2 Zusammenbau
Teil 1
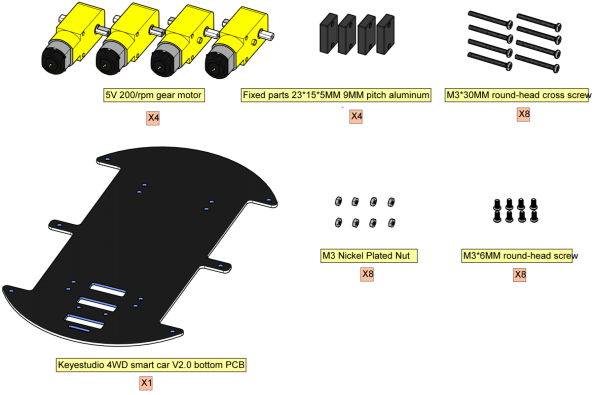
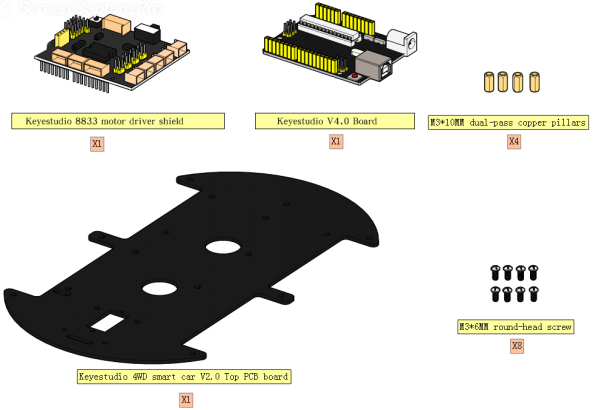
1.1. Benötigte Komponenten.
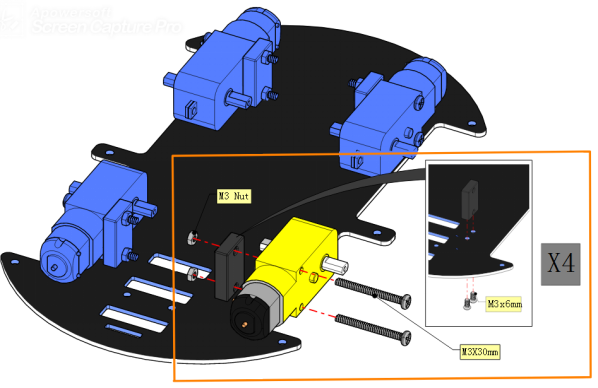
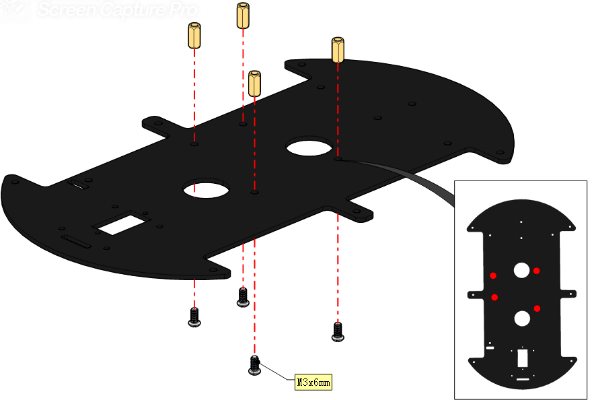
1.2. Installationsdiagramm.
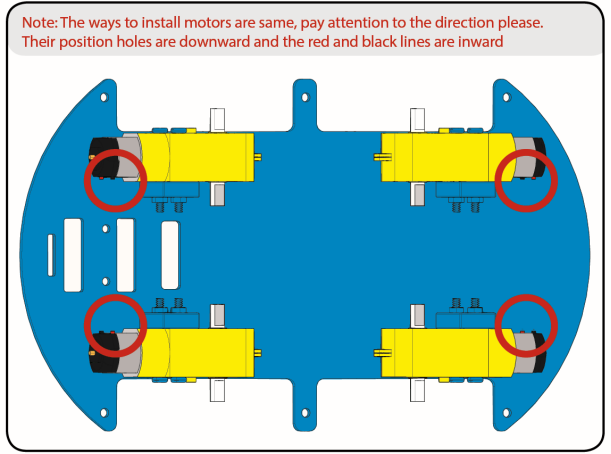
1.3. Prototyp.
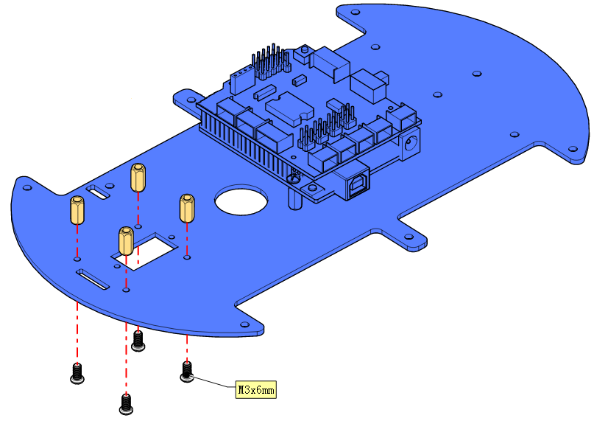
Teil 2
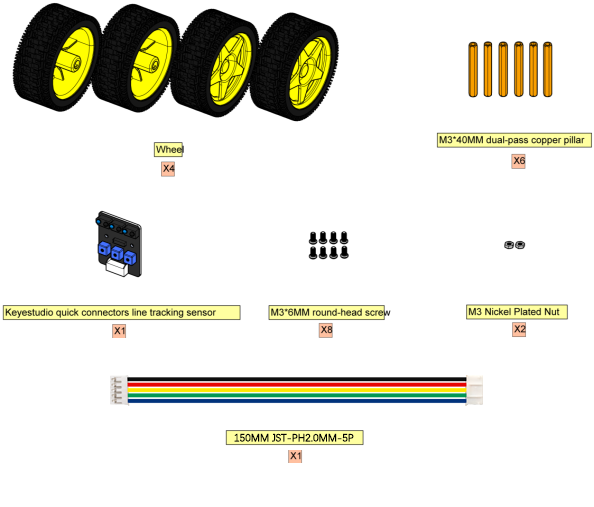
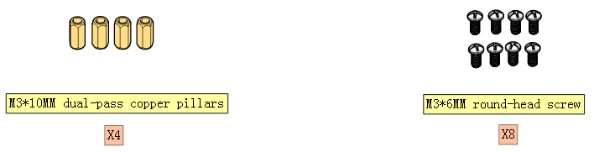
2.1. Benötigte Komponenten.
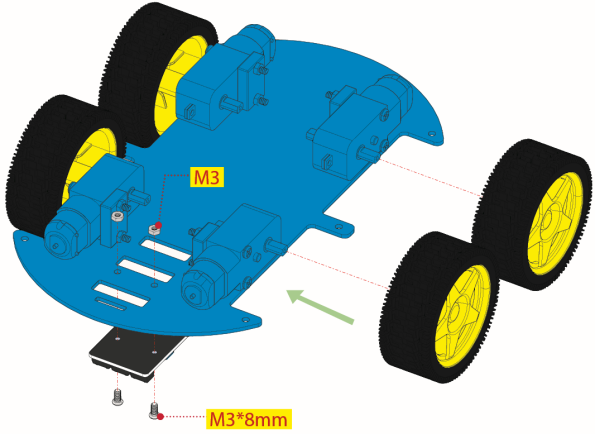
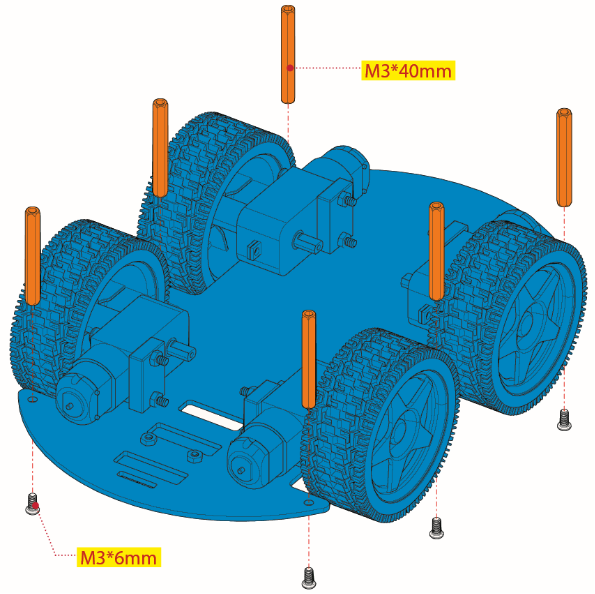
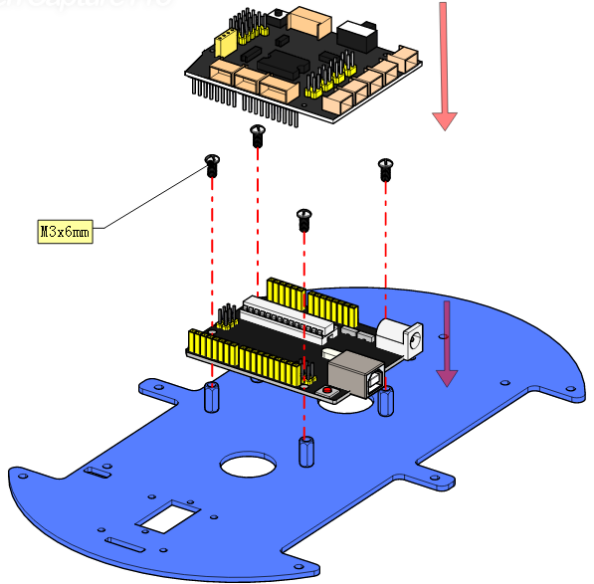
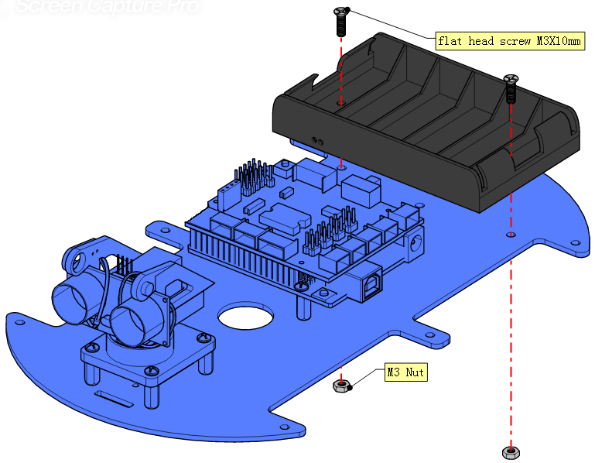
2.2. Installationsdiagramm.
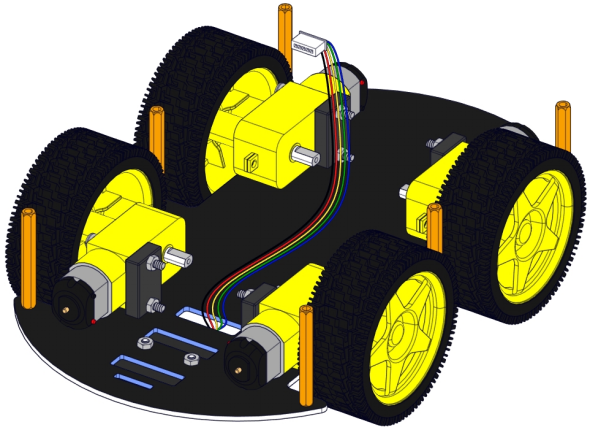
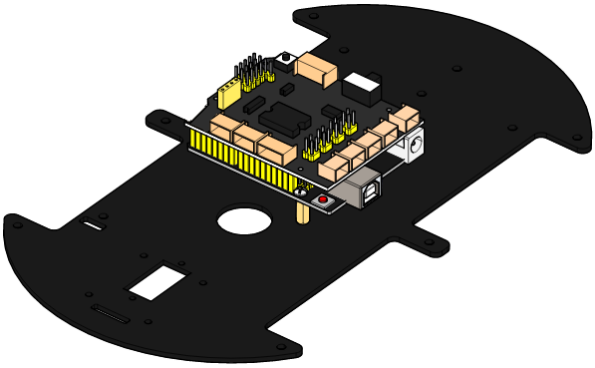
2.3. Prototyp.
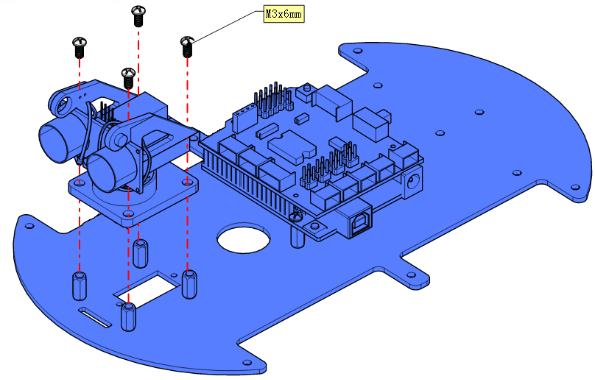
Teil 3
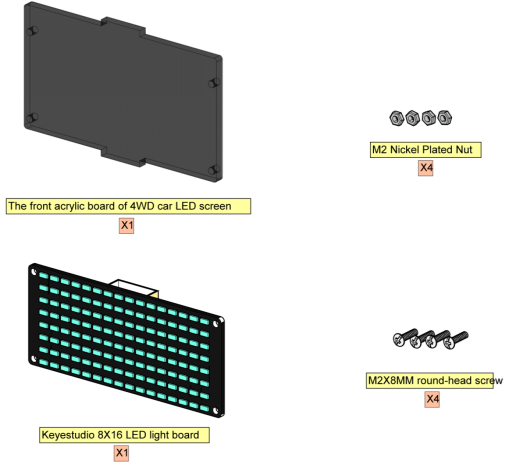
3.1. Benötigte Komponenten.

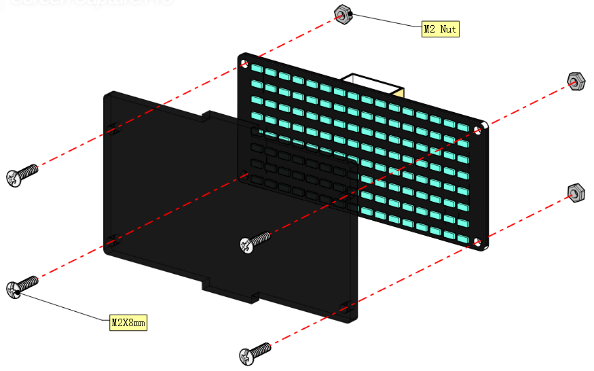
3.2. Installationsdiagramm.
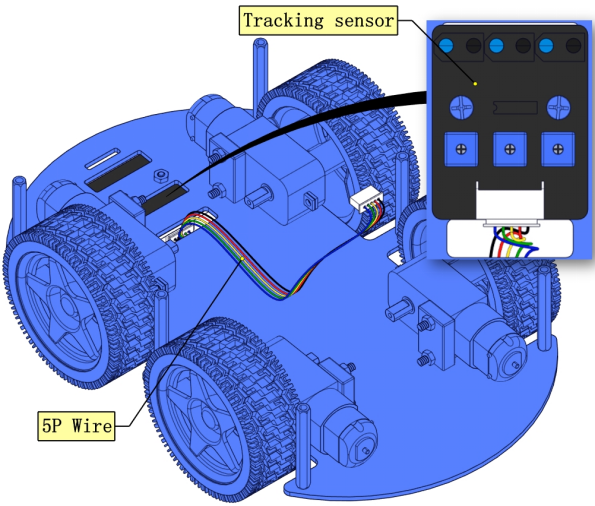
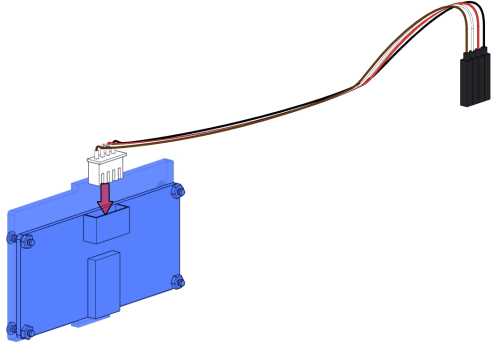
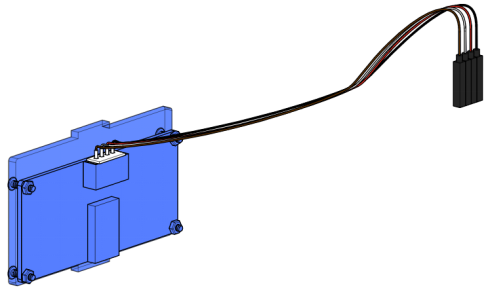
3.3. Kabel anschließen.
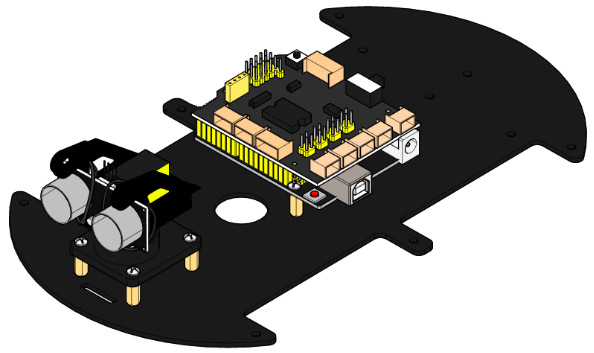
3.4. Prototyp.
Teil 4
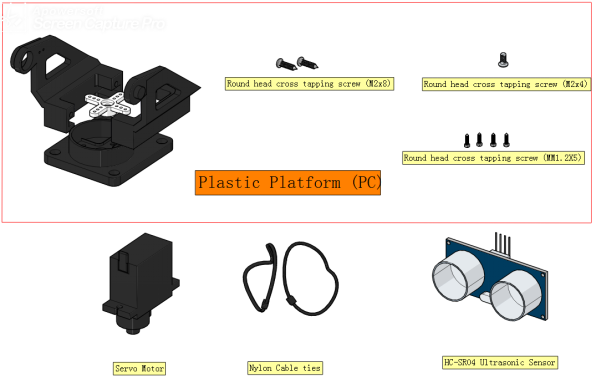
4.1. Benötigte Komponenten.
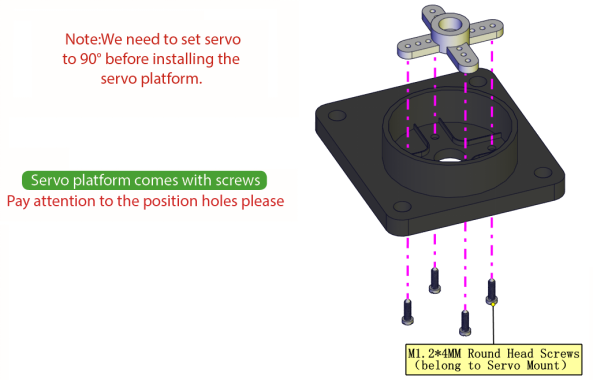
4.2. Drehen Sie den Servo auf 90 Grad.
Um den Code des Servos anzupassen, wählen Sie bitte entsprechend dem Kurs aus.
1.Arduino: Laden Sie die Code-Datei herunter: Arduino
2.Kidsblock: Laden Sie die Code-Datei herunter: Kidsblock

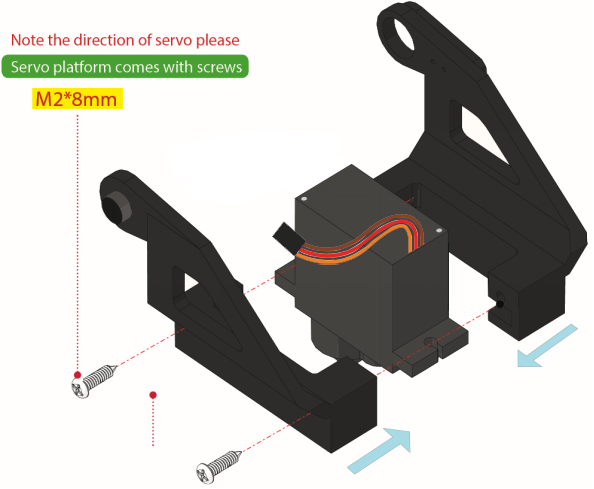
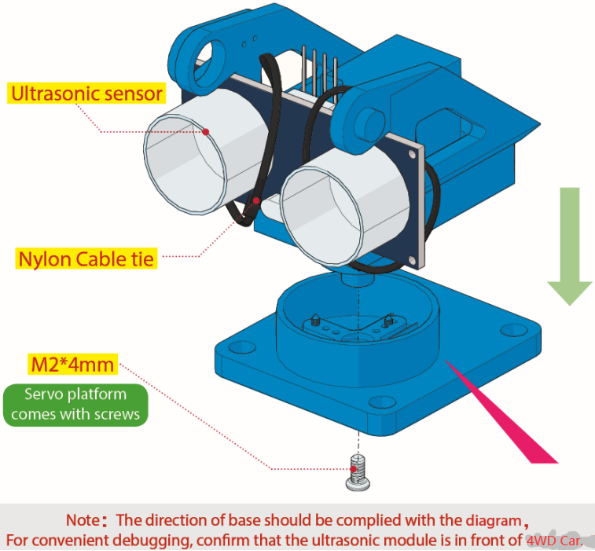
4.3. Installationsdiagramm.
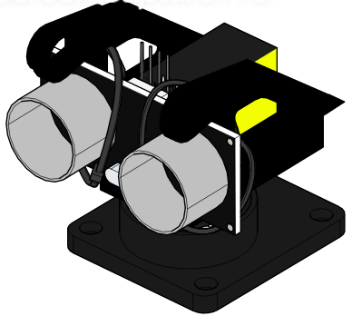
4.4. Prototyp.
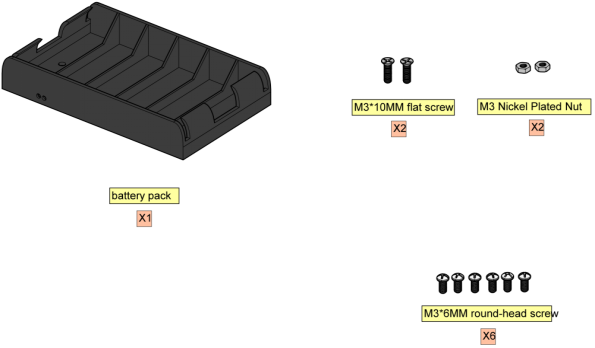
Teil 5
5.1. Benötigte Komponenten.
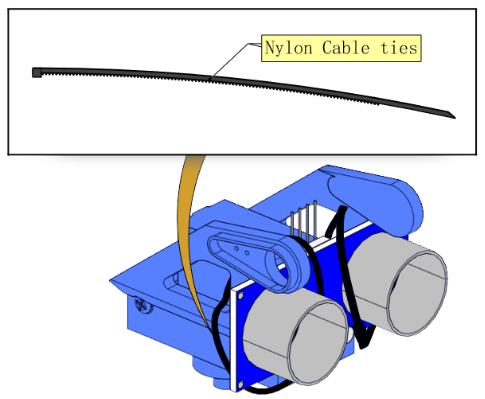
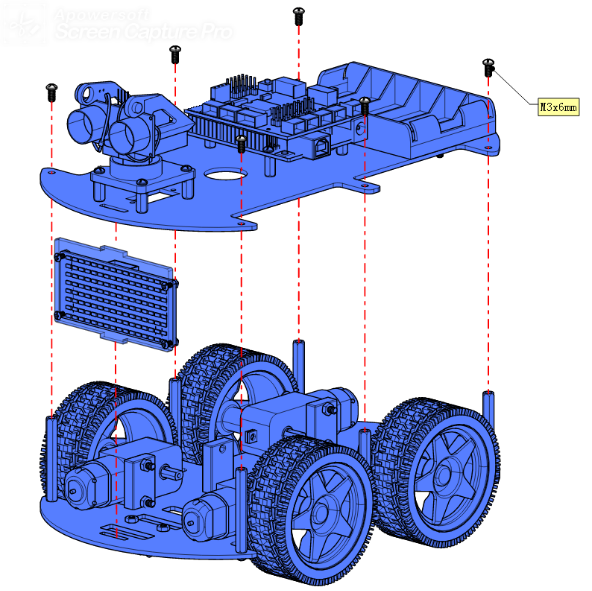
5.2. Installationsdiagramm.
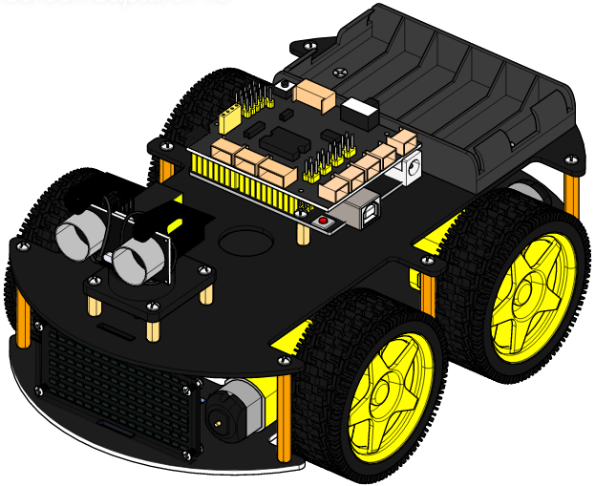
5.3. Prototyp.
Teil 6
6.1. Benötigte Komponenten.
6.2. Installationsdiagramm.
6.3. Prototyp.
Teil 7
7.1. Benötigte Komponenten.
7.2. Installationsdiagramm.
7.3. Prototyp.
Teil 8
8.1. Verdrahtungsdiagramm.
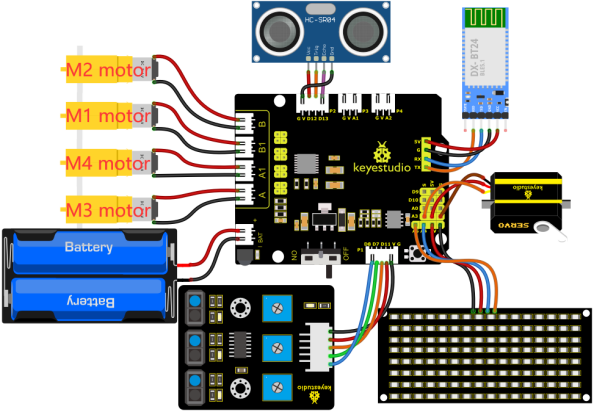
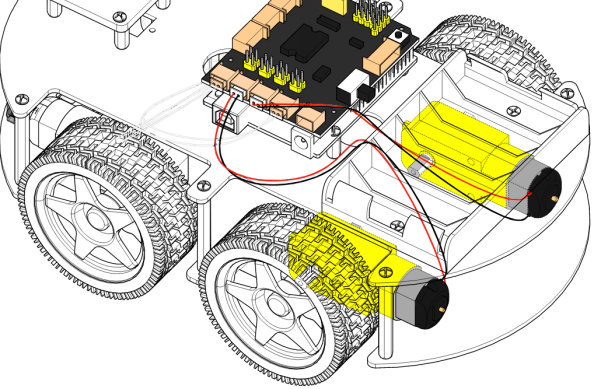
8.2. M2 Motor ist mit Schnittstelle B verbunden, M3 Motor ist mit Schnittstelle A verbunden.
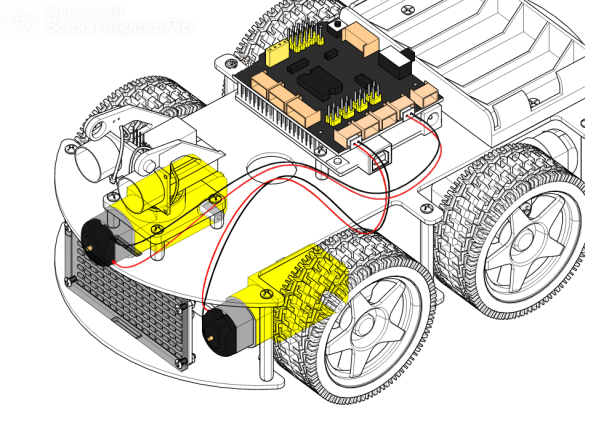
8.3. M1 Motor ist mit Schnittstelle B1 verbunden, M4 Motor ist mit Schnittstelle A1 verbunden.
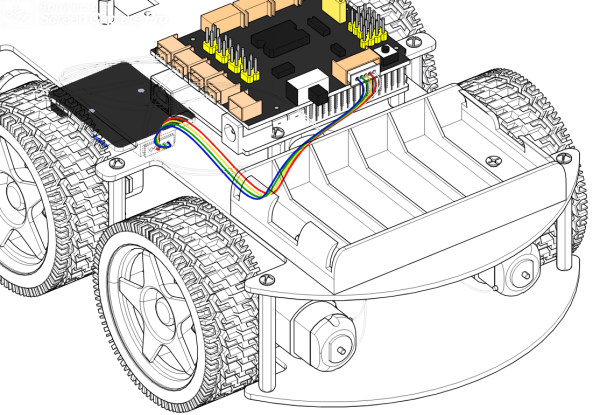
8.4. Die Verdrahtung des 3-Kanal Linienverfolgungssensors.
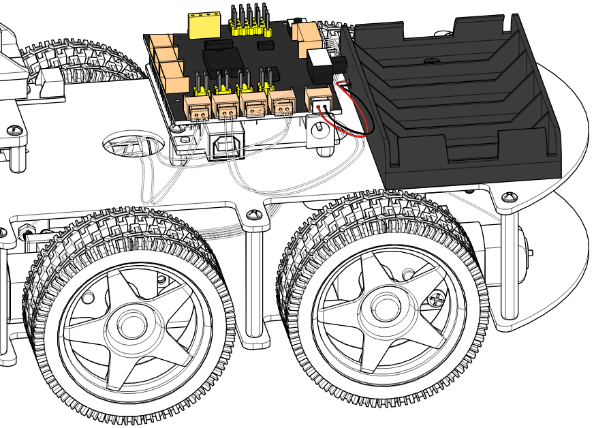
8.5. Die Stromversorgung ist mit BAT verbunden.
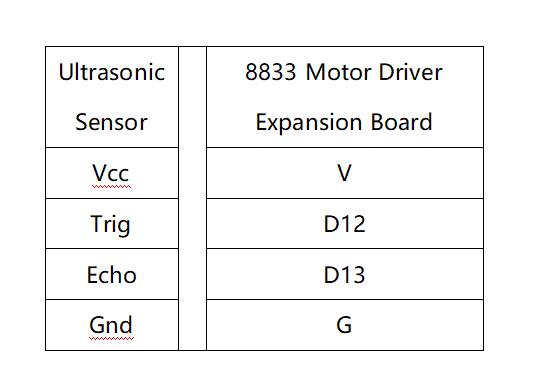
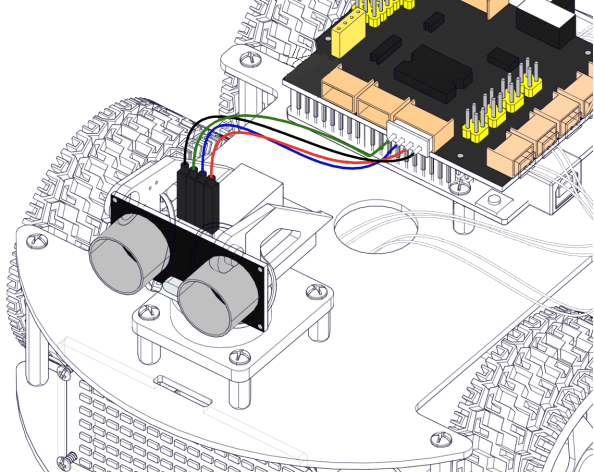
8.6. Die Verdrahtung des Ultraschallsensors.
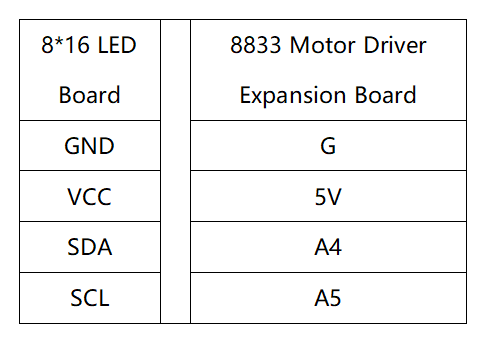
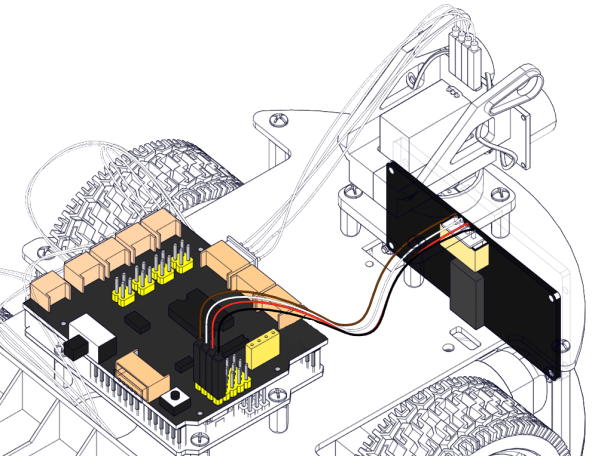
8.7. Die Verdrahtung der 8*16 LED-Anzeige.
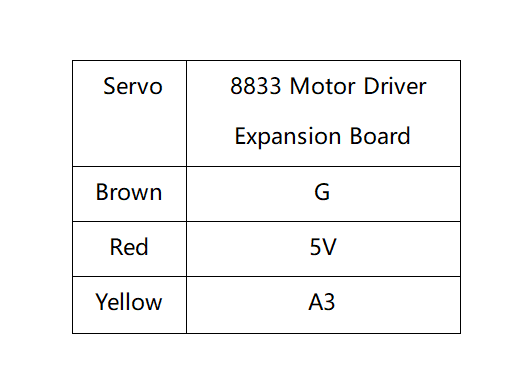
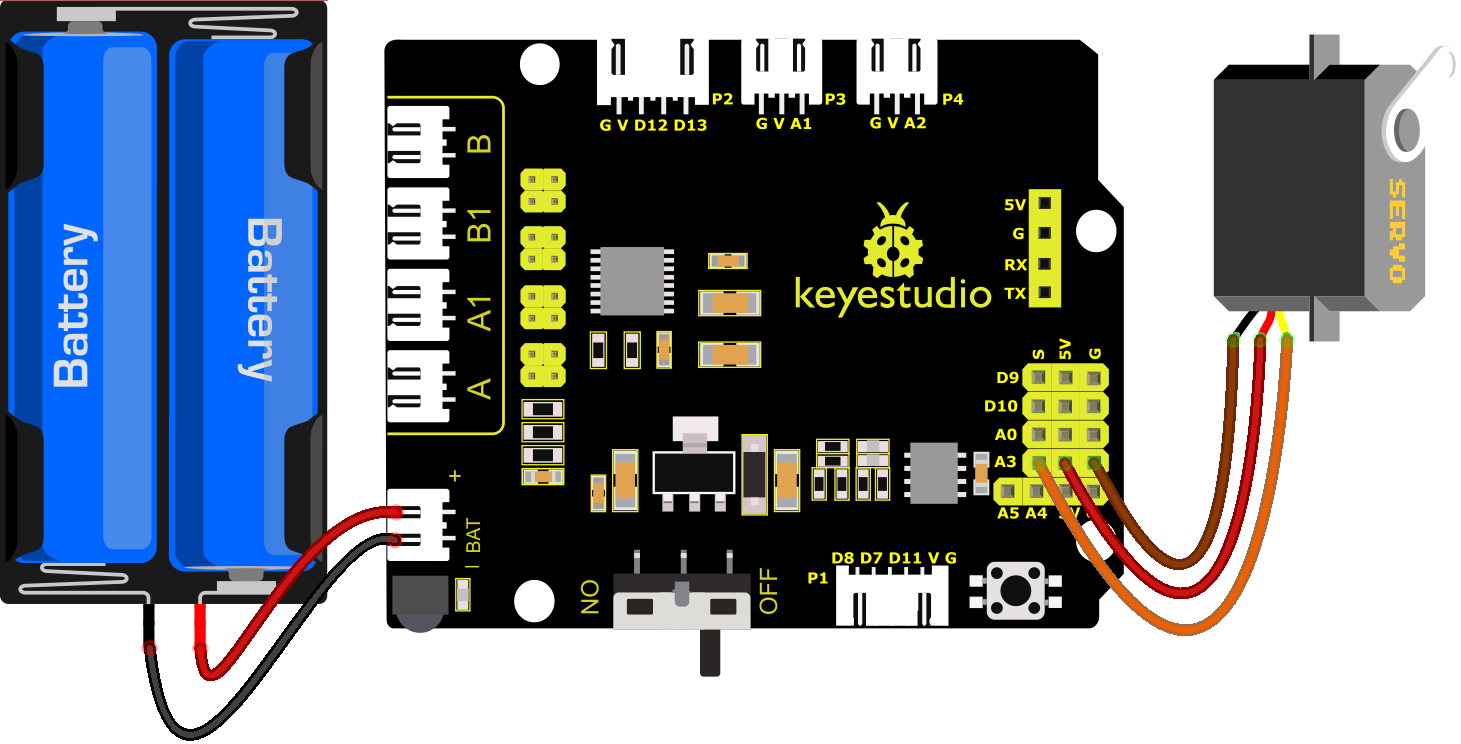
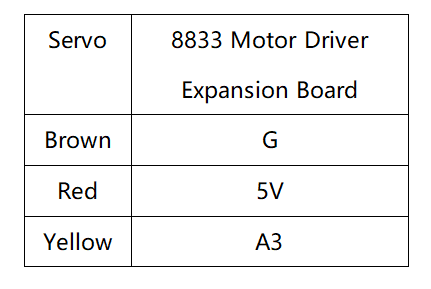
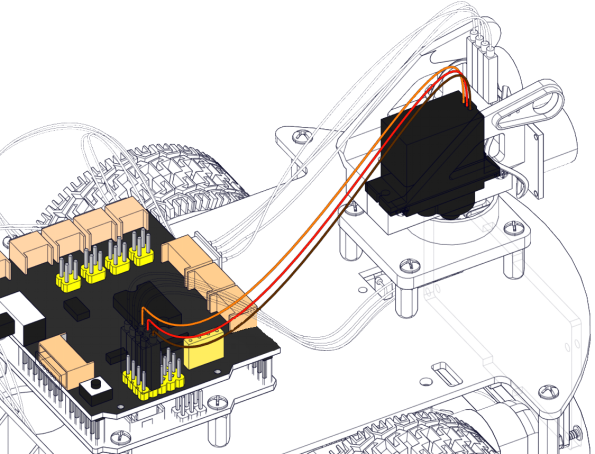
8.8. Die Verdrahtung des Servos.
8.9. Stecken Sie das Bluetooth-Modul und die Jumper-Kappen ein.
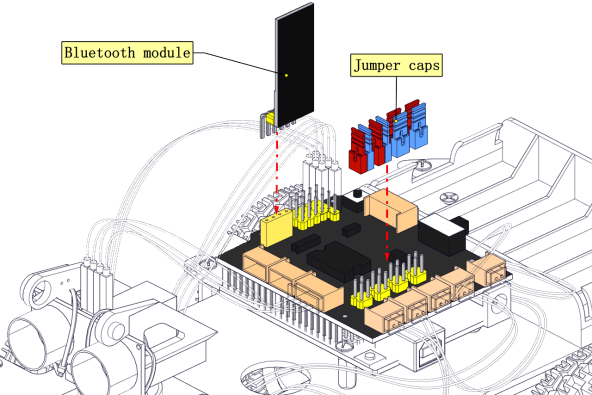
Hinweis: Vor dem Hochladen des Testcodes müssen Sie das Bluetooth-Modul entfernen, da sonst der Code nicht hochgeladen werden kann. Verbinden Sie das Bluetooth-Modul erst nach erfolgreichem Hochladen des Codes.
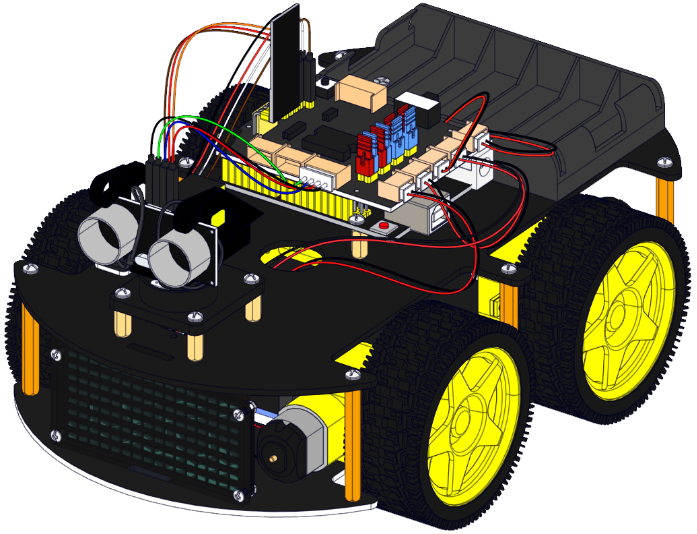
8.10. Fertiger Prototyp.