2 Montaje
parte 1
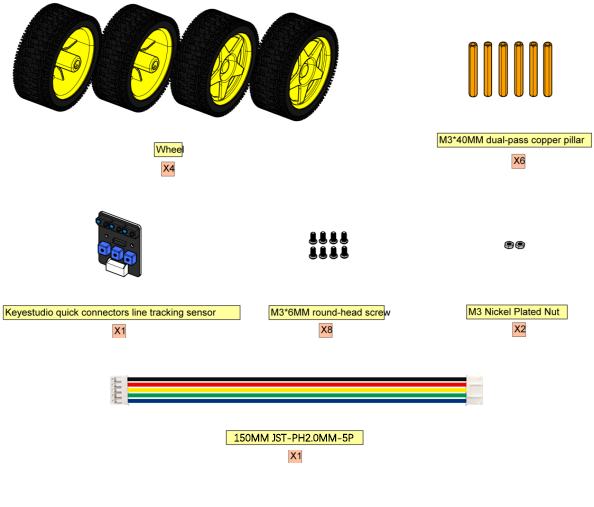
1.1. Componentes necesarios.
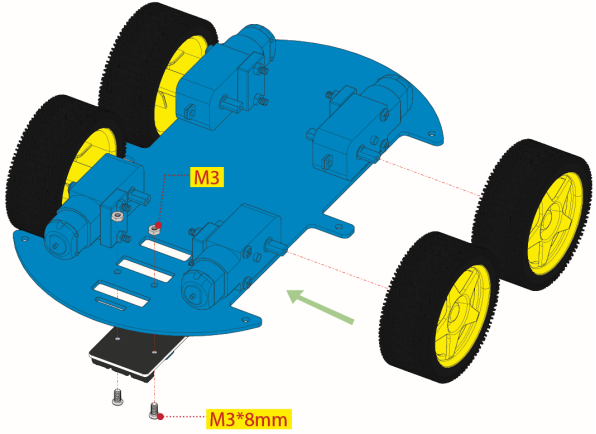
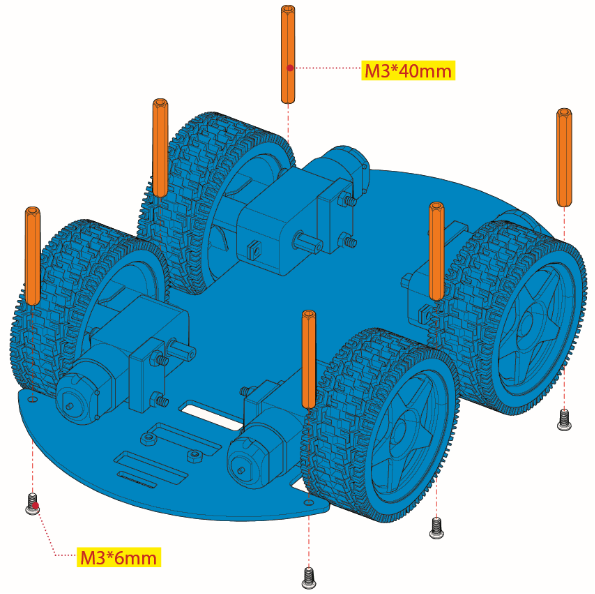
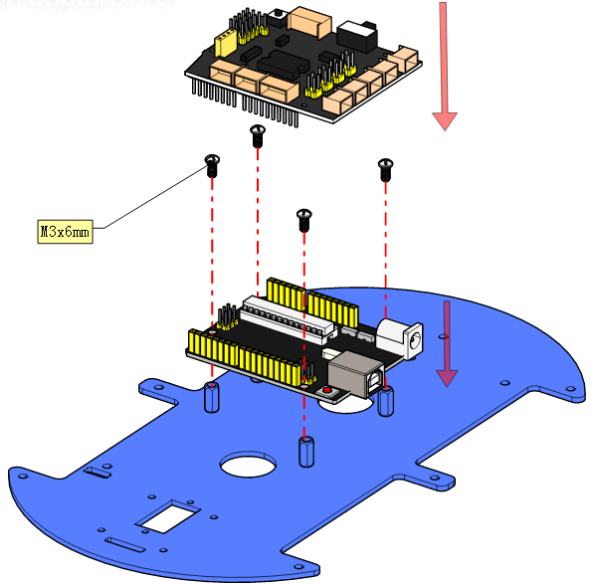
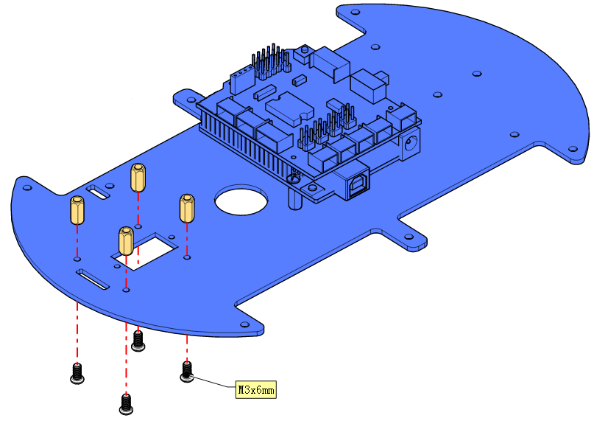
1.2. Diagrama de instalación.
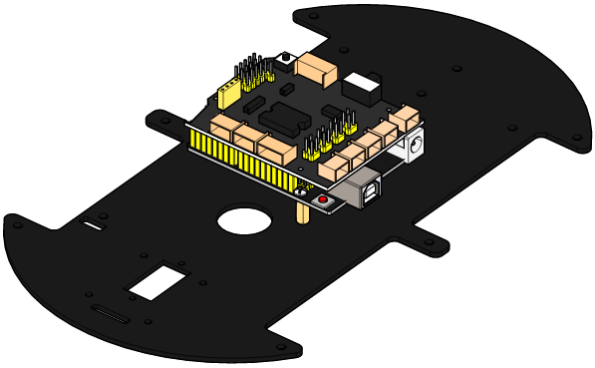
1.3. Prototipo.
parte 2
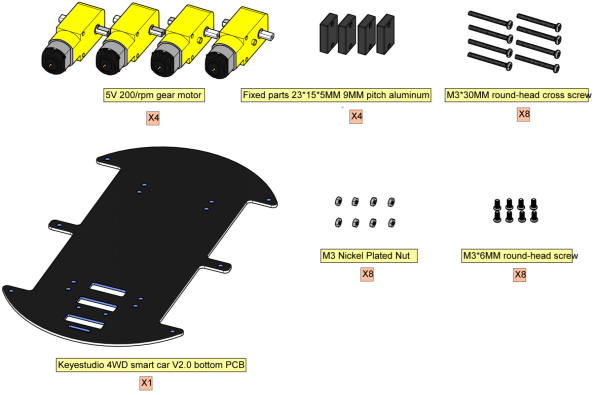
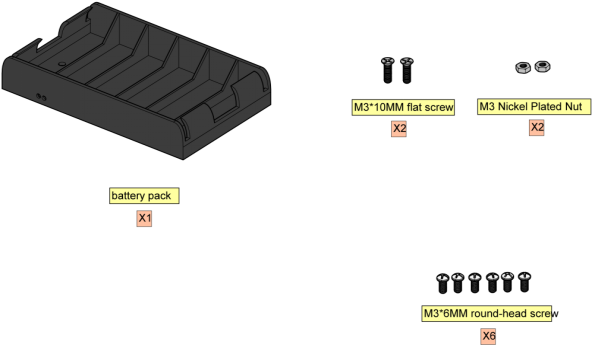
2.1. Componentes necesarios.
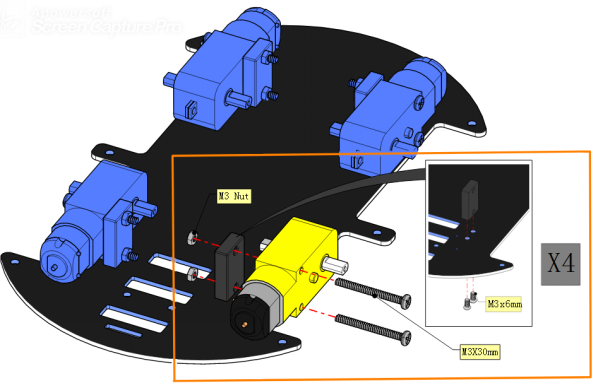
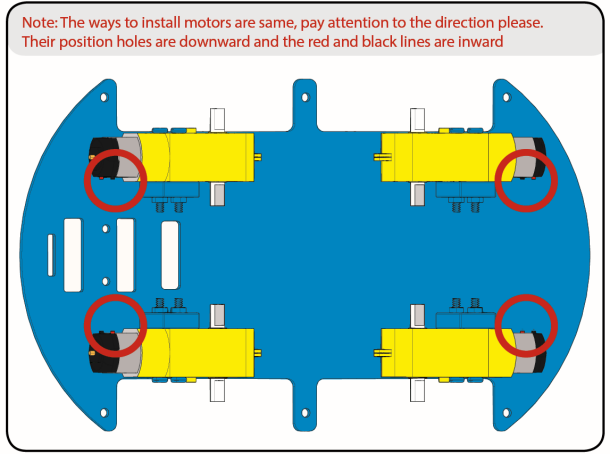
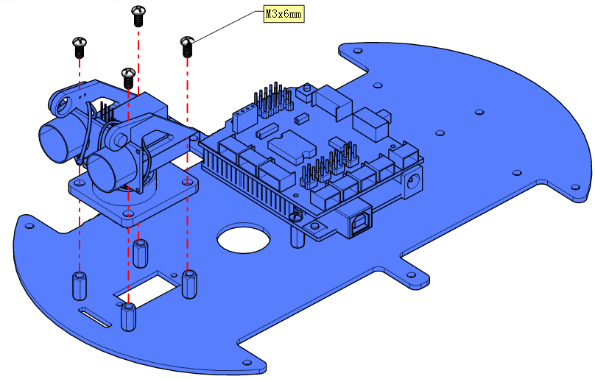
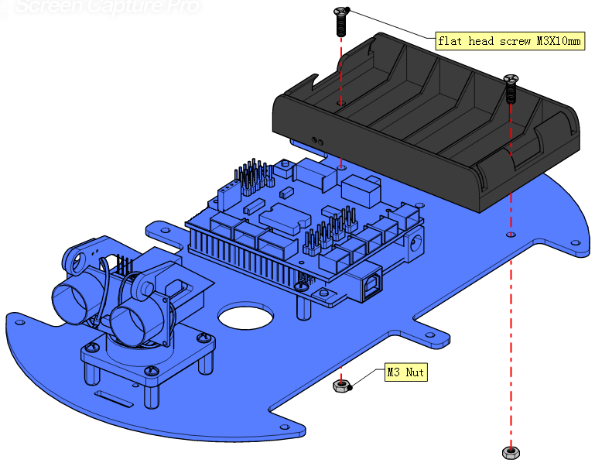
2.2. Diagrama de instalación.
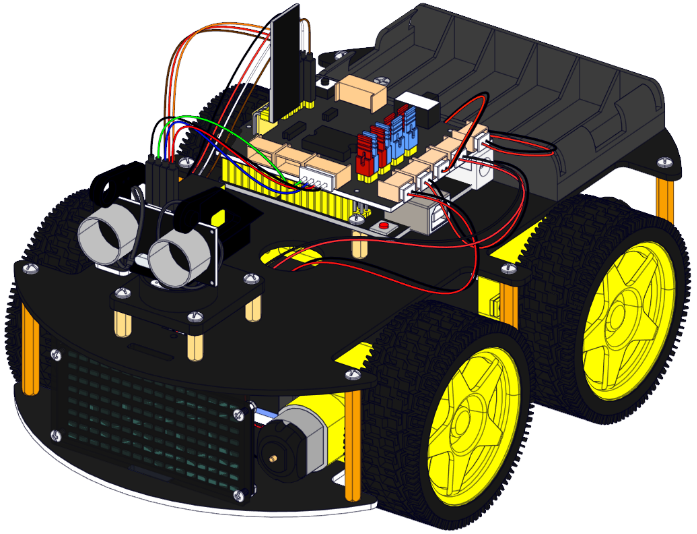
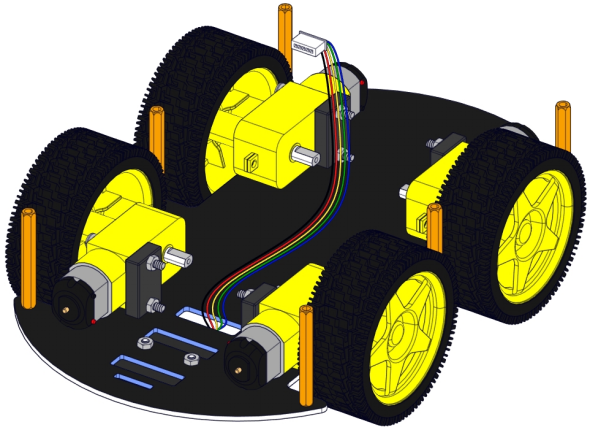
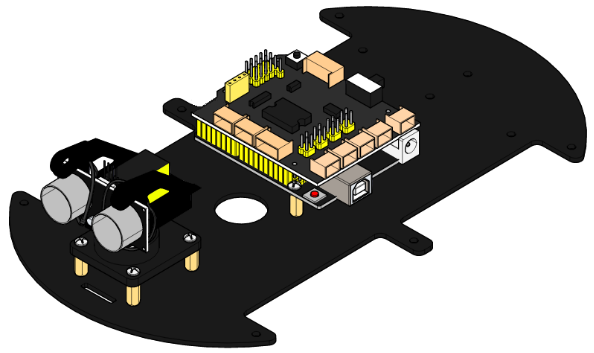
2.3. Prototipo.
parte 3
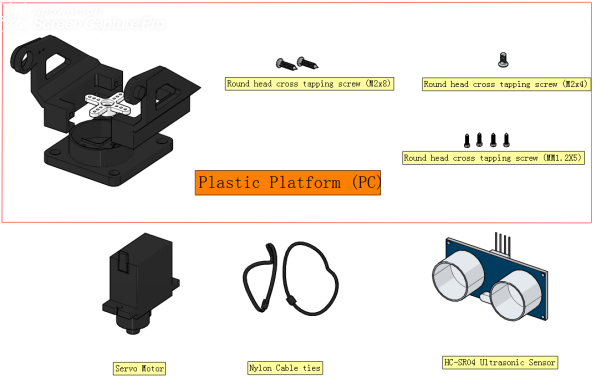
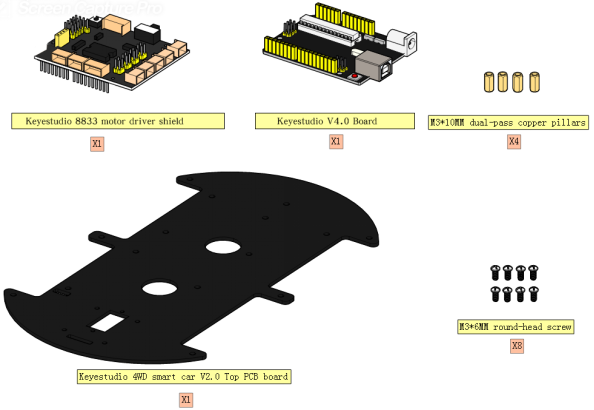
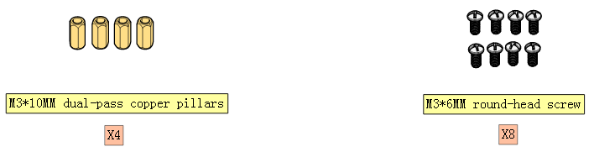
3.1. Componentes necesarios.

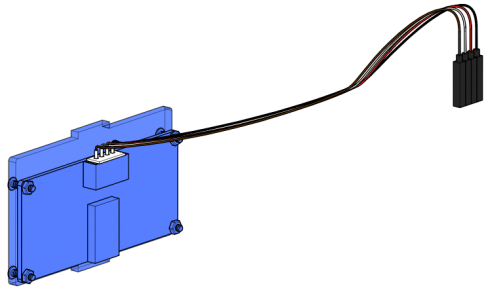
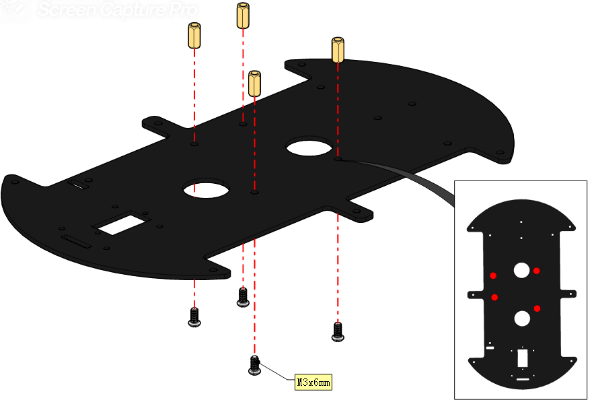
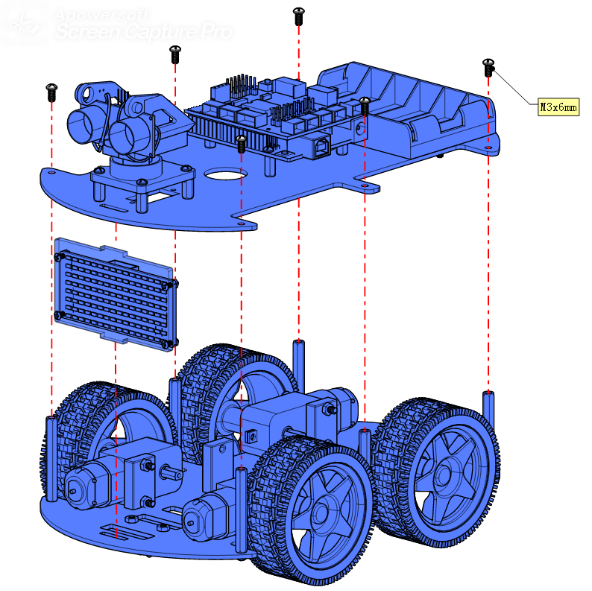
3.2. Diagrama de instalación.
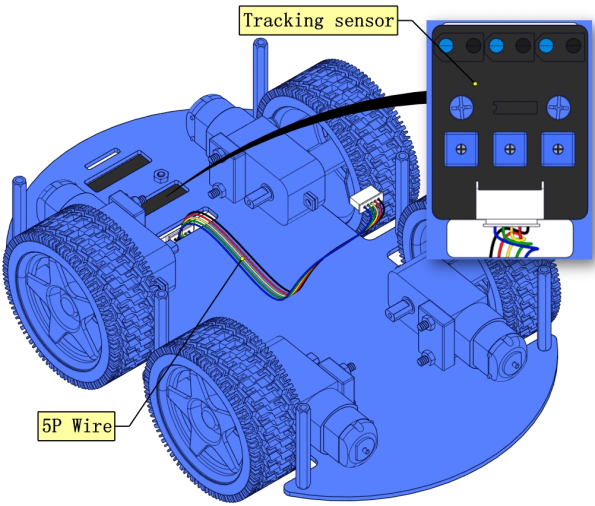
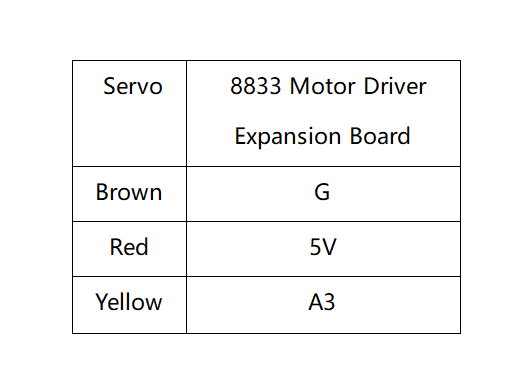
3.3. Conexión de cables.
3.4. Prototipo.
parte 4
4.1. Componentes necesarios.
4.2. Gire el servo a 90 grados.
Para ajustar el código del servo, por favor selecciónelo según el curso.
1.Arduino: Descargue el archivo de código: Arduino
2.Kidsblock: Descargue el archivo de código: Kidsblock

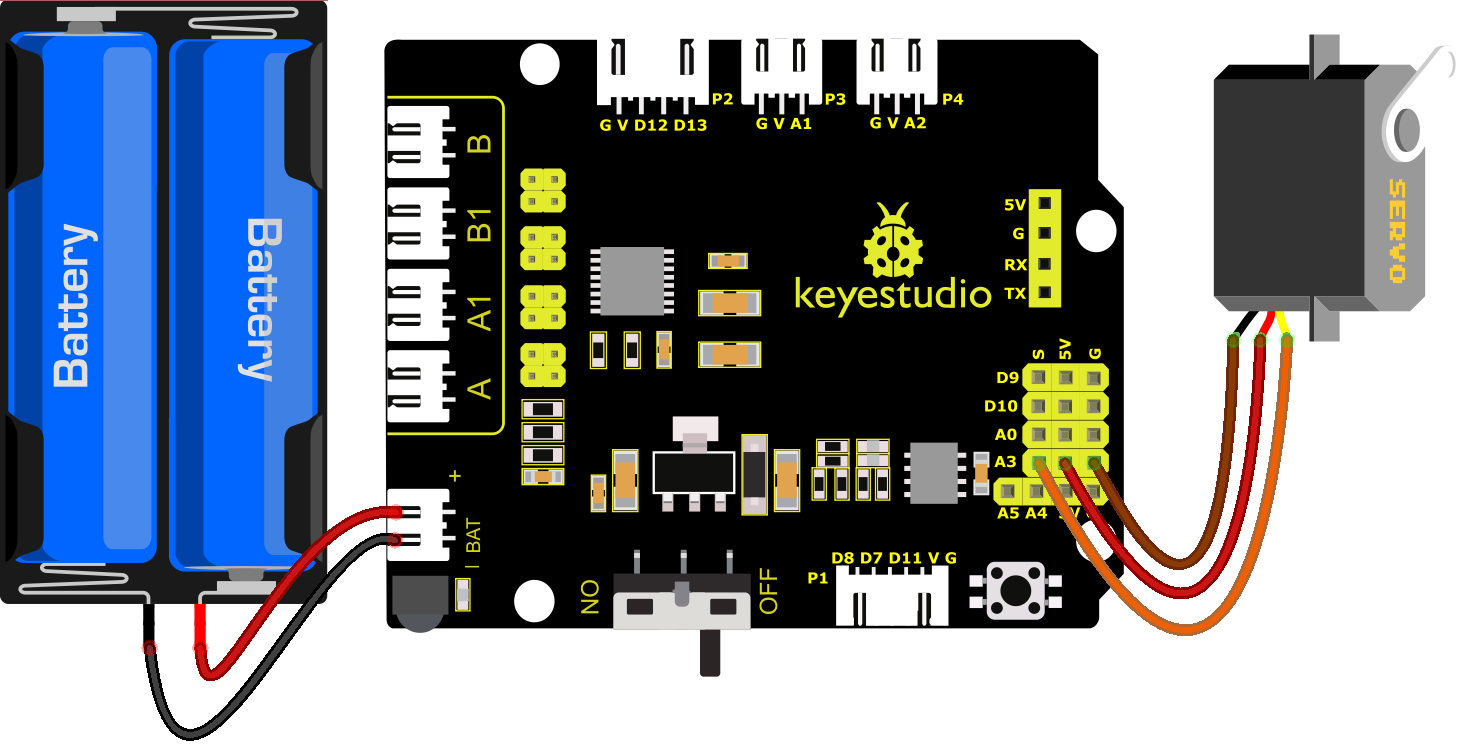
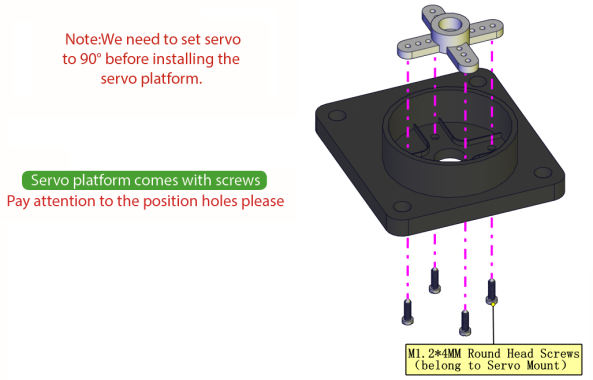
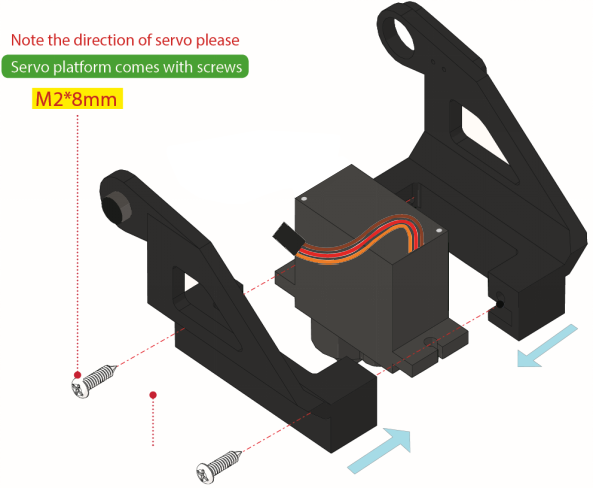
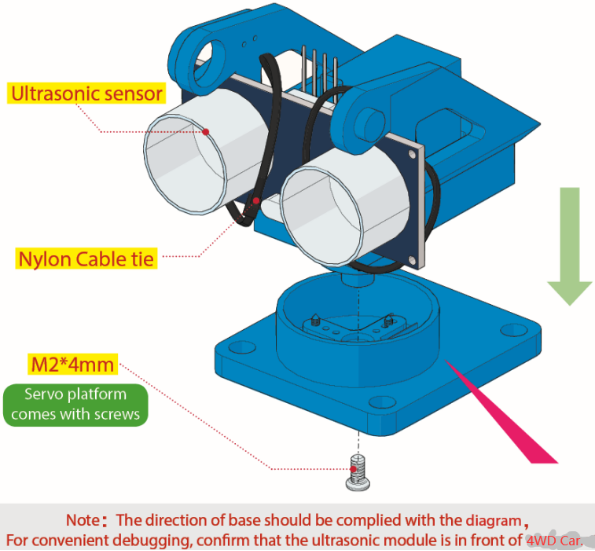
4.3. Diagrama de instalación.
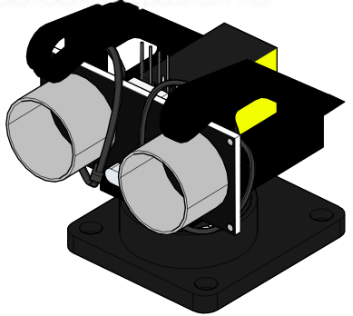
4.4. Prototipo.
parte 5
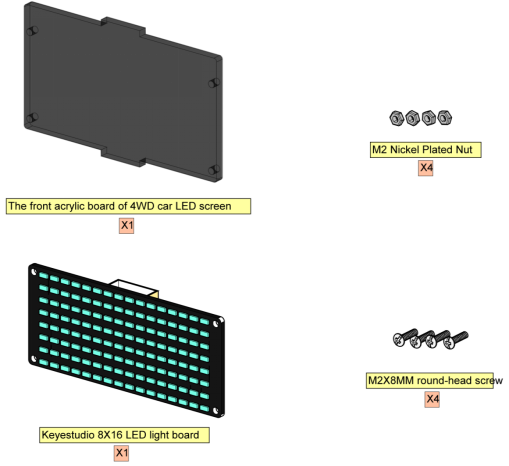
5.1. Componentes necesarios.
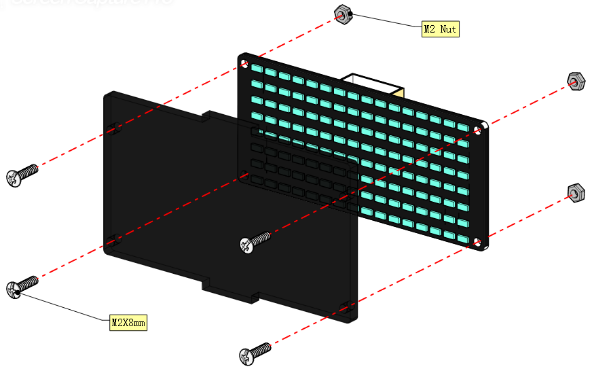
5.2. Diagrama de instalación.
5.3. Prototipo.
parte 6
6.1. Componentes necesarios.
6.2. Diagrama de instalación.
6.3. Prototipo.
parte 7
7.1. Componentes necesarios.
7.2. Diagrama de instalación.
7.3. Prototipo.
parte 8
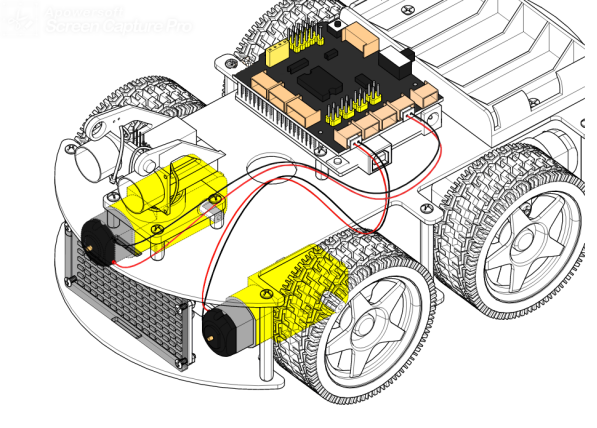
8.1. Diagrama de cableado.
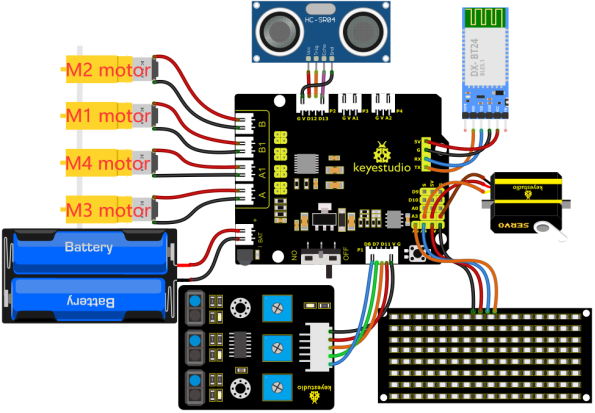
8.2. El motor M2 está conectado a la interfaz B, el motor M3 está conectado a la interfaz A.
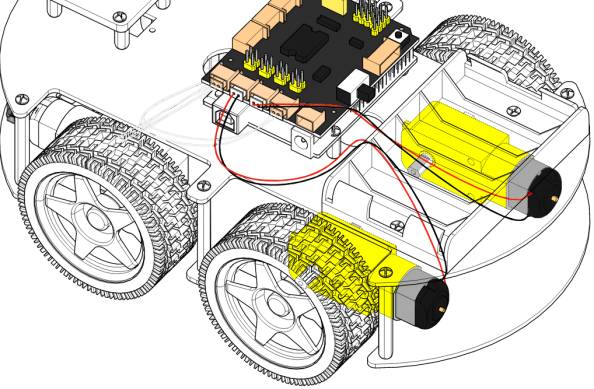
8.3. El motor M1 está conectado a la interfaz B1, el motor M4 está conectado a la interfaz A1.
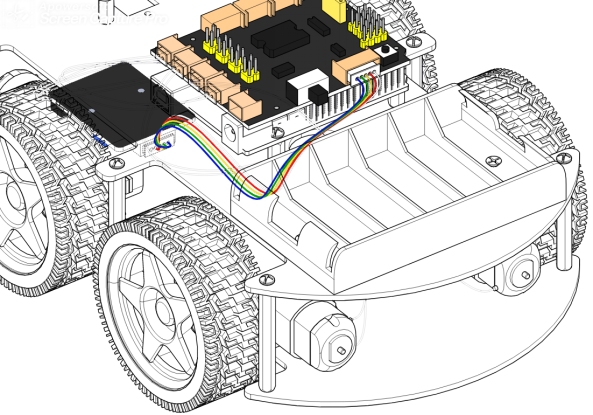
8.4. Cableado del sensor de seguimiento de línea de 3 canales.
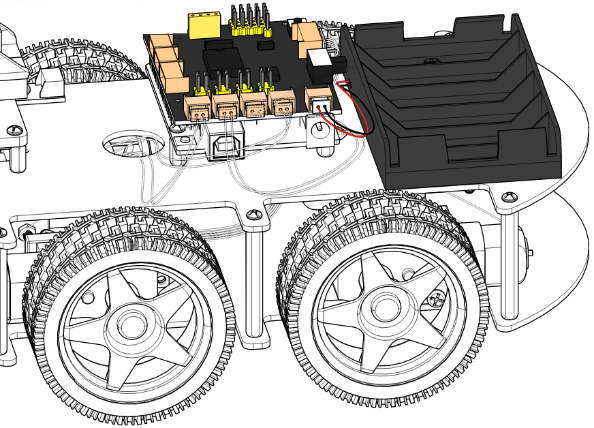
8.5. La fuente de alimentación está conectada a BAT.
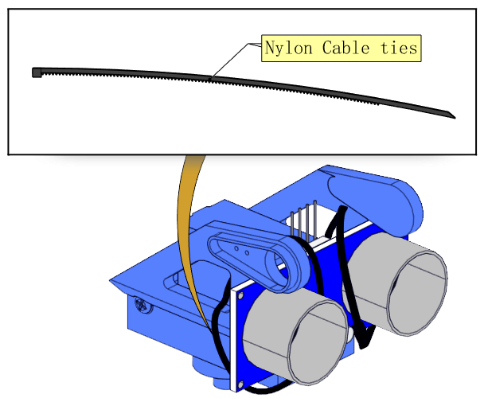
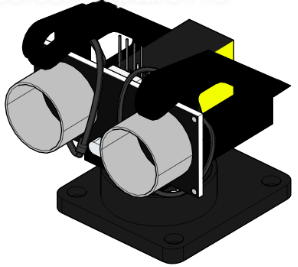
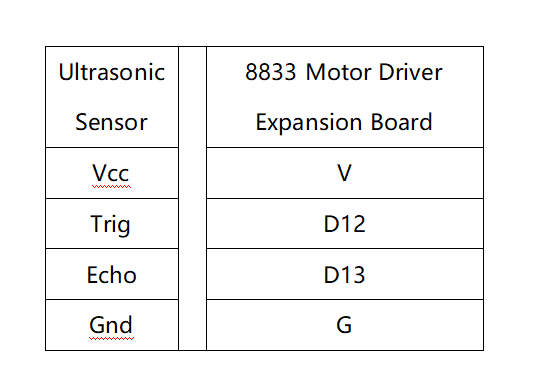
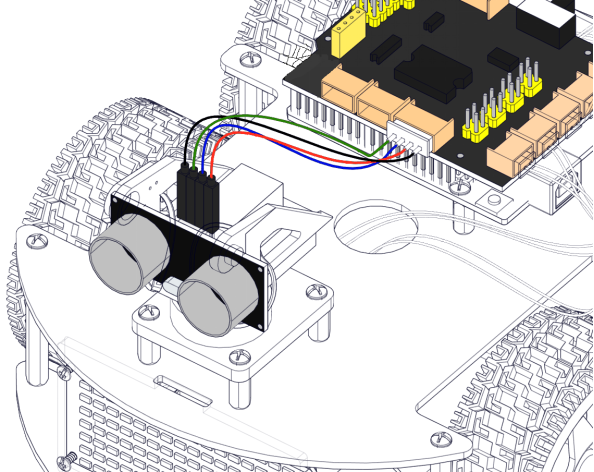
8.6. Cableado del sensor ultrasónico.
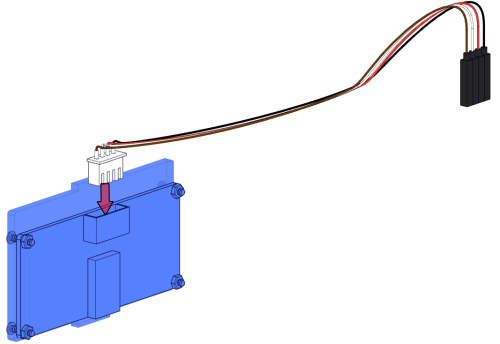
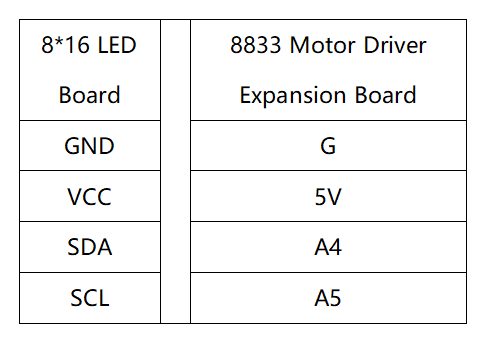
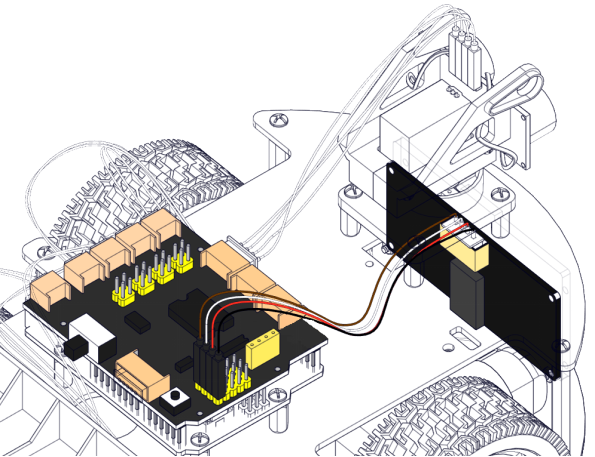
8.7. Cableado de la placa LED 8*16.
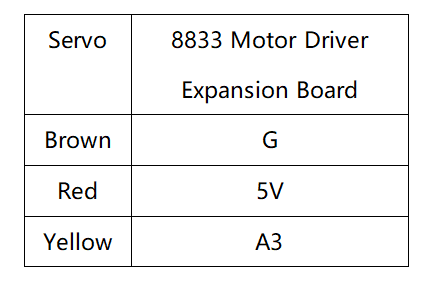
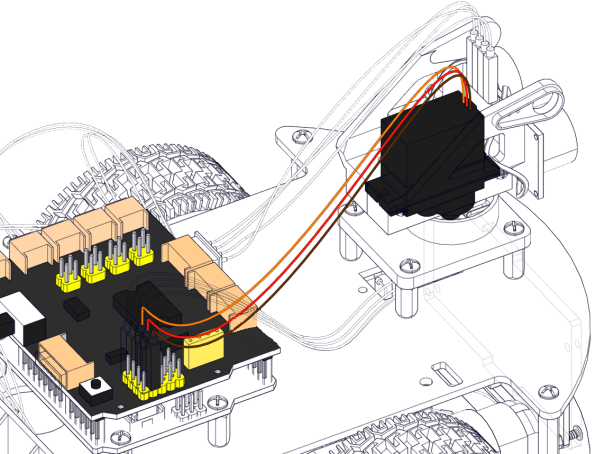
8.8. Cableado del servo.
8.9. Conecte el módulo Bluetooth y los puentes.
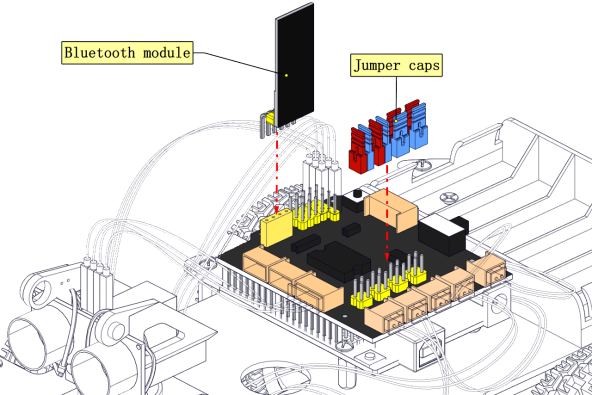
Nota: Antes de cargar el código de prueba, debe retirar el módulo Bluetooth, de lo contrario el código no se cargará correctamente. Conecte el módulo Bluetooth después de cargar el código con éxito.
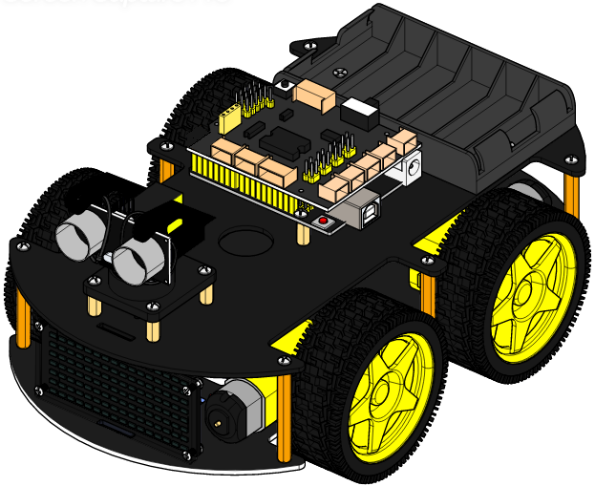
8.10. Prototipo completo.