1. 4WDロボットの始め方
1.1 はじめに
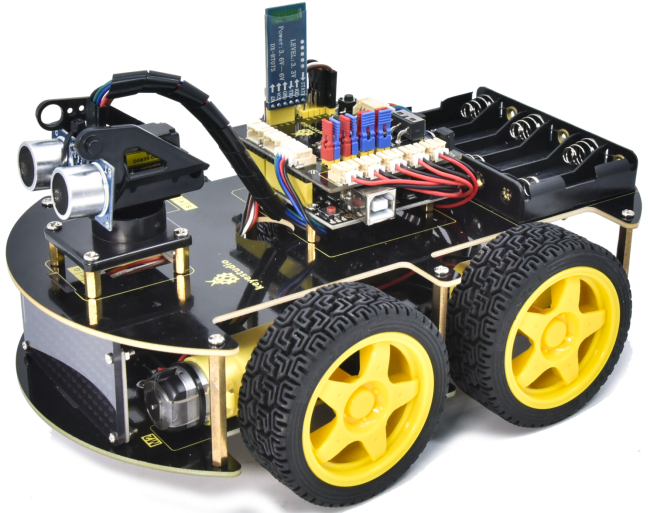
新たにアップグレードされた4WD多目的カーは、最も人気のあるArduinoセットの一つです。美しい外観だけでなく、強力な機能を備えています。通常のライントラッキング、障害物回避、リモコン操作に加え、表情を使って可愛らしい表現も可能です。さらに、ご自身のプロジェクトを拡張したり、他のセンサーを追加して探求を完成させることもできます。
ほとんどの部品はネジと銅柱で接続されているため、いくつかの簡単な組み立て手順で自分のロボットを作ることができます。
さらに、ライントラッキング、障害物回避センサー、超音波測距、Bluetooth通信、モータードライバー、IRリモコンなどの基本知識を学ぶことができます。
本製品は、簡単なものから複雑なものまで17の学習プロジェクトを備えており、Arduinoロボットの作成をガイドします。
1.2 キットリスト
# |
名前 |
数量 |
画像 |
|---|---|---|---|
1 |
Keyestudio V4.0 ボード(UNO互換) |
1 |
|
2 |
Keyestudio モータードライバー拡張ボード |
1 |
|
3 |
Bluetoothモジュール |
1 |
|
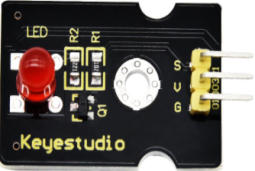
4 |
赤色LEDモジュール |
1 |
|
5 |
超音波センサー |
1 |
|
6 |
Keyestudio ライントラッキングセンサー |
1 |
|
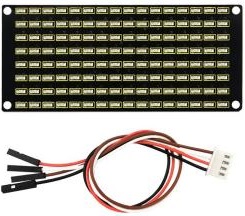
7 |
Keyestudio 8*16 LEDボード(4ピン接続ワイヤー付き) |
1 |
|
8 |
サーボ |
1 |
|
9 |
IRリモコン |
1 |
|
10 |
USBケーブル |
1 |
|
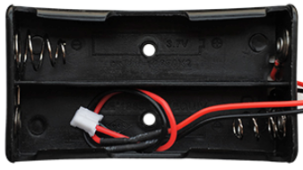
11 |
18650バッテリーホルダー |
1 |
|
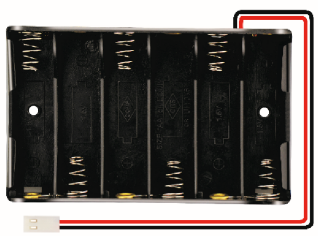
12 |
6本用AAバッテリーホルダー |
1 |
|
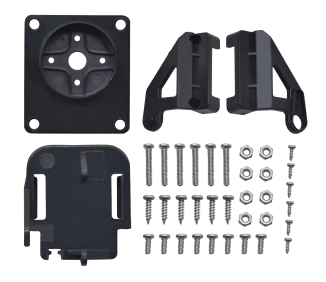
13 |
クレードルヘッド |
1 |
|
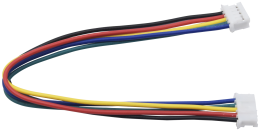
14 |
150mm JST-PH2.0mm-5P 24AWGワイヤー |
1 |
|
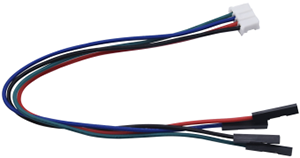
15 |
150mm PH2.0mm-4P to 2.54 Dupontワイヤー |
1 |
|
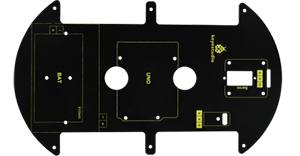
16 |
アクリルボード |
1 |
|
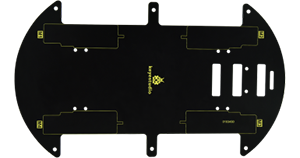
17 |
Keyestudio トップボード |
1 |
|
18 |
Keyestudio ベースボード |
1 |
|
19 |
固定パーツ |
4 |
|
20 |
ホイール |
4 |
|
21 |
M3*10mm 両通し銅柱 |
10 |
|
22 |
M3*40mm 両通し銅柱 |
4 |
|
23 |
M3*30mm 丸頭ネジ |
8 |
|
24 |
M3*6mm 丸頭ネジ |
40 |
|
25 |
M3 ニッケルメッキナット |
16 |
|
26 |
M2*8mm 丸頭ネジ |
6 |
|
27 |
M3*8mm 丸頭ネジ |
4 |
|
28 |
M2 ニッケルメッキナット |
6 |
|
29 |
M3*10mm 平頭ネジ |
3 |
|
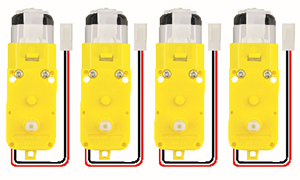
30 |
モーター |
4 |
|
31 |
ドライバー |
1 |
|
32 |
黒タイ |
6 |
|
33 |
配線パイプ |
1 |
|
34 |
20cm 3ピン F-F Dupontケーブル |
1 |
|
35 |
装飾カード |
1 |
|
36 |
青ジャンパーキャップ |
4 |
|
37 |
赤ジャンパーキャップ |
4 |
|
38 |
トラッキングランウェイ |
1 |
|
























1.3 特徴
多目的機能:障害物回避、追従、IRリモコン操作、Bluetooth制御、円内制限、重力制御および顔文字表示。
簡単組み立て:はんだ付け不要、簡単組み立て。
頑丈な構造:4WD構造、4つの高品質モーターとホイール。
高い拡張性:モータードライバー拡張ボードを介して他のセンサーやモジュールを拡張可能。
複数の制御方法:IRリモコン、アプリ制御(iOSおよびAndroid対応)
基本プログラミング:Arduino IDEのC言語コード。
1.4 仕様
動作電圧:5V
入力電圧:6-9V
最大出力電流:2A
最大消費電力:25W(T=75℃)
モーター速度:5V 200 rpm
モータードライブ方式:DRV8833モータードライバー
超音波検知角度:<15度
超音波検出距離:2cm~400cm
赤外線リモコン距離:10M(実測)
Bluetoothリモコン距離:50M(実測)
Bluetooth制御:AndroidおよびiOSシステム対応
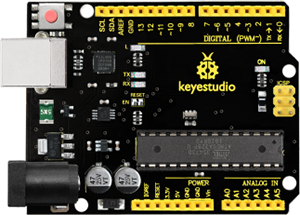
1.5 開発ボード
keyestudio V4.0開発ボードは、この4WD BT多目的カーV2.0のコアであることを知っておく必要があります。
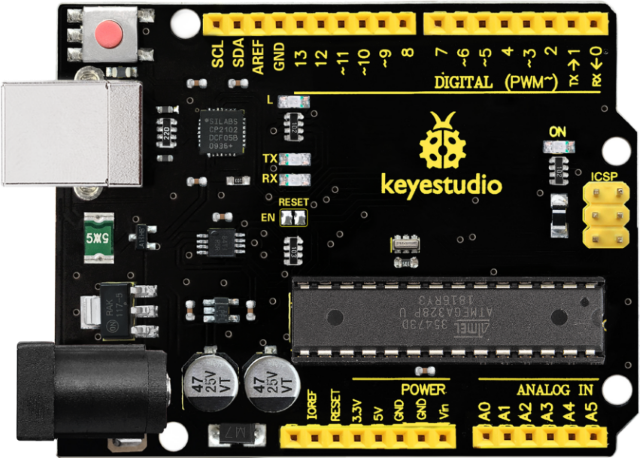
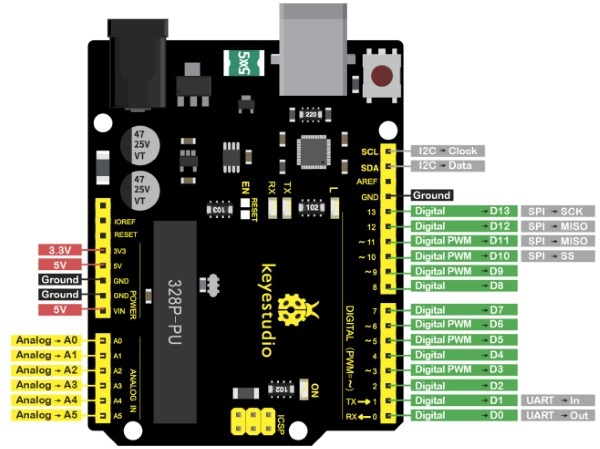
Keyestudio V4.0開発ボードはArduino Uno互換ボードで、ATmega328P MCUをベースに、UARTからUSBへの変換にCP2102チップを搭載しています。
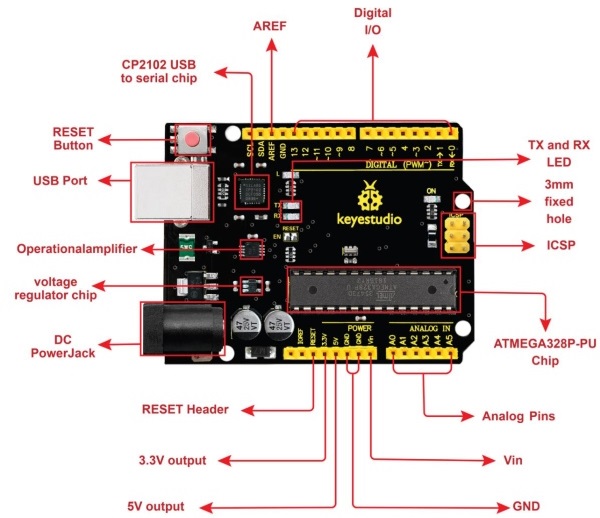
14本のデジタル入出力ピン(うち6本はPWM出力対応)、6本のアナログ入力、16 MHzの水晶振動子、USB接続、電源ジャック、2つのICSPヘッダー、リセットボタンを備えています。
マイコンをサポートするために必要なすべてを含んでおり、USBケーブルでコンピュータに接続するか、外部DC電源ジャック(DC 7-12V)またはメスヘッダーVin/GND(DC 7-12V)から電源を供給するだけで使用を開始できます。
マイクロコントローラ |
ATmega328P-PU |
|---|---|
動作電圧 |
5V |
推奨入力電圧 |
DC 7-12V |
デジタルI/Oピン |
14 (D0-D13) (うち6つはPWM出力対応) |
PWM対応デジタルI/Oピン |
6 (D3, D5, D6, D9, D10, D11) |
アナログ入力ピン |
6 (A0-A5) |
I/Oピンあたりの直流電流 |
20 mA |
3.3Vピンの直流電流 |
50 mA |
フラッシュメモリ |
32 KB (ATmega328P-PU)、うち0.5 KBはブートローダ使用 |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
クロックスピード |
16 MHz |
内蔵LED |
D13 |
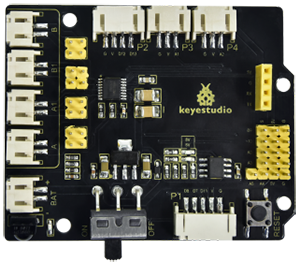
1.6 モーターシールド
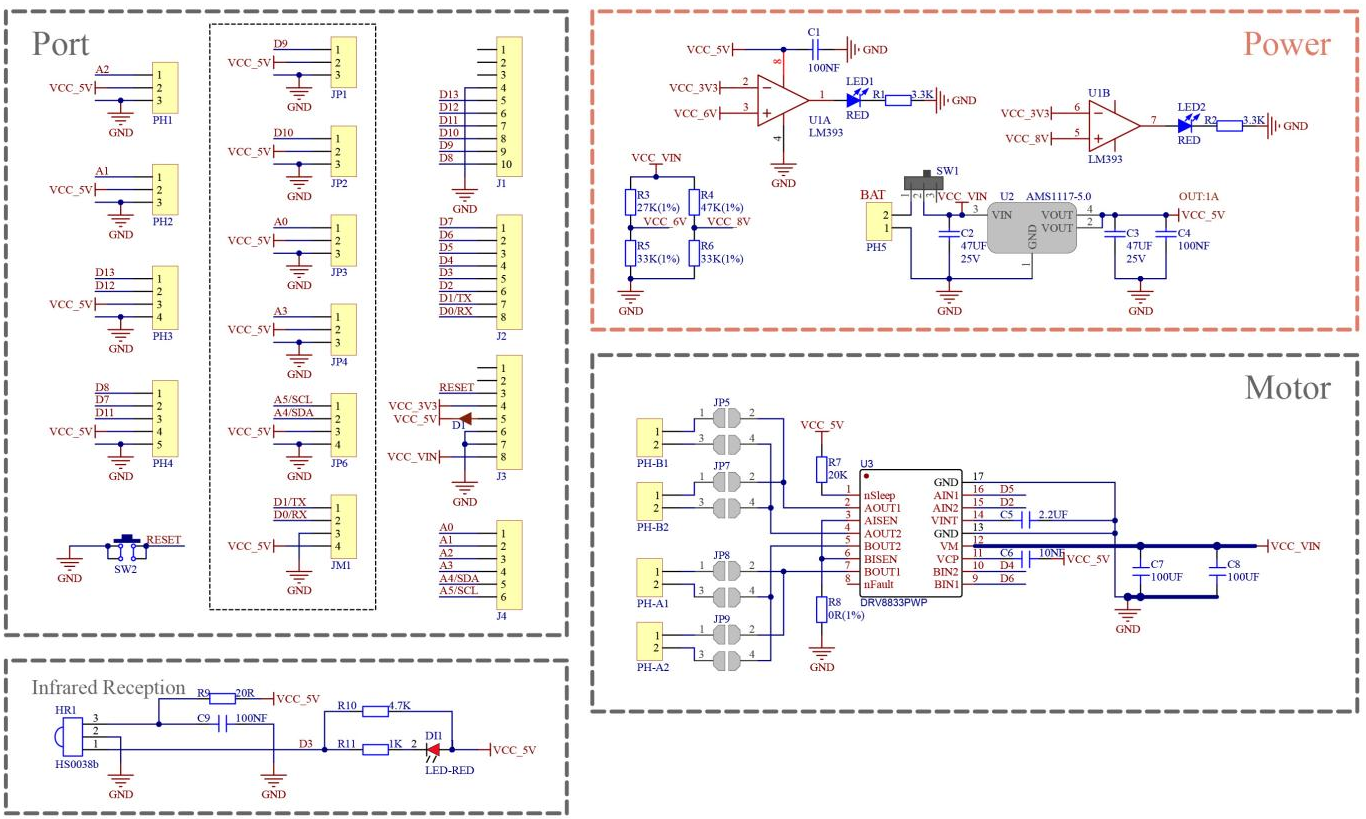
説明:
8833ボードは、2チャネルHブリッジ駆動の8833モータードライバチップを採用しており、単一チャネルの最大駆動電流は1.5Aまで対応し、PH2.0端子を使用しています。
また、IR受信モジュールもボードに統合されています。さらに、超音波インターフェース、アナログインターフェース、3チャネルトラッキングインターフェース、Bluetoothおよびモータードライバ用のピンインターフェースなど、多数のPH2.0拡張インターフェースがボード上に配置されています。
仕様:
電圧 |
USB 5V,DC 6-9V |
|---|---|
電流 |
最大出力は3A、実際の出力は約1A(モーター負荷時は2A) |
最大出力功率 |
27W(実際の値は約9W) |
動作温度範囲 |
-10~50度 |
寸法 |
69x56x18mm |
重量 |
25.5g |
環境保護属性 |
ROHS |
機能:
回路図: