Project 9: Bluetooth Multiple Function
Circuit Design
How to combine multiple functions for the frog robot we’ve learned? In this circuit, we use a complete code to program the smart car to switch different functions with Bluetooth APP, pretty simple and easy.
Wiring
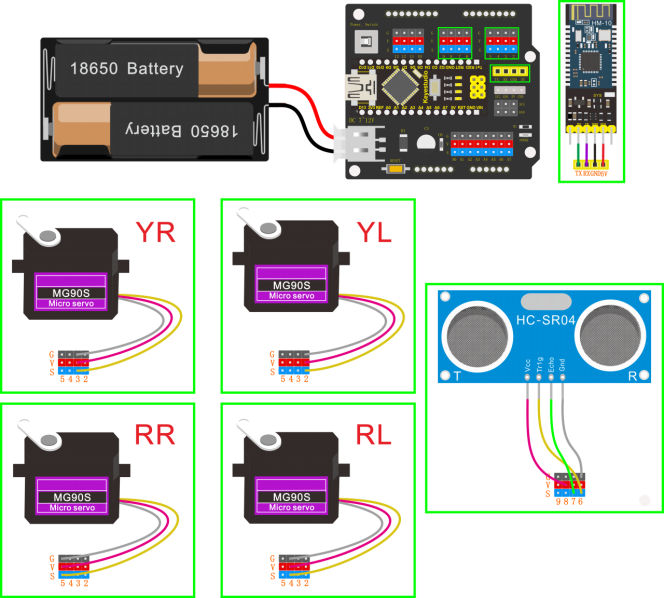
Stack the Nano ch340 onto the Nano shield; Connect ultrasonic sensor to Nano shield, VCC pin to 5V(V), Trig pin to digital 6 (S), Echo pin to digital 7 (S), GND pin to GND(G). Connect 4 servo motors to digital pin5,4,3,2 separately.
Plug in the Bluetooth module to pin TX, RX, GND, 5V. (RXD to TX, TXD to RX, GND to GND, VCC to 5V)
Code
#include <Servo.h>
#include <Oscillator.h>
#include <EEPROM.h>
#define N_SERVOS 4
//-- First step: Configure the pins where the servos are attached
/*
---------------
| O O |
|---------------|
YR 3==> | | <== YL 2
---------------
|| ||
|| ||
RR 5==> ----- ------ <== RL 4
|----- ------|
*/
#define EEPROM_TRIM false
//adjust the initial angles of servos
#define TRIM_RR (-5) //right02
#define TRIM_RL 5 //left02
#define TRIM_YR (-5) //right01
#define TRIM_YL 0 //left01
//pins of the servo
#define PIN_RR 5
#define PIN_RL 4
#define PIN_YR 3
#define PIN_YL 2
#define INTERVALTIME 10.0
Oscillator servo[N_SERVOS];
#include "SR04.h"
#define TRIG_PIN 6 //sending pins of the ultrasonic sensor
#define ECHO_PIN 7 //receiving pins of the ultrasonic sensor
SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN);
long a;
int i = 0;
int val = 0;
//each function declaration
void goingUp(int tempo);
void drunk (int tempo);
void noGravity(int tempo);
void kickLeft(int tempo);
void kickRight(int tempo);
void run(int steps, int T=500);
void walk(int steps, int T=1000);
void backyard(int steps, int T=3000);
void backyardSlow(int steps, int T=5000);
void turnLeft(int steps, int T=3000);
void turnRight(int steps, int T=3000);
void moonWalkLeft(int steps, int T=1000);
void moonWalkRight(int steps, int T=1000);
void crusaito(int steps, int T=1000);
void swing(int steps, int T=1000);
void upDown(int steps, int T=1000);
void flapping(int steps, int T=1000);
int t=495;
double pause=0;
volatile int distance; //Integer variable used to store the distance value received by the ultrasonic sensor
volatile int flag; //Set the integer variable flag
//stop
void Stop()
{
for(int i=0;i<4;i++) servo[i].SetPosition(90);
}
//go back
void backyard(int steps, int T)
{
int A[4]= {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(-90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
char bluetooth_val; //Character variable, used to store the value received by Bluetooth
//turn left
void turnLeft(int steps, int T)
{
int A[4]= {20, 20, 10, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
//turn right
void turnRight(int steps, int T)
{
int A[4]= {20, 20, 30, 10};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
//go forward
void walk(int steps, int T)
{
int A[4]= {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void oscillate(int A[N_SERVOS], int O[N_SERVOS], int T, double phase_diff[N_SERVOS]){
for (int i=0; i<4; i++) {
servo[i].SetO(O[i]);
servo[i].SetA(A[i]);
servo[i].SetT(T);
servo[i].SetPh(phase_diff[i]);
}
double ref=millis();
for (double x=ref; x<T+ref; x=millis()){
for (int i=0; i<4; i++){
servo[i].refresh();
}
}
}
unsigned long final_time;
unsigned long interval_time;
int oneTime;
int iteration;
float increment[N_SERVOS];
int oldPosition[]={90,90,90,90};
void moveNServos(int time, int newPosition[]){
for(int i=0;i<N_SERVOS;i++) increment[i] = ((newPosition[i])-oldPosition[i])/(time/INTERVALTIME);
final_time = millis() + time;
iteration = 1;
while(millis() < final_time){ //Javi del futuro cambia esto
interval_time = millis()+INTERVALTIME;
oneTime=0;
while(millis()<interval_time){
if(oneTime<1){
for(int i=0;i<N_SERVOS;i++){
servo[i].SetPosition(oldPosition[i] + (iteration * increment[i]));
}
iteration++;
oneTime++;
}
}
}
for(int i=0;i<N_SERVOS;i++){
oldPosition[i] = newPosition[i];
}
}
float checkdistance() { //distance measuring function
//Generate a 10us high pulse to trigger TrigPin
digitalWrite(6, LOW); //Set pin 6 output voltage low
delayMicroseconds(2); //delay in 20ms
digitalWrite(6, HIGH); //Set pin 6 output voltage high
delayMicroseconds(10); //delay in 10ms
digitalWrite(6, LOW); //Set pin 6 output voltage low
// Detect pulse width and calculate distance
float distance = pulseIn(7, HIGH) / 58.00; // Read the high-level pulse on pin 7, divide the maximum pulse time by 58.00, and assign the result to the distance variable as a floating value delay(10); // delay in 10ms
return distance; //return the distance value
}
//slide
void crusaito(int steps, int T){
int A[4]= {25, 25, 30, 30};
int O[4] = {- 15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
//dance
void dance() {
flag = 1; //variable flag=1
while (flag == 1) { //当variable flag=1时
goingUp(2*t); //tiptoe in 2*t
for (int i = 0; i <= 2; i = i + (1)) { //set the variable i to save times of friction, from 0 to 2, the step is 1
segunda1(); // robots rub on the floor
}
for (int i = 0; i <= 2; i = i + (1)) { //set the variable i to save times of jumping, step is 1
jump(); // robots jump
}
walk(3,2*t); //go forward for 3 steps in 2*t
backyard(3,2*t); //go forward for 3 steps in 2*t
crusaito(1,5*t); //slide for 1 step in 5*t
crusaito(1,1*t); //slide for 1 step in 1*t
crusaito(1,3*t); //slide for 1 step in 3*t
for (int i = 0; i <= 2; i = i + (1)) { //set the variable i to save times of swinging, from 0 to 2, step is 1
drunk(4*t); //move in 4*t
}
moonLEFT(5,2*t); //left moon walking for 5 steps in 2*t
noGravity(2*t); //in no gravity in 2*t
swing(5,2*t); //swing for 5 steps in 2*t
moonRight(5,2*t); //Right moonwalking for five steps in 2*t
Stop(); //stop
kickLeft(t); //kick left
for (int i = 0; i <= 2; i = i + (1)) { //set the variable i to save times of jumping, step is 1
jump(); //jump
}
Stop(); //stop
kickRight(t); //kick right
for (int i = 0; i <= 2; i = i + (1)) { //set the variable i to save times of jumping, step is 1
jump(); //jump
}
Stop(); //stop
flag = 0; //the variable flag=0
bluetooth_val = 'S'; //the value of the bluetooth_val is‘S’
}
}
//drunk
void drunk (int tempo){
pause=millis();
int move1[] = {60,70,90,90};
int move2[] = {110,120,90,90};
int move3[] = {60,70,90,90};
int move4[] = {110,120,90,90};
moveNServos(tempo*0.235,move1);
moveNServos(tempo*0.235,move2);
moveNServos(tempo*0.235,move3);
moveNServos(tempo*0.235,move4);
while(millis()<(pause+tempo));
}
//follow
void follow() {
flag = 1; //variable flag=1
while (flag == 1) { //当variable flag=1
distance = checkdistance(); //Assign the value of checkdistance() to the variable distance()
if (distance > 20 && distance < 60) { //if distance > 20 and distance < 60
walk(1,2*t); //move forward for 1 step in 2*t
} else if (distance > 10 && distance < 20) { //or else distance > 10 and distance <= 20
Stop(); //stop
} else if (distance <= 10) { //or else distance <= 10
backyard(1,2*t); //go back for 1 step in 2*t
} else { //or above conditions are not met
Stop(); //stop
}
if (Serial.available()) //Determine whether there is data in the serial port buffer
{
bluetooth_val = Serial.read(); //Read data from serial port buffer
if (bluetooth_val == 'S') { //if the value of the bluetooth_val is‘S’
flag = 0; //variable flag = 0
}
}
}
}
//tiptoe
void goingUp(int tempo){
pause=millis();
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(80);
servo[1].SetPosition(100);
delay(tempo);
servo[0].SetPosition(70);
servo[1].SetPosition(110);
delay(tempo);
servo[0].SetPosition(60);
servo[1].SetPosition(120);
delay(tempo);
servo[0].SetPosition(50);
servo[1].SetPosition(130);
delay(tempo);
while(millis()<pause+8*t);
}
//robots jump
void jump()
{
int move5[4] = {70,110,80,100};
int move6[4] = {70,110,100,80};
int move7[4] = {90,90,80,100};
int move8[4] = {90,90,100,80};
pause=millis();
moveNServos(t*0.15,move5);
moveNServos(t*0.15,move6);
moveNServos(t*0.15,move7);
moveNServos(t*0.15,move8);
while(millis()<(pause+t));
}
//kick left
void kickLeft(int tempo){
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(50); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(30); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(30); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo);
}
//kick right
void kickRight(int tempo){
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(130); //pie izquiero
delay(tempo);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(100); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(150); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(80); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(150); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(100); //pie izquiero
delay(tempo);
}
//left moon walking
void moonLEFT(int steps, int T)
{
int A[4]= {25, 25, 0, 0};
int O[4] = {-15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 - 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
//right moon walking
void moonRight(int steps, int T)
{
int A[4]= {25, 25, 0, 0};
int O[4] = {-15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
//no gravity
void noGravity(int tempo){
int move1[4] = {120,140,90,90};
int move2[4] = {140,140,90,90};
int move3[4] = {120,140,90,90};
int move4[4] = {90,90,90,90};
for(int i=0;i<4;i++) servo[i].SetPosition(90);
for(int i=0;i<N_SERVOS;i++) oldPosition[i]=90;
moveNServos(tempo*2,move1);
moveNServos(tempo*2,move2);
delay(tempo*2);
moveNServos(tempo*2,move3);
moveNServos(tempo*2,move4);
}
//friction
void segunda1()
{
int move1[4] = {90,90,80,100};
int move2[4] = {90,90,100,80};
int move3[4] = {90,90,80,100};
int move4[4] = {90,90,100,80};
pause=millis();
moveNServos(t*0.15,move1);
moveNServos(t*0.15,move2);
moveNServos(t*0.15,move3);
moveNServos(t*0.15,move4);
while(millis()<(pause+t));
}
//swing
void swing(int steps, int T){
int A[4]= {15, 15, 8, 8};
int O[4] = {-A[0], A[1], 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180), DEG2RAD(90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void setup(){
distance = 0;
flag = 0;
Serial.begin(9600);
servo[0].attach(PIN_RR);
servo[1].attach(PIN_RL);
servo[2].attach(PIN_YR);
servo[3].attach(PIN_YL);
int trim;
if(EEPROM_TRIM){
for(int x=0;x<4;x++){
trim=EEPROM.read(x);
if(trim>128)trim=trim-256;
Serial.print("TRIM ");
Serial.print(x);
Serial.print(" en ");
Serial.println(trim);
servo[x].SetTrim(trim);
}
}
else{
servo[0].SetTrim(TRIM_RR);
servo[1].SetTrim(TRIM_RL);
servo[2].SetTrim(TRIM_YR);
servo[3].SetTrim(TRIM_YL);
}
for(int i=0;i<4;i++) servo[i].SetPosition(90);
Serial.begin(9600);
Serial.begin(9600);
pinMode(6, OUTPUT);
pinMode(7, INPUT);
}
void loop(){
if (Serial.available()) //Determine whether there is data in the serial port buffer
{
bluetooth_val = Serial.read(); //Read data from serial port buffer
Serial.println(bluetooth_val); //print out
}
switch (bluetooth_val) { //The value of the variable bluetooth_val is compared with each case one by one
case 'F': //when the variable bluetooth_val is 'F'
walk(1,2*t); //move forward for 1 step in 2*t
break; //exit the switch-case statement
case 'B': //when the variable bluetooth_val is 'B'
backyard(1,2*t); //go back for 1 step in 2*t
break;
case 'L': //when the variable bluetooth_val is 'L'
turnLeft(1,2*t); //turn left for 1 step in 2*t
break;
case 'R': //When the value of the variable bluetooth_val is 'R'
turnRight(1,2*t); //move to right for 1 step in 2*t
break;
case 'S': //When the value of the variable bluetooth_val is 'S'
Stop(); //stop
break;
case '1': //when the value of the variable bluetooth_val is '1'
moonLEFT(1,2*t); // left moon walking for 1 step in 2*t
break;
case '2': //when the value of the variable bluetooth_val is '2”
moonRight(1,2*t); //right moon walking for 1 step in 2*t
break;
case '3': //when the value of the variable bluetooth_val is '3'
kickRight(t); //kick right
break;
case '4': //when the value of the variable bluetooth_val is '4'
kickLeft(t); //kick left
break;
case '6': //when the value of the variable bluetooth_val is '6”'
noGravity(2*t); //no gravity in 2*t
break;
case '7': //when the value of the variable bluetooth_val is '7'
crusaito(1,5*t); //slide for 1 step in 5*t
crusaito(1,1*t); //slide for 1 step in 1*t
crusaito(1,3*t); //slide for 1 step in 3*t
break;
case '8': //when the value of the variable bluetooth_val is '8'
segunda1(); // robots rub on the floor
break;
case 'G': //when the value of the variable bluetooth_val is 'G'
drunk(4*t); //move in 4*t
break;
case '9': //when the value of the variable bluetooth_val is '9'
jump(); //jump
break;
case 'H': //when the value of the variable bluetooth_val is 'H'
swing(1,2*t); //swing for 1 step in 2*t
break;
case 'J': //when the value of the variable bluetooth_val is 'J'
goingUp(2*t); //tiptoe in 2*t
break;
case 'P': //when the value of the variable bluetooth_val is 'P'
dance(); //dance
break;
case 'U': //when the value of the variable bluetooth_val is 'U'
follow(); //follow
break;
}
}
Note: should upload the code success first, then plug in Bluetooth module. Otherwise, code upload fails.
Result
Upload the code to keyestudio nano ch340 success;
Stack keyestudio nano ch340 onto Nano Shield;
Connect Keyestudio nano ch340 to computer with a mini USB cable.
Install well the Bluetooth APP;
Powered on, press down the Power_Switch on Nano Shield. The indicator on Bluetooth module flashes. So you can open mobile Bluetooth APP to connect the Bluetooth module;
Bluetooth connected, aim at the Bluetooth module, tap the key on the Bluetooth APP. We can make the robot do any motions.
