1. Einstieg in den 4WD-Roboter
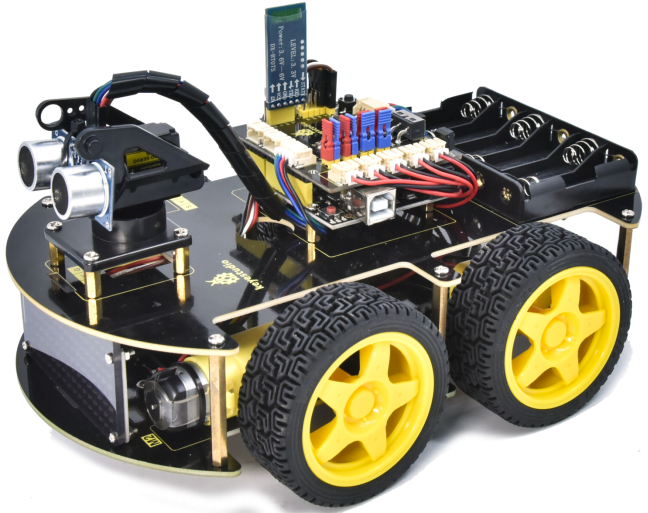
1.1 Einführung
Das neu aufgerüstete 4WD-Multifunktionsfahrzeug ist eines der beliebtesten Arduino-Sets. Es besticht nicht nur durch ein schönes Design, sondern auch durch leistungsstarke Funktionen. Neben den üblichen Funktionen wie Linienverfolgung, Hindernisvermeidung und Fernsteuerung verwendet es auch Gesichtsausdrücke, um niedliche Mimiken darzustellen. Darüber hinaus haben Sie die Möglichkeit, eigene Projekte zu erweitern oder weitere Sensoren hinzuzufügen, um Ihre Erkundungen zu vervollständigen.
Die meisten Komponenten sind über Schrauben und Kupferabstandshalter verbunden, sodass Sie Ihren eigenen Roboter durch einige einfache Montageschritte bauen können.
Außerdem sind grundlegende Kenntnisse wie Linienverfolgung, Hindernisvermeidungssensoren, Ultraschallentfernungsmessung, Bluetooth-Kommunikation, Motortreiber sowie IR-Fernbedienungen für uns zugänglich, um sie zu erlernen.
Dieses Produkt bietet 17 Lernprojekte, von einfach bis komplex, die Sie Schritt für Schritt anleiten, einen Arduino-Roboter zu bauen.
1.2 Kit-Liste
# |
Name |
Menge |
Bild |
|---|---|---|---|
1 |
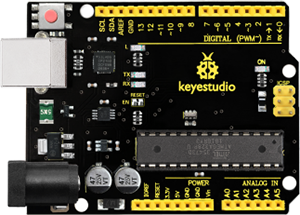
Keyestudio V4.0 Board (UNO kompatibel) |
1 |
|
2 |
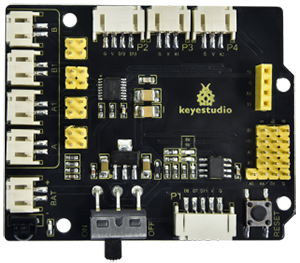
Keyestudio Motor Driver Erweiterungsplatine |
1 |
|
3 |
Bluetooth-Modul |
1 |
|
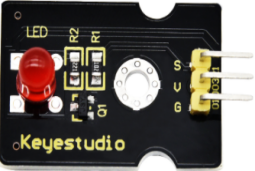
4 |
Rotes LED-Modul |
1 |
|
5 |
Ultraschallsensor |
1 |
|
6 |
Keyestudio Linienverfolgungssensor |
1 |
|
7 |
Keyestudio 8*16 LED-Board (4-Pin Anschlusskabel) |
1 |
|
8 |
Servo |
1 |
|
9 |
IR-Fernbedienung |
1 |
|
10 |
USB-Kabel |
1 |
|
11 |
18650 Batteriehalter |
1 |
|
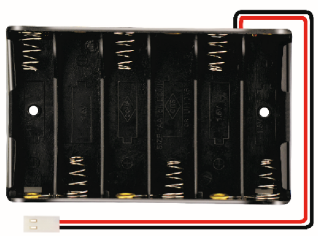
12 |
6 AA Batteriehalter |
1 |
|
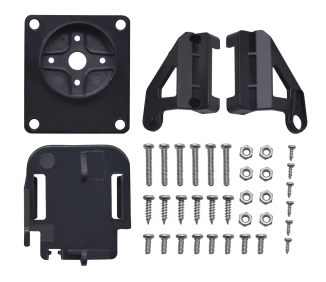
13 |
Kopfhalterung |
1 |
|
14 |
150MM JST-PH2.0MM-5P 24AWG Kabel |
1 |
|
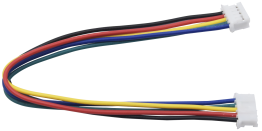
15 |
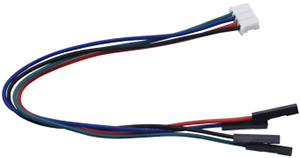
150MM PH2.0mm-4P zu 2.54 Dupont Kabel |
1 |
|
16 |
Acrylplatte |
1 |
|
17 |
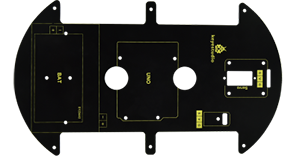
Keyestudio Oberplatte |
1 |
|
18 |
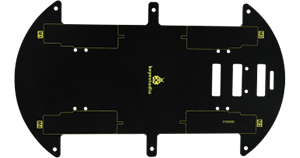
Keyestudio Basisplatte |
1 |
|
19 |
Befestigungsteile |
4 |
|
20 |
Räder |
4 |
|
21 |
M3*10MM Durchgang Kupferabstandshalter |
10 |
|
22 |
M3*40MM Durchgang Kupferabstandshalter |
4 |
|
23 |
M3*30MM Rundkopfschraube |
8 |
|
24 |
M3*6MM Rundkopfschraube |
40 |
|
25 |
M3 Nickel-beschichtete Mutter |
16 |
|
26 |
M2*8MM Rundkopfschraube |
6 |
|
27 |
M3*8MM Rundkopfschraube |
4 |
|
28 |
M2 Nickel-beschichtete Mutter |
6 |
|
29 |
M3*10MM Senkkopfschraube |
3 |
|
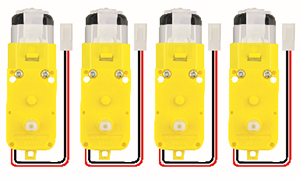
30 |
Motor |
4 |
|
31 |
Schraubendreher |
1 |
|
32 |
Schwarze Kabelbinder |
6 |
|
33 |
Kabelschutzrohr |
1 |
|
34 |
20CM 3-poliges F-F Dupont-Kabel |
1 |
|
35 |
Dekorationskarte |
1 |
|
36 |
Blauer Jumper Cap |
4 |
|
37 |
Roter Jumper Cap |
4 |
|
38 |
Linienverfolgungsstrecke |
1 |
|


























1.3 Merkmale
Multifunktional: Hindernisvermeidung, Folgen, IR-Fernsteuerung, Bluetooth-Steuerung, Begrenzung durch einen Kreis, Schwerkraftsteuerung sowie Anzeige von Gesichtsemoticons.
Einfache Montage: Kein Löten der Schaltung erforderlich, einfache Montage.
Robuste Konstruktion: 4WD-Aufbau, 4 hochwertige Motoren und Räder.
Hohe Erweiterbarkeit: Erweiterbar mit weiteren Sensoren und Modulen über eine Motor-Treiber-Erweiterungsplatine.
Vielfältige Steuerungsmöglichkeiten: IR-Fernsteuerung, App-Steuerung (iOS und Android-System)
Grundprogrammierung: C-Sprachcode für die Arduino IDE.
1.4 Spezifikation
Betriebsspannung: 5V
Eingangsspannung: 6-9V
Maximaler Ausgangsstrom: 2A
Maximale Leistungsaufnahme: 25W (T=75℃)
Motordrehzahl: 5V 200 U/min
Motorantriebsart: DRV8833 Motor-Treiber
Ultraschall-Induktionswinkel: <15 Grad
Ultraschall-Erkennungsdistanz: 2cm-400cm
Infrarot-Fernsteuerungsreichweite: 10M (gemessen)
Bluetooth-Fernsteuerungsreichweite: 50M (gemessen)
Bluetooth-Steuerung: unterstützt Android- und iOS-Systeme
1.5 Entwicklungsboard
Sie sollten wissen, dass das keyestudio V4.0 Entwicklungsboard das Herzstück dieses 4WD BT Multifunktionsautos V2.0 ist.
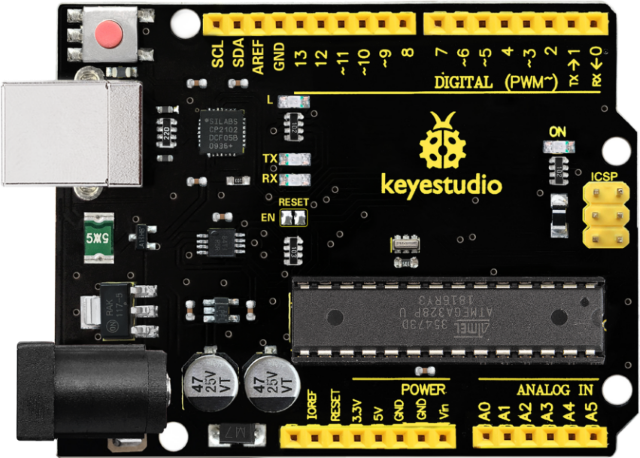
Das Keyestudio V4.0 Entwicklungsboard ist ein Arduino Uno-kompatibles Board, das auf dem ATmega328P MCU basiert und einen CP2102-Chip als UART-zu-USB-Konverter verwendet.
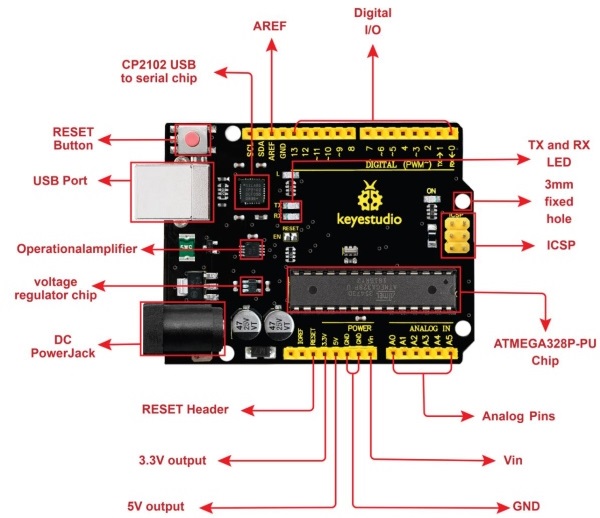
Es verfügt über 14 digitale Ein-/Ausgangspins (davon können 6 als PWM-Ausgänge genutzt werden), 6 analoge Eingänge, einen 16 MHz Quarzoszillator, einen USB-Anschluss, eine Strombuchse, 2 ICSP-Header und einen Reset-Knopf.
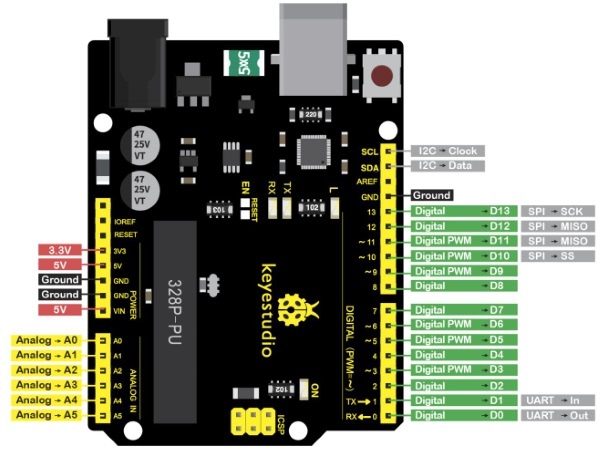
Es enthält alles, was zur Unterstützung des Mikrocontrollers benötigt wird: Einfach mit einem USB-Kabel an einen Computer anschließen oder über eine externe DC-Strombuchse (DC 7-12V) oder über weibliche Header Vin/GND (DC 7-12V) mit Strom versorgen, um zu starten.
Mikrocontroller |
ATmega328P-PU |
|---|---|
Betriebsspannung |
5V |
Eingangsspannung (empfohlen) |
DC 7-12V |
Digitale I/O-Pins |
14 (D0-D13) (davon 6 mit PWM-Ausgang) |
PWM Digitale I/O-Pins |
6 (D3, D5, D6, D9, D10, D11) |
Analoge Eingänge |
6 (A0-A5) |
Gleichstrom pro I/O-Pin |
20 mA |
Gleichstrom für 3,3V-Pin |
50 mA |
Flash-Speicher |
32 KB (ATmega328P-PU), davon 0,5 KB vom Bootloader genutzt |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Taktfrequenz |
16 MHz |
Onboard-LED |
D13 |
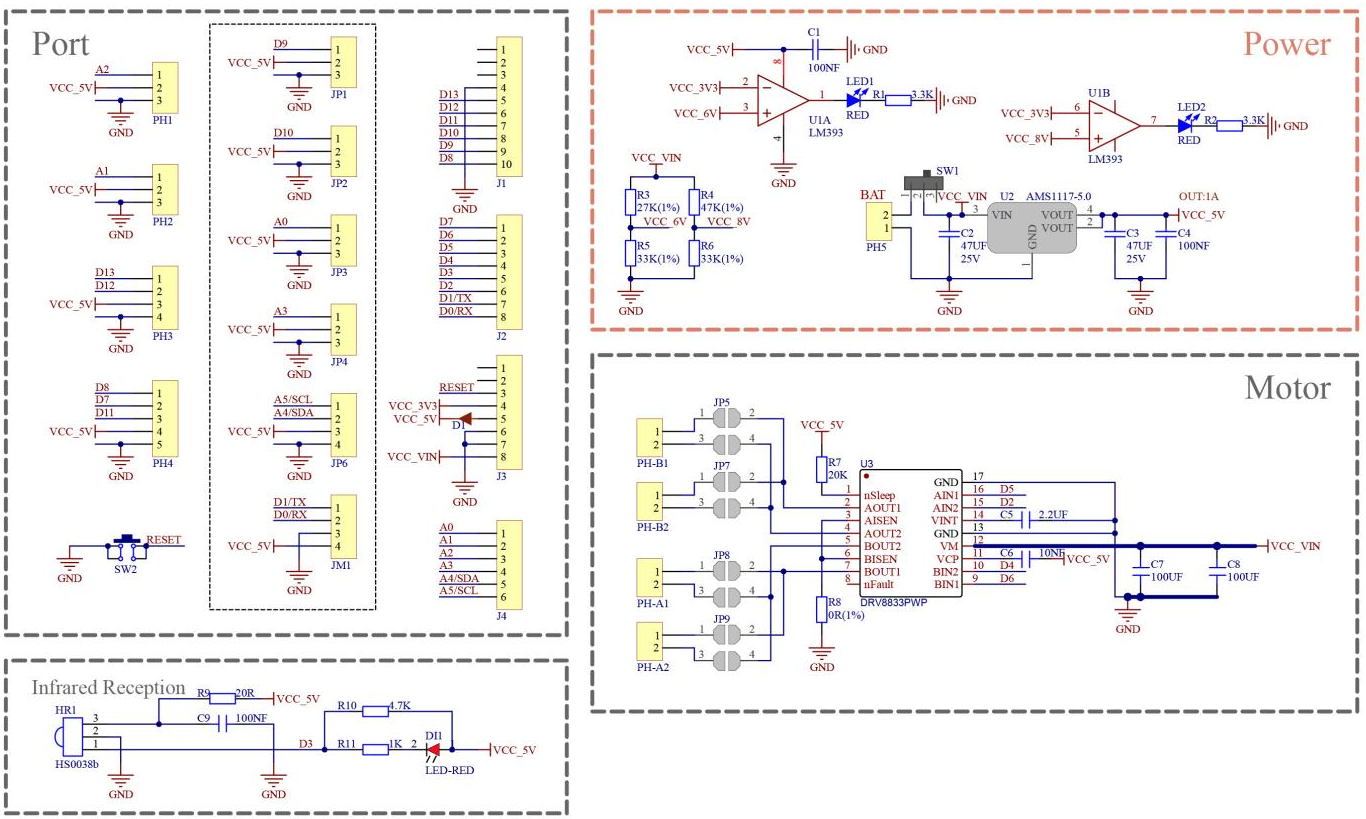
1.6 Motor Shield
Beschreibung:
Das 8833 Board verwendet den 8833 Motor-Treiberchip, der von zwei Kanal-H-Brücken gesteuert wird. Der maximale Antriebsstrom eines einzelnen Kanals beträgt bis zu 1,5A, und der Anschluss PH2.0 wird verwendet.
Das IR-Empfängermodul ist ebenfalls auf dem Board integriert. Darüber hinaus gibt es viele PH2.0 Erweiterungsschnittstellen auf dem Board, wie Ultraschallschnittstelle, analoge Schnittstelle, dreikanalige Tracking-Schnittstelle sowie Pin-Schnittstellen für Bluetooth und Motorsteuerung.
Spezifikation:
Spannung |
USB 5V, DC 6-9V |
|---|---|
Strom |
Maximaler Ausgang 3A, tatsächlicher Ausgang ca. 1A (2A bei Motorlast) |
Maximale Leistung |
27W (tatsächlicher Wert ca. 9W) |
Arbeitstemperatur |
-10~50 Grad Celsius |
Abmessungen |
69x56x18mm |
Gewicht |
25,5g |
Umweltschutzattribute |
ROHS |
Funktion:
Schaltplan: