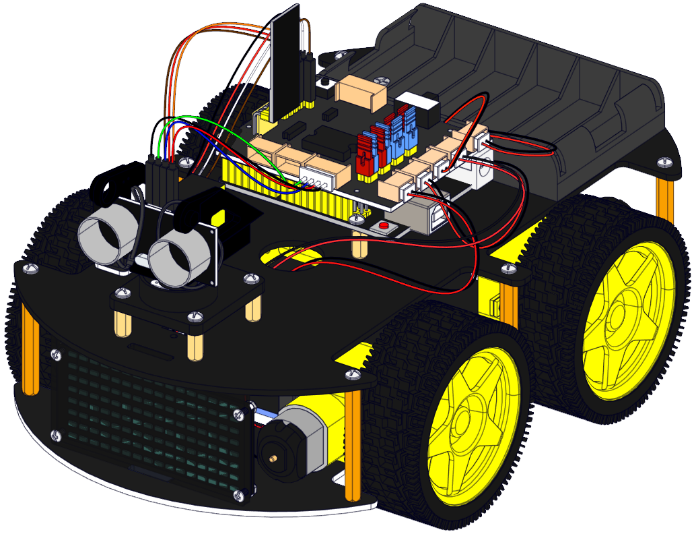
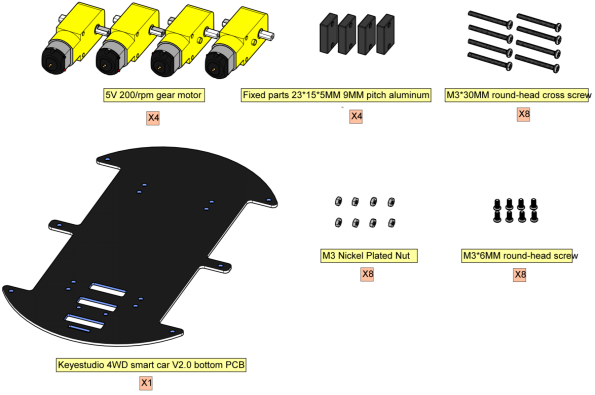
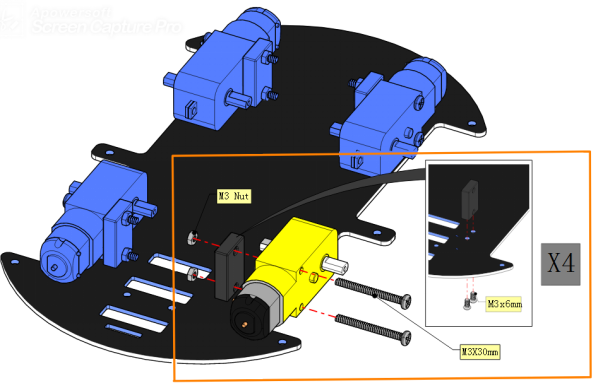
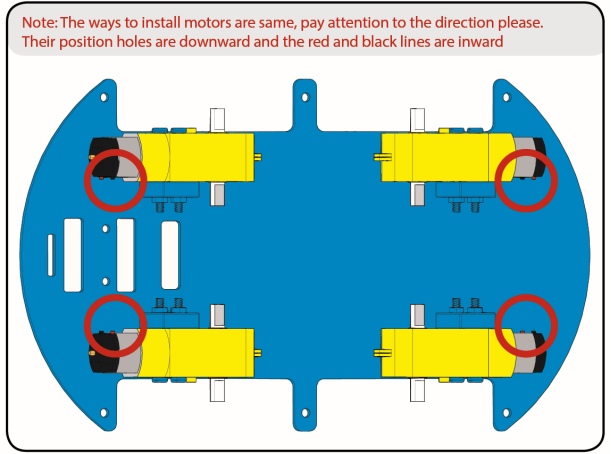
2 Assemblage
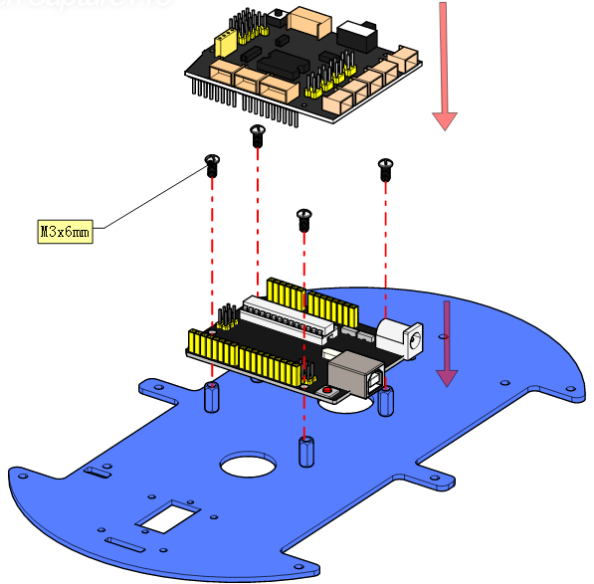
partie 1
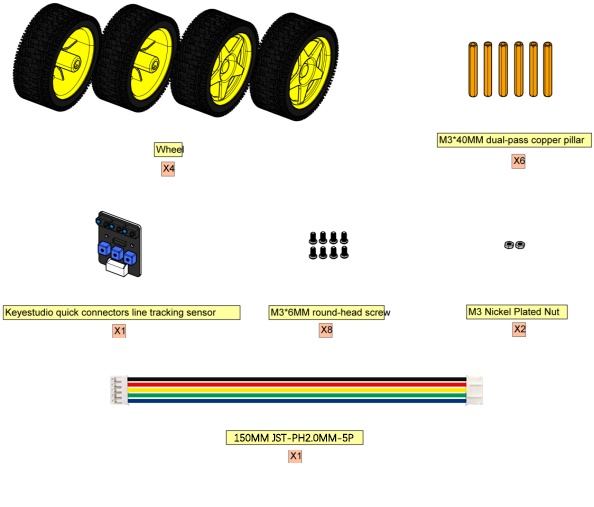
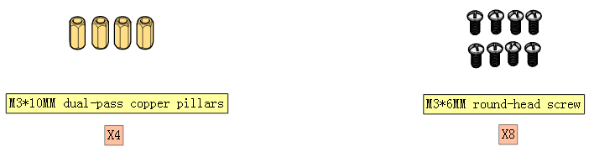
1.1. Composants nécessaires.
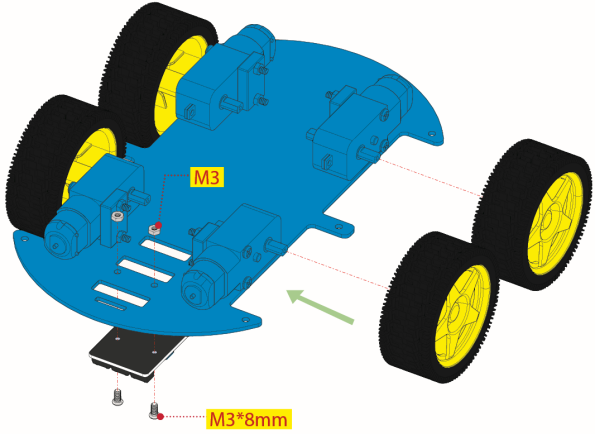
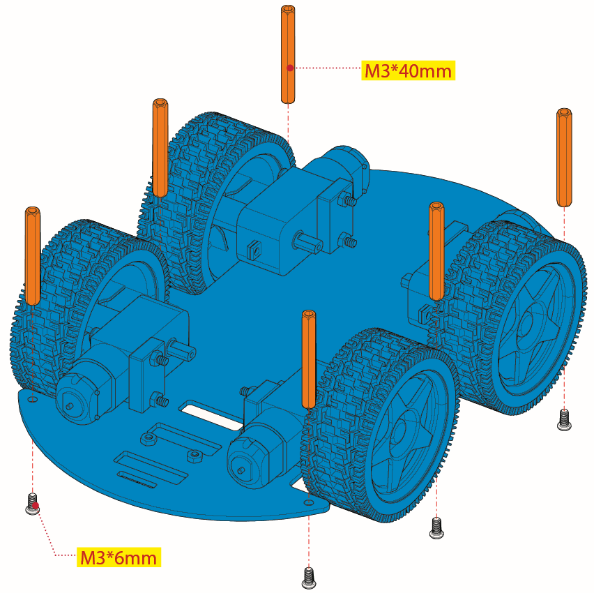
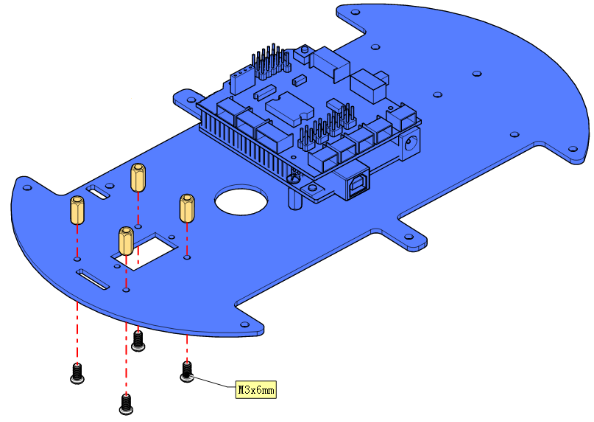
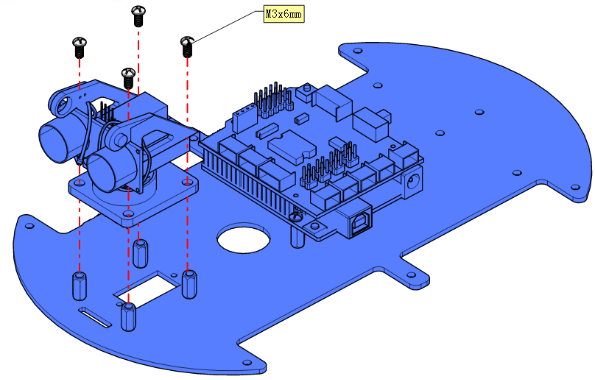
1.2. Schéma d’installation.
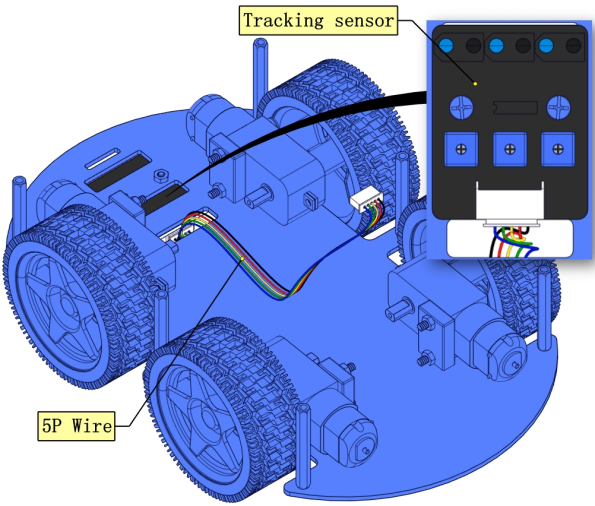
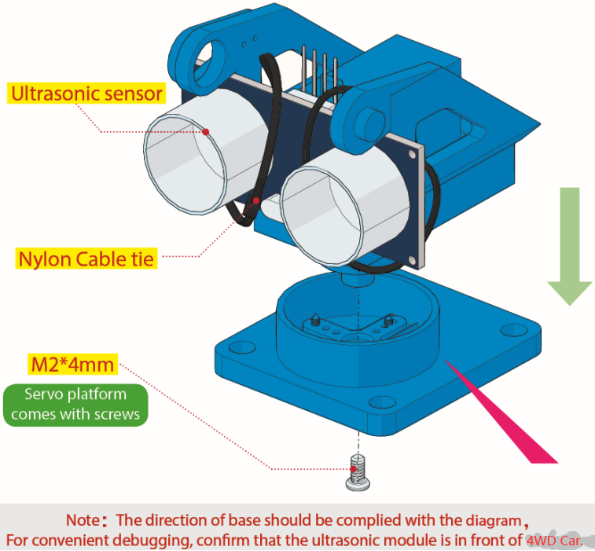
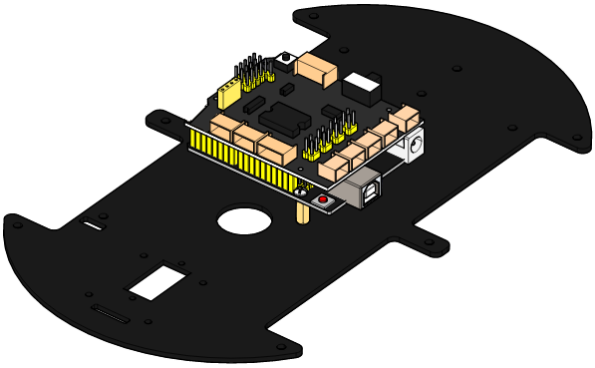
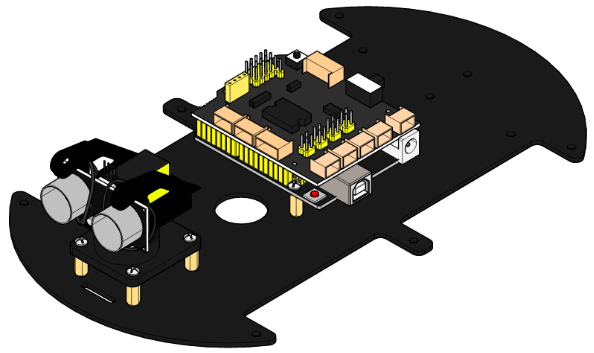
1.3. Prototype.
partie 2
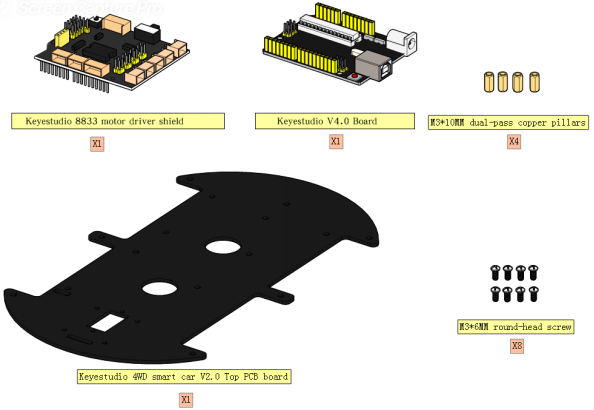
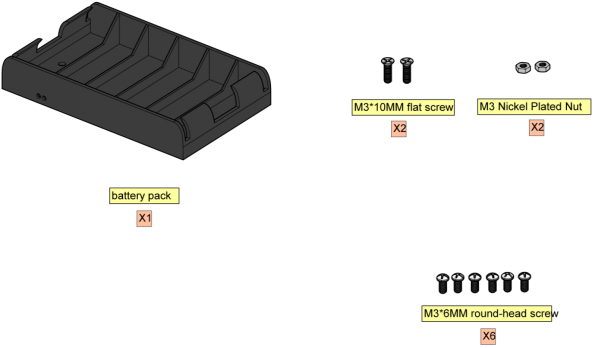
2.1. Composants nécessaires.
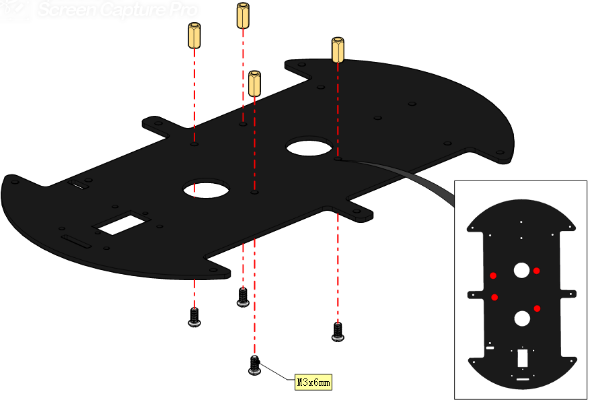
2.2. Schéma d’installation.
2.3. Prototype.
partie 3
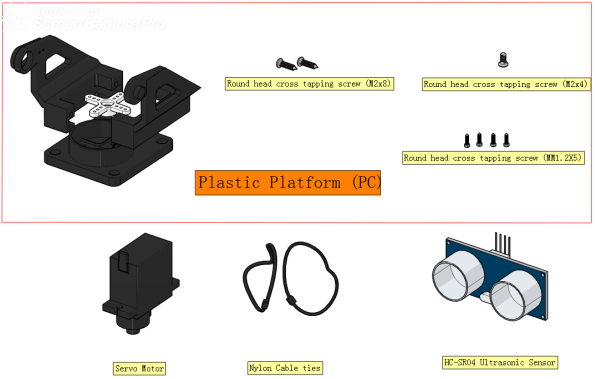
3.1. Composants nécessaires.

3.2. Schéma d’installation.
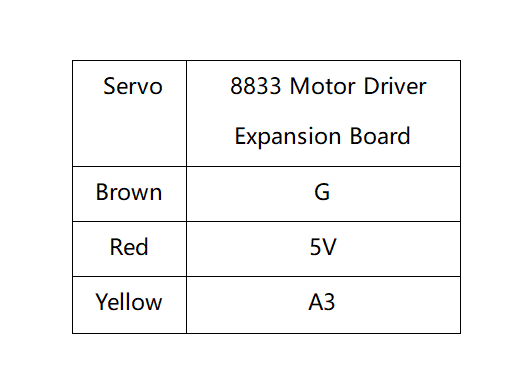
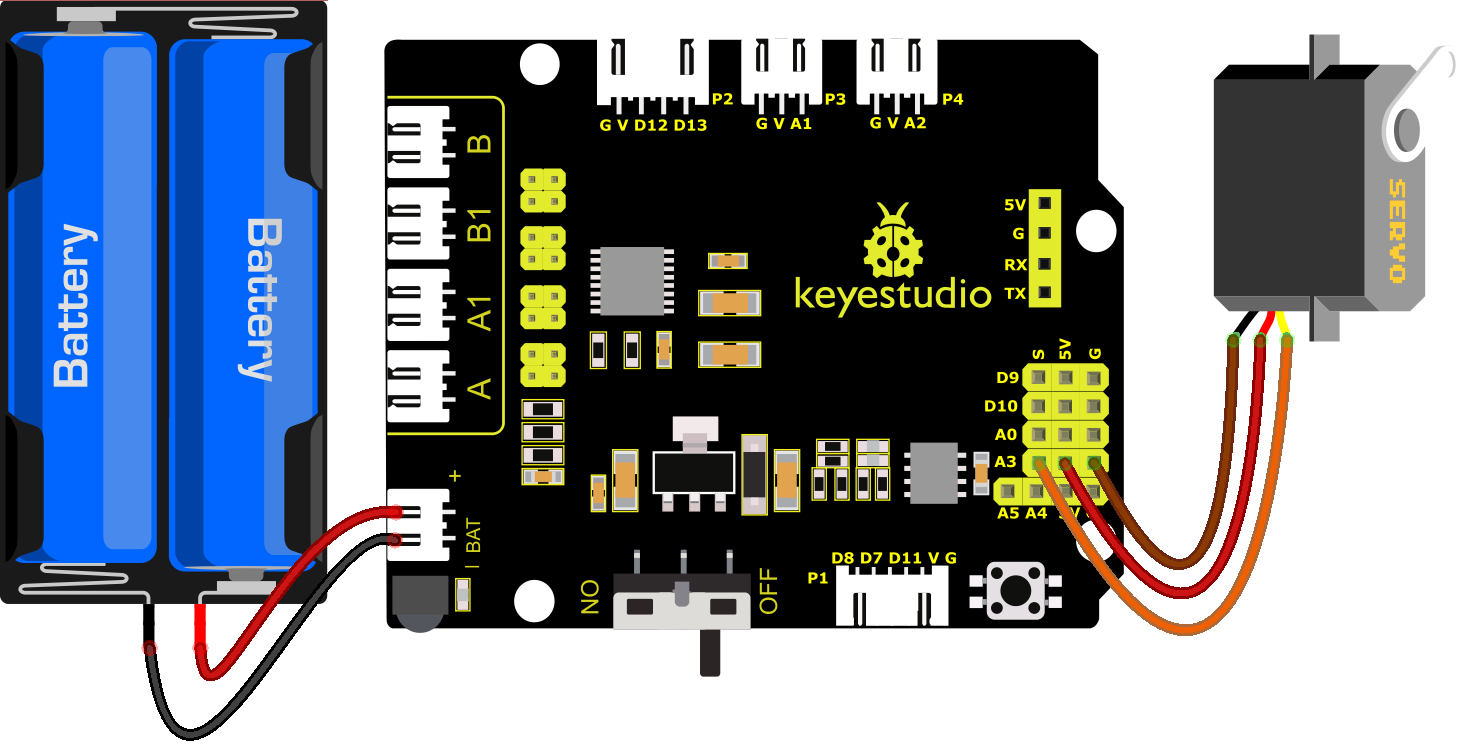
3.3. Câblage.
3.4. Prototype.
partie 4
4.1. Composants nécessaires.
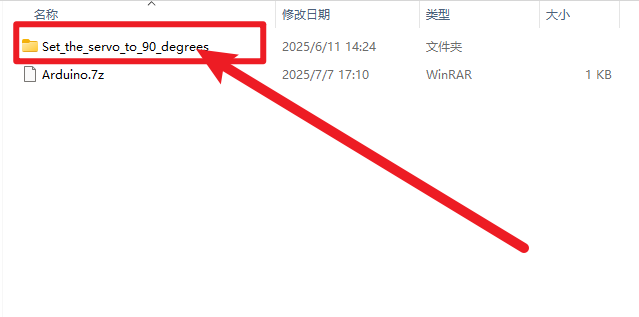
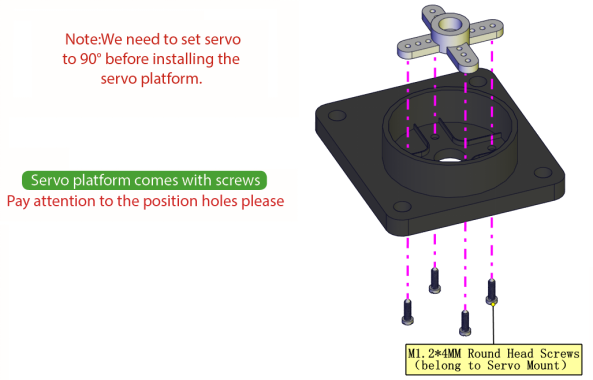
4.2. Faites tourner le servo à 90 degrés.
Pour ajuster le code du servo, veuillez le sélectionner selon le cours.
1.**Arduino :**Téléchargez le fichier code :Arduino
2.**Kidsblock :**Téléchargez le fichier code :Kidsblock

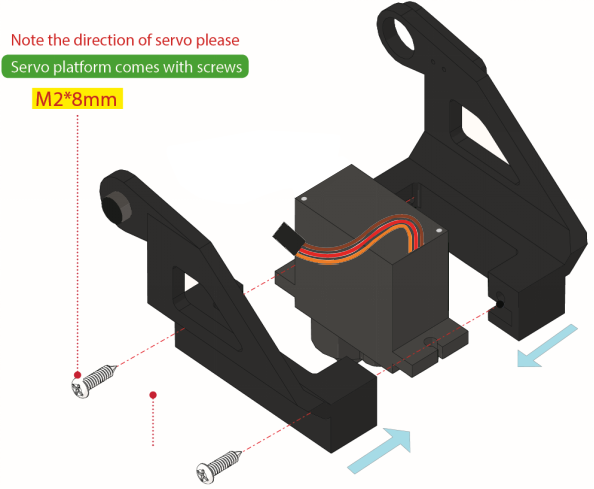
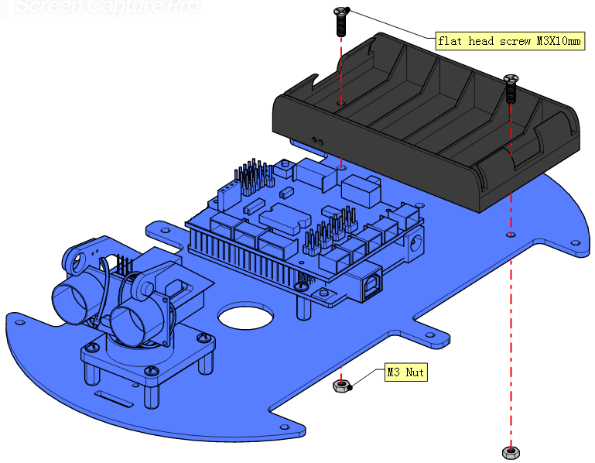
4.3. Schéma d’installation.
4.4. Prototype.
partie 5
5.1. Composants nécessaires.
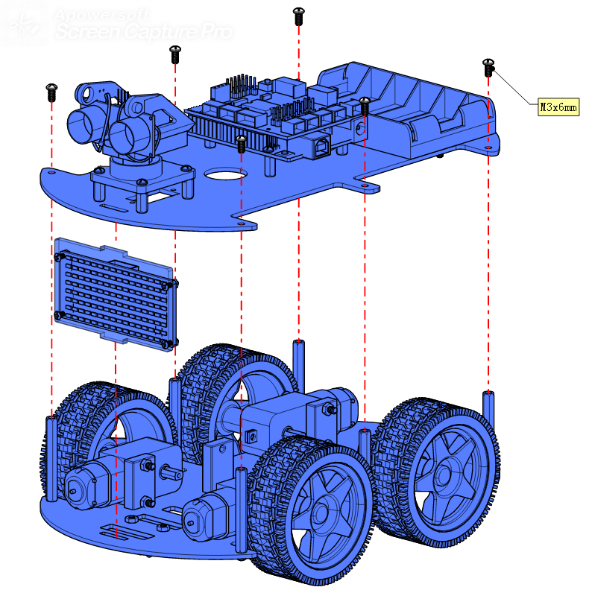
5.2. Schéma d’installation.
5.3. Prototype.
partie 6
6.1. Composants nécessaires.
6.2. Schéma d’installation.
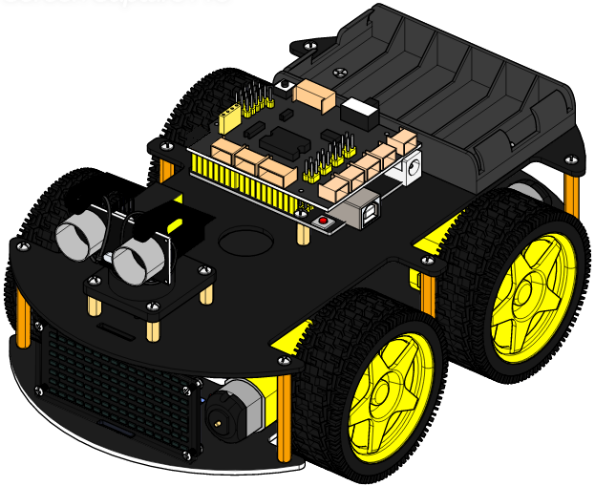
6.3. Prototype.
partie 7
7.1. Composants nécessaires.
7.2. Schéma d’installation.
7.3. Prototype.
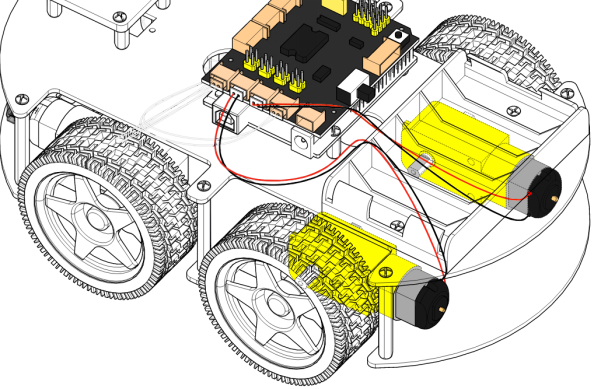
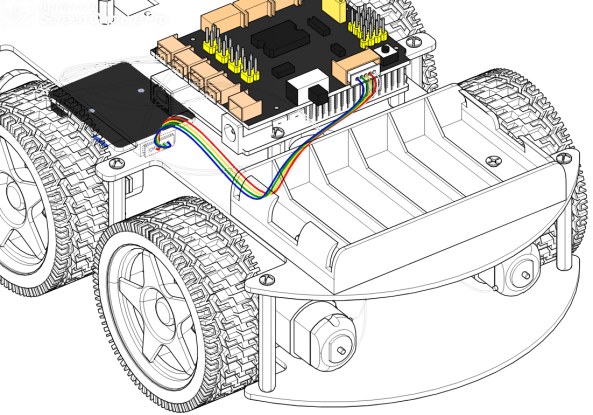
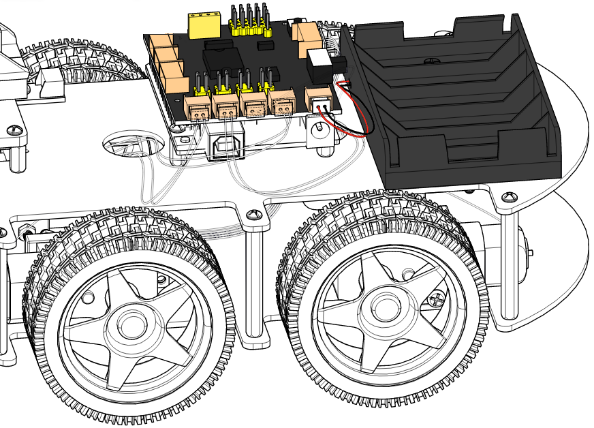
partie 8
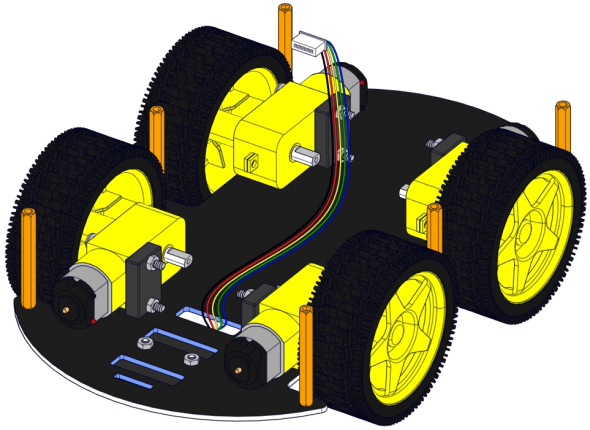
8.1. Schéma de câblage.
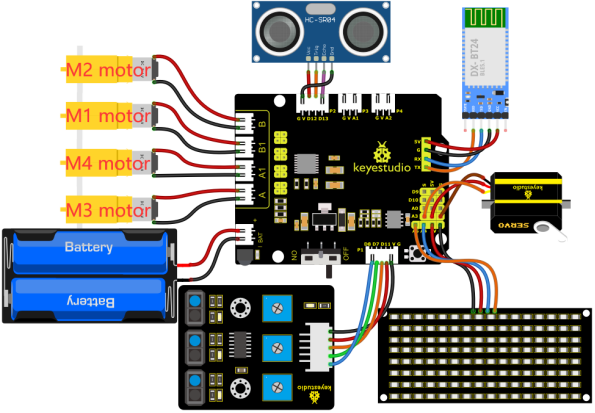
8.2. Le moteur M2 est connecté à l’interface B, le moteur M3 est connecté à l’interface A.
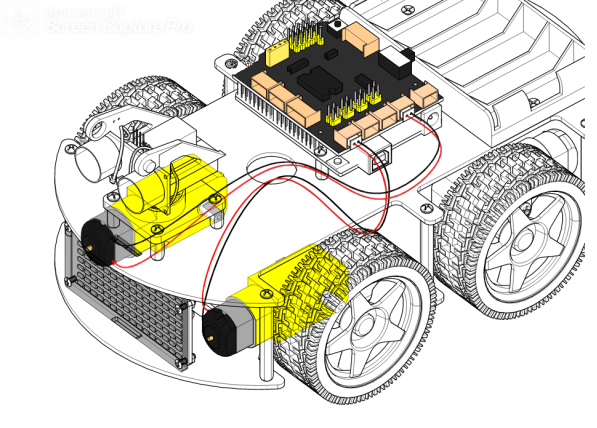
8.3. Le moteur M1 est connecté à l’interface B1, le moteur M4 est connecté à l’interface A1.
8.4. Le câblage du capteur de suivi de ligne 3 canaux.
8.5. L’alimentation est connectée à BAT.
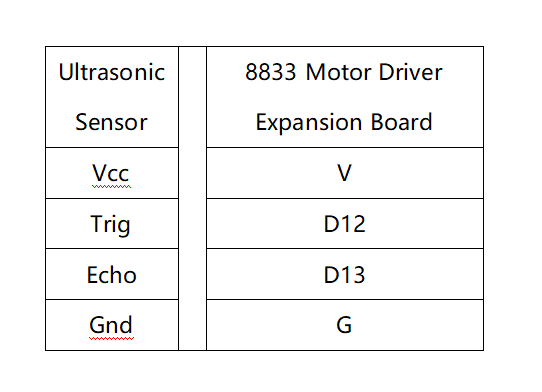
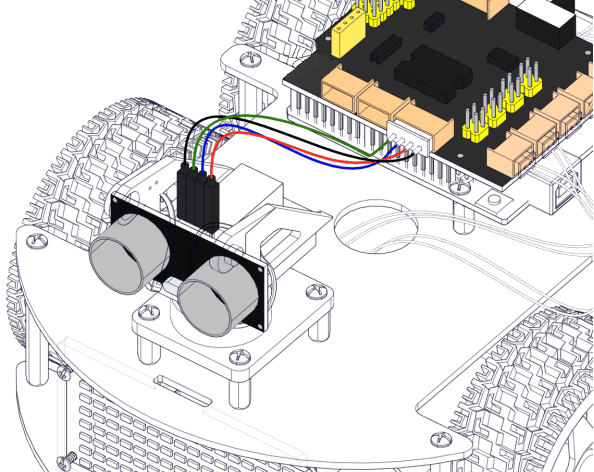
8.6. Le câblage du capteur ultrasonique.
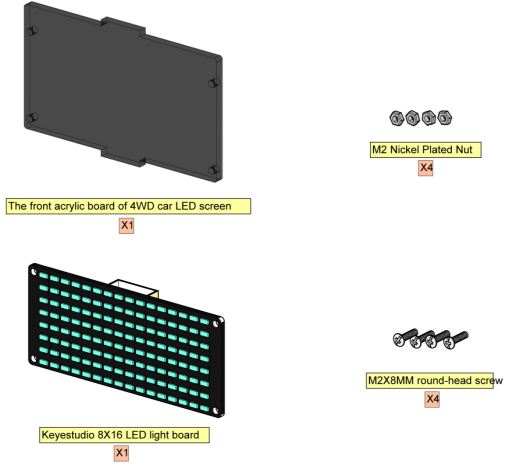
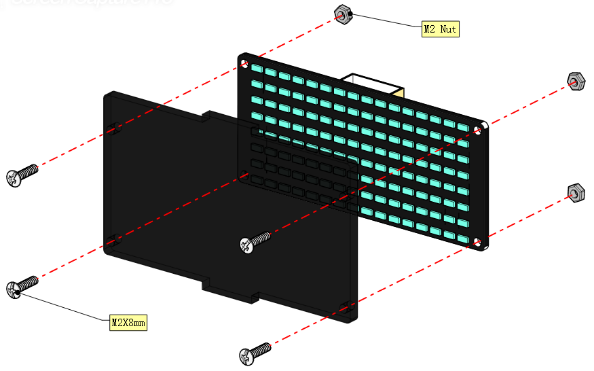
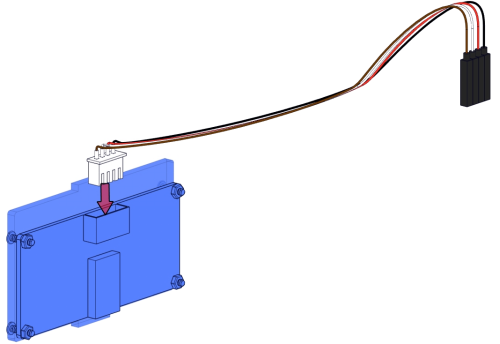
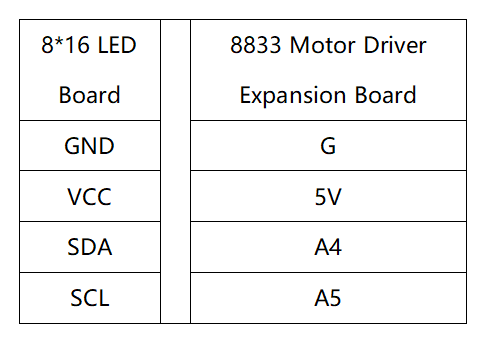
8.7. Le câblage de la matrice LED 8*16.

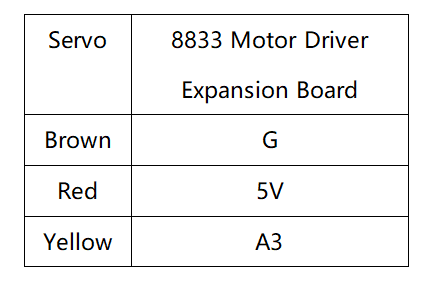
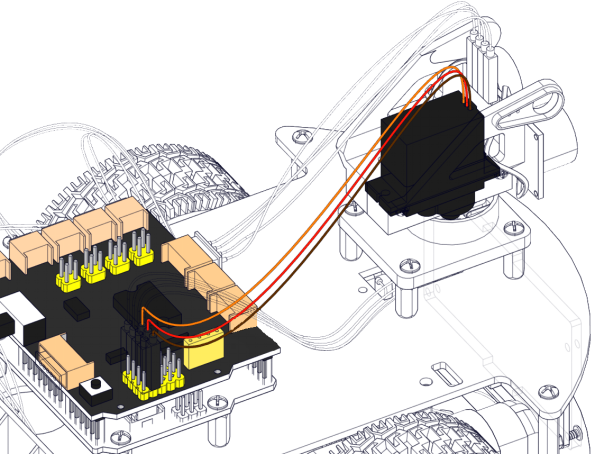
8.8. Le câblage du servo.
8.9. Branchez le module Bluetooth et les cavaliers.
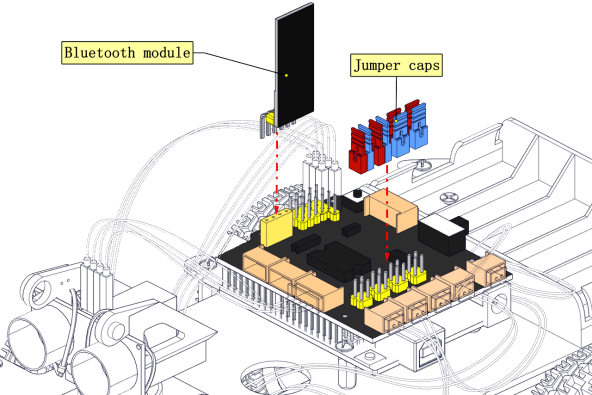
Note : Avant de téléverser le code de test, vous devez retirer le module Bluetooth, sinon le code ne pourra pas être téléversé. Reconnectez le module Bluetooth après un téléversement réussi.
8.10. Prototype complet.