2 組み立て
パート 1
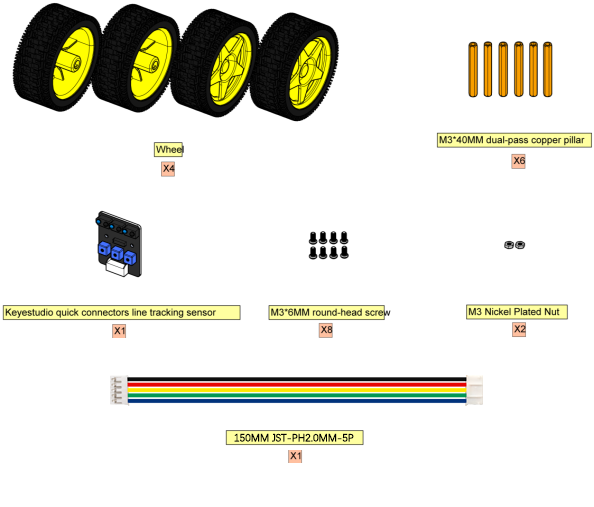
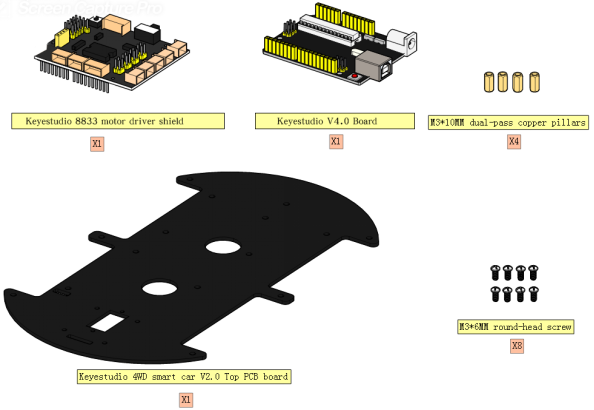
1.1. 必要な部品
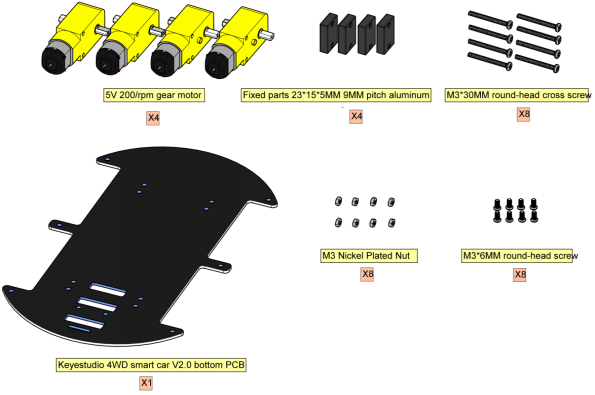
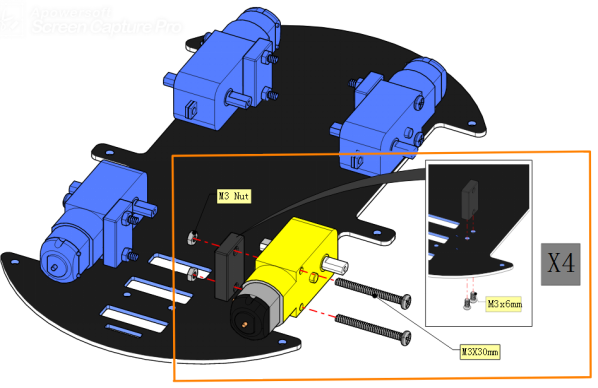
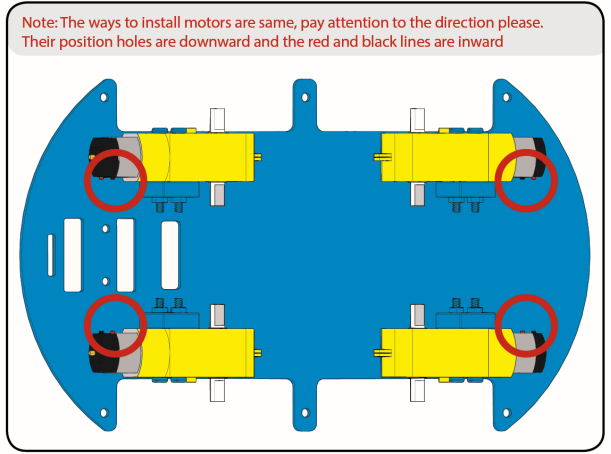
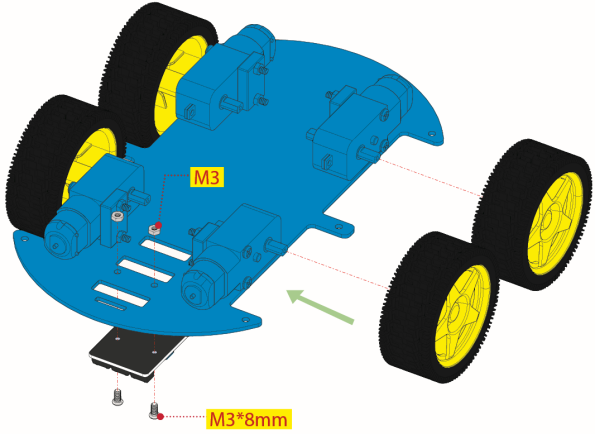
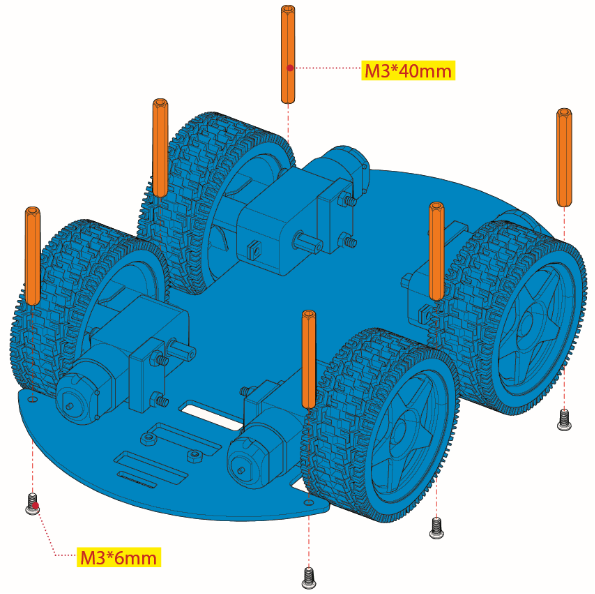
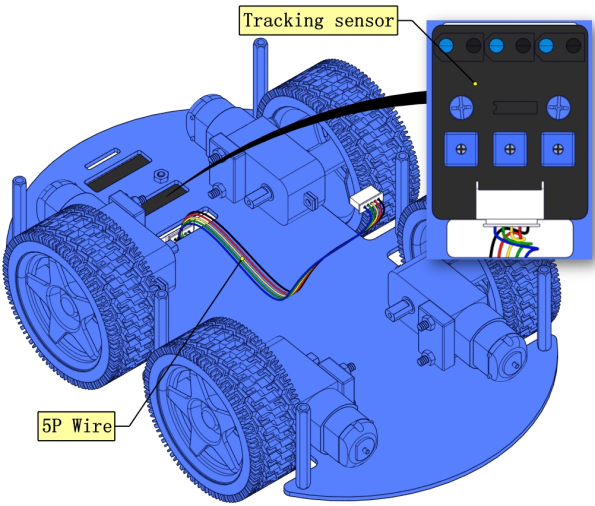
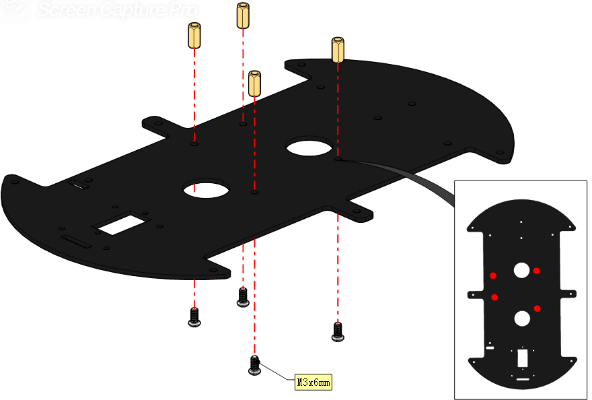
1.2. 取り付け図
1.3. プロトタイプ
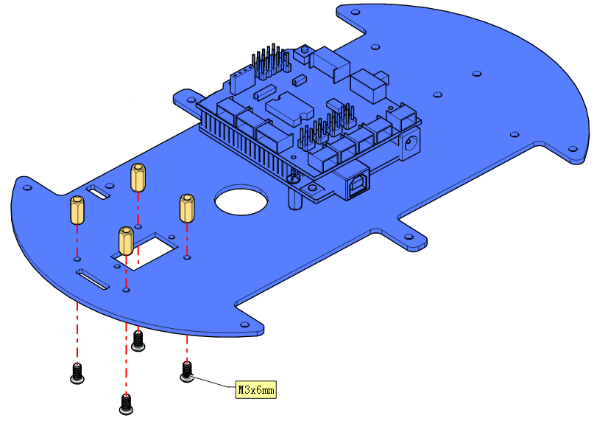
パート 2
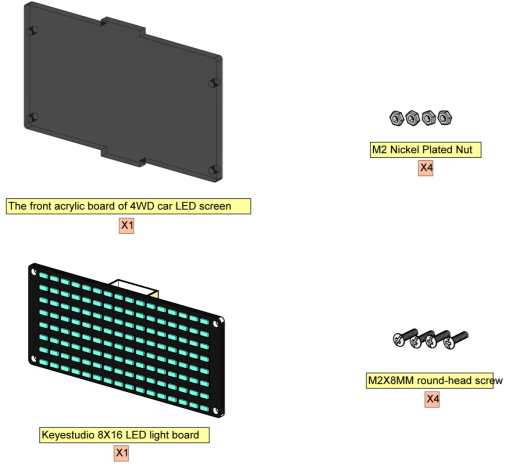
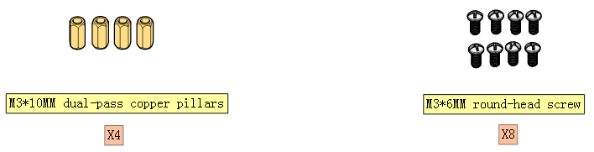
2.1. 必要な部品
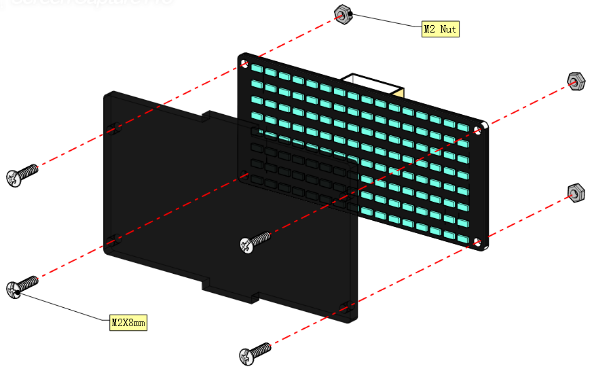
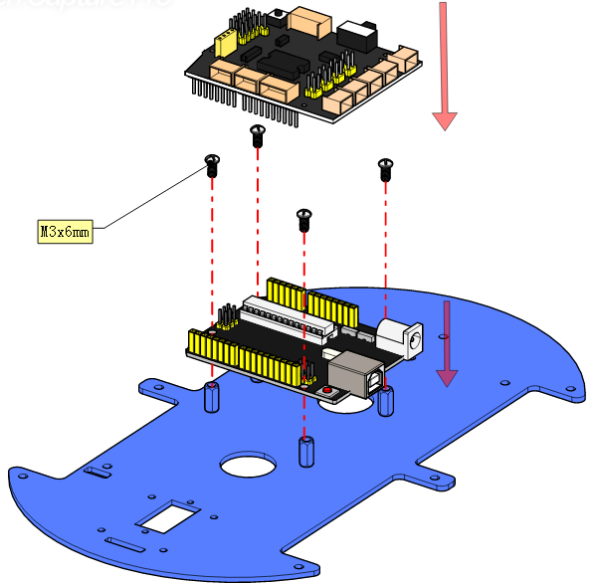
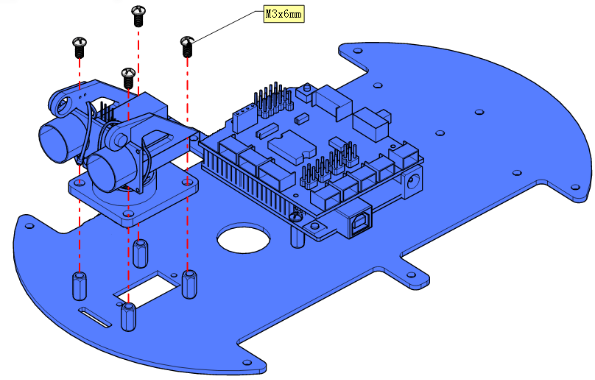
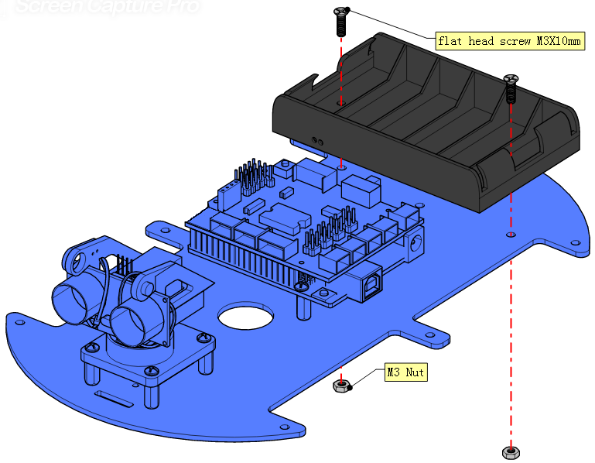
2.2. 取り付け図
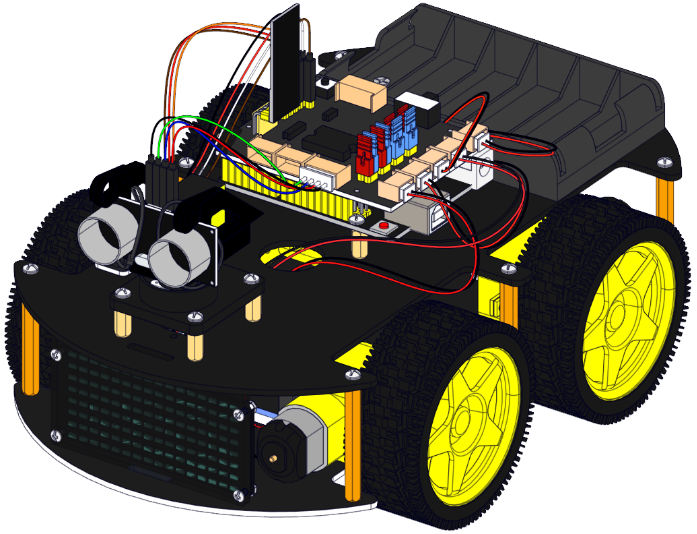
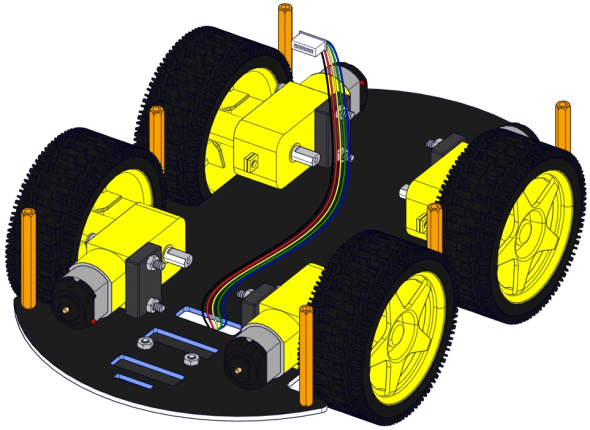
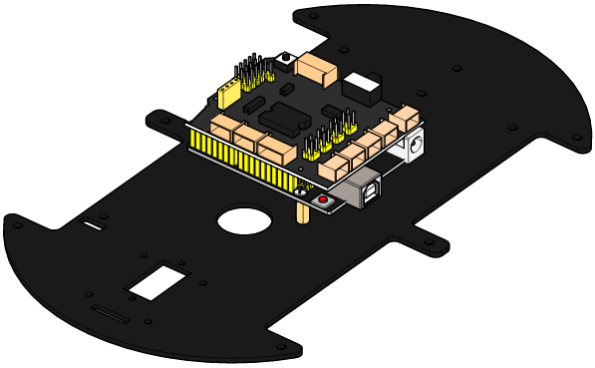
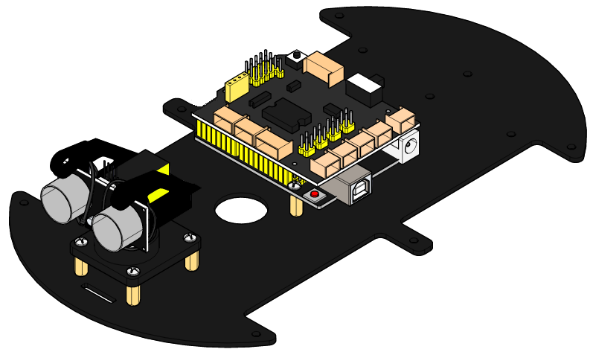
2.3. プロトタイプ
パート 3
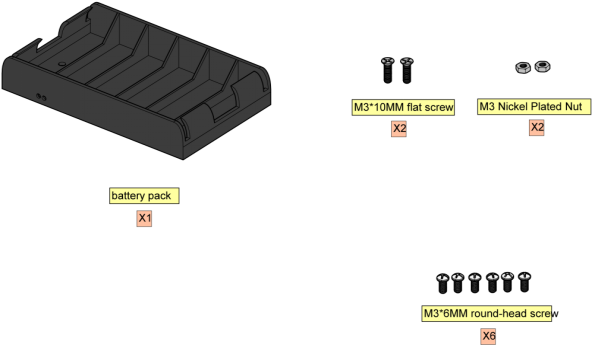
3.1. 必要な部品

3.2. 取り付け図
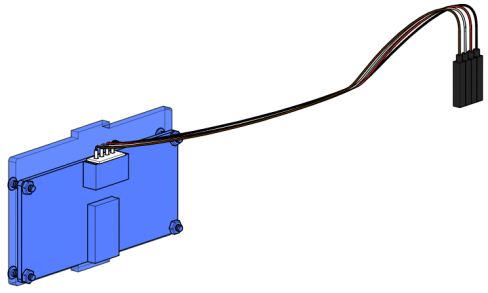
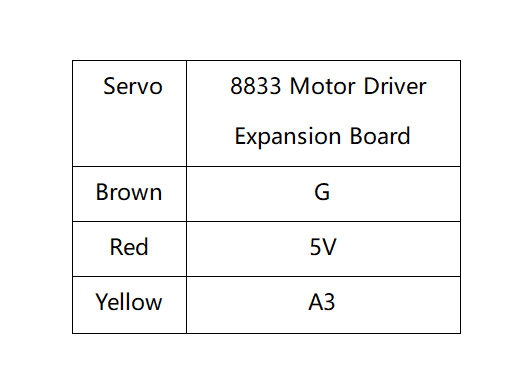
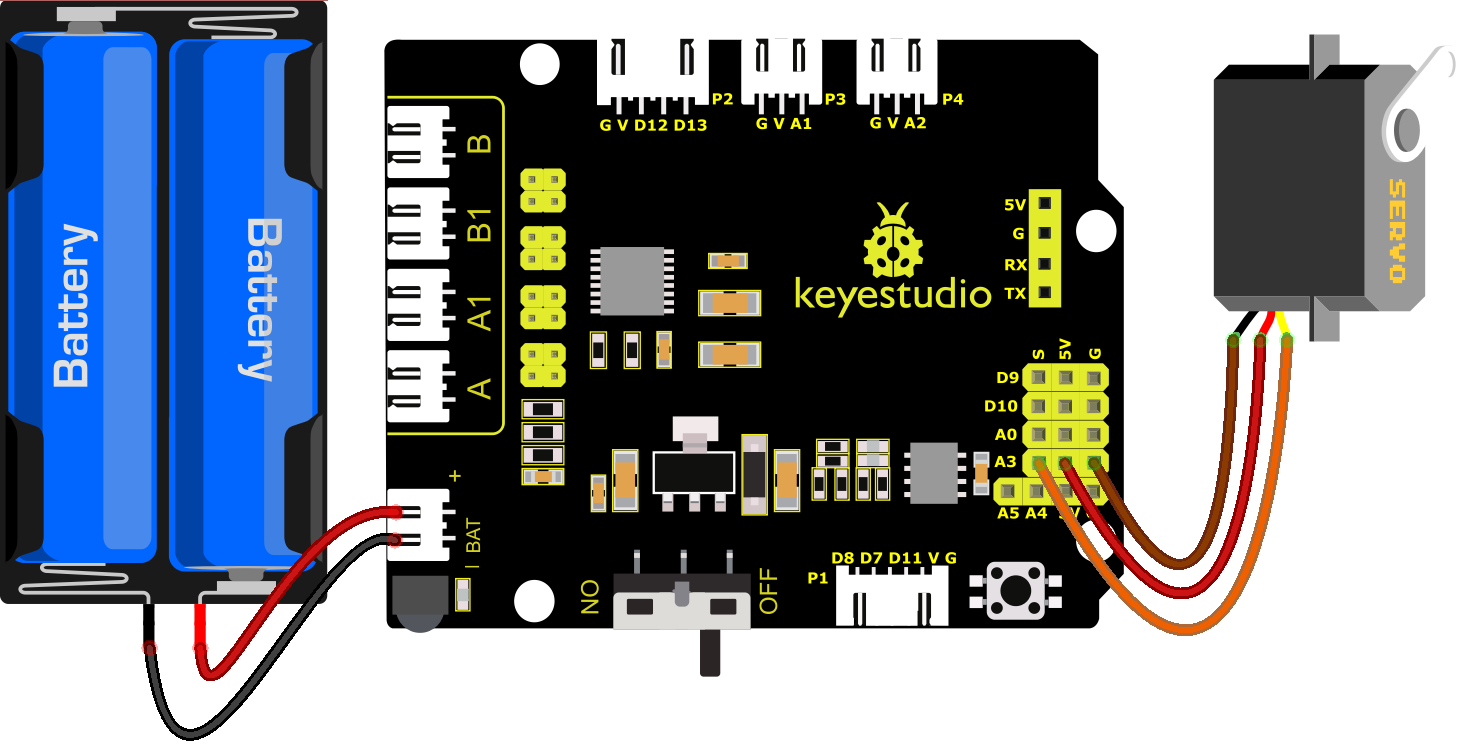
3.3. プラグ配線
3.4. プロトタイプ
パート 4
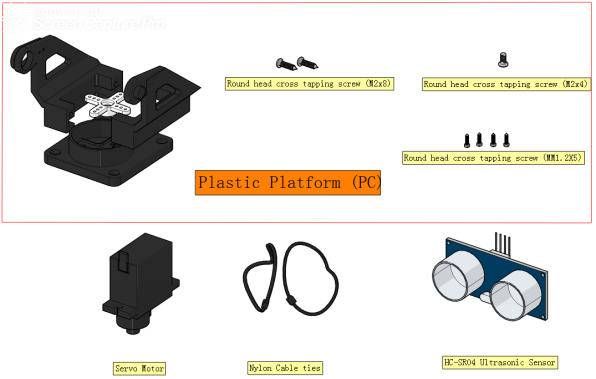
4.1. 必要な部品
4.2. サーボを90度に回転させる
サーボのコードを調整するには、コースに応じて選択してください。
Arduino: コードファイルをダウンロード:Arduino
Kidsblock: コードファイルをダウンロード:Kidsblock

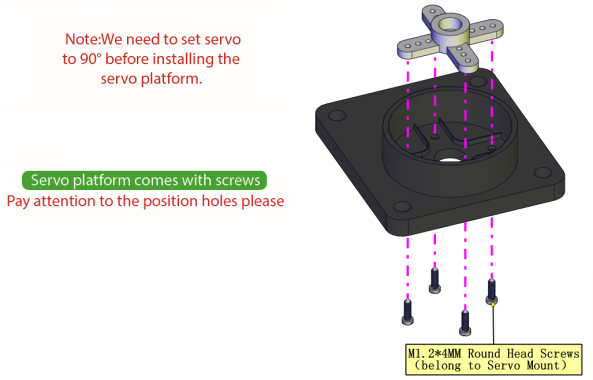
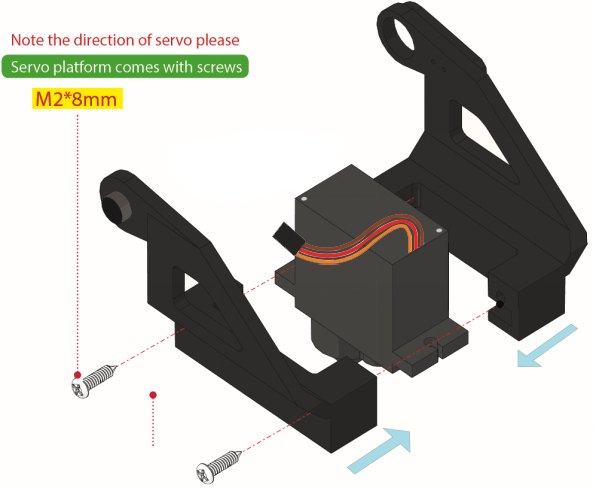
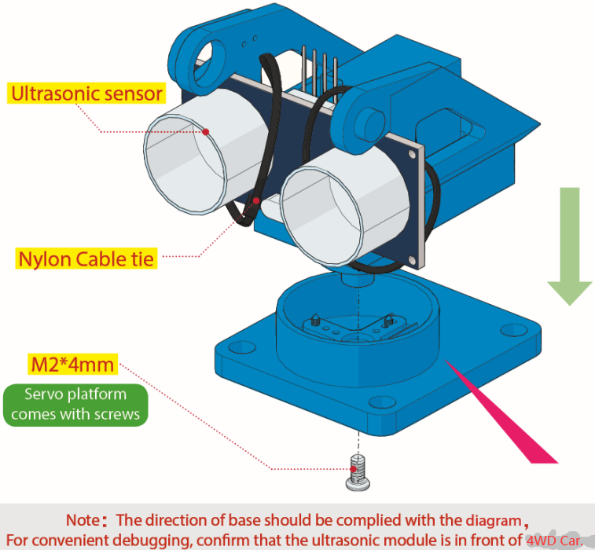
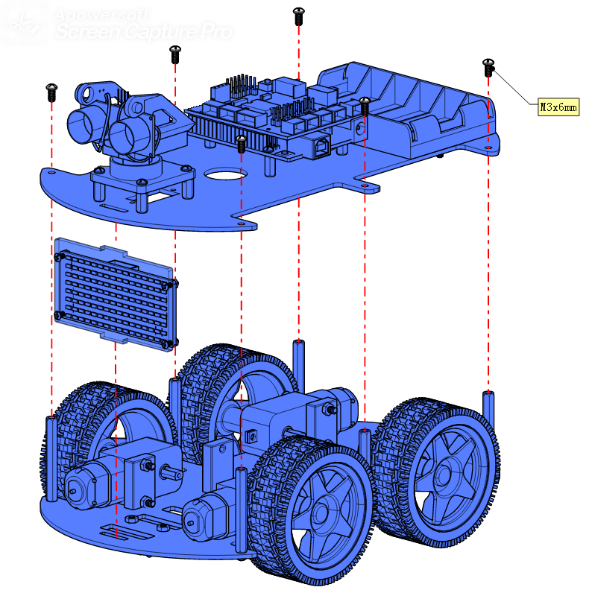
4.3. 取り付け図
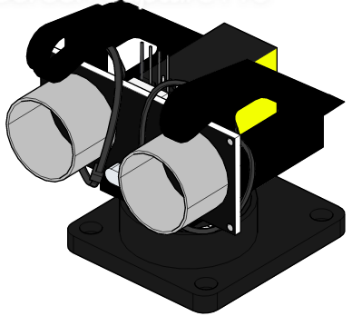
4.4. プロトタイプ
パート 5
5.1. 必要な部品
5.2. 取り付け図
5.3. プロトタイプ
パート 6
6.1. 必要な部品
6.2. 取り付け図
6.3. プロトタイプ
パート 7
7.1. 必要な部品
7.2. 取り付け図
7.3. プロトタイプ
パート 8
8.1. 配線図
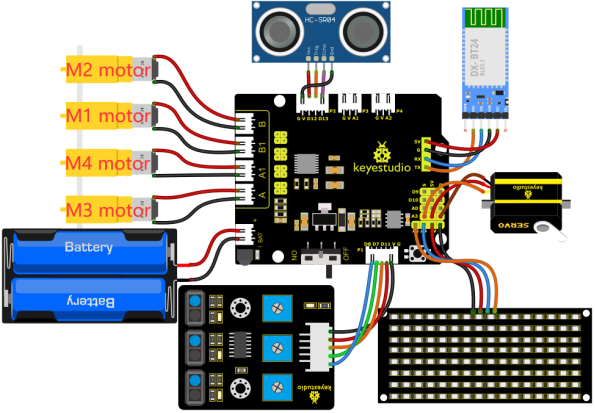
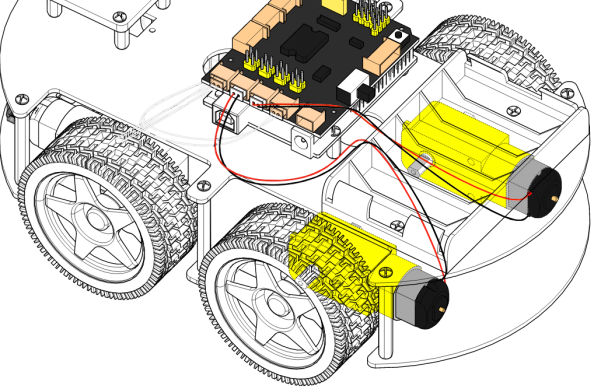
8.2. M2モーターはBインターフェースに接続、M3モーターはAインターフェースに接続。
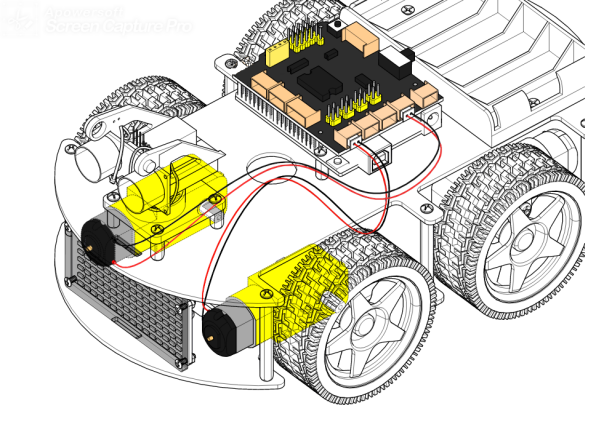
8.3. M1モーターはB1インターフェースに接続、M4モーターはA1インターフェースに接続。
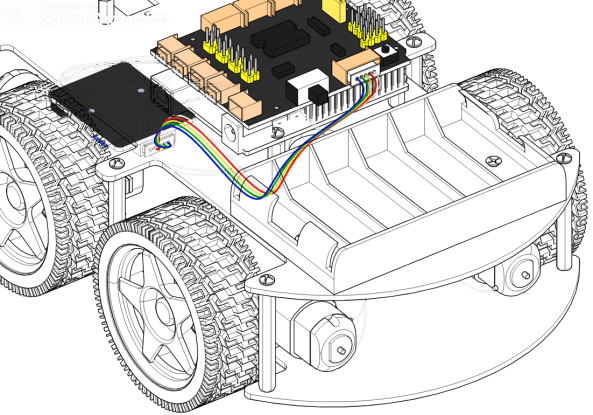
8.4. 3チャンネルライン追跡センサーの配線。
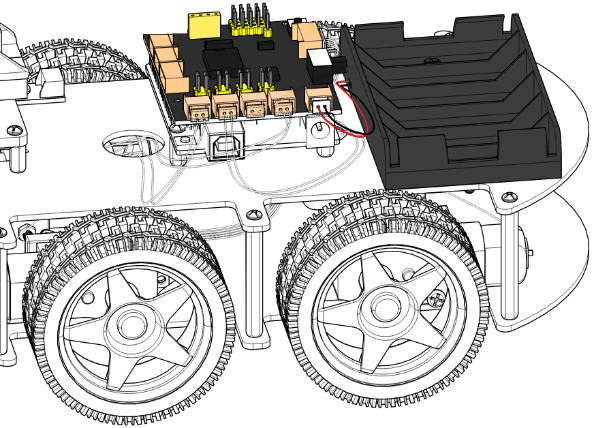
8.5. 電源はBATに接続。
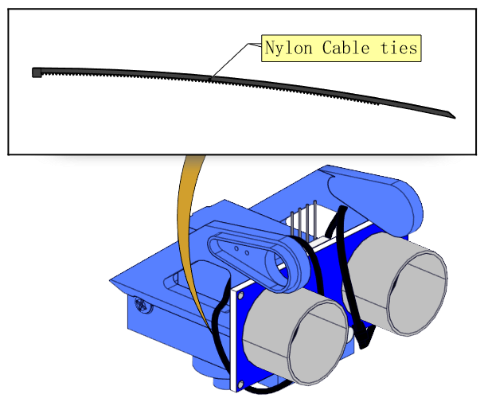
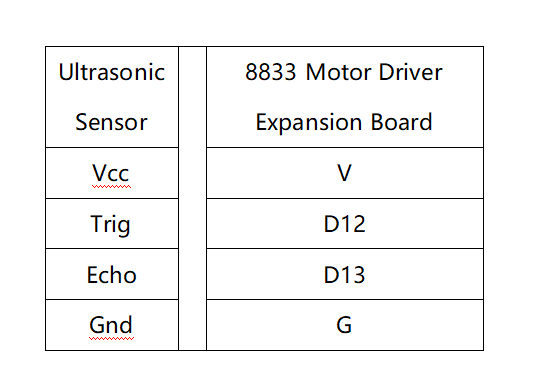
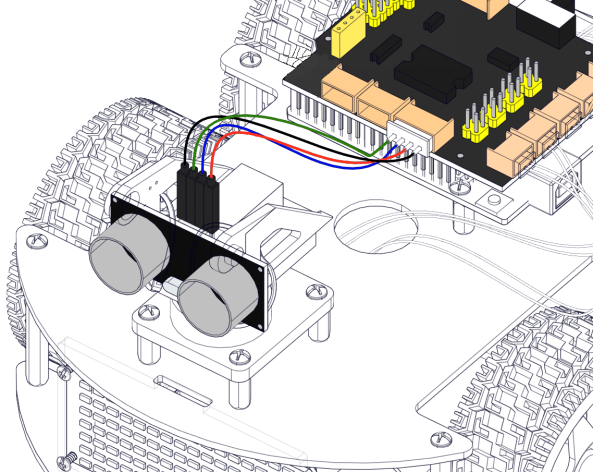
8.6. 超音波センサーの配線。
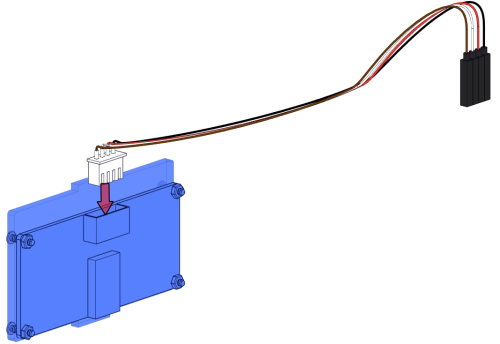
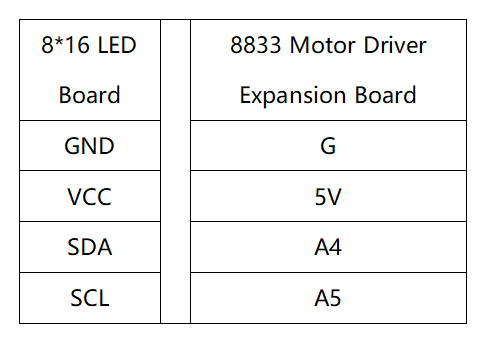
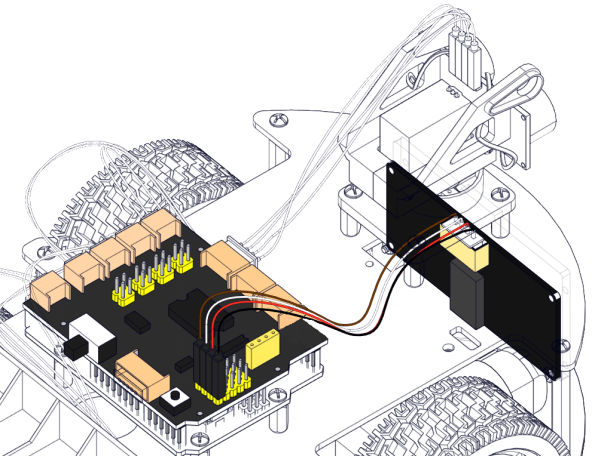
8.7. 8*16 LEDボードの配線。
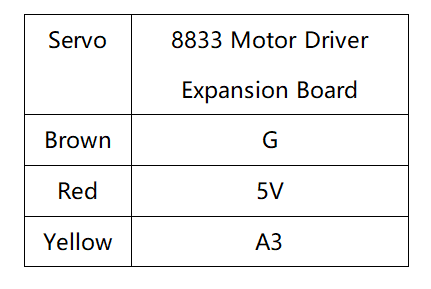
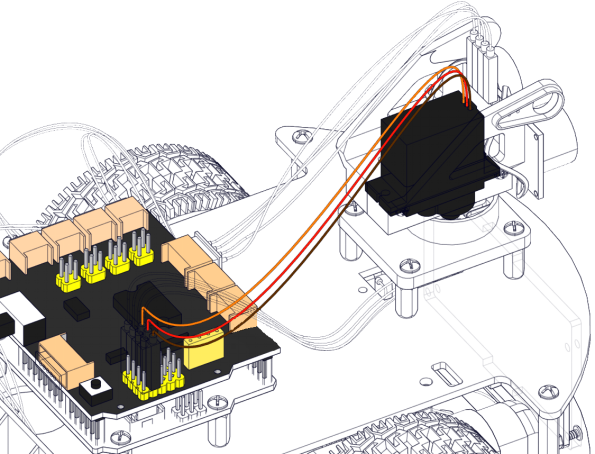
8.8. サーボの配線。
8.9. Bluetoothモジュールとジャンパーキャップを差し込む。
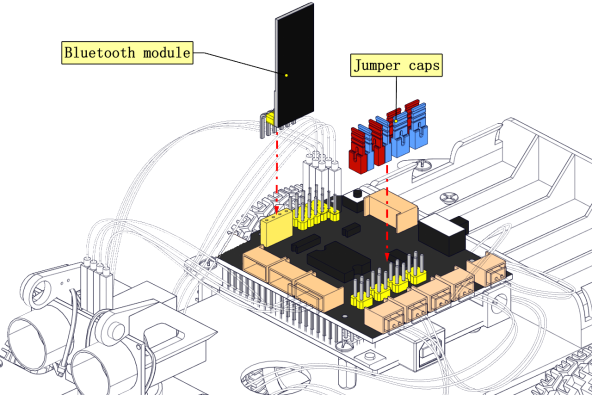
注意: テストコードをアップロードする前にBluetoothモジュールを取り外す必要があります。そうしないとコードのアップロードに失敗します。コードのアップロードが成功した後にBluetoothモジュールを接続してください。
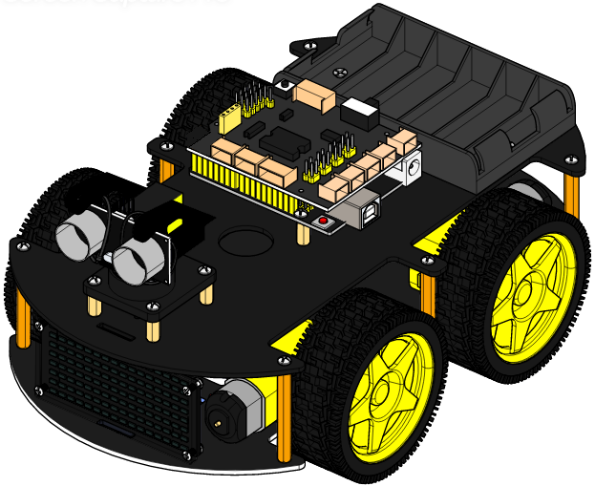
8.10. 完成したプロトタイプ