Catapult Robot Tutorial
Description:
A catapult is a ballistic device used to launch a projectile a great distance without the aid of gunpowder or other propellants –particularly various types of ancient and medieval siege engines… We will make a catapult with LEGO building blocks. Equipped withservos and gears, the car has LEGO tower used to carry projectiles.
As the servo rotates to a proper angle then push the long arm backward a projectile will be launched.
Install APP
⚠️Special note: If you have downloaded and installed the APP, this step is skipped; If not, please refer to the installation instructions of link: Project 18:Read WiFi APP Button String .
How to build up a catapult robot
Step 1
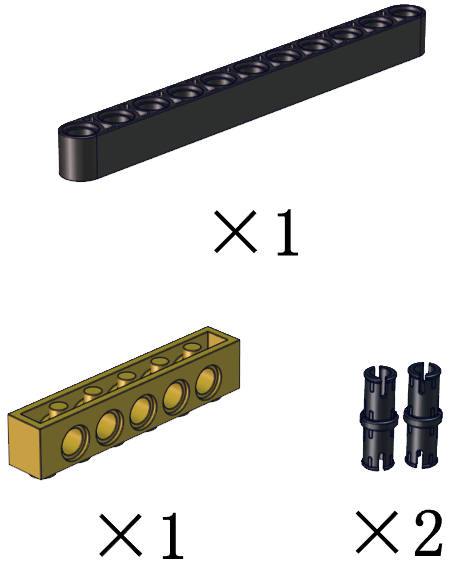
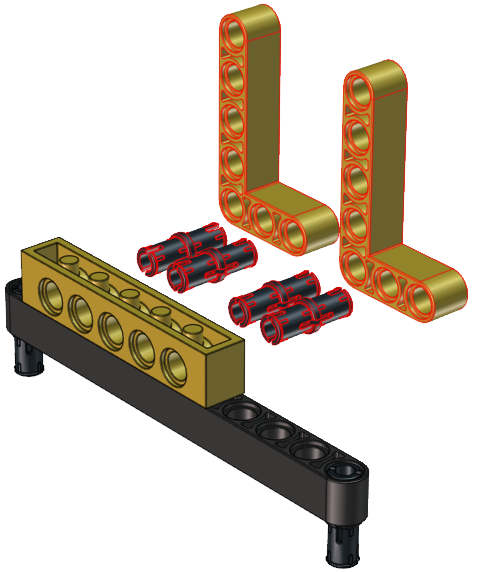
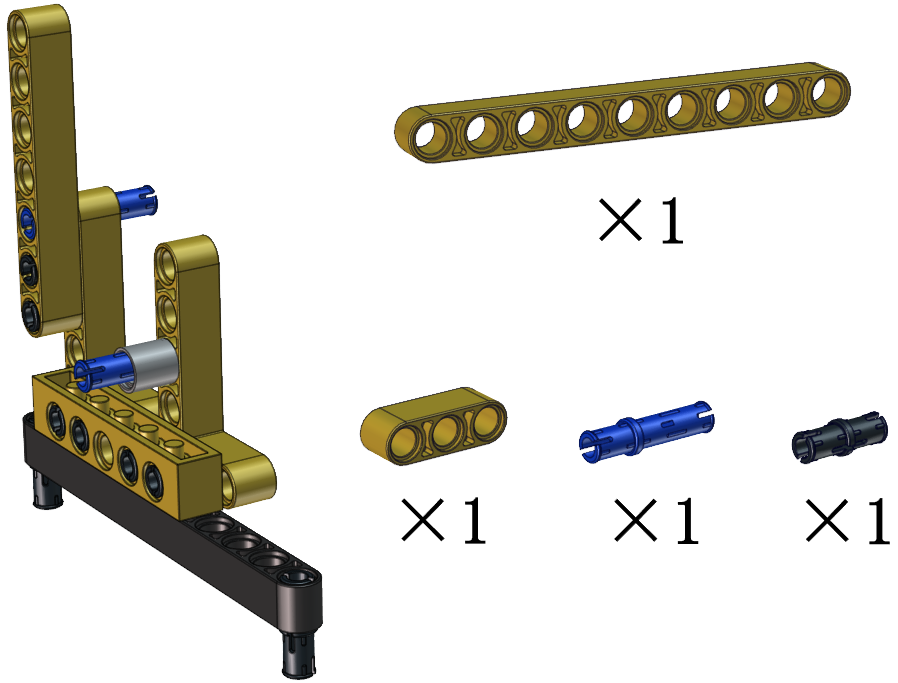
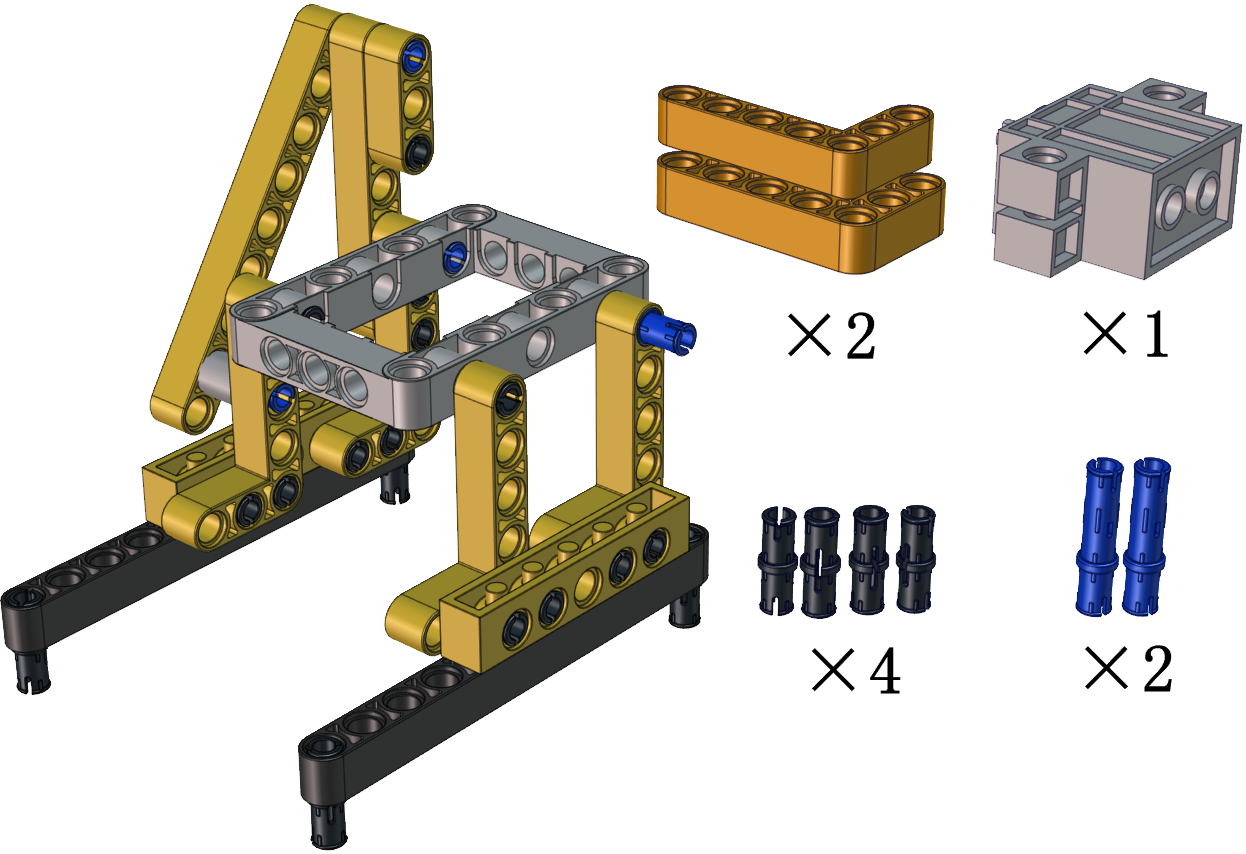
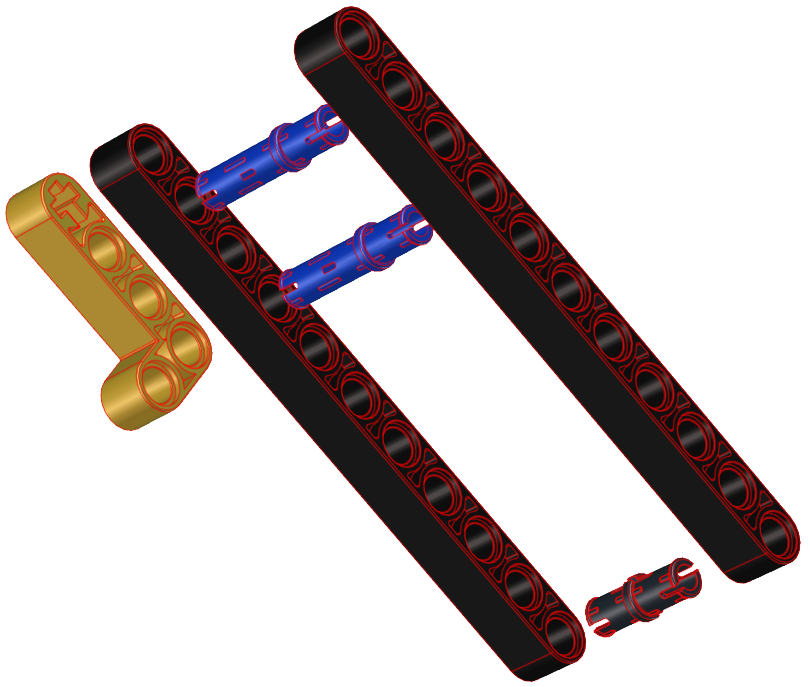
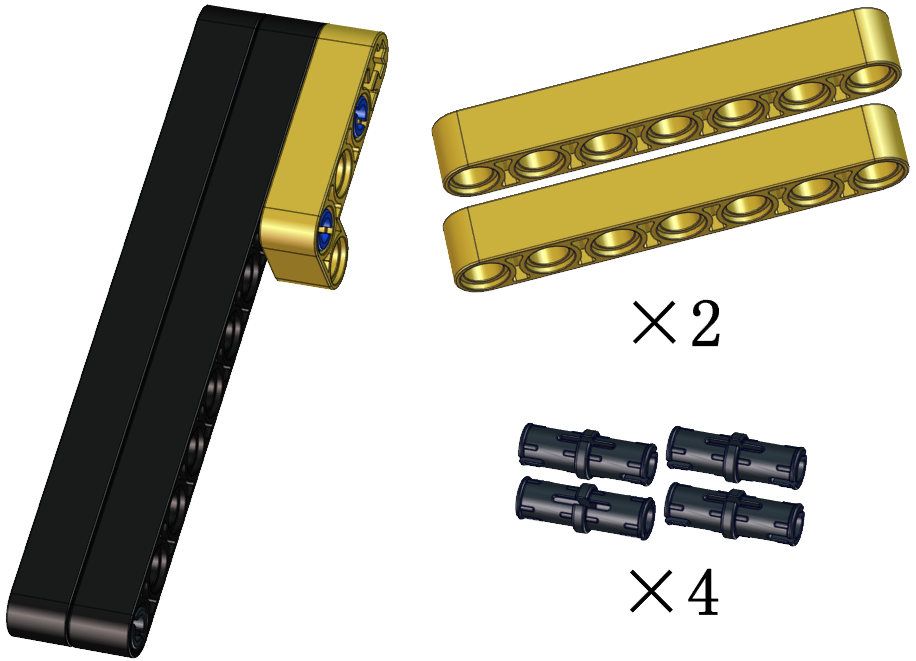
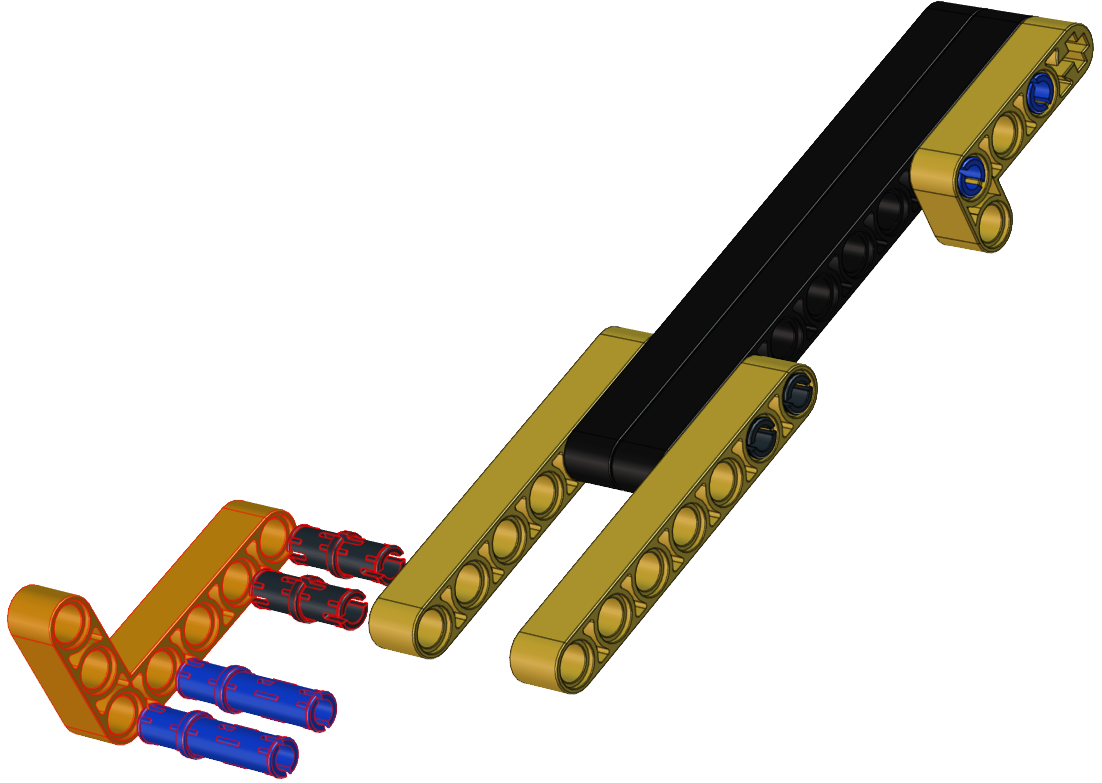
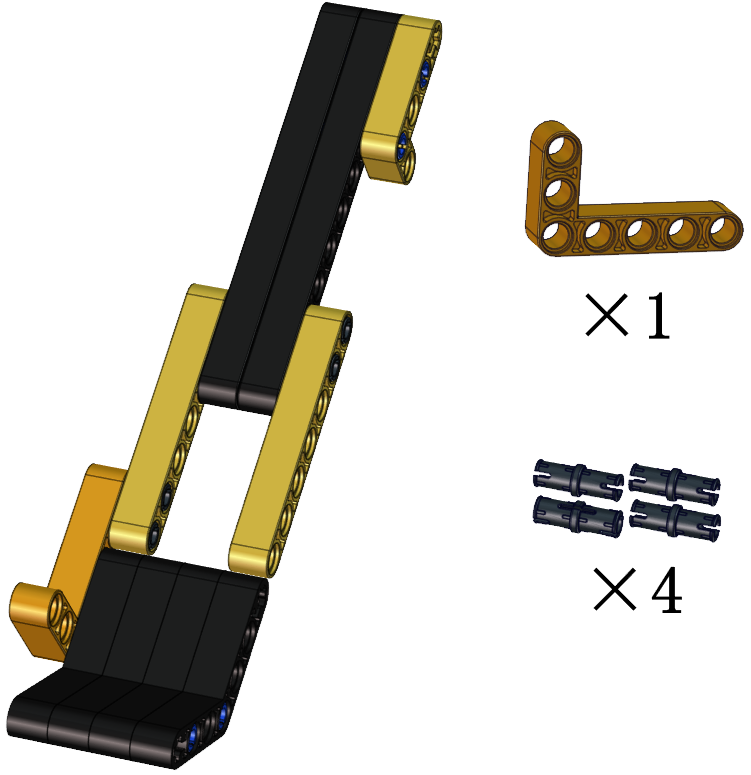
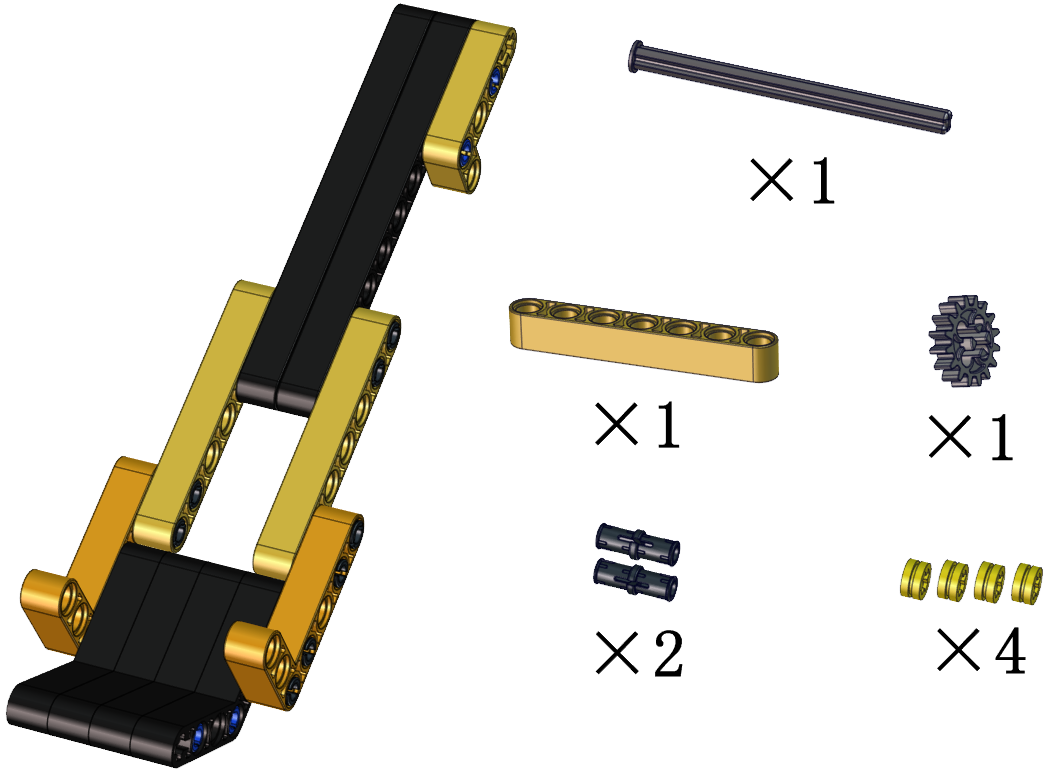
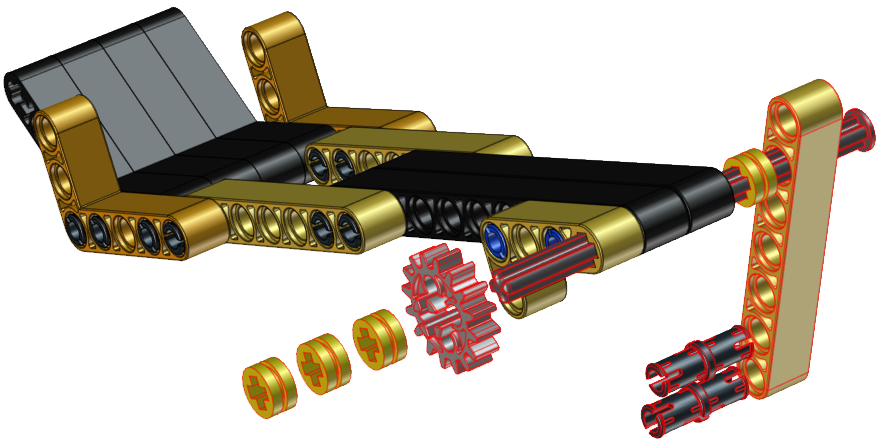
Required components
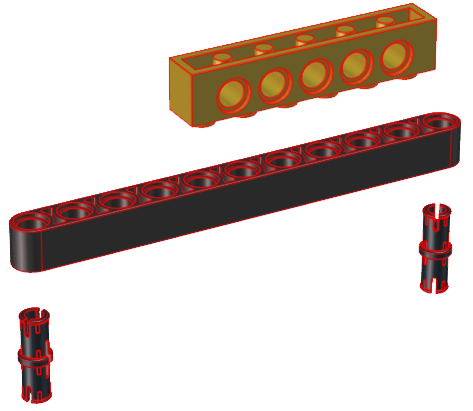
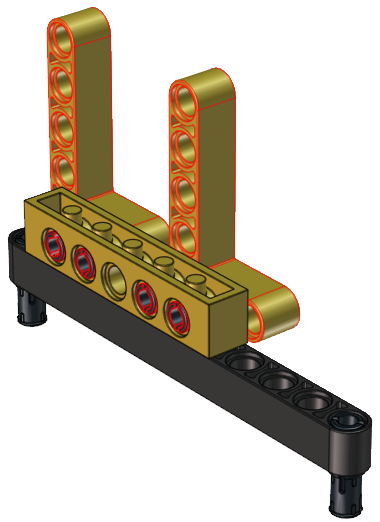
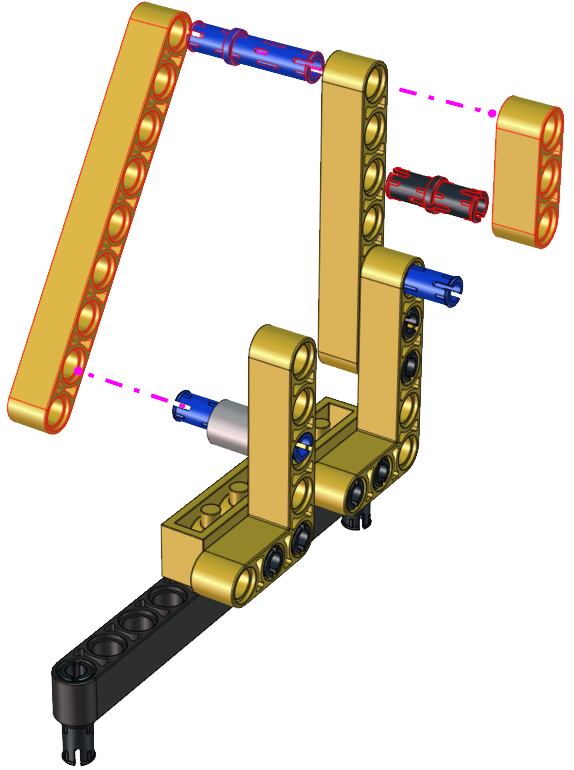
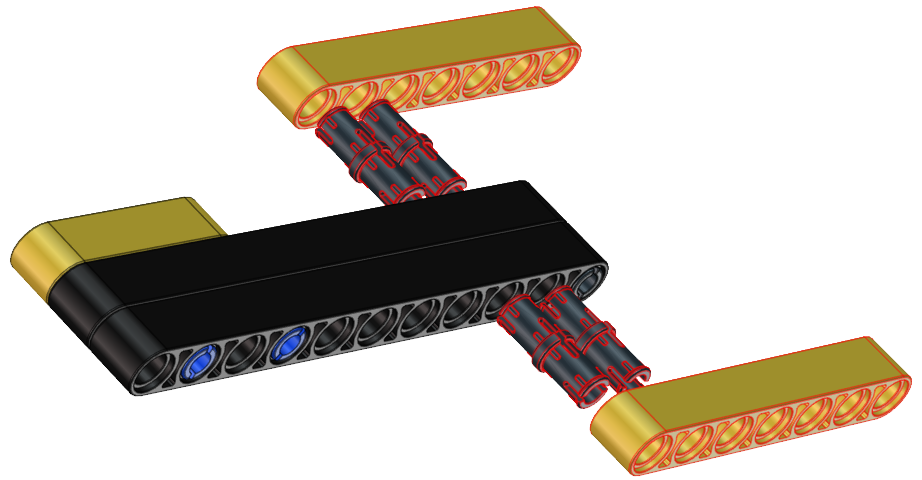
Install
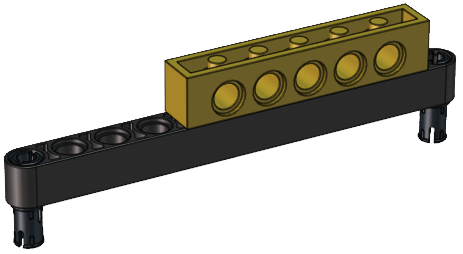
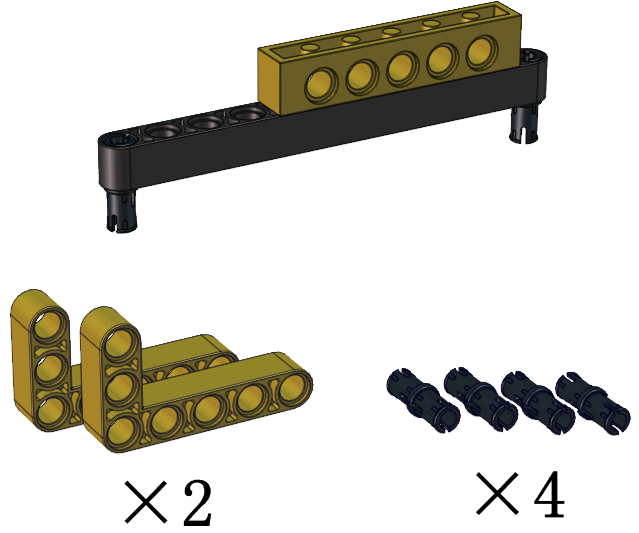
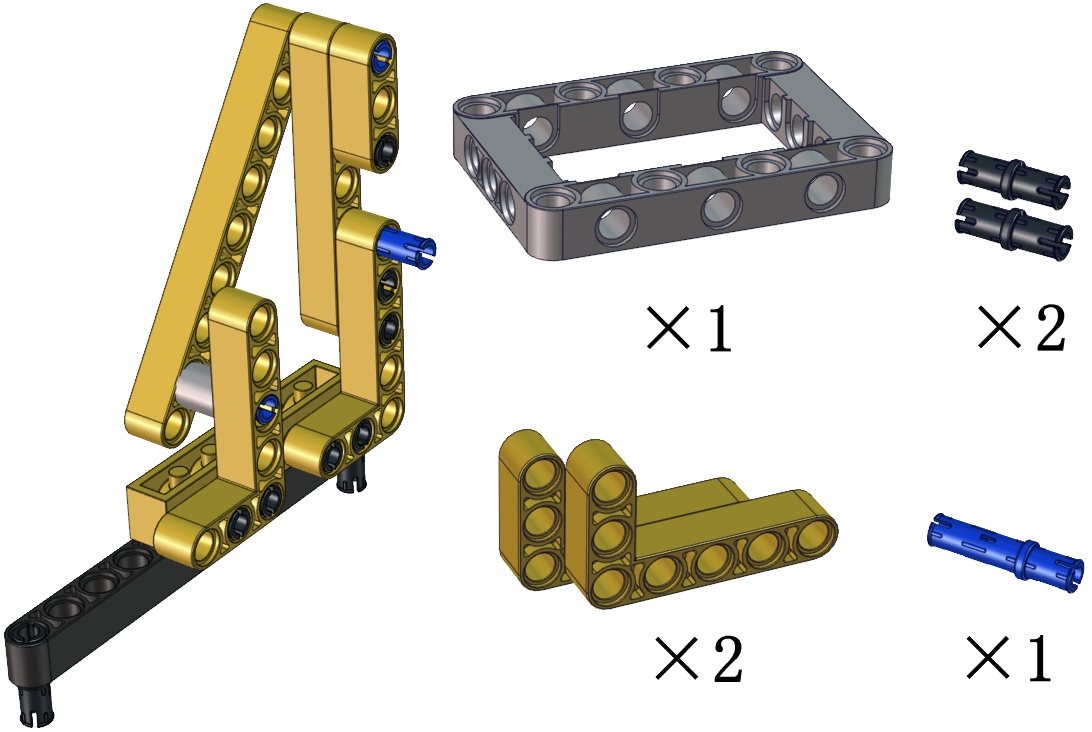
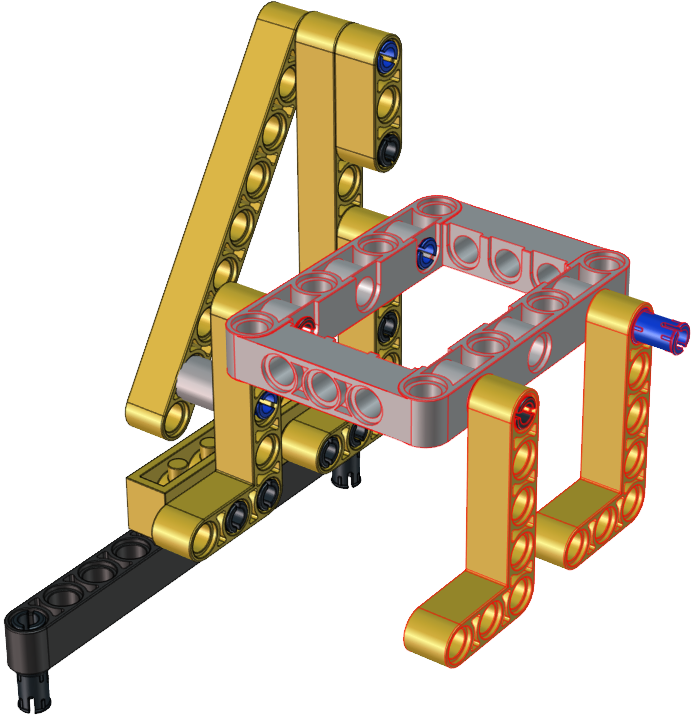
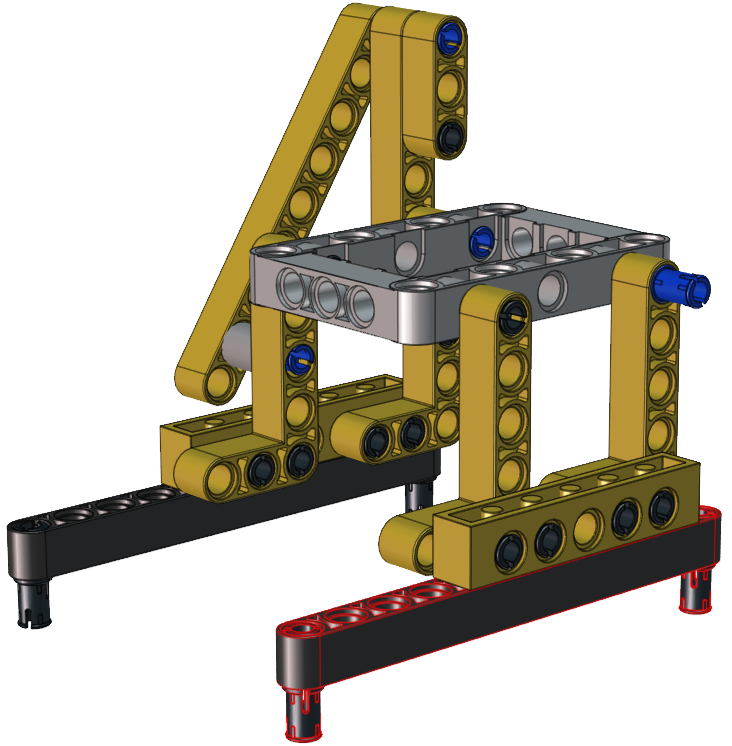
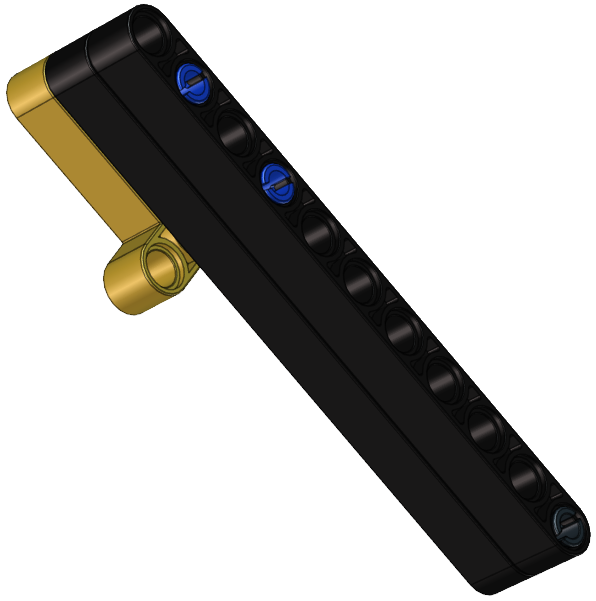
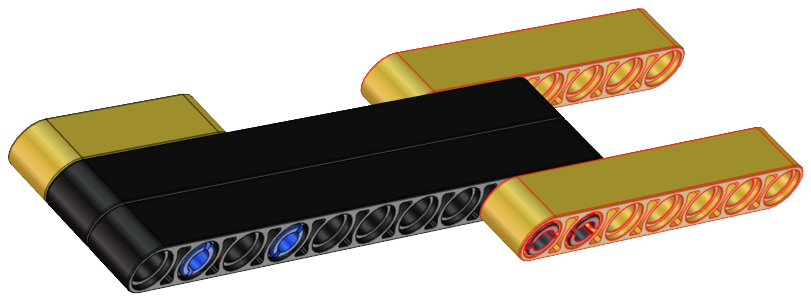
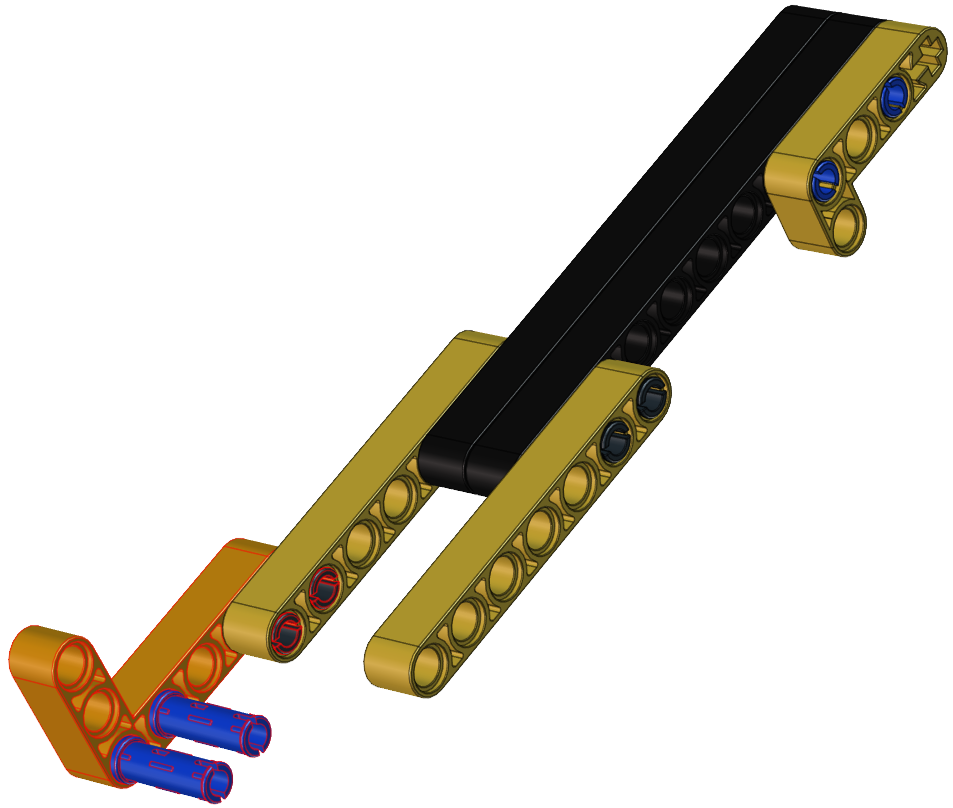
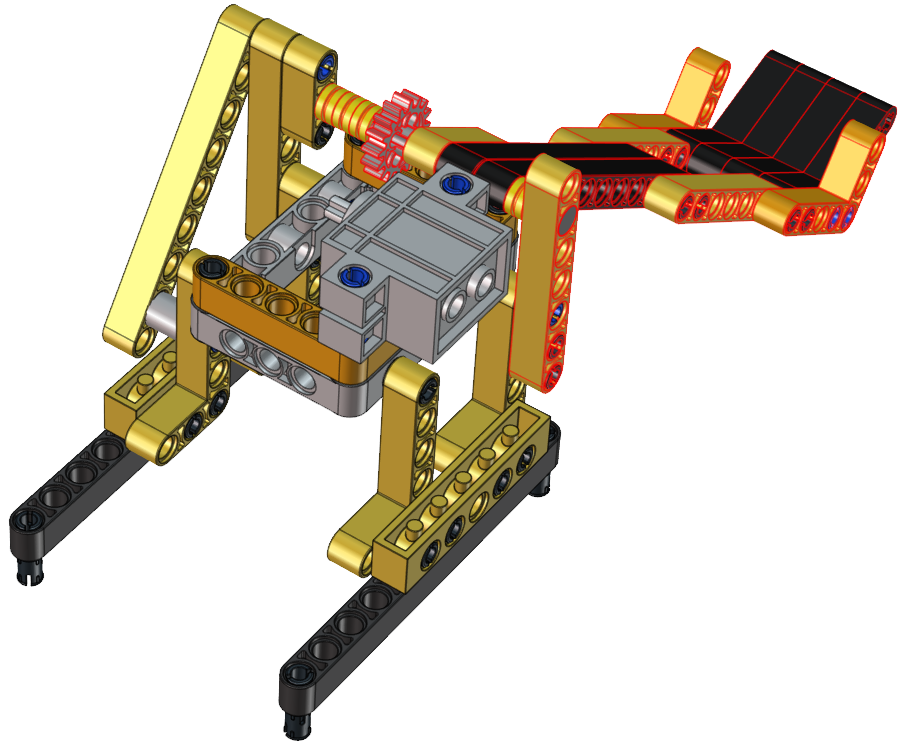
Complete
Step 2
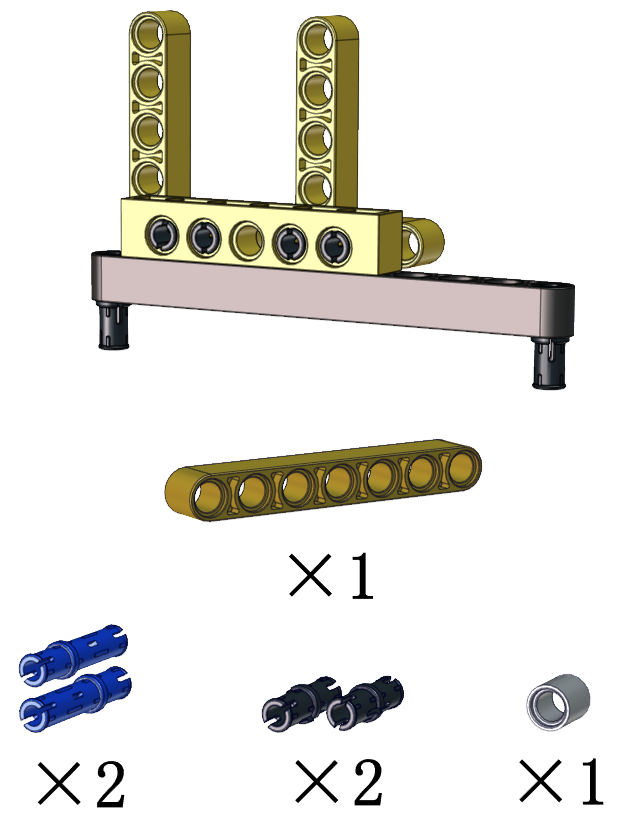
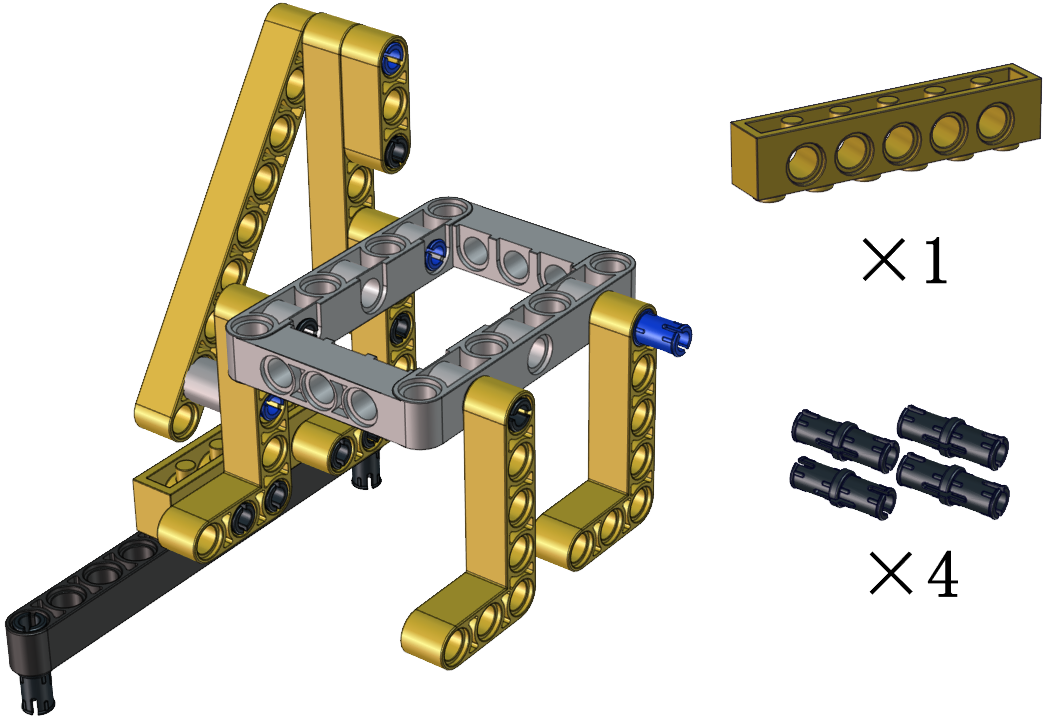
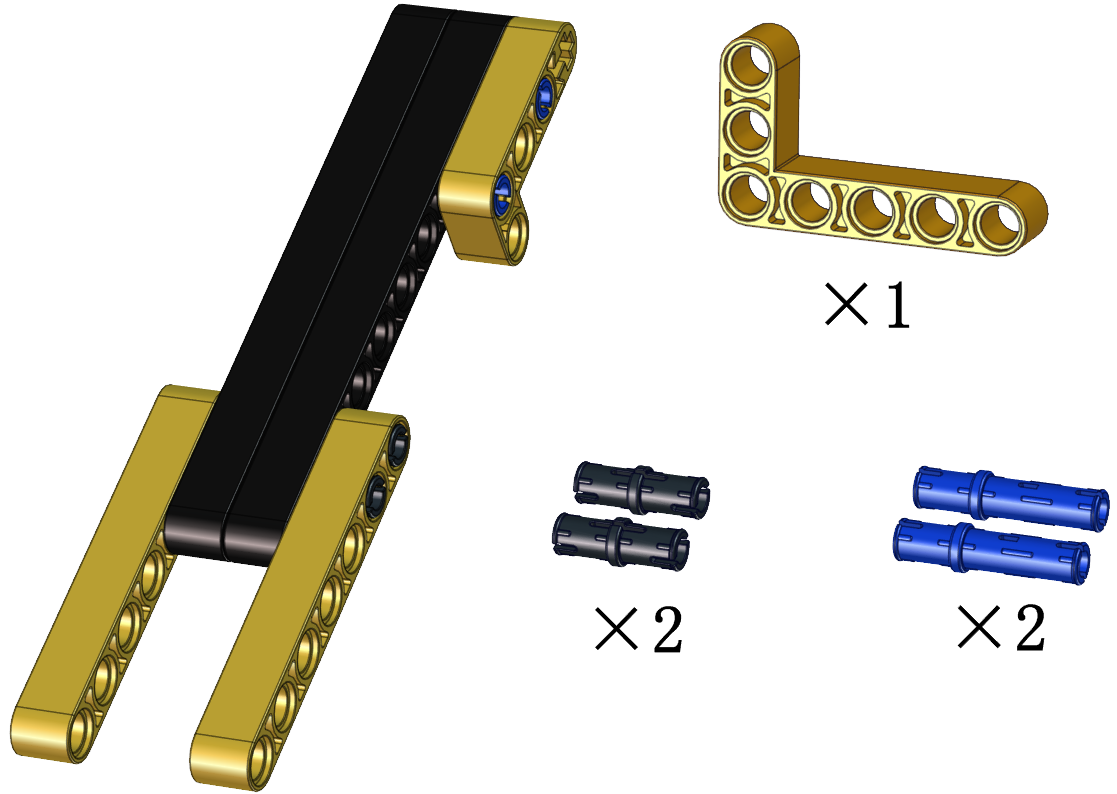
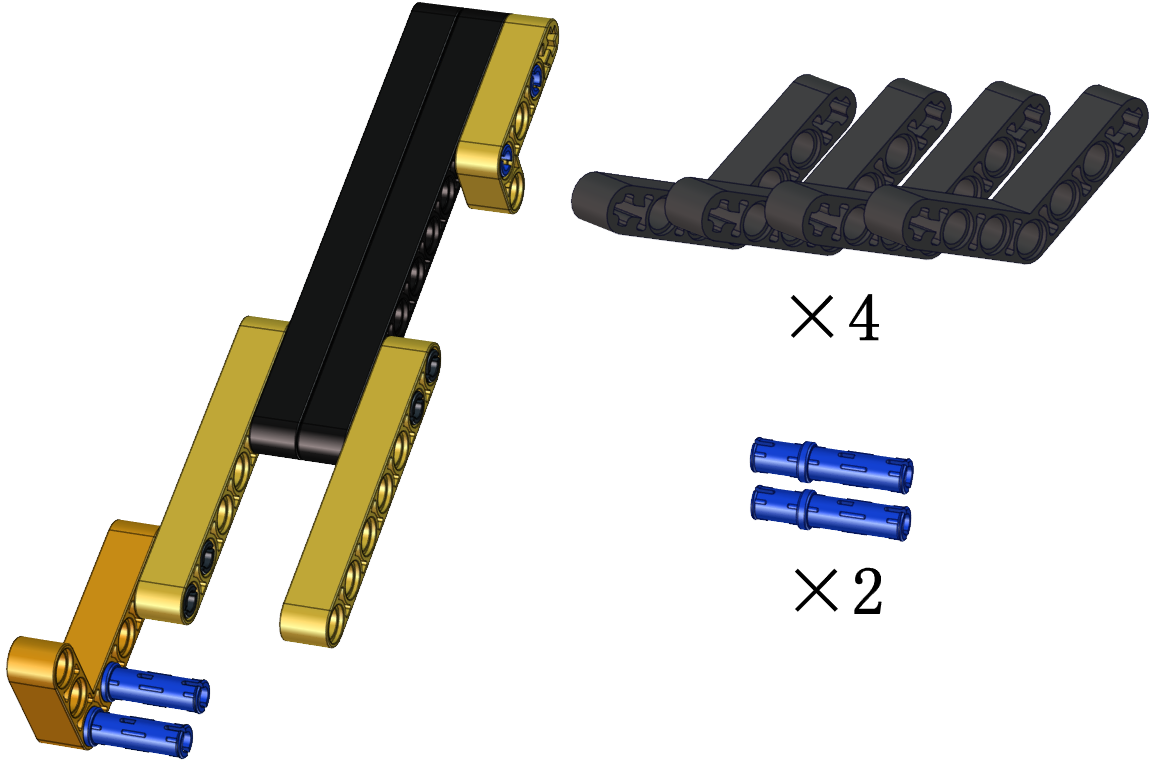
Required components
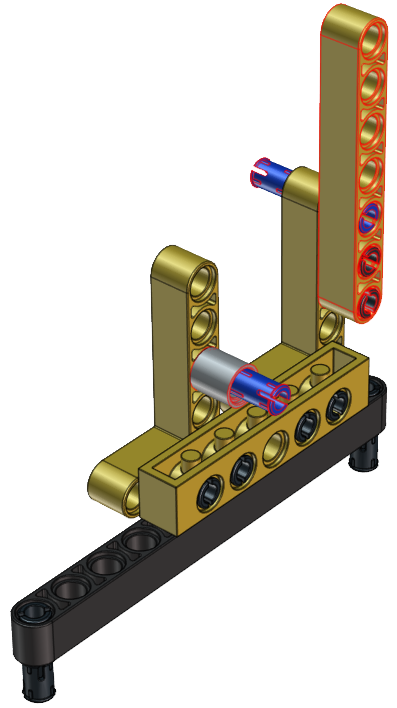
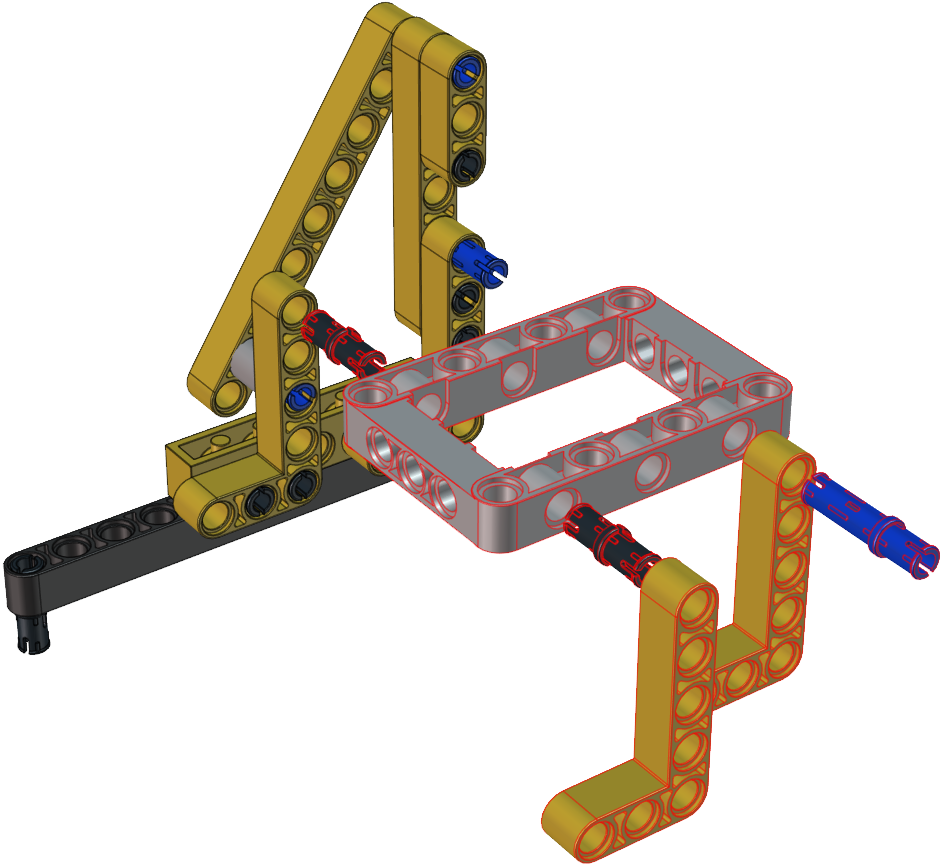
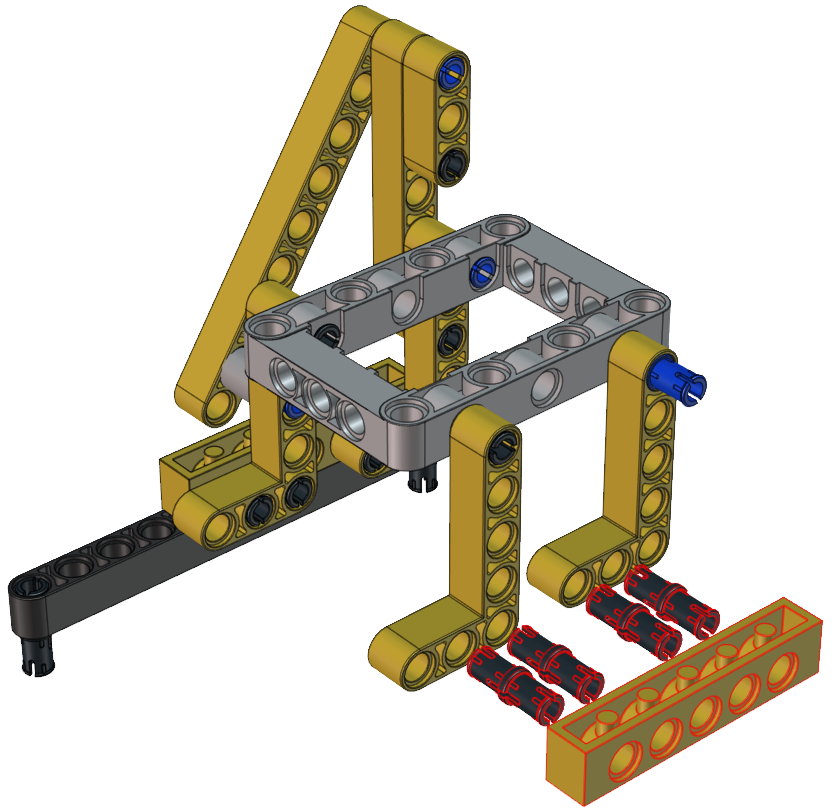
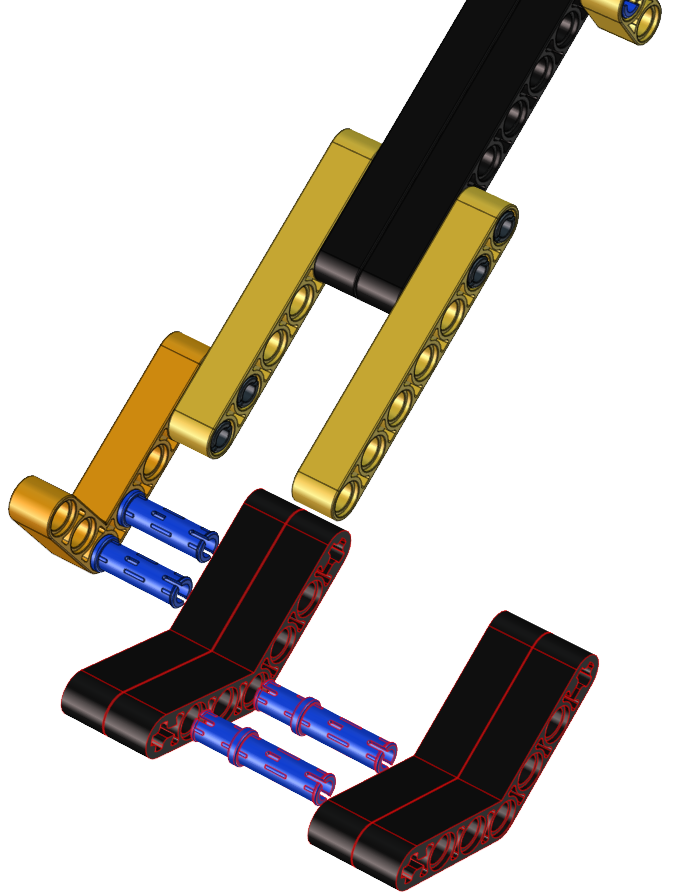
Install
Complete
Step 3
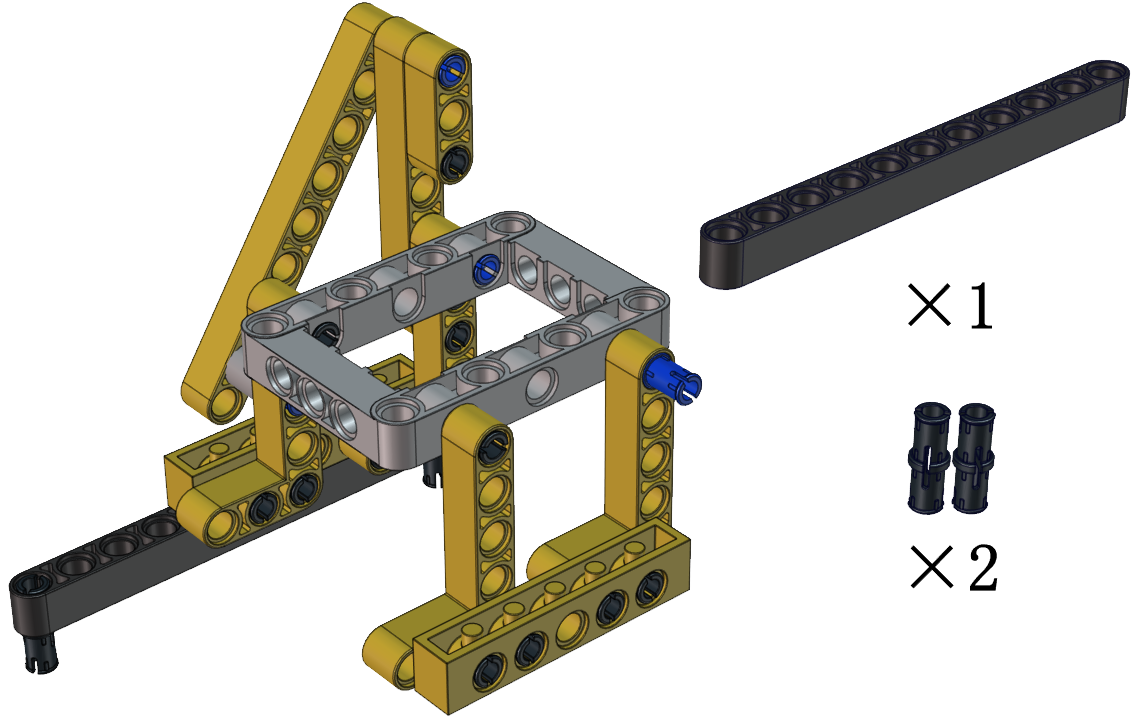
Required components
Install

Complete
Step 4
Required components
Install
Complete

Step 5
Required components
Install
Complete
Step 6
Required components
Install
Complete

Step 7
Required components
Install

Complete
Step 8
Required components
Install

Complete

Step 9
Required components

Install
Complete
Step 10
Required components
Install
Complete
Step 11
Required components
Install
Complete
Step 12
Required components
Install
Complete
Step 13
Required components
Install

Complete
Step 14
Required components
Install
Complete

Step 15
Required components

Install

Complete
Step 16
Required components

Install

Complete

Step 17
Required components

Set the angle of the servo to 0 degree
Wire servo up Servo |
PCB Board |
|---|---|
Brown |
G |
Red |
5V |
Orange |
S2(GPIO23) |
Method 1:Arduino code
Upload the code of the servo to the main board of the Beetlebot car, as shown below
#include <Arduino.h>
#include <ESP32Servo.h>
Servo myservo; // create servo object to control a servo
int servoPin = 23; // Servo motor pin
void setup() {
myservo.setPeriodHertz(50); // standard 50 hz servo
myservo.attach(servoPin, 500, 2500); // attaches the servo on servoPin to the servo object
myservo.write(0); // the angle of the steering gear is 0°.
delay(1000);
myservo.write(90); // the angle of the steering gear is 90°.
delay(1000);
myservo.write(0); // the angle of the steering gear is 0°.
delay(1000);
}
void loop() {
}
How to get it ?
In folder …\Codes\Catapult_Robot_Code\270° Servo Angle initialization , open file 270_Servo_Angle_initialization.ino , or copy and paste the above test code into the Arduino IDE.
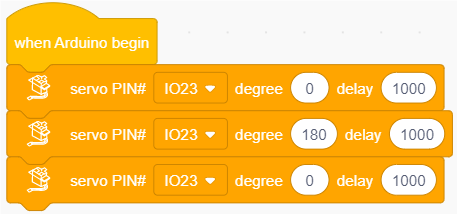
Method 2:KidsBlock(Scratch) code
You can also initialize the angle of the servo through the following code
How to get it?
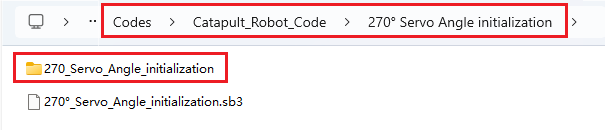
Open file 270°_Servo_Angle_initialization.sb3 with KidsBlock IDE, in folder …\Codes\Catapult_Robot_Code\270° Servo Angle initialization.
Install
Complete

Step 18
Required components
Install
Complete

Wire up
Interface the servo

Test Code for Arduino
⚠️ATTENTION: Before uploading code, please replace the WiFi name(REPLACE_WITH_YOUR_SSID) in the code and the passwords(REPLACE_WITH_YOUR_PASSWORD) into yours.
#include <WiFi.h>
#include <ESPmDNS.h>
#include <WiFiClient.h>
#include <ESP32Servo.h>
//motor
#define left_ctrl 33 //define direction control pins of the left motor as gpio33
#define left_pwm 26 //define PWM control pins of the left motor as gpio26.
#define right_ctrl 32 //define direction control pins of the right motor as gpio32.
#define right_pwm 25 //define PWM control pins of the right motor as gpio25
/*REPLACE WITH YOUR NETWORK CREDENTIALS(Put your SSID & Password)*/
const char* ssid = "REPLACE_WITH_YOUR_SSID"; //Enter SSID here
const char* password = "REPLACE_WITH_YOUR_PASSWORD"; //Enter Password here
// TCP server at port 80 will respond to HTTP requests
WiFiServer server(80);
//servo
const int servoPin = 23;//set the pin of the servo to gpio23.
Servo myservo; // create servo object to control a servo
void setup(void)
{
Serial.begin(115200);
pinMode(left_ctrl,OUTPUT); //set control pins of the left motor to OUTPUT
ledcAttach(left_pwm, 1200, 8); //Set the frequency of left_pwm pin to 1200, PWM resolution to 8 that duty cycle is 256.
pinMode(right_ctrl,OUTPUT);//set direction control pins of the right motor to OUTPUT..
ledcAttach(right_pwm, 1200, 8); //Set the frequency of right_pwm pin to 1200, PWM resolution to 8 that duty cycle is 256.
myservo.setPeriodHertz(50); // standard 50 hz servo
myservo.attach(servoPin, 500, 2500); // attaches the servo on servoPin to the servo object.
myservo.write(0); // the initial angle of the servo is set to 0° .
delay(300);
// Connect to WiFi network
WiFi.begin(ssid, password);
Serial.println("");
// Wait for connection
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Set up mDNS responder:
// - first argument is the domain name, in this example
// the fully-qualified domain name is "esp32.local"
// - second argument is the IP address to advertise
// we send our IP address on the WiFi network
if (!MDNS.begin("esp32")) {
Serial.println("Error setting up MDNS responder!");
while(1) {
delay(1000);
}
}
Serial.println("mDNS responder started");
// Start TCP (HTTP) server
server.begin();
Serial.println("TCP server started");
// Add service to MDNS-SD
MDNS.addService("http", "tcp", 80);
}
void loop(void)
{
// Check if a client has connected
WiFiClient client = server.available();
if (!client) {
return;
}
//Serial.println("");
//Serial.println("New client");
// Wait for data from client to become available
while(client.connected() && !client.available()){
delay(1);
}
// Read the first line of HTTP request
String req = client.readStringUntil('\r');
//Serial.println(req);
// First line of HTTP request looks like "GET /path HTTP/1.1"
// Retrieve the "/path" part by finding the spaces
int addr_start = req.indexOf(' ');
int addr_end = req.indexOf(' ', addr_start + 1);
if (addr_start == -1 || addr_end == -1) {
//Serial.print("Invalid request: ");
//Serial.println(req);
return;
}
req = req.substring(addr_start + 1, addr_end);
//Serial.print("Request: ");
Serial.println(req);
String s;
if (req == "/")
{
IPAddress ip = WiFi.localIP();
String ipStr = String(ip[0]) + '.' + String(ip[1]) + '.' + String(ip[2]) + '.' + String(ip[3]);
s = "HTTP/1.1 200 OK\r\nContent-Type: text/html\r\n\r\n<!DOCTYPE HTML>\r\n<html>Hello from ESP32 at ";
s += ipStr;
s += "</html>\r\n\r\n";
Serial.println("Sending 200");
client.println(WiFi.localIP());
}
else if(req == "/btn/F")
{
digitalWrite(left_ctrl,LOW); //set direction control pins of the left motor to LOW.
ledcWrite(left_pwm, 150); //the left motor outputs PWM 150
digitalWrite(right_ctrl,LOW); //set control pins of the right motor to LOW.
ledcWrite(right_pwm, 150); //the right motor outputs PWM 150
}
else if(req == "/btn/B")
{
digitalWrite(left_ctrl, HIGH);
ledcWrite(left_pwm, 150);
digitalWrite(right_ctrl, HIGH);
ledcWrite(right_pwm, 150);
}
else if(req == "/btn/L")
{
digitalWrite(left_ctrl,HIGH);
ledcWrite(left_pwm, 150);
digitalWrite(right_ctrl,LOW);
ledcWrite(right_pwm, 150);
}
else if(req == "/btn/R")
{
digitalWrite(left_ctrl,LOW);
ledcWrite(left_pwm, 150);
digitalWrite(right_ctrl,HIGH);
ledcWrite(right_pwm, 150);
}
else if(req == "/btn/S")
{
digitalWrite(left_ctrl,LOW);
ledcWrite(left_pwm, 0);
digitalWrite(right_ctrl,LOW);
ledcWrite(right_pwm, 0);
}
else if(req == "/btn/p")
{
Serial.write('p');
myservo.write(55);
delay(200);
}
else if(req == "/btn/q")
{
Serial.write('q');
client.println("q");
}
else if(req == "/btn/x")
{
myservo.write(0);
delay(200);
}
}
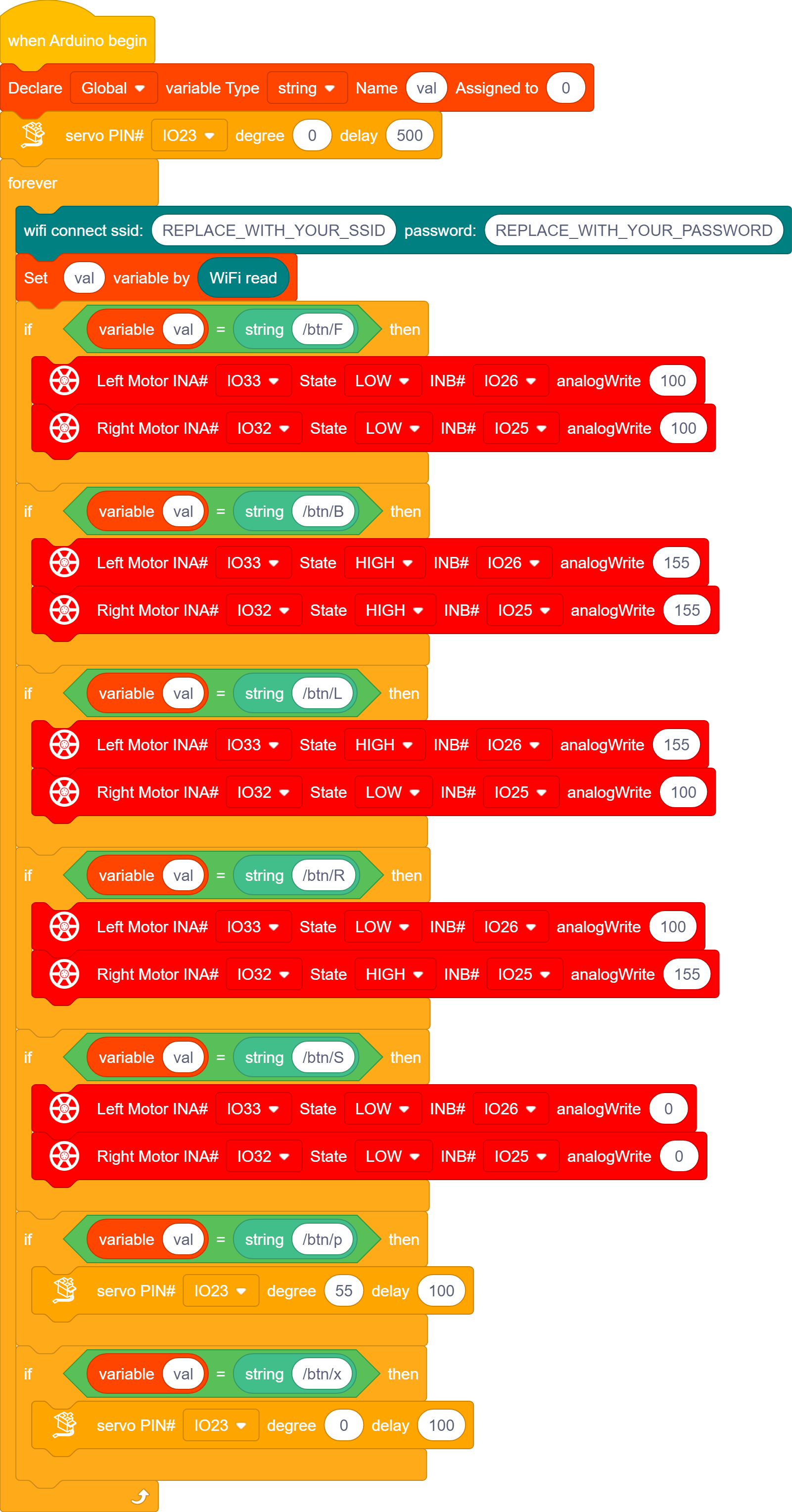
Test Code for Kidsblock
⚠️ATTENTION: Before uploading code, please replace the WiFi name(REPLACE_WITH_YOUR_SSID) in the code and the passwords(REPLACE_WITH_YOUR_PASSWORD) into yours.
Build up a few target objects with building blocks(object A, B, C, D, E) and keep them in a certain distance away the catapult and connect Wifi.
Click  to make the car to face the object A, hold down the button
to make the car to face the object A, hold down the button  to drive the catapult to launch a building block.
to drive the catapult to launch a building block.
Then release the button to make the long arm return to the original state. Next, let’s check if the object A is hit by the launched block
You can repeat above steps to hit the object B, C and D