruikt dat wij hebben geleverd, hoeft u deze extensies niet toe te voegen aan de Makecode-editor.
Opmerking:
1. Als u blokken wilt slepen en neerzetten om een nieuw project te maken om deze robotauto te besturen, moet u de extensie die wij leveren toevoegen om nieuwe blokken te gebruiken om de code te voltooien.
2. Voor elk nieuw MakeCode-project dat u maakt, moet u de extensies opnieuw laden.
Hoe een extensie toe te voegen
Kopieer en plak de volgende link in het zoekvak en druk op “Enter” om te zoeken.
https://github.com/keyestudio2019/MiniCar
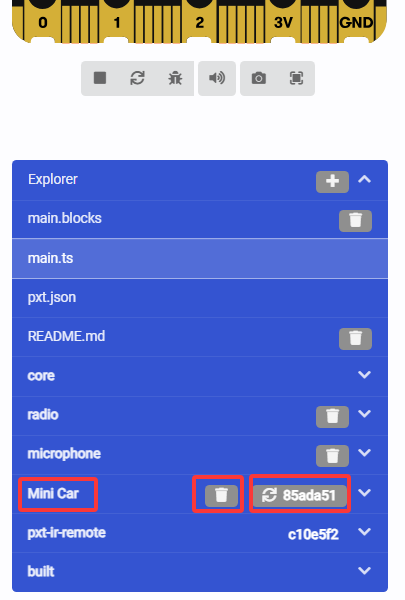
Hoe een extensie bij te werken of te verwijderen
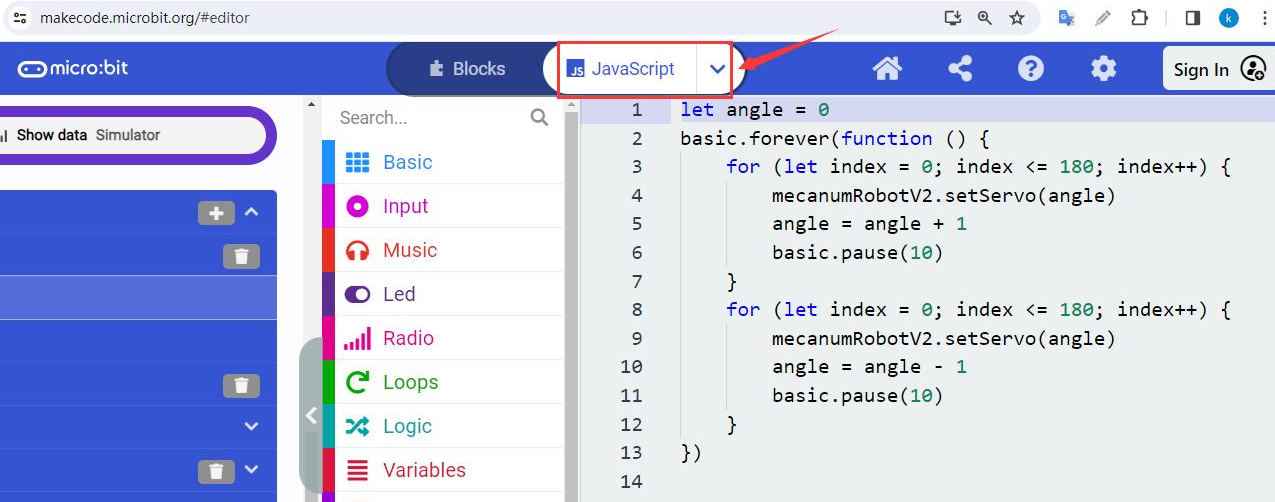
Klik op de knop “JavaScript” om over te schakelen naar tekstcode.
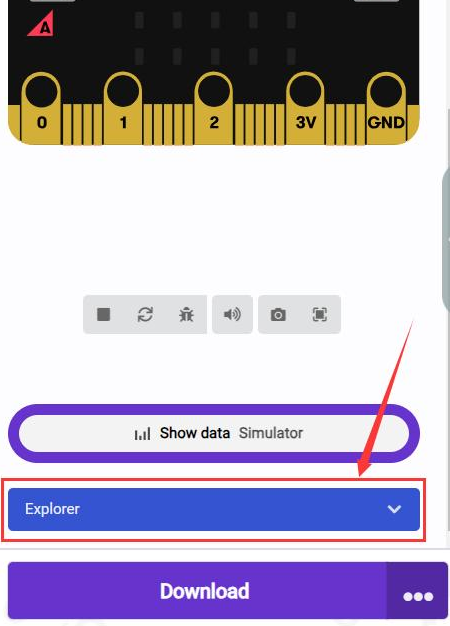
Zoek de Explorer-knop onder de simulator
Zoek Mini Car in de uitgebreide lijst.
Klik op het prullenbakpictogram om de extensie te verwijderen.
Klik op het vernieuwingspictogram om de extensie bij te werken.
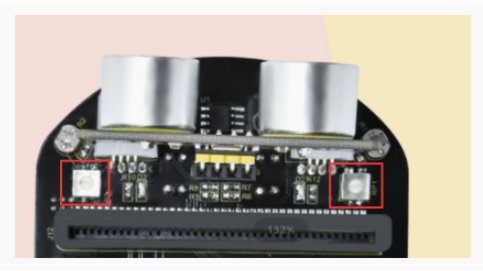
3.6.1 RGB-koplampen

Laten we de twee RGB-koplampen van de robotauto aansteken en deze
elke seconde laten knipperen in de volgorde rood, groen, blauw, cyaan, ossenbloedrood,
geel en wit.
Stappen:
Verbind de micro:bit op de robotauto met uw computer via een USB-kabel.
Zoek het gedownloade RGB-Headlights.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het naar de
micro:bit vanuit de editor te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
3.6.1RGB-Headlights |
Resultaat: Na het downloaden van de code zullen de RGB-koplampen van de robotauto elke seconde wisselen in de volgorde rood, groen, blauw, cyaan, ossenbloedrood, geel en wit. Als u de USB-voeding van de microbit loskoppelt, kunt u de schuifschakelaar van de robotauto aanzetten en deze van stroom voorzien via de batterijen.
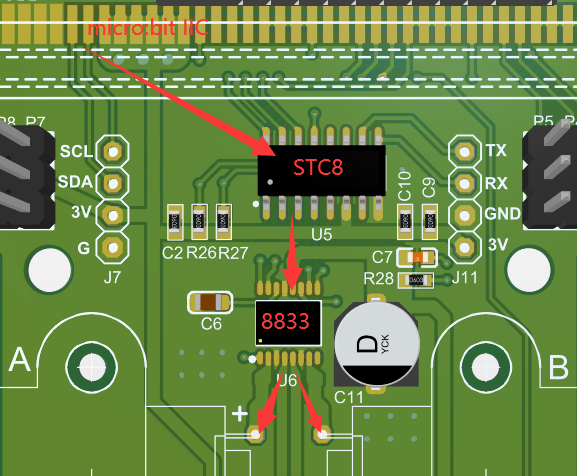
Schematisch diagram
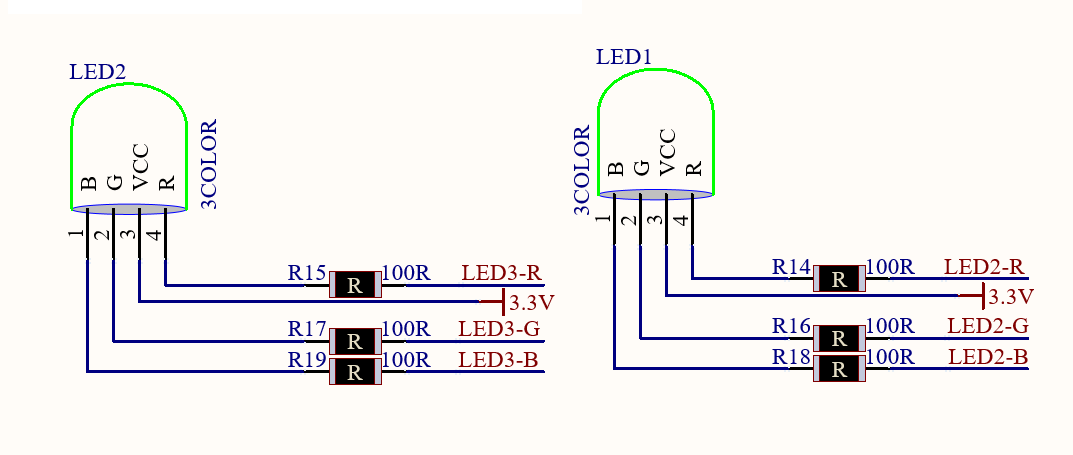
Werkingsprincipe: Micro:bit, als host, stuurt instructies naar de slave STC8G1K08 via de IIC, waarna de slave PWM uitvoert om RGB LED-lampen te regelen. Dit bespaart aanzienlijk de IO-poorten van het microbit-bord, want de IIC maakt het mogelijk om twee motoren en twee RGB LED-lampen te regelen.
3.6.2 De motoren bedienen
De robotauto is uitgerust met twee DC-reductiemotoren, die zijn ontwikkeld op basis van gewone DC-motoren. Hij beschikt over een bijpassende tandwielreductiekast, die een lagere snelheid maar een groter koppel biedt. Bovendien kunnen verschillende reductieverhoudingen van de kast verschillende snelheden en koppels leveren.
De reductiemotor is de integratie van tandwielmotor en motor, die veel wordt toegepast in de staal- en machine-industrie.
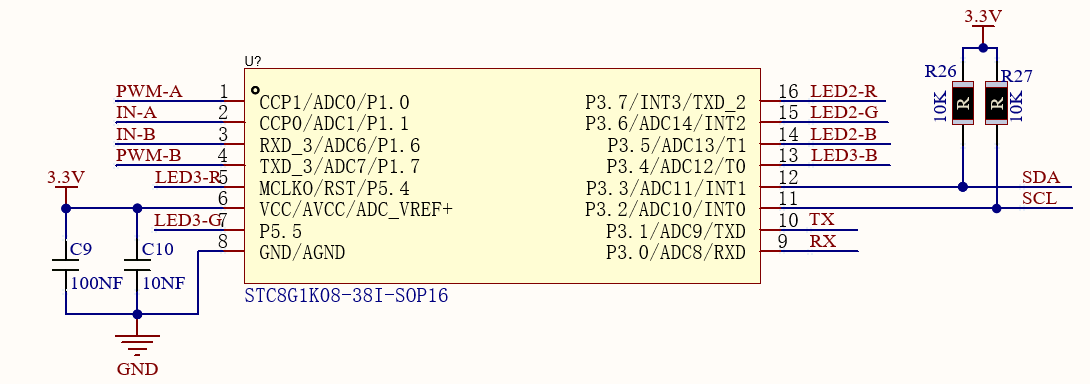
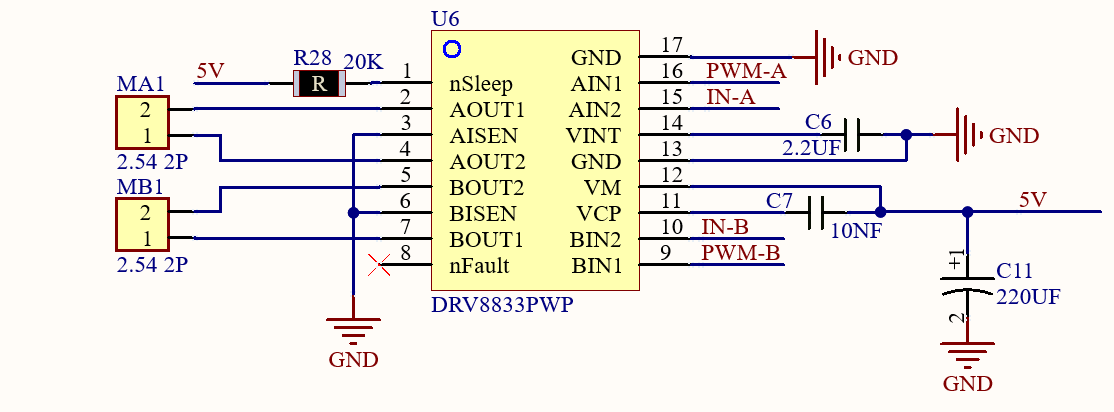
Bovendien beschikt de auto over een STC8G1K08- en een HR8833MTE-chip. Om de IO-poorten te besparen, sturen we instructies naar de STC8G1K08-chip via de IIC van de micro:bit, waarna de STC8G1K08-chip de HR8833MTE-chip bestuurt volgens de overeenkomstige instructies om de draairichting en snelheid van de twee DC-reductiemotoren te regelen (het besturingsproces is als volgt).
Schakelschema
Laten we een nieuwe code downloaden om de robotauto 1 seconde vooruit te laten gaan, 1 seconde achteruit, 1 seconde naar links te laten draaien, 1 seconde naar rechts te laten draaien en 1 seconde te laten stoppen.
Stappen:
Verbind uw micro:bit met uw computer Zet de POWER-schuifschakelaar uit op de autobasis om te voorkomen dat de robot beweegt en van de tafel valt nadat de code succesvol is gedownload.
Zoek het gedownloade Line-Tracking-Robot-Car.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar → micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
3.6.6 Line-Tracking-Robot-Car |
Resultaat:
Nadat de code is gedownload, plaatst u de robot op het papier en lijnt u de lijnvolgsensor uit met de zwarte lijn.
De potentiometer afstellen:
Als de auto de lijn niet goed volgt, stelt u de potentiometer als volgt af.
Upload de cursuscode.
Plaats de auto met de voorkant naar u toe. Draai de linkerpotentiometer volledig tegen de klok in en de rechterpotentiometer volledig met de klok mee.
Plaats de auto op het witte gedeelte van de baan, zoals weergegeven in de video. Stel elke potentiometer langzaam af totdat het indicatielampje ernaast net oplicht. Til de auto met de hand op; alle indicatielampjes moeten uitgaan.
Zet de aan/uit-schakelaar aan op de autobasis, de robotauto zal de zwarte lijn volgen.

Opmerking:
Voer dit experiment niet uit in fel zonlicht. Zonlicht bevat een grote hoeveelheid onzichtbaar licht, zoals infraroodstralen en ultraviolette stralen, die de werking van de lijnvolgsensor zullen beïnvloeden.
Wat als de robot niet werkt of de lijn niet volgt?
Controleer of de batterij voldoende stroom heeft.
U kunt de sleufschroevendraaier gebruiken om de twee potentiometers aan de bovenkant te draaien om de gevoeligheid van de sensor aan te passen. Wanneer een vinger dicht bij de sensor is, licht de ingebouwde LED op, wat aangeeft dat de gevoeligheid van de sensor goed is.
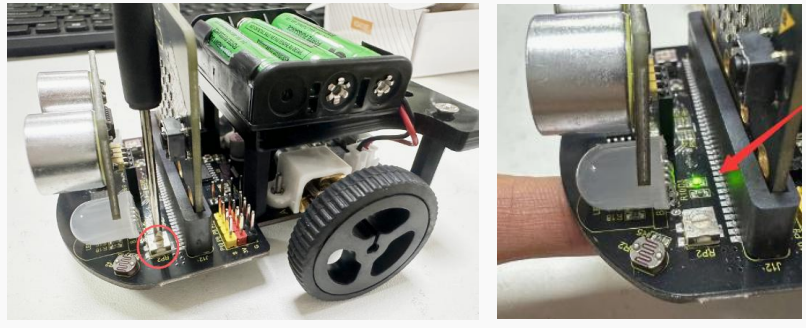
3.6.7 Ultrasone Sensor

Laten we eens kijken naar de afbeelding van de ultrasone sensormodule. Er zijn twee dingen die op ogen lijken, de ene is de signaalzender (TRIG) en de andere is de signaalontvanger (ECHO).
Werkingsprincipe:
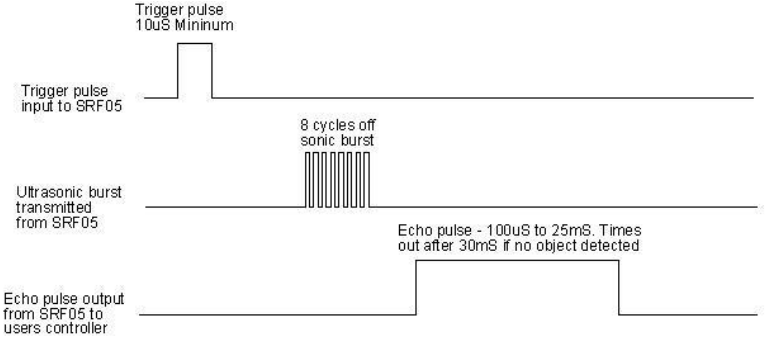
(1) We trekken eerst TRIG (T) laag, en geven dan minstens 10us hoog niveau signaal om te triggeren;
(2) Na het triggeren zal de module automatisch 8 40KHZ blokgolven uitzenden en automatisch detecteren of er een signaal terugkeert;
(3) Als een signaal terugkeert, wordt een hoog niveau via ECHO (E) uitgevoerd. De duur van het hoge niveau is de tijd van verzending tot ontvangst van de ultrasone golf.
Dan is de testafstand = de duur van het hoge niveau *340m/s * 0.5
Specificaties:
Werkspanning: 3-5.5V (DC)
Werkstroom: 50mA-100mA, normaal is 65mA
Maximaal vermogen: 0.5W
Maximale detectieafstand: ongeveer 3m
Blinde vlek: minder dan 4cm
Detectiehoek: niet meer dan 15 graden
Interface: 4-pins interface met een afstand van 2.54mm
Positioneringsgat: 3mm diameter
Werktemperatuur: -10℃ - +60℃
Afmeting: 49mmX22mmX19mm
Laten we nu de ultrasone sensor gebruiken om de afstand van een object
voor de robot te meten.
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
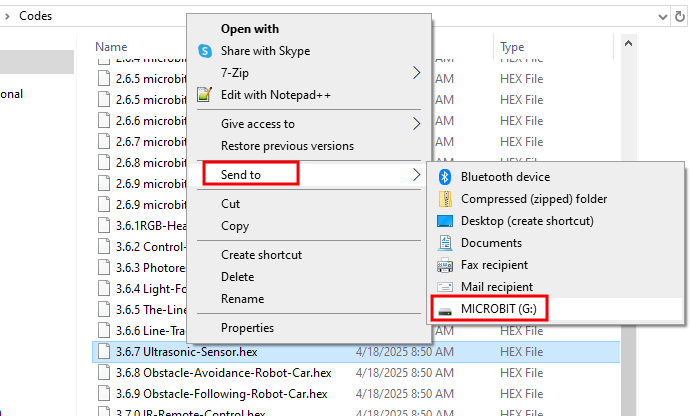
Zet de POWER-schuifschakelaar aan op de autobasis. Zoek het gedownloade Ultrasonic-Sensor.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
3.6.7 Ultrasonic-Sensor |
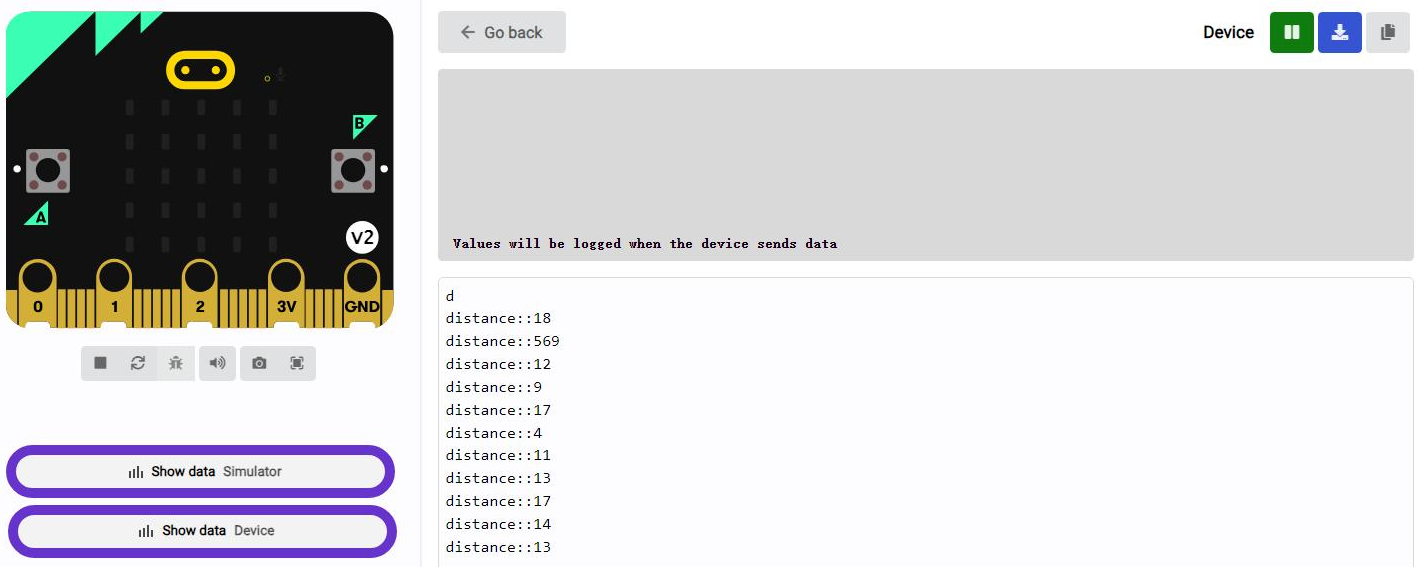
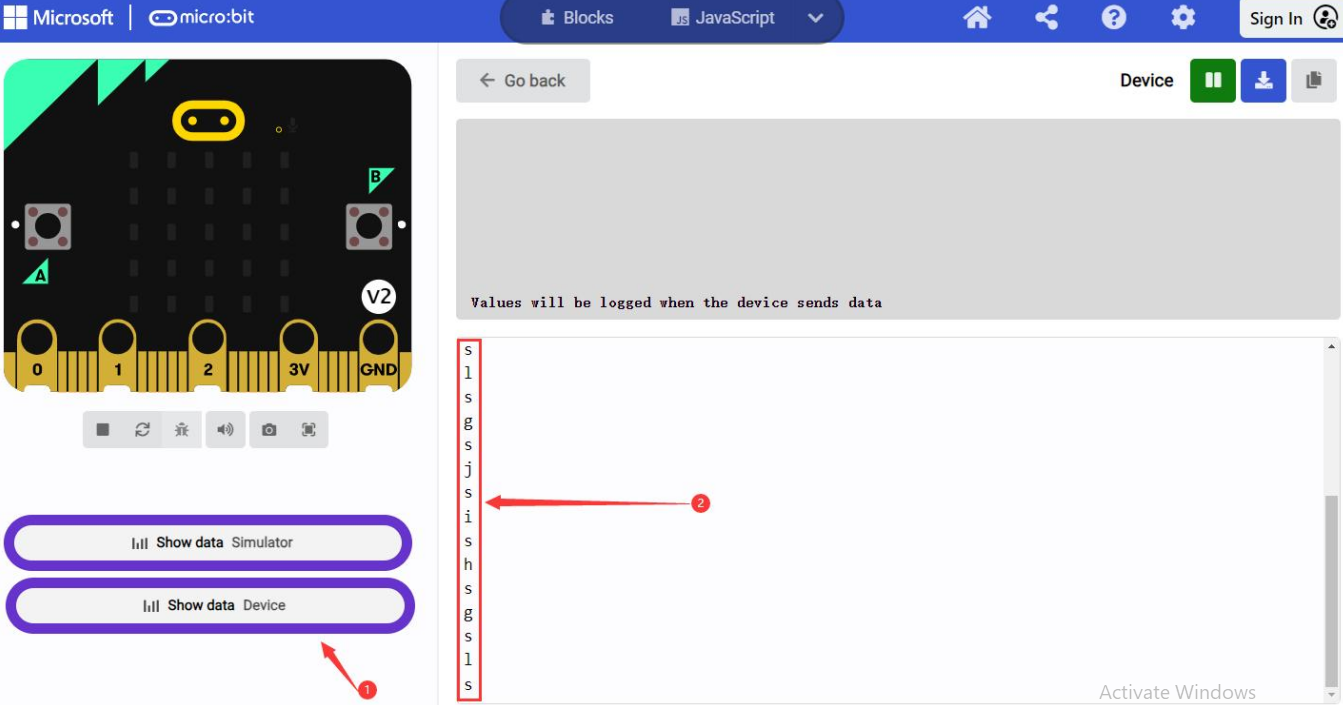
Resultaat: Klik op de knop “Show data Device” onder de simulator. De afstand van het object vooraan, gemeten door de ultrasone sensor, zal worden weergegeven.
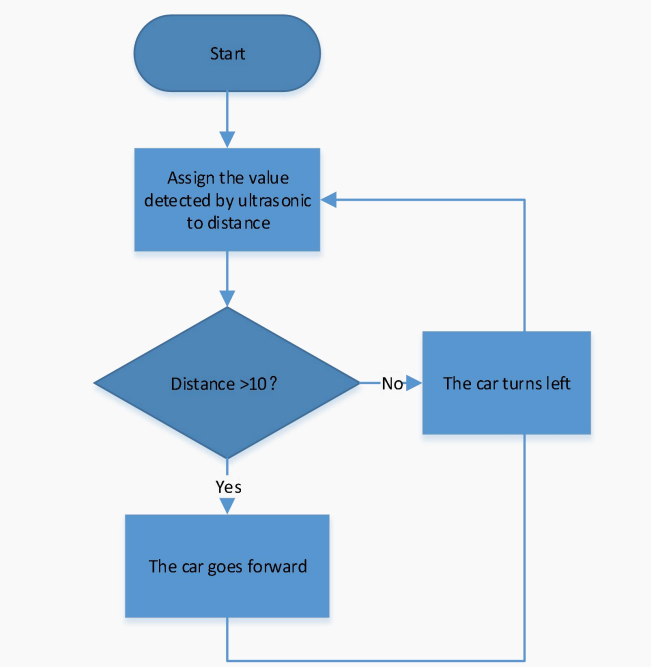
3.6.8 Obstakelvermijdende Robotauto
Een obstakelvermijdende robot is een intelligente robot die automatisch obstakels op zijn pad kan waarnemen en omzeilen.
Laten we een obstakelvermijdende robot maken!
Werkingsprincipe:
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
Zet de POWER-schuifschakelaar uit om te voorkomen dat de robot beweegt en van de tafel valt nadat de code succesvol is gedownload.
Zoek het gedownloade Obstacle-Avoidance-Robot-Car.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
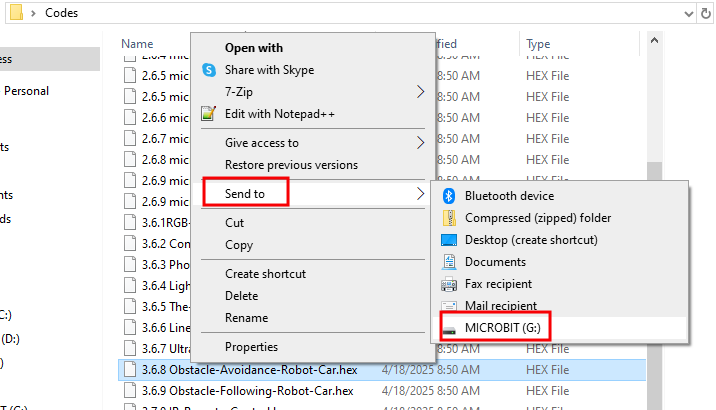
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar → micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
3.6.8 Obstacle-Avoidance-Robot-Car |
Resultaat: Plaats de robot op de grond en zet de aan/uit-schakelaar aan op de autobasis, de robotauto zal vooruit bewegen en obstakels vermijden.
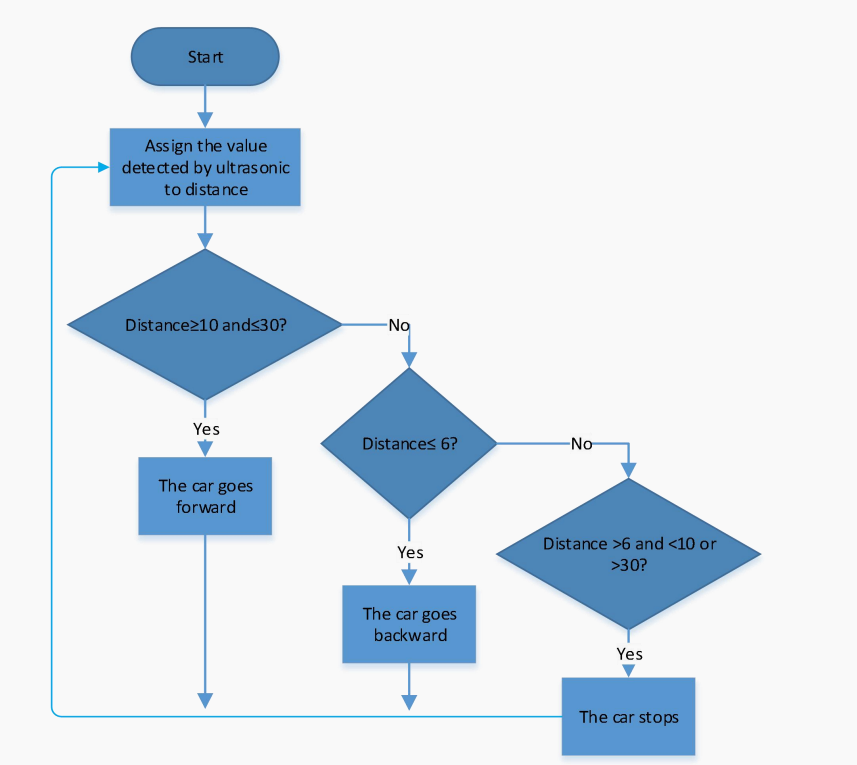
3.6.9 Obstakelvolgende Robotauto
In tegenstelling tot het vorige hoofdstuk, zullen we in deze stap een ultrasone volgende auto maken. Het oppervlak van het obstakel vooraan moet vlak en groot genoeg zijn om ultrasone signalen terug te sturen naar de ultrasone module.
Werkingsprincipe:
Stappen:
Verbind uw micro:bit met uw computer met een USB-kabel.
Zet de POWER-schuifschakelaar uit op de autobasis om te voorkomen dat de robot beweegt en van de tafel valt nadat de code succesvol is gedownload.
Zoek het gedownloade Obstacle-Following-Robot-Car.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar → micro:bit” kiezen.
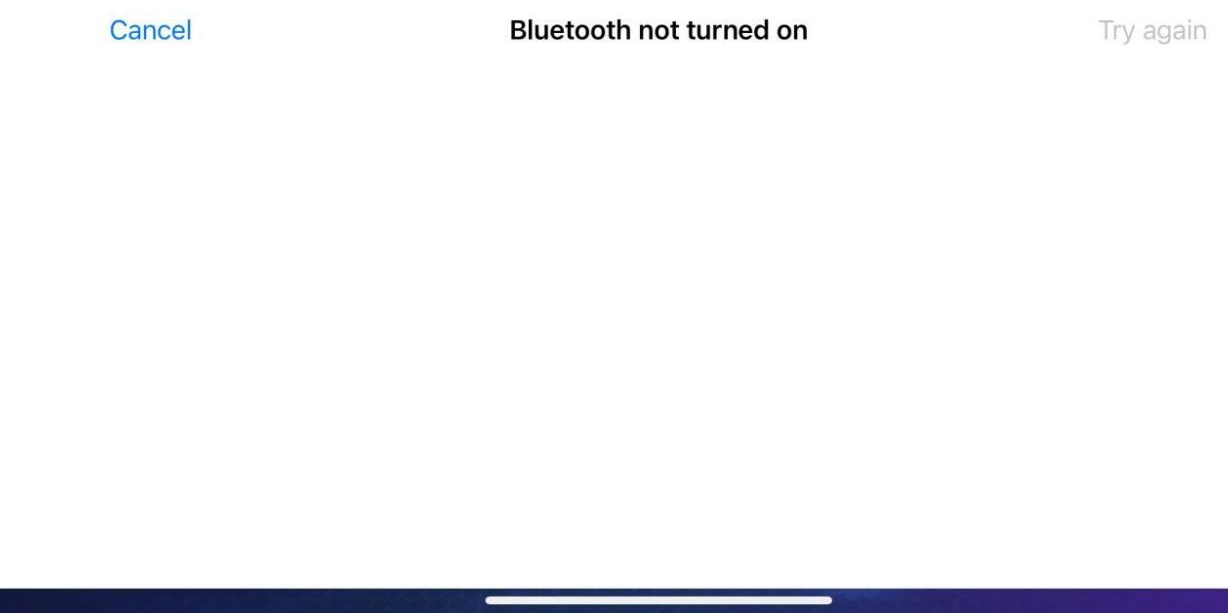
Als na het klikken op de knop VERBINDEN de pop-uppagina leeg is en aangeeft dat Bluetooth niet is ingeschakeld, sluit dan de APP af, start deze opnieuw op en probeer het opnieuw.
U moet er ook voor zorgen dat u de volgende stappen hebt voltooid.
1). Code is gedownload naar de micro:bit
2). De batterij is voldoende opgeladen en de aan/uit-schakelaar op de autobasis is ingeschakeld.
4). Schakel Bluetooth en locatieservices in op de telefoon.
5). Sta de mini car APP toe om toegang te krijgen tot Bluetooth.
Voor Android-systeemapparaten
Zoek keyes mini car in Google Play
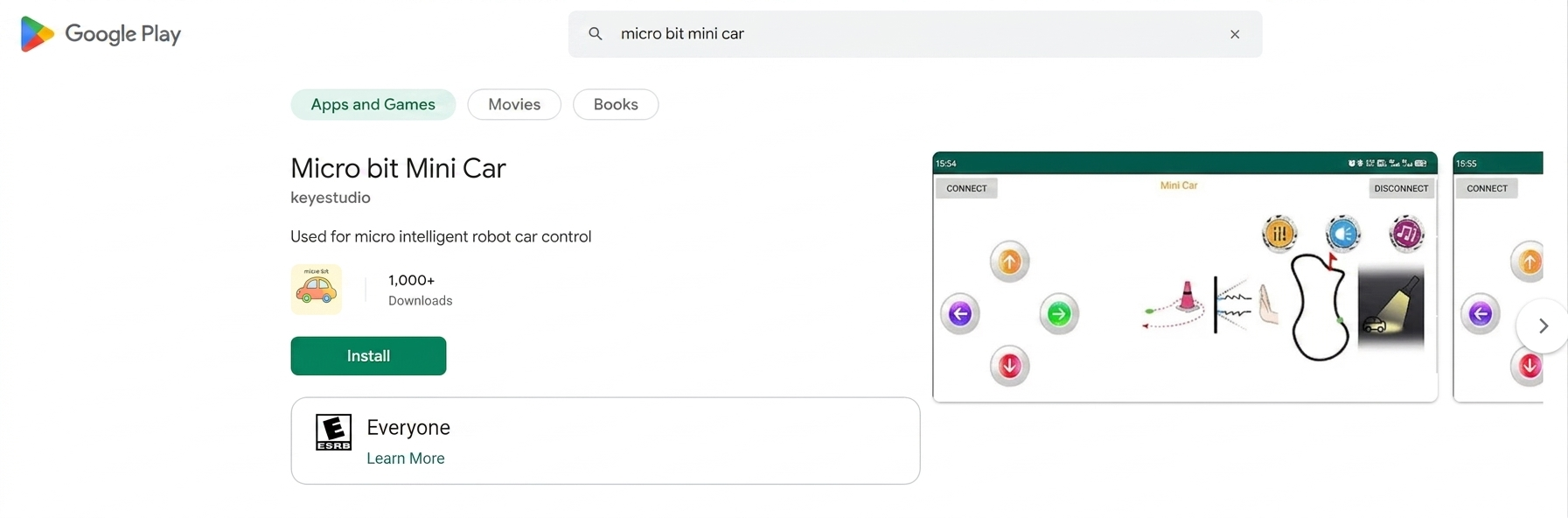
Klik op INSTALLEREN
Er verschijnt een beveiligingswaarschuwing. Wij garanderen dat de APP veilig is, gebruik deze met vertrouwen.
-Selecteer Ik begrijp dat deze app niet is getest en een risico kan vormen

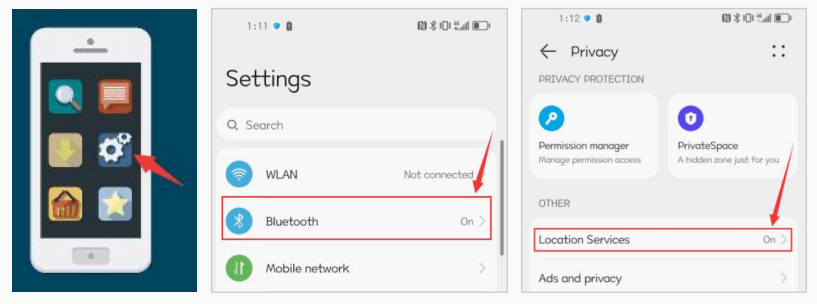
Klik op Instellingen van de mobiele telefoon en schakel Bluetooth in.
Klik op Privacy en schakel de locatieservices in.
Klik op Instellingen > Apps & services > Toestemmingsbeheer
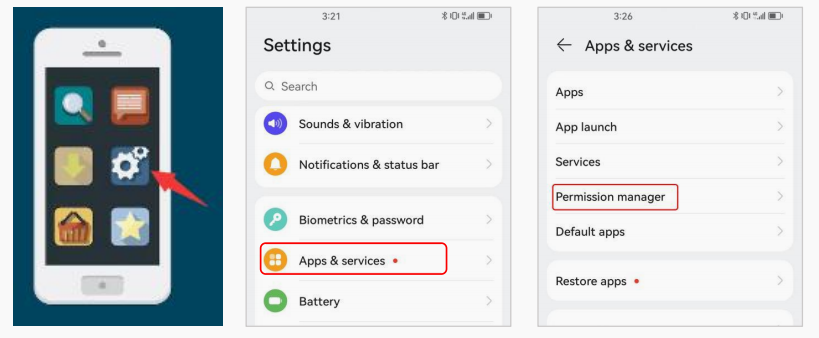
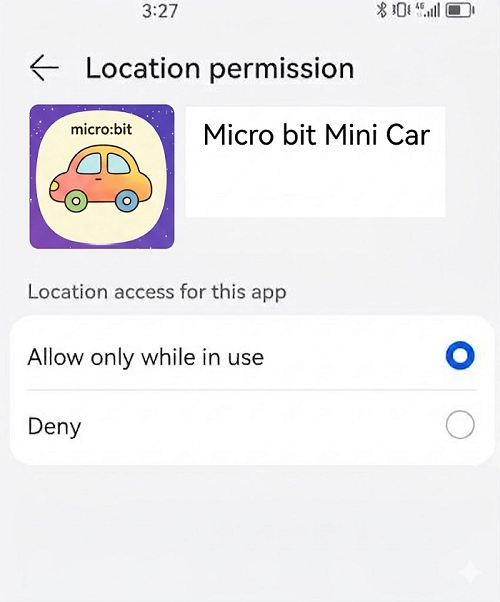
Zoek de keyes mini car Bluetooth-app, klik op de toestemmingsopties van de app en schakel Locatie- en nabijgelegen apparaattoestemmingen in. (Opmerking: Sommige mobiele telefoons hebben geen functie voor nabijgelegen apparaattoestemmingen.)
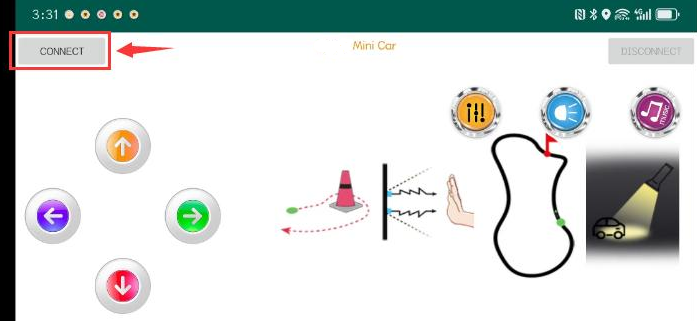
Klik om de keyes mini car APP te openen.

Klik op de knop VERBINDEN in de linkerbovenhoek van de APP-startpagina.
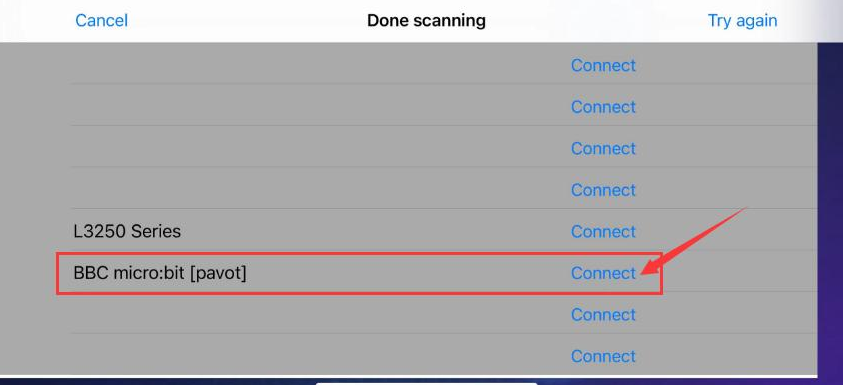
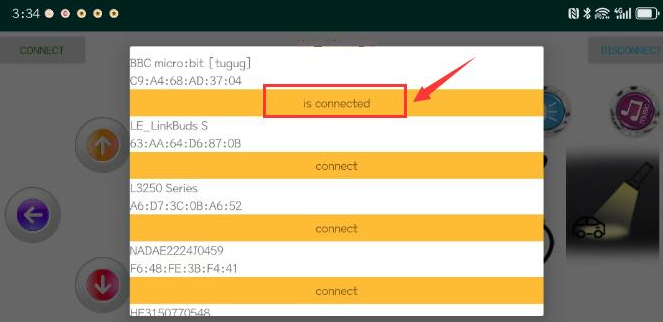
Na het klikken op de knop VERBINDEN verschijnt er een Bluetooth-lijst, scroll door de lijst en zoek BBC Micro:bit, klik op Verbinden. Nadat “is verbonden” wordt weergegeven, klikt u op de lege ruimte buiten het pop-upvenster om terug te keren naar de hoofdinterface van de APP.
Klik op de “Show Data Device” onder de simulator in Makecode Editor.
Klik op de knop in de Bluetooth APP, het Data View Window zal de corresponderende letterwaarde weergeven, en “S” zal worden weergegeven bij het loslaten van een knop.
3.7.3 Multifunctionele slimme auto
In het vorige hoofdstuk hebben we geleerd hoe we de Bluetooth APP moeten installeren en gebruiken. In deze stap zullen we de Bluetooth APP gebruiken om de mini-robotauto te besturen.
Stappen:
Verbind je micro:bit met je computer met een USB-kabel.
Schakel de POWER-schuifschakelaar op de autobasis in.
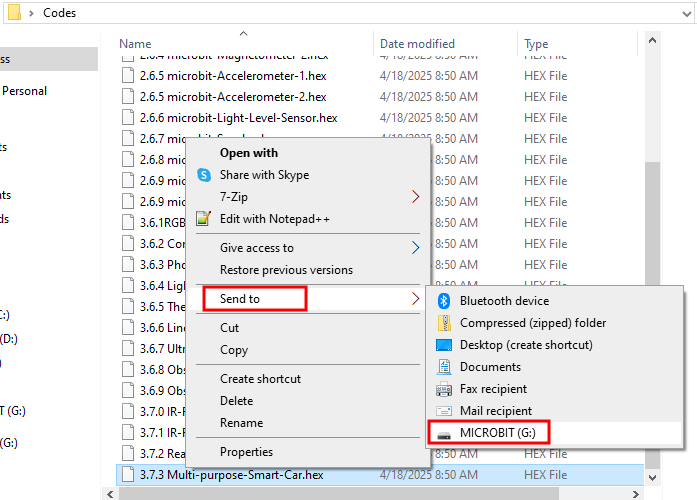
Zoek het gedownloade Multi-purpose-Smart-Car.hex-bestand, sleep het naar Makecode om het te bekijken en te analyseren, en gebruik WebUSB om het vanuit de editor naar de micro:bit te flashen.
Of u kunt er met de rechtermuisknop op klikken en “Verzenden naar→micro:bit” kiezen.
Bestandstype |
Pad |
Bestandsnaam |
|---|---|---|
hex-bestand |
Codes |
3.7.3 Multi-purpose-Smart-Car |
Resultaat:
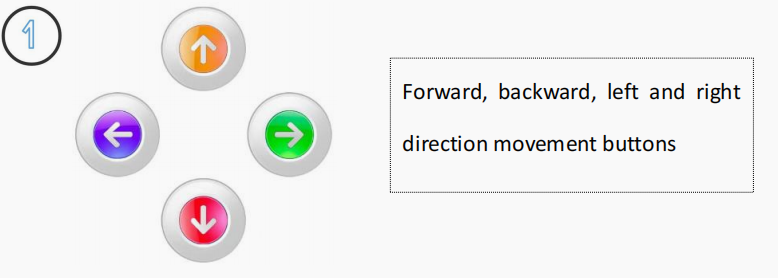
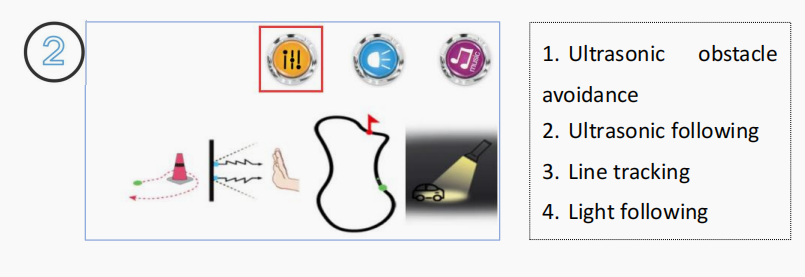
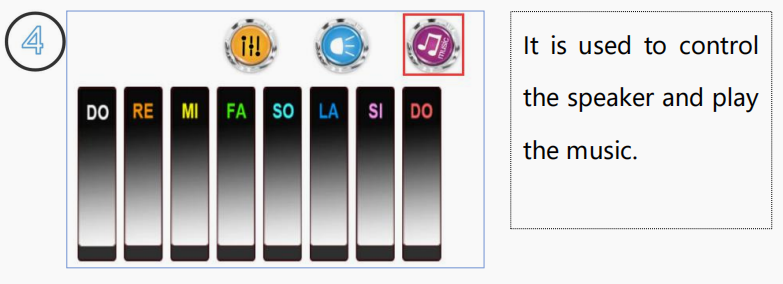
Plaats de robot op de grond en schakel de aan/uit-schakelaar op de autobasis in, verbind de Bluetooth APP met de micro:bit, dan kunt u de Bluetooth APP gebruiken om de robot te besturen.
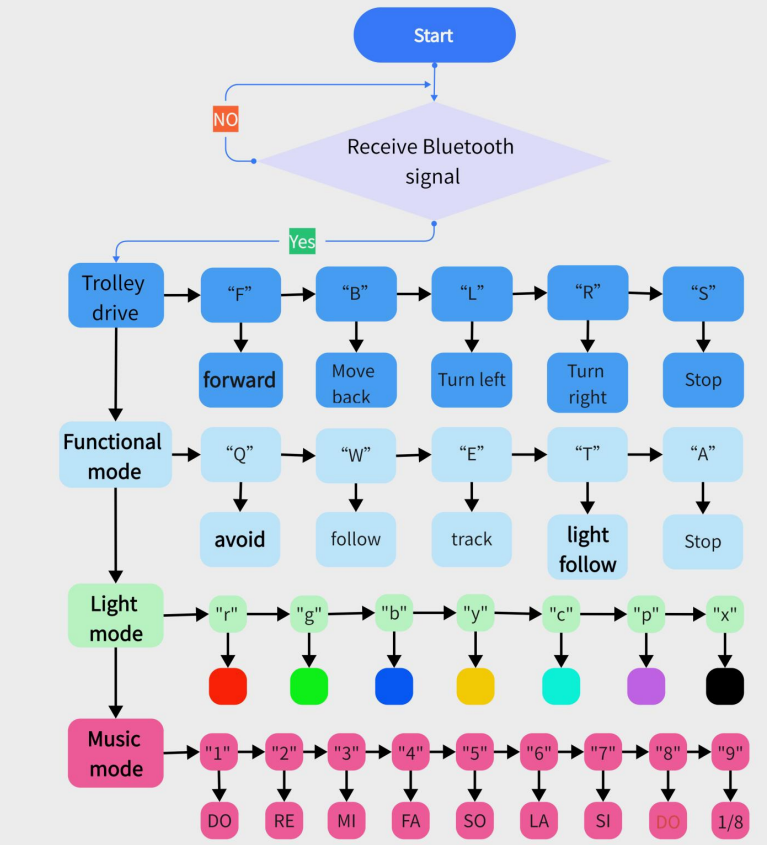
Hieronder staan de functies die overeenkomen met de knoppen op de Bluetooth APP-interface.