1. Démarrage avec le robot 4WD
1.1 Introduction
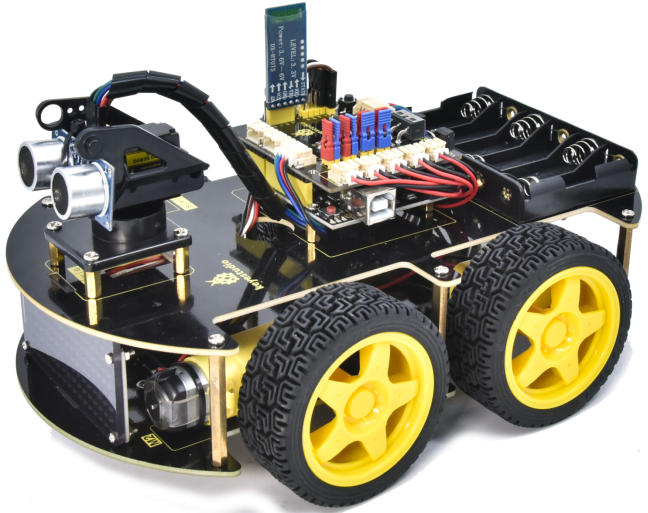
La voiture multi-usage 4WD nouvellement améliorée est l’un des ensembles Arduino les plus populaires. Elle possède non seulement une belle apparence, mais aussi des fonctions puissantes. En plus des fonctions habituelles de suivi de ligne, d’évitement d’obstacles et de télécommande, elle utilise également des expressions faciales pour afficher des expressions adorables. De plus, vous avez la possibilité d’étendre vos propres projets ou d’ajouter d’autres capteurs pour compléter votre exploration.
La plupart des composants sont connectés via des vis et des entretoises en cuivre, ce qui vous permet de construire votre propre robot en quelques étapes d’assemblage simples.
De plus, les connaissances de base telles que le suivi de ligne, les capteurs d’évitement d’obstacles, la mesure ultrasonique, la communication Bluetooth, les pilotes de moteur ainsi que les télécommandes IR sont accessibles pour notre apprentissage.
Ce produit propose 17 projets d’apprentissage, du plus simple au plus complexe, qui vous guideront pour réaliser un robot Arduino.
1.2 Liste du kit
# |
Nom |
Qté |
Image |
|---|---|---|---|
1 |
Carte Keyestudio V4.0 (compatible UNO) |
1 |
|
2 |
Carte d’extension pilote moteur Keyestudio |
1 |
|
3 |
Module Bluetooth |
1 |
|
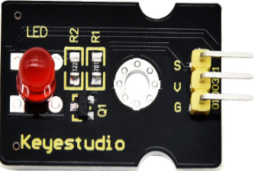
4 |
Module LED rouge |
1 |
|
5 |
Capteur ultrasonique |
1 |
|
6 |
Capteur de suivi de ligne Keyestudio |
1 |
|
7 |
Carte LED 8*16 Keyestudio (câble de connexion 4 broches) |
1 |
|
8 |
Servo |
1 |
|
9 |
Télécommande IR |
1 |
|
10 |
Câble USB |
1 |
|
11 |
Support de batterie 18650 |
1 |
|
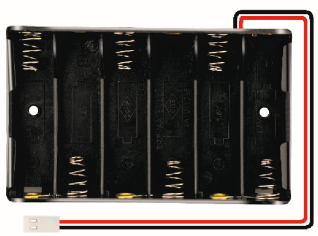
12 |
Support de 6 piles AA |
1 |
|
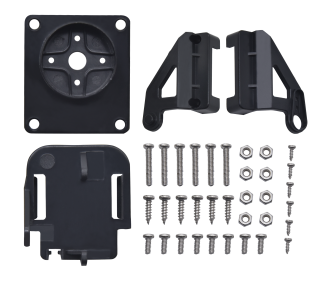
13 |
Tête de berceau |
1 |
|
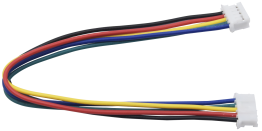
14 |
Fil JST-PH2.0MM-5P 24AWG 150MM |
1 |
|
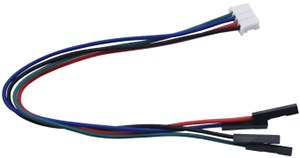
15 |
Fil PH2.0mm-4P vers Dupont 2.54 150MM |
1 |
|
16 |
Plaque acrylique |
1 |
|
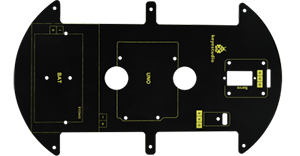
17 |
Carte supérieure Keyestudio |
1 |
|
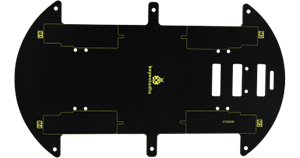
18 |
Carte de base Keyestudio |
1 |
|
19 |
Pièces de fixation |
4 |
|
20 |
Roues |
4 |
|
21 |
Entretoise cuivre double passage M3*10MM |
10 |
|
22 |
Entretoise cuivre double passage M3*40MM |
4 |
|
23 |
Vis tête ronde M3*30MM |
8 |
|
24 |
Vis tête ronde M3*6MM |
40 |
|
25 |
Écrou nickelé M3 |
16 |
|
26 |
Vis tête ronde M2*8MM |
6 |
|
27 |
Vis tête ronde M3*8MM |
4 |
|
28 |
Écrou nickelé M2 |
6 |
|
29 |
Vis tête plate M3*10MM |
3 |
|
30 |
Moteur |
4 |
|
31 |
Tournevis |
1 |
|
32 |
Attaches noires |
6 |
|
33 |
Tube enrouleur |
1 |
|
34 |
Câble Dupont 3 broches F-F 20CM |
1 |
|
35 |
Carte décorative |
1 |
|
36 |
Capuchon de cavalier bleu |
4 |
|
37 |
Capuchon de cavalier rouge |
4 |
|
38 |
Piste de suivi |
1 |
|



























1.3 Caractéristiques
Fonction polyvalente : Évitement d’obstacles, suivi, télécommande IR, contrôle Bluetooth, confinement dans un cercle, contrôle par gravité ainsi qu’affichage d’émoticônes faciales.
Assemblage simple : Aucun circuit à souder requis, assemblage facile.
Construction robuste : Châssis 4WD, 4 moteurs et roues de qualité supérieure.
Haute extensibilité : Possibilité d’étendre avec d’autres capteurs et modules via une carte d’extension de pilote moteur.
Contrôles multiples : Télécommande IR, contrôle via application (systèmes iOS et Android).
Programmation de base : Code en langage C pour Arduino IDE.
1.4 Spécifications
Tension de fonctionnement : 5V
Tension d’entrée : 6-9V
Courant de sortie maximal : 2A
Puissance dissipée maximale : 25W (T=75℃)
Vitesse du moteur : 5V 200 tr/min
Mode de pilotage moteur : Pilote moteur DRV8833
Angle d’induction ultrasonique : <15 degrés
Distance de détection ultrasonique : 2cm-400cm
Distance de télécommande infrarouge : 10M (mesuré)
Distance de télécommande Bluetooth : 50M (mesuré)
Contrôle Bluetooth : compatible avec les systèmes Android et iOS
1.5 Carte de développement
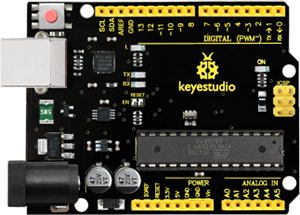
Il est important de savoir que la carte de développement keyestudio V4.0 est le cœur de cette voiture multifonction 4WD BT V2.0.
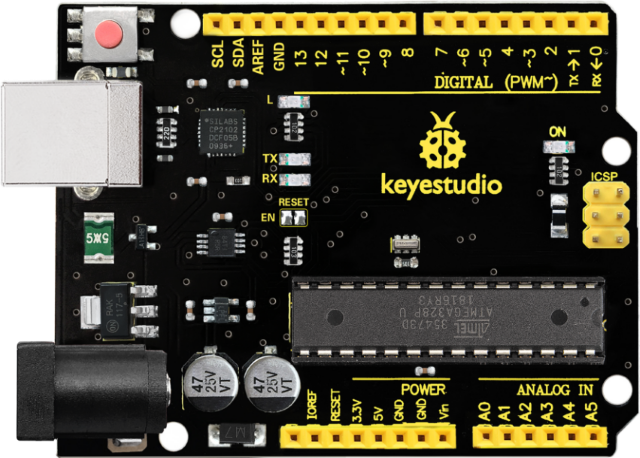
La carte de développement keyestudio V4.0 est une carte compatible Arduino Uno, basée sur le microcontrôleur ATmega328P, et équipée d’une puce CP2102 servant de convertisseur UART vers USB.
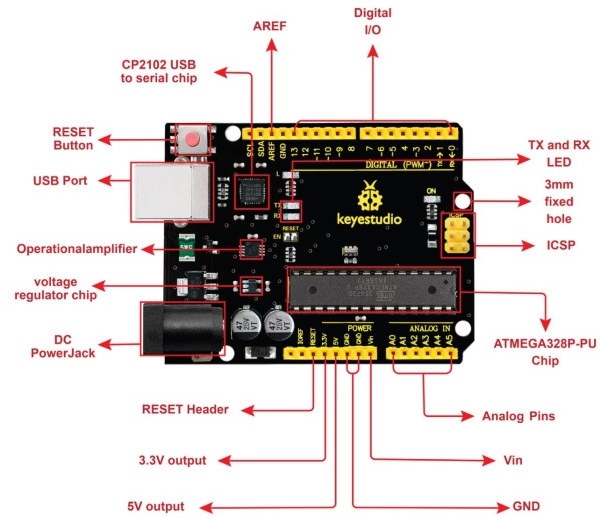
Elle dispose de 14 broches d’entrée/sortie numériques (dont 6 peuvent être utilisées comme sorties PWM), 6 entrées analogiques, un cristal quartz de 16 MHz, une connexion USB, une prise d’alimentation, 2 connecteurs ICSP et un bouton de réinitialisation.
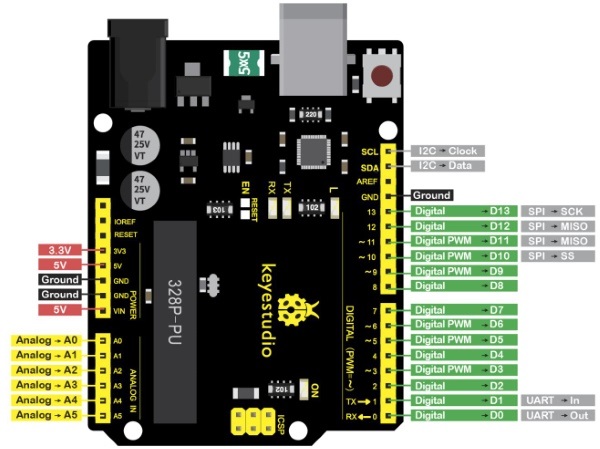
Elle contient tout ce qui est nécessaire pour supporter le microcontrôleur : il suffit de la connecter à un ordinateur via un câble USB ou de l’alimenter via une prise d’alimentation DC externe (DC 7-12V) ou via les broches femelles Vin/GND (DC 7-12V) pour démarrer.
Microcontrôleur |
ATmega328P-PU |
|---|---|
Tension de fonctionnement |
5V |
Tension d’entrée (recommandée) |
DC 7-12V |
Broches numériques I/O |
14 (D0-D13) (dont 6 fournissent une sortie PWM) |
Broches numériques PWM I/O |
6 (D3, D5, D6, D9, D10, D11) |
Broches d’entrée analogique |
6 (A0-A5) |
Courant continu par broche I/O |
20 mA |
Courant continu pour la broche 3.3V |
50 mA |
Mémoire Flash |
32 KB (ATmega328P-PU) dont 0,5 KB utilisés par le bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Fréquence d’horloge |
16 MHz |
LED intégrée |
D13 |
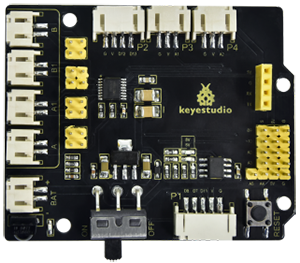
1.6 Shield moteur
Description:
La carte 8833 adopte la puce pilote moteur 8833 commandée par des ponts en H à deux canaux, et le courant maximal de commande d’un seul canal atteint 1,5A, avec une connexion terminale PH2.0.
Le module récepteur IR est également intégré sur la carte. De plus, il y a de nombreuses interfaces d’extension PH2.0 sur la carte telles que l’interface ultrason, l’interface analogique, l’interface de suivi à trois canaux ainsi que des interfaces à broches pour Bluetooth et le pilote moteur.
Spécifications:
Tension |
USB 5V,DC 6-9V |
|---|---|
Courant |
La sortie maximale est de 3A, la sortie réelle est d’environ 1A (2A lorsque le moteur est chargé) |
Puissance maximale |
27W(La valeur réelle est d’environ 9W) |
Température de fonctionnement |
-10~50 degrés |
Dimensions |
69x56x18mm |
Poids |
25,5g |
Attributs de protection environnementale |
ROHS |
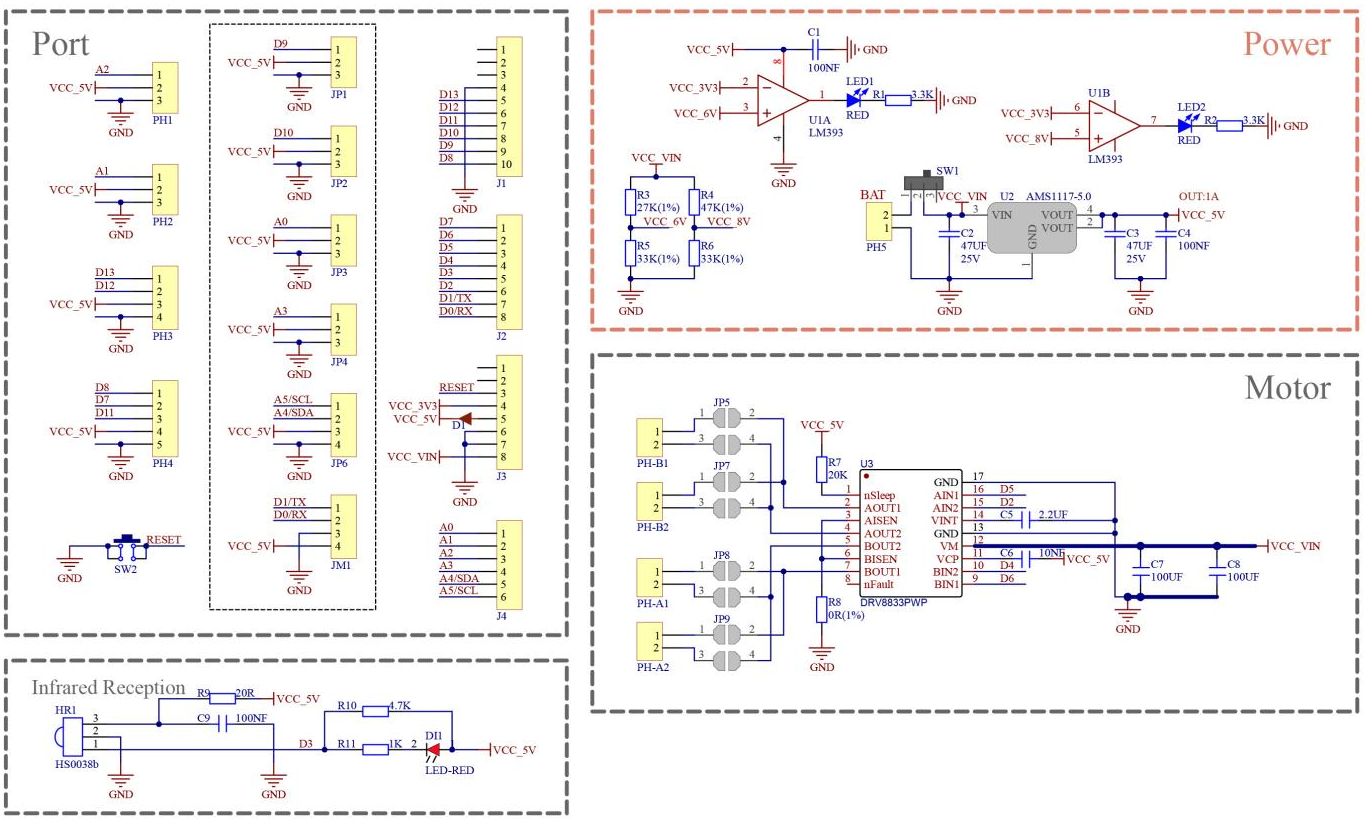
Fonction:
Schéma électrique: