1. Comenzando con el robot 4WD
1.1 Introducción
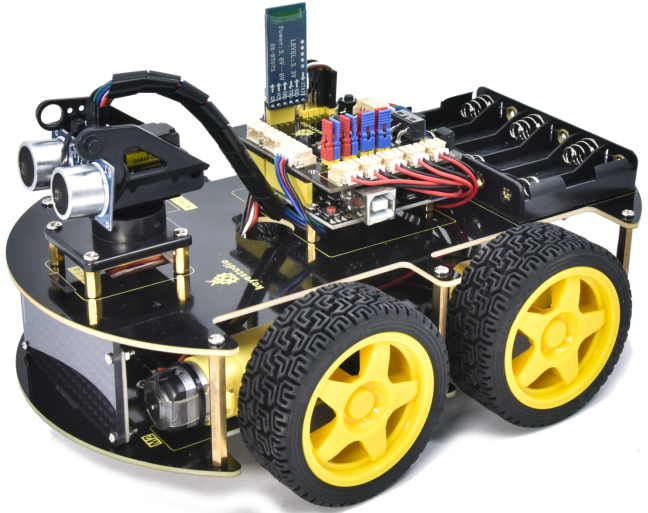
El coche multipropósito 4WD recién actualizado es uno de los sets de Arduino más populares. No solo tiene una apariencia atractiva, sino también funciones potentes. Además de las funciones habituales de seguimiento de línea, evitación de obstáculos y control remoto, también utiliza expresiones faciales para mostrar expresiones adorables. Además, te permite expandir tus propios proyectos o añadir otros sensores para completar tu exploración.
La mayoría de los componentes están conectados mediante tornillos y pilares de cobre, por lo que puedes construir tu propio robot a través de unos pocos pasos simples de ensamblaje.
Además, el conocimiento básico como el seguimiento de línea, sensores de evitación de obstáculos, medición ultrasónica, comunicación Bluetooth, controladores de motor así como controles remotos IR están disponibles para que los aprendamos.
Este producto cuenta con 17 proyectos de aprendizaje, desde simples hasta complejos, que te guiarán para crear un robot Arduino.
1.2 Lista del kit
# |
Nombre |
Cantidad |
Imagen |
|---|---|---|---|
1 |
Placa Keyestudio V4.0 (compatible UNO) |
1 |
|
2 |
Placa de expansión del controlador de motor Keyestudio |
1 |
|
3 |
Módulo Bluetooth |
1 |
|
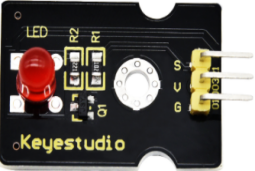
4 |
Módulo LED rojo |
1 |
|
5 |
Sensor ultrasónico |
1 |
|
6 |
Sensor de seguimiento de línea Keyestudio |
1 |
|
7 |
Placa LED 8*16 Keyestudio (cable de conexión de 4 pines) |
1 |
|
8 |
Servo |
1 |
|
9 |
Control remoto IR |
1 |
|
10 |
Cable USB |
1 |
|
11 |
Portapilas 18650 |
1 |
|
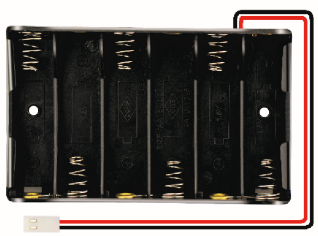
12 |
Portapilas para 6 pilas AA |
1 |
|
13 |
Cabezal de soporte |
1 |
|
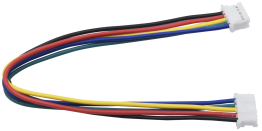
14 |
Cable JST-PH2.0MM-5P 24AWG de 150MM |
1 |
|
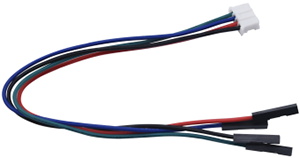
15 |
Cable PH2.0mm-4P a Dupont 2.54 de 150MM |
1 |
|
16 |
Placa acrílica |
1 |
|
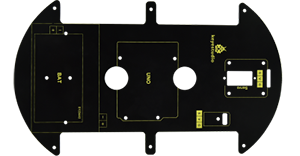
17 |
Placa superior Keyestudio |
1 |
|
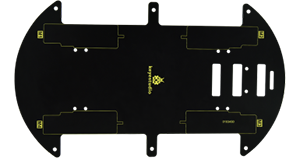
18 |
Placa base Keyestudio |
1 |
|
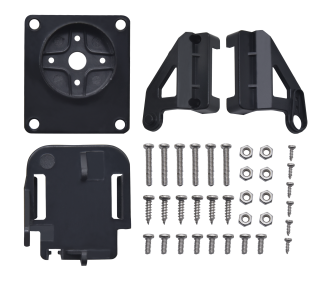
19 |
Piezas de fijación |
4 |
|
20 |
Ruedas |
4 |
|
21 |
Pilar de cobre pasante doble M3*10MM |
10 |
|
22 |
Pilar de cobre pasante doble M3*40MM |
4 |
|
23 |
Tornillo de cabeza redonda M3*30MM |
8 |
|
24 |
Tornillo de cabeza redonda M3*6MM |
40 |
|
25 |
Tuerca niquelada M3 |
16 |
|
26 |
Tornillo de cabeza redonda M2*8MM |
6 |
|
27 |
Tornillo de cabeza redonda M3*8MM |
4 |
|
28 |
Tuerca niquelada M2 |
6 |
|
29 |
Tornillo de cabeza plana M3*10MM |
3 |
|
30 |
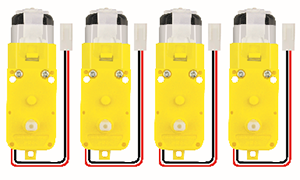
Motor |
4 |
|
31 |
Destornillador |
1 |
|
32 |
Bridas negras |
6 |
|
33 |
Tubo para enrollar |
1 |
|
34 |
Cable Dupont 3 pines F-F de 20CM |
1 |
|
35 |
Tarjeta decorativa |
1 |
|
36 |
Capuchón jumper azul |
4 |
|
37 |
Capuchón jumper rojo |
4 |
|
38 |
Pista de seguimiento |
1 |
|


























1.3 Características
Función multipropósito: Evitación de obstáculos, seguimiento, control remoto por IR, control Bluetooth, confinamiento en un círculo, control por gravedad, así como visualización de emoticonos faciales.
Montaje sencillo: No requiere soldadura de circuitos, montaje simple.
Construcción robusta: Construcción 4WD, 4 motores y ruedas premium.
Alta expansión: Puede ampliar otros sensores y módulos mediante una placa de expansión para controlador de motor.
Múltiples controles: Control remoto por IR, control por App (sistemas iOS y Android).
Programación básica: Código en lenguaje C para Arduino IDE.
1.4 Especificaciones
Voltaje de trabajo: 5V
Voltaje de entrada: 6-9V
Corriente máxima de salida: 2A
Disipación máxima de potencia: 25W (T=75℃)
Velocidad del motor: 5V 200 rpm
Modo de conducción del motor: controlador de motor DRV8833
Ángulo de inducción ultrasónica: <15 grados
Distancia de detección ultrasónica: 2cm-400cm
Distancia de control remoto por infrarrojos: 10M (medido)
Distancia de control remoto Bluetooth: 50M (medido)
Control Bluetooth: compatible con sistemas Android e iOS
1.5 Placa de desarrollo
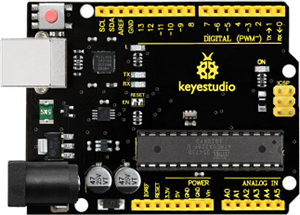
Debe saber que la placa de desarrollo keyestudio V4.0 es el núcleo de este 4WD BT Multi-purpose Car V2.0.
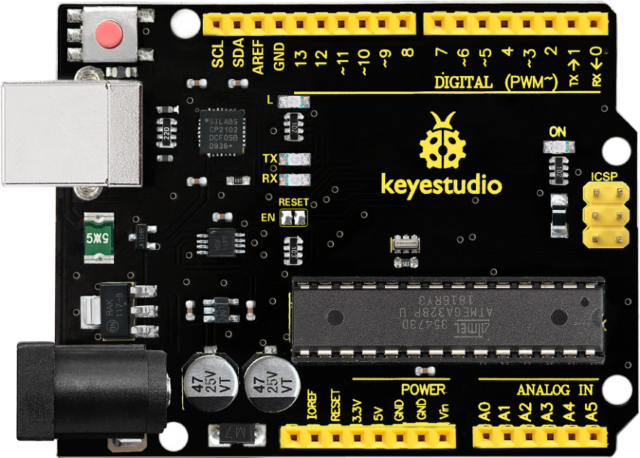
La placa de desarrollo keyestudio V4.0 es una placa compatible con Arduino Uno, basada en el MCU ATmega328P, y con un chip CP2102 como convertidor UART a USB.
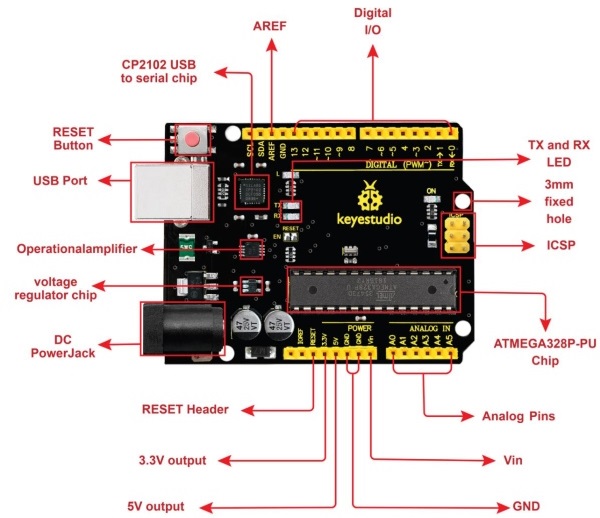
Cuenta con 14 pines digitales de entrada/salida (de los cuales 6 pueden usarse como salidas PWM), 6 entradas analógicas, un cristal de cuarzo de 16 MHz, una conexión USB, un conector de alimentación, 2 encabezados ICSP y un botón de reinicio.
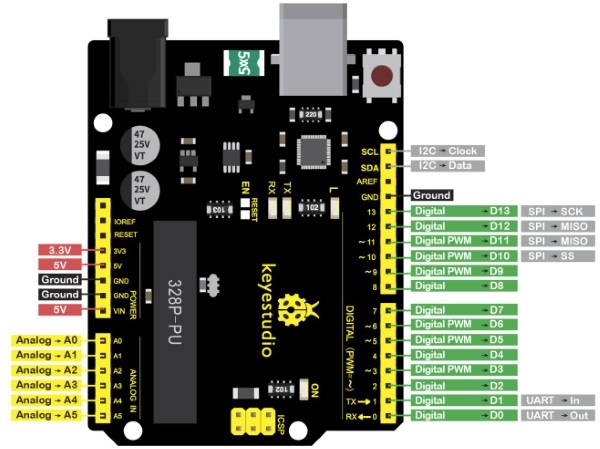
Contiene todo lo necesario para soportar el microcontrolador: simplemente conéctelo a un ordenador con un cable USB o aliméntelo mediante un conector de alimentación DC externo (DC 7-12V) o a través de los pines hembra Vin/GND (DC 7-12V) para comenzar.
Microcontrolador |
ATmega328P-PU |
|---|---|
Voltaje de operación |
5V |
Voltaje de entrada (recomendado) |
DC 7-12V |
Pines digitales I/O |
14 (D0-D13) (de los cuales 6 proporcionan salida PWM) |
Pines digitales PWM I/O |
6 (D3, D5, D6, D9, D10, D11) |
Pines de entrada analógica |
6 (A0-A5) |
Corriente DC por pin I/O |
20 mA |
Corriente DC para pin 3.3V |
50 mA |
Memoria Flash |
32 KB (ATmega328P-PU) de los cuales 0.5 KB son usados por el bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Velocidad de reloj |
16 MHz |
LED a bordo |
D13 |
1.6 Motor shield
Descripción:
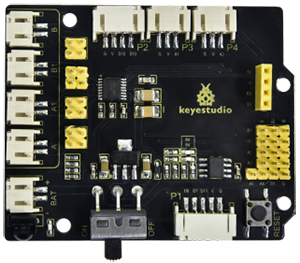
La placa 8833 adopta el chip controlador de motor 8833 impulsado por puentes H de dos canales, y la corriente máxima de conducción de un solo canal es de hasta 1.5A, utilizando el terminal PH2.0.
El módulo receptor IR también está integrado en la placa. Además, hay muchas interfaces de expansión PH2.0 en la placa, tales como interfaz ultrasónica, interfaz analógica, interfaz de seguimiento de tres canales, así como interfaces de pines con Bluetooth y controlador de motor.
Especificaciones:
Voltaje |
USB 5V, DC 6-9V |
|---|---|
Corriente |
La salida máxima es 3A, la salida real es aproximadamente 1A (es 2A cuando el motor está cargado) |
Potencia máxima |
27W (El valor real es aproximadamente 9W) |
Temperatura de trabajo |
-10~50 grados |
Dimensiones |
69x56x18mm |
Peso |
25.5g |
Atributos de protección ambiental |
ROHS |
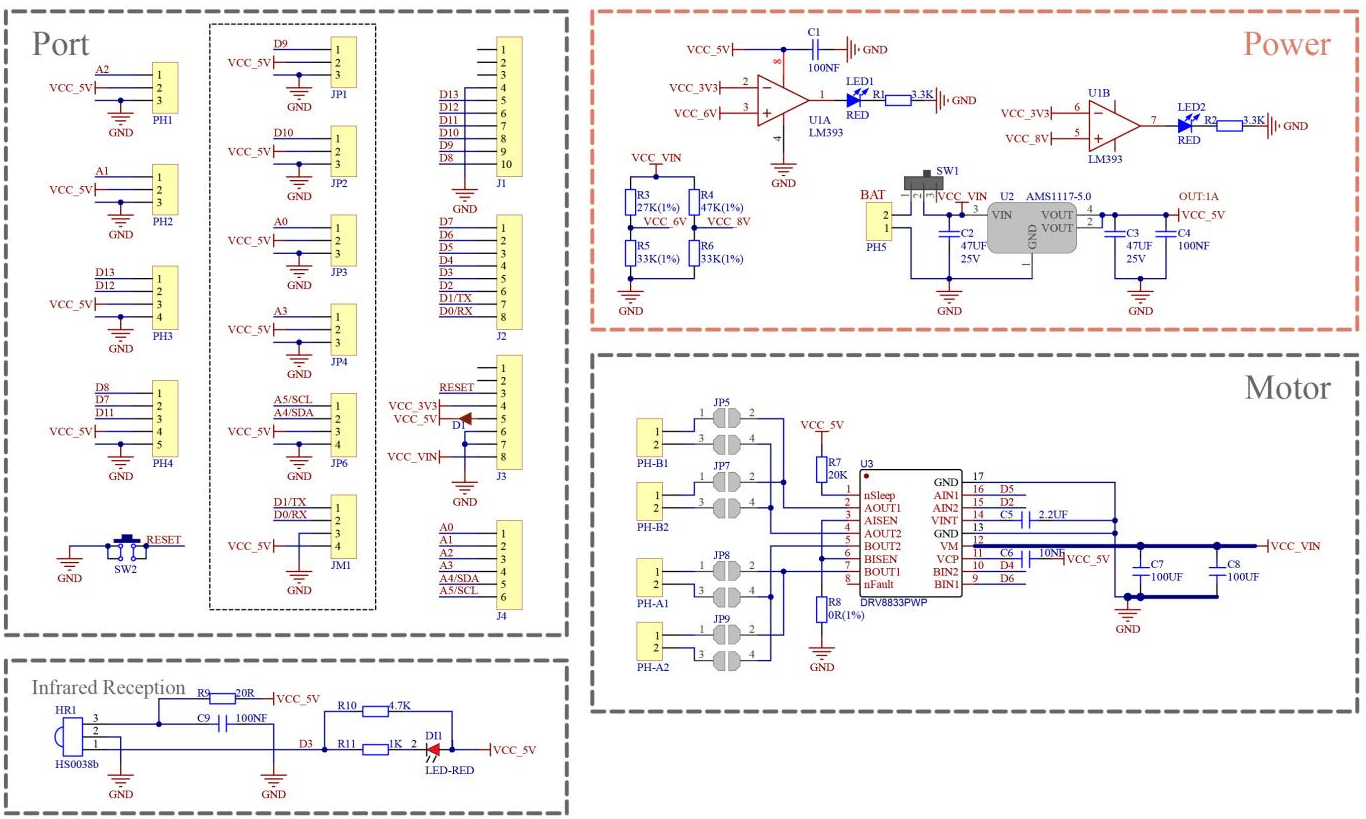
Función:
Diagrama esquemático: