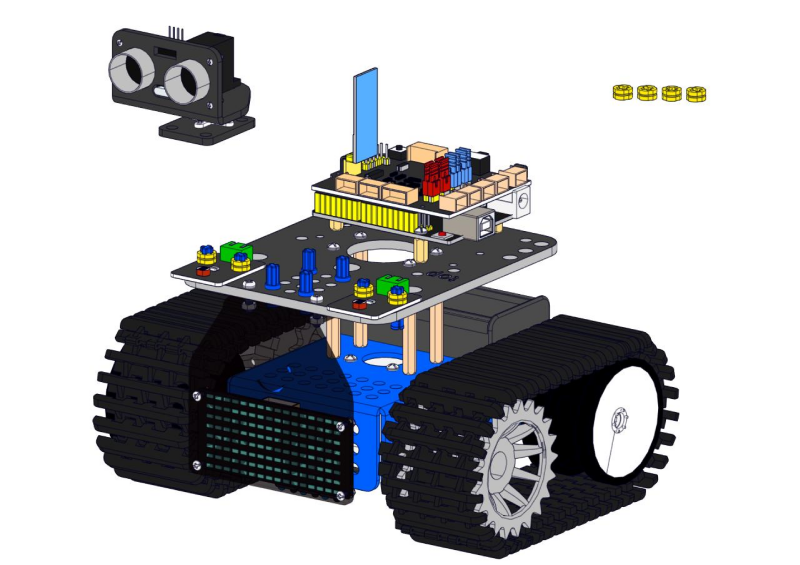
2. Produktinstallation
Vorsicht: Stellen Sie den Anfangswinkel des Servos ein und entfernen Sie Schutzfolien von den Platinen, bevor Sie diesen Roboter installieren.

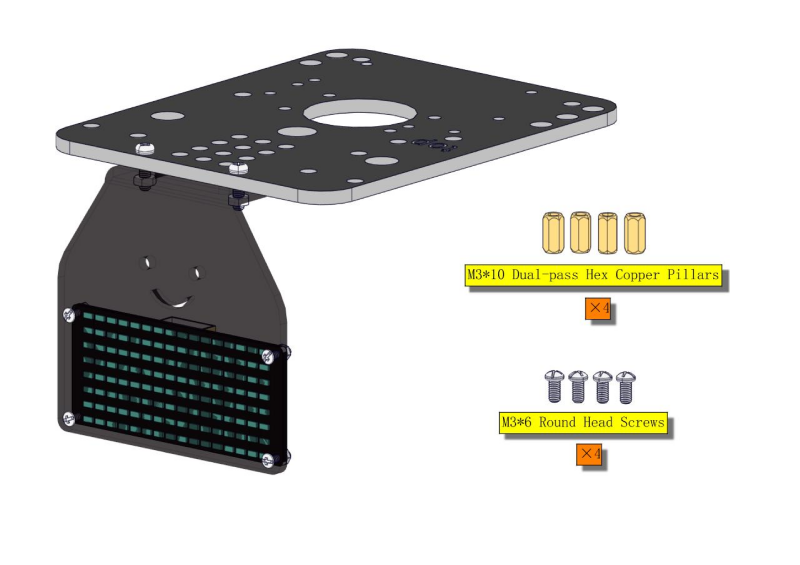
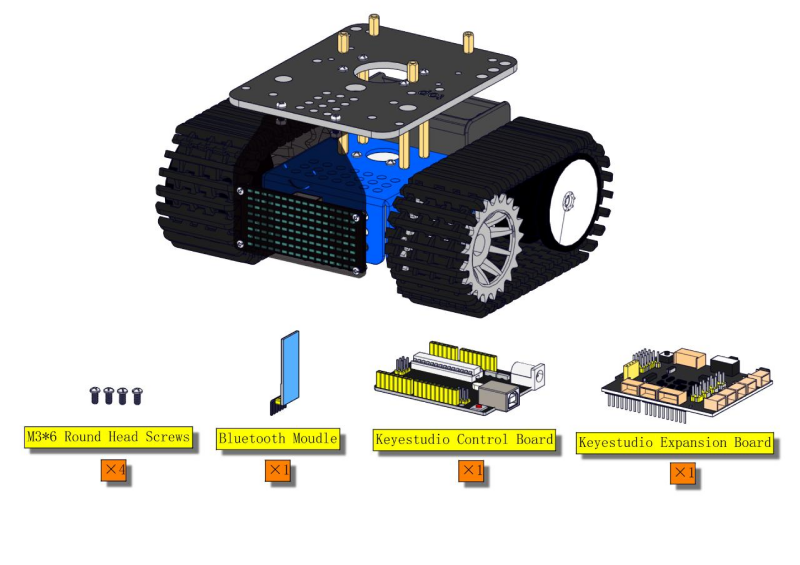
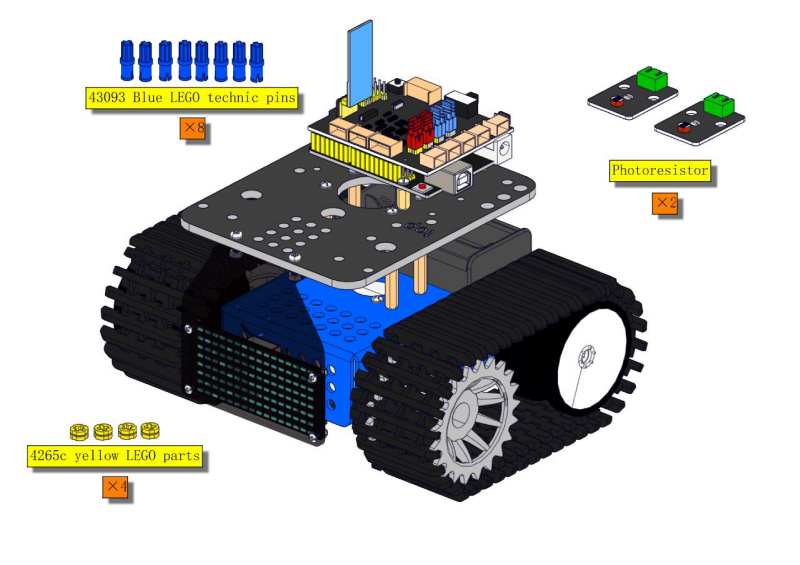
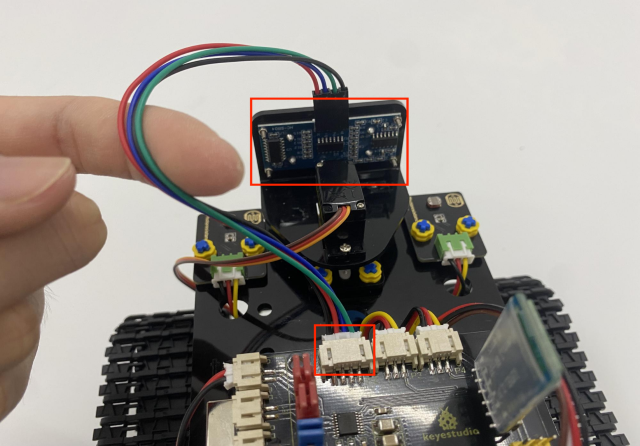
Schritt 1

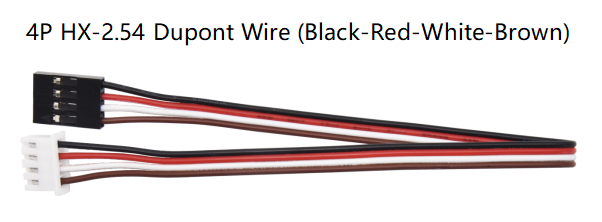
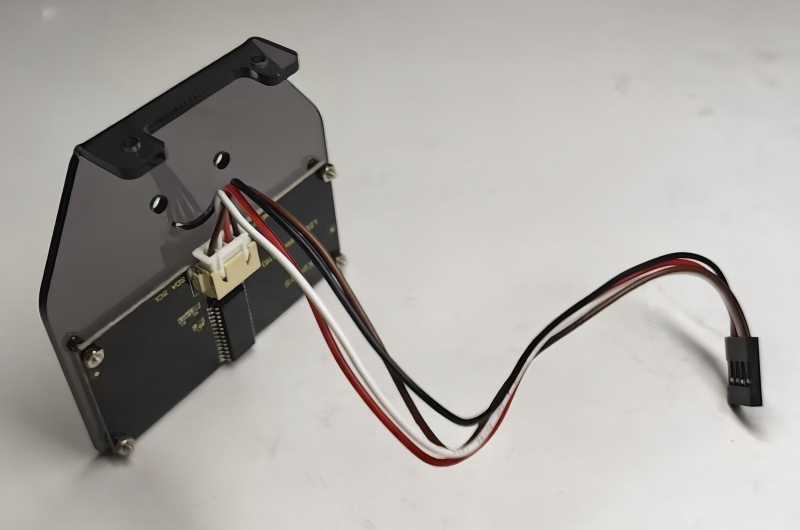
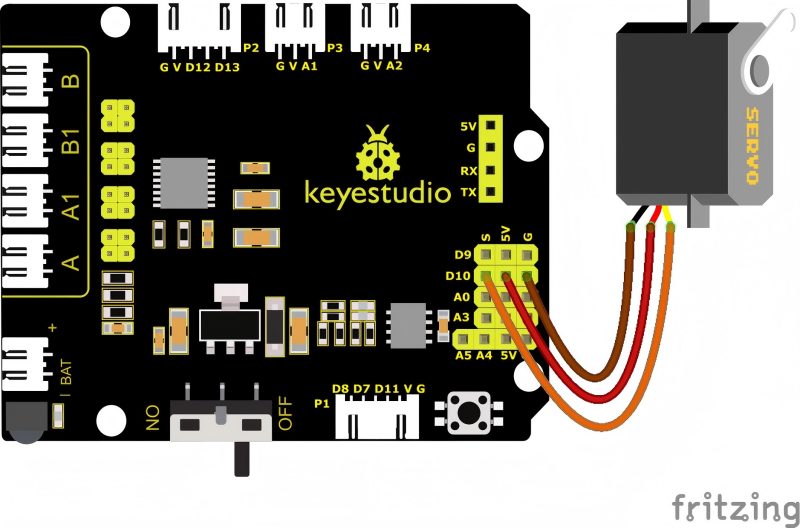
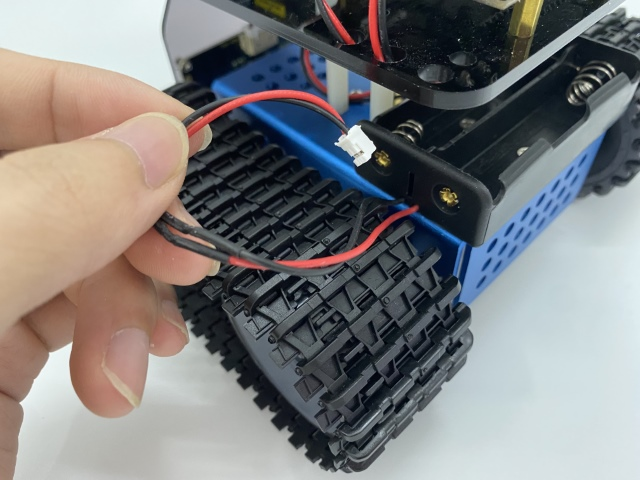
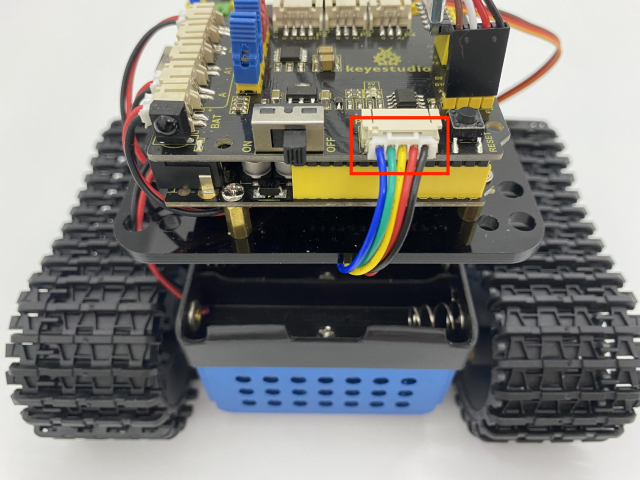
Bitte zuerst die Kabel anschließen.
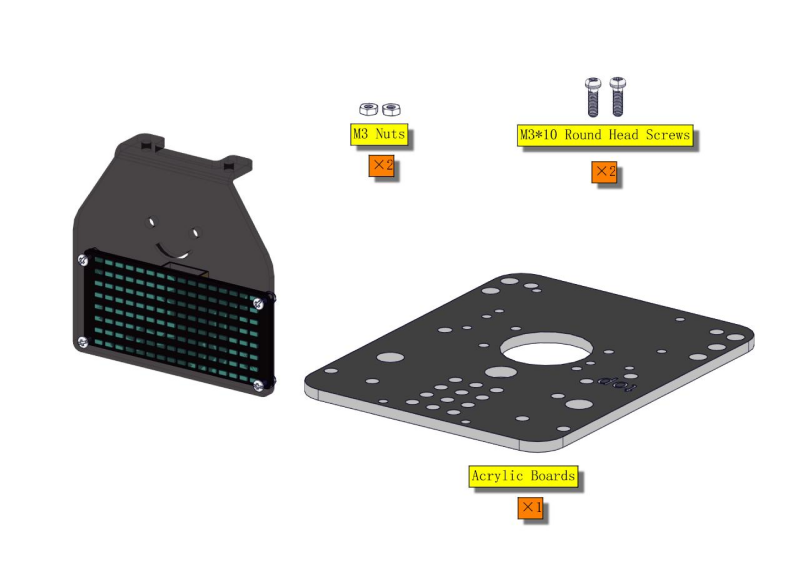
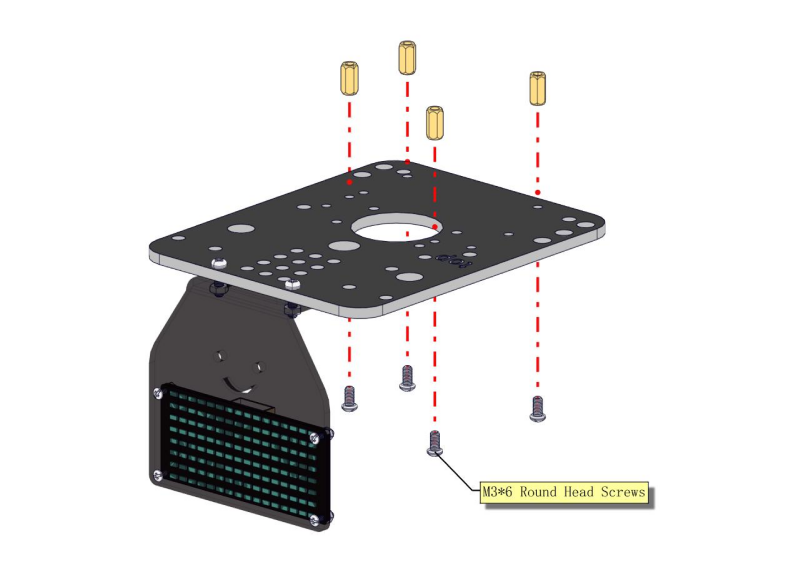
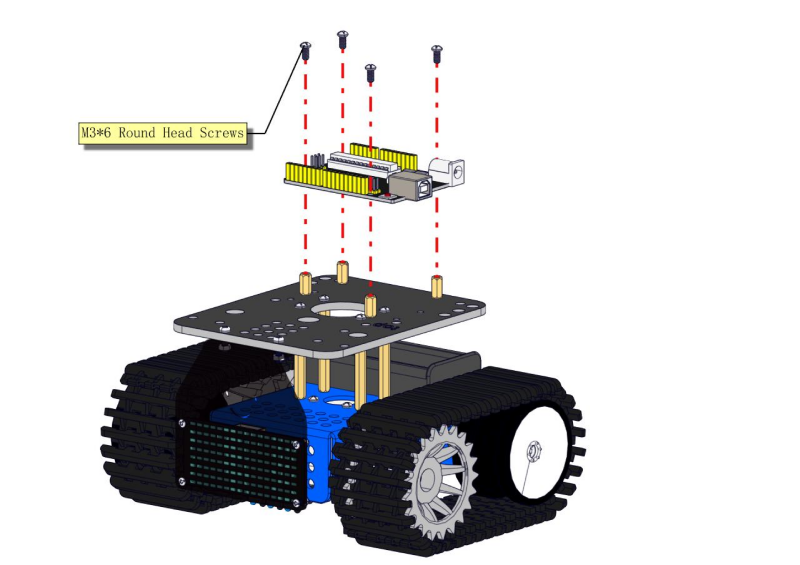
Schritt 2
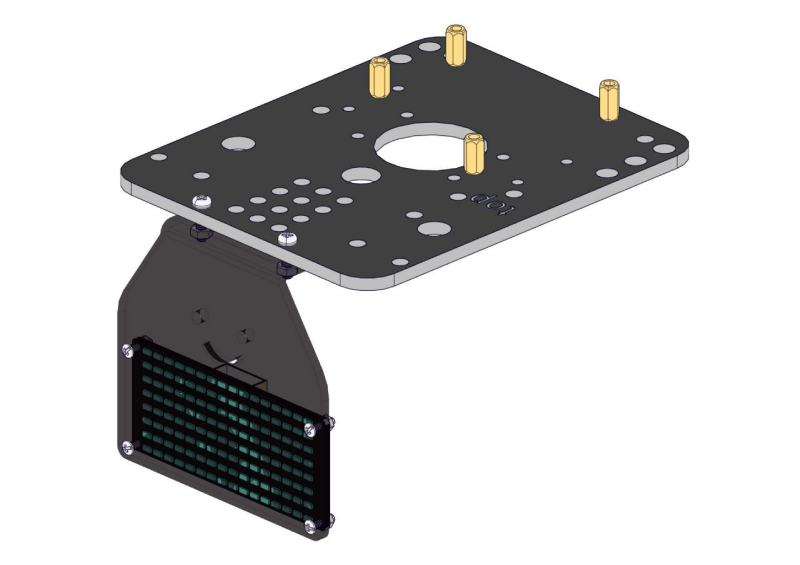
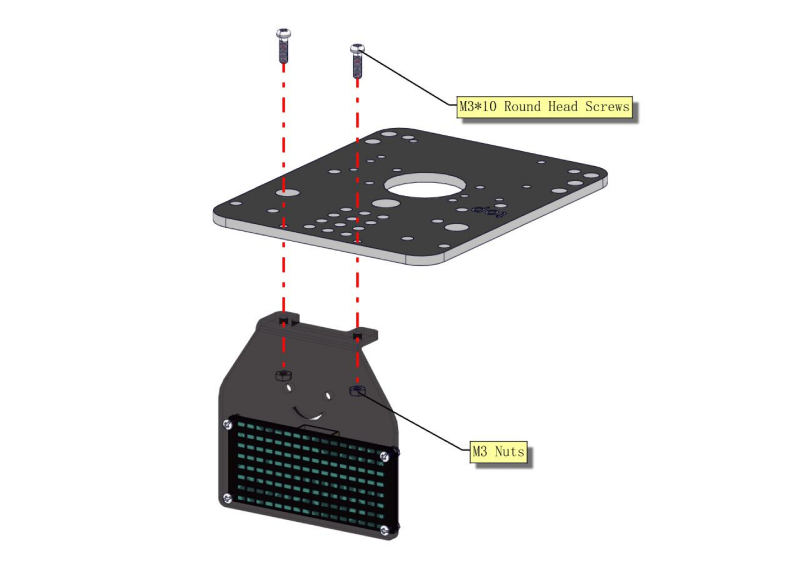
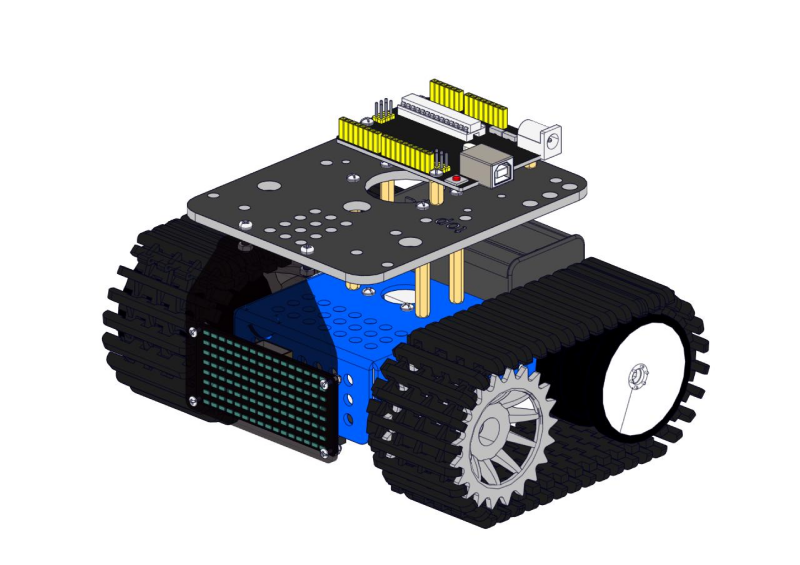
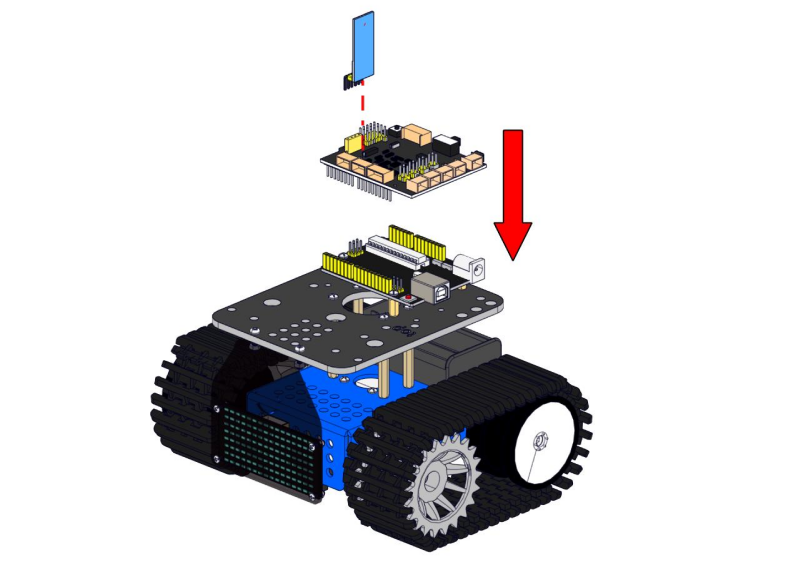
Schritt 3

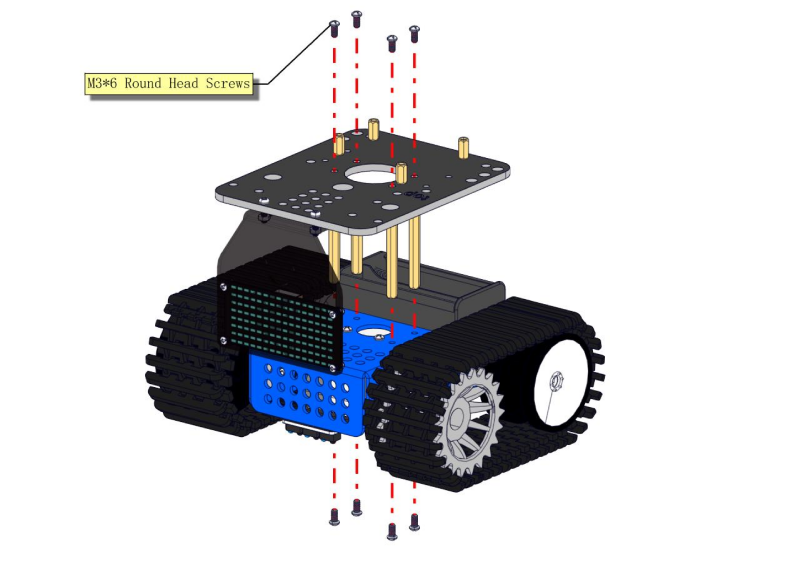
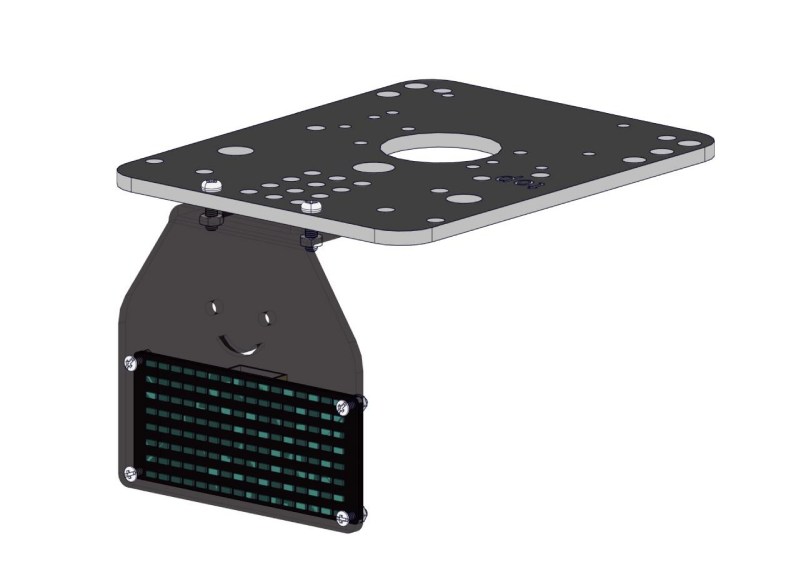
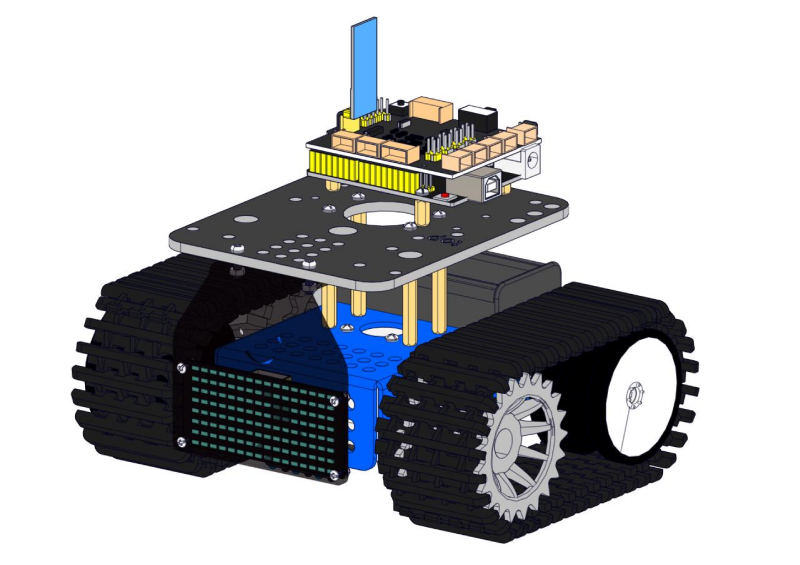
Schritt 4
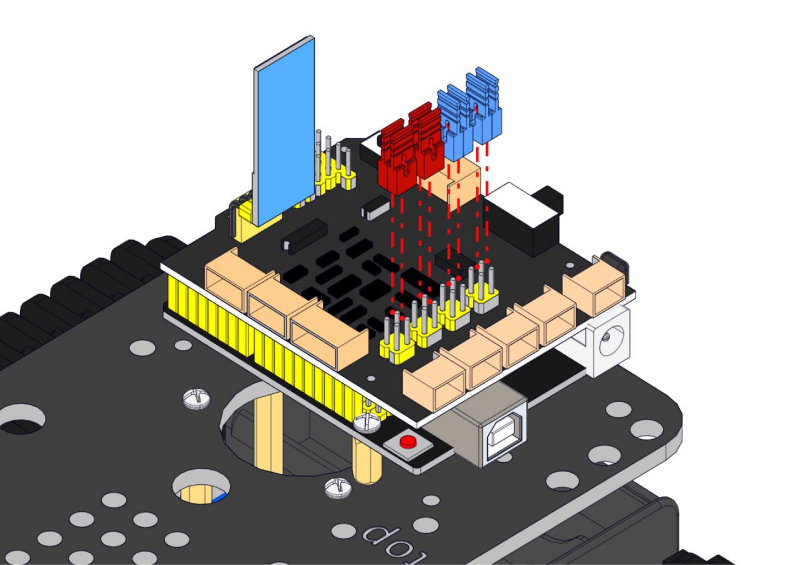
Schritt 5
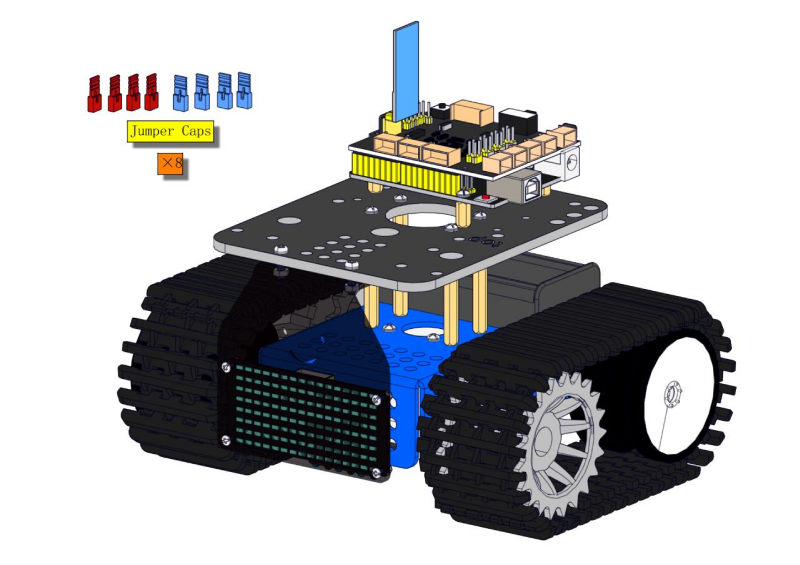
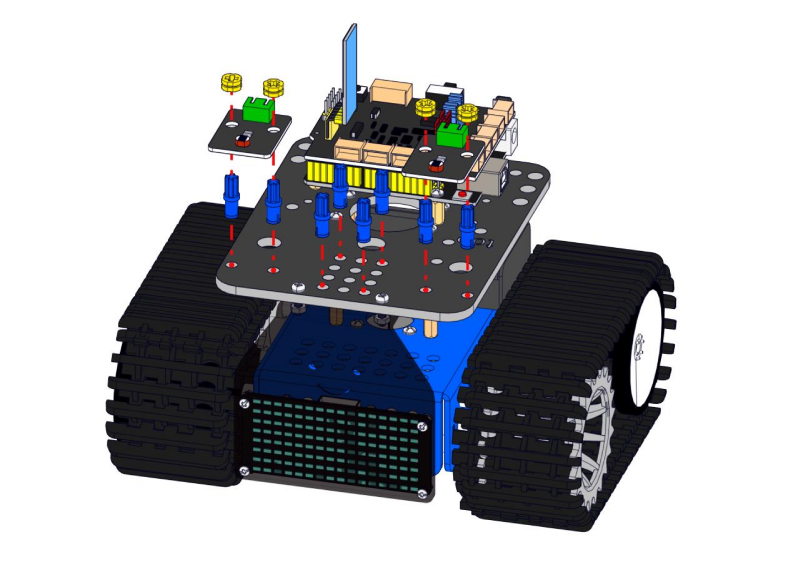
Achten Sie auf die Richtung der Jumper-Kappen.
Schritt 6
Schritt 7
Schritt 8
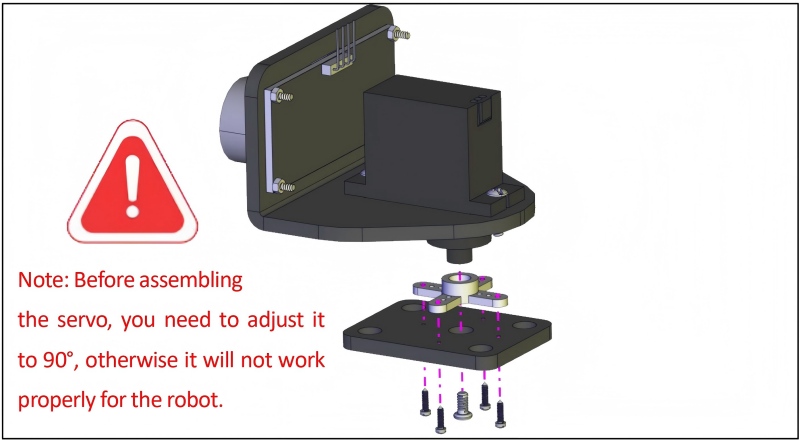
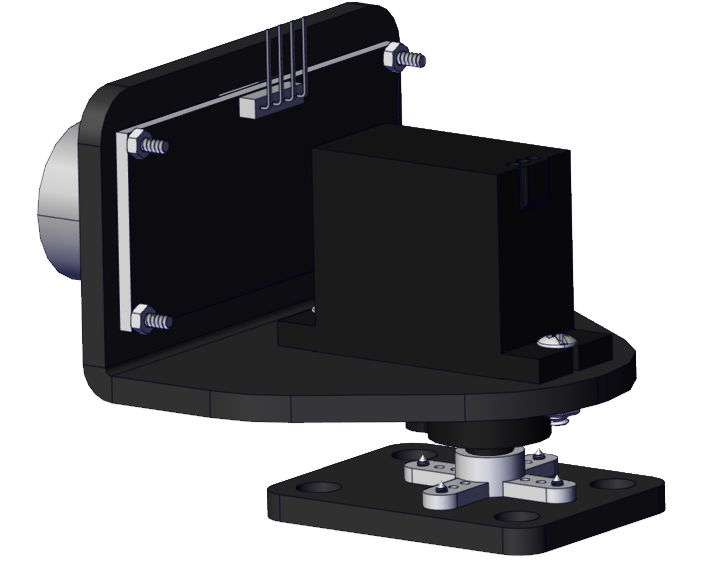
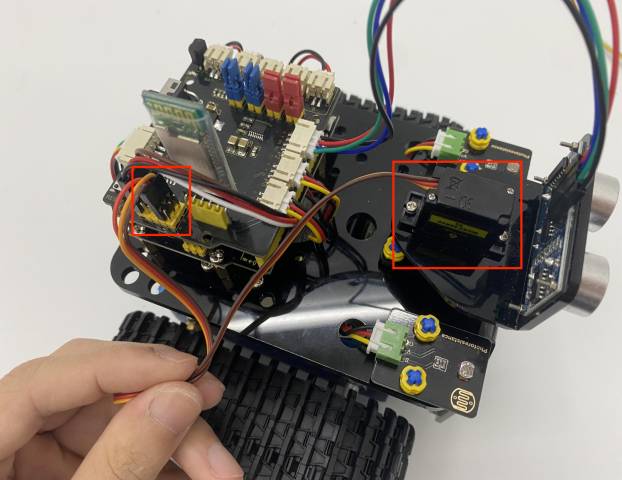
(Der Winkel des Servos muss eingestellt werden)
Stellen Sie den Winkel des Servos auf 90° ein
Um den Code des Servos anzupassen, wählen Sie bitte entsprechend dem Kurs aus.
1.Arduino: Laden Sie die Code-Datei herunter: Arduino
2.Kidsblock: Laden Sie die Code-Datei herunter: Kidsblock
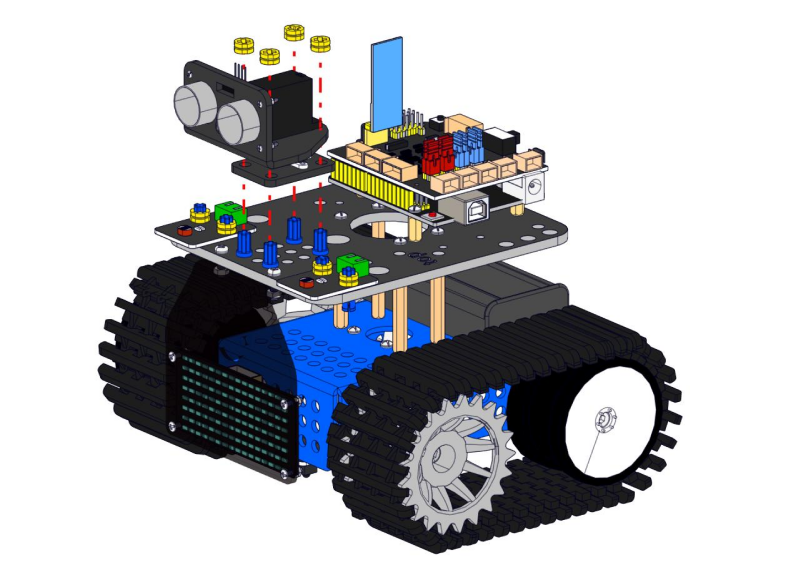
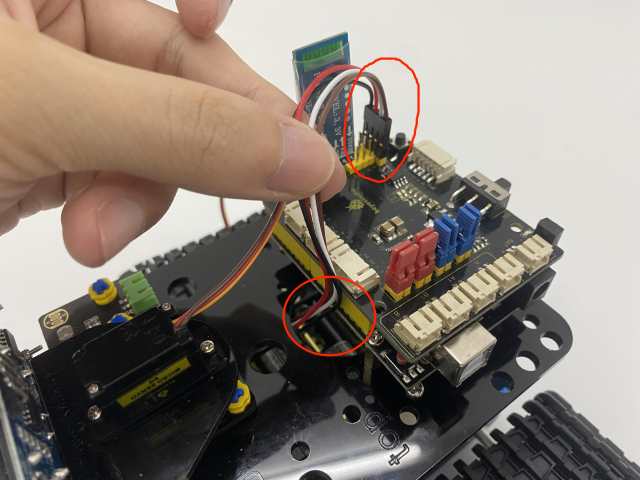
Nach der Initialisierung des Servo-Winkels das Bluetooth-Modul einbauen.
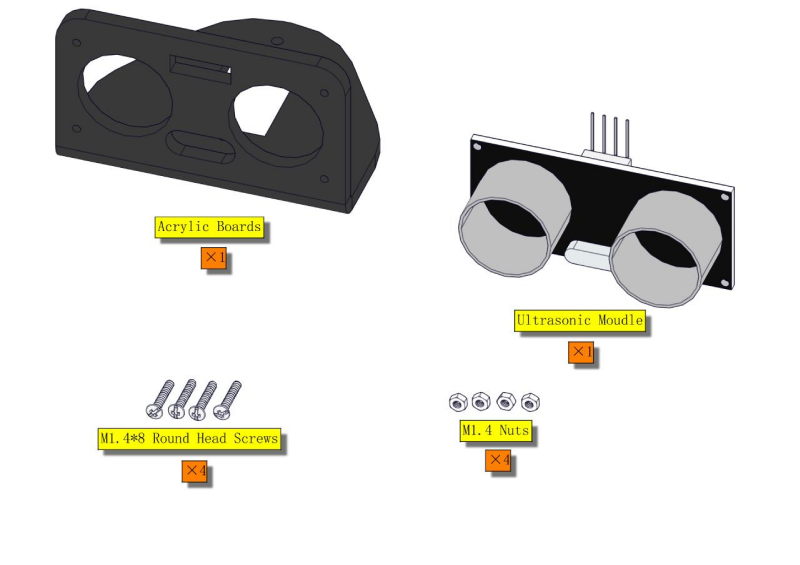
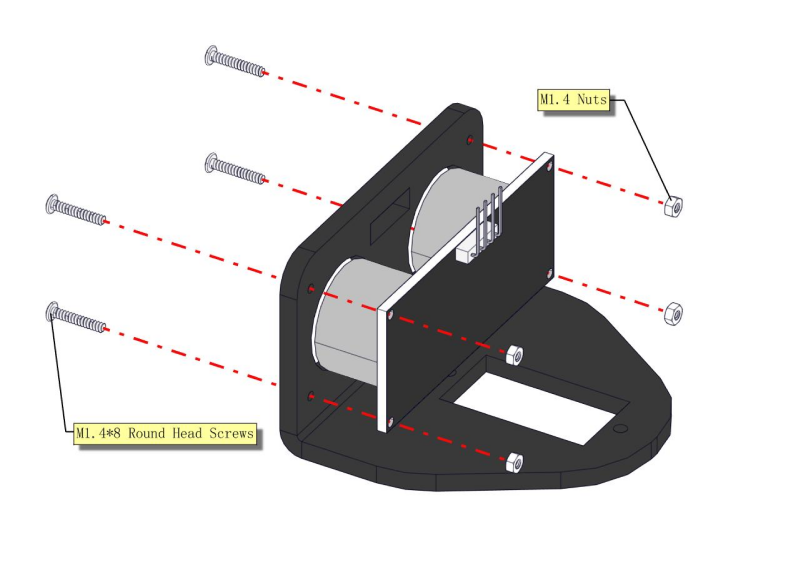
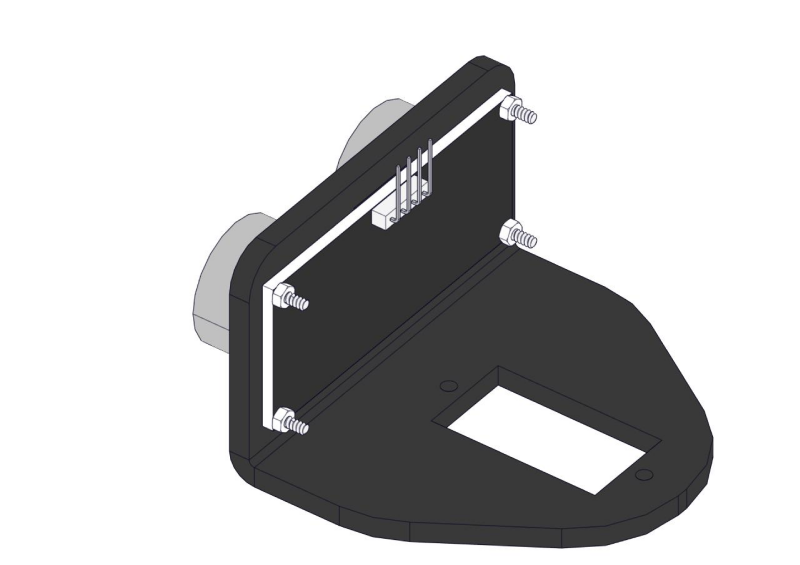
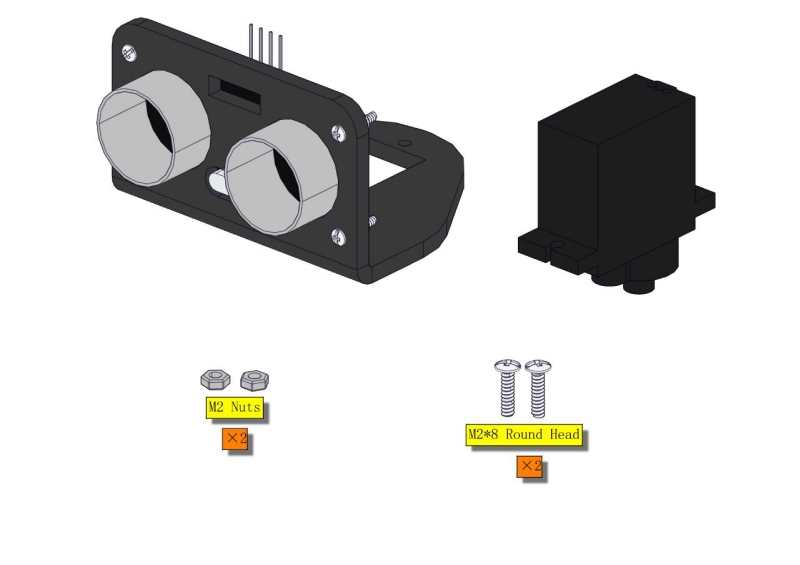
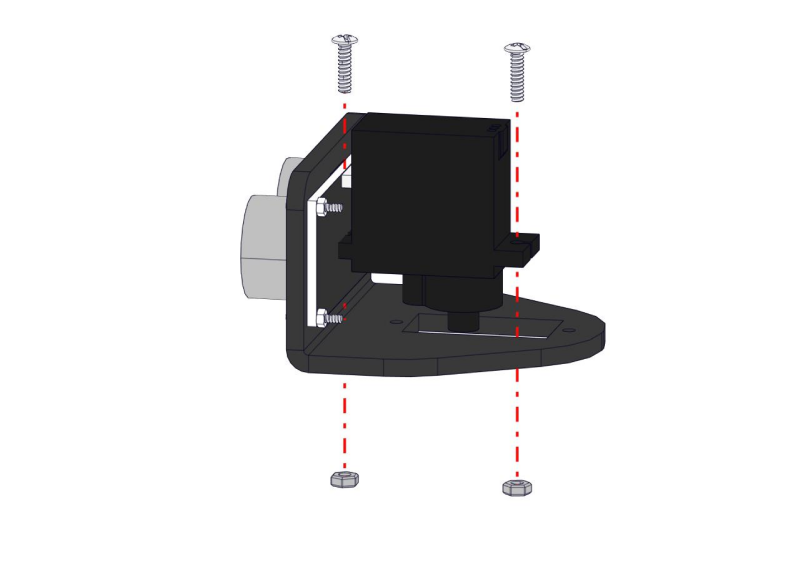
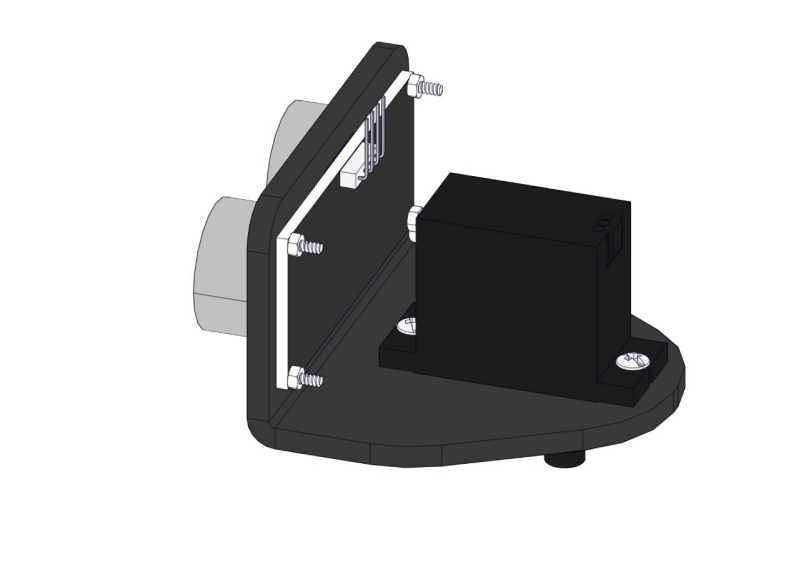
Halten Sie den Ultraschallsensor parallel zur Platine.
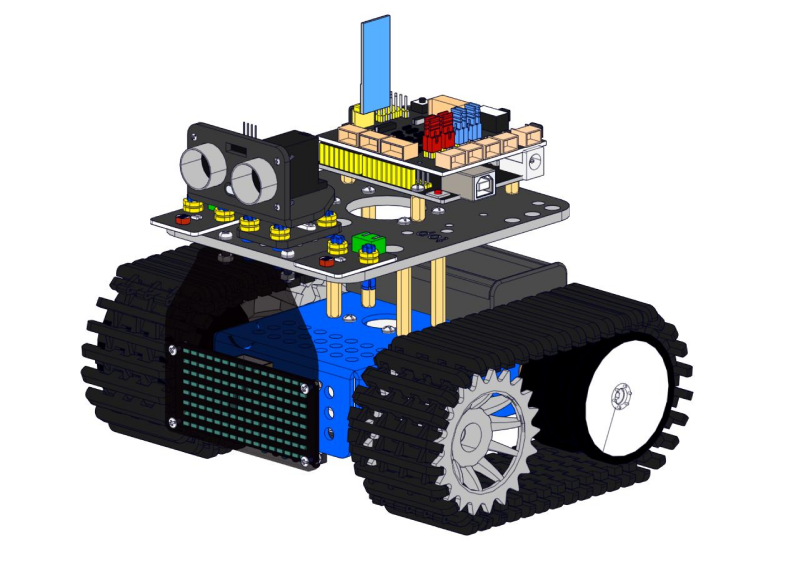
Schritt 9
Schritt 10
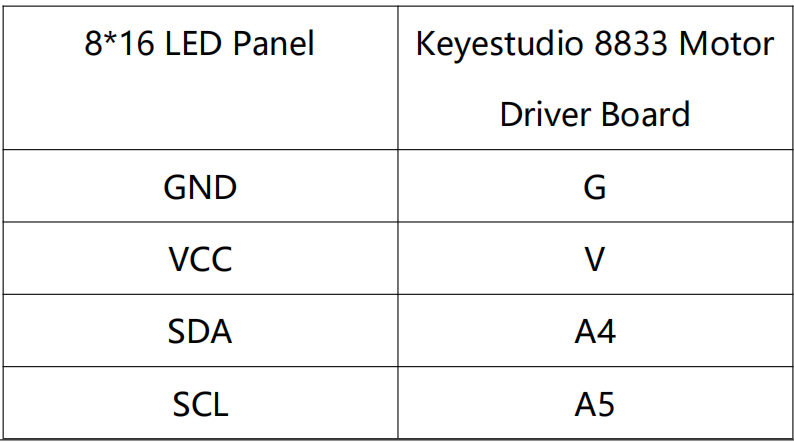
Verkabelung
Für das 8*16 LED-Panel die Kabel mit A4 und A5 verbinden.
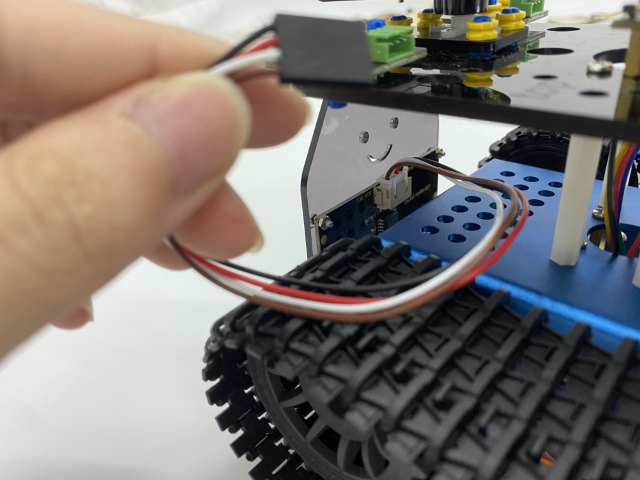
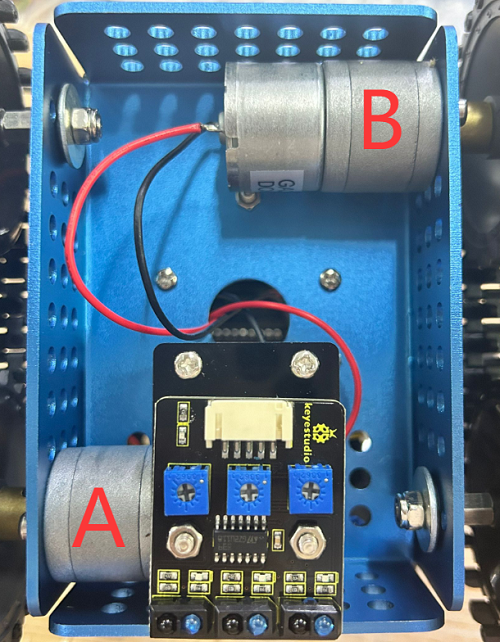
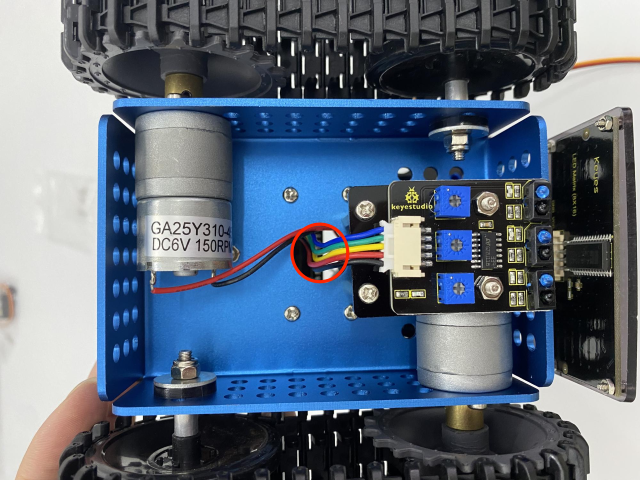
Motor A an Port A und Motor B an Port B anschließen.
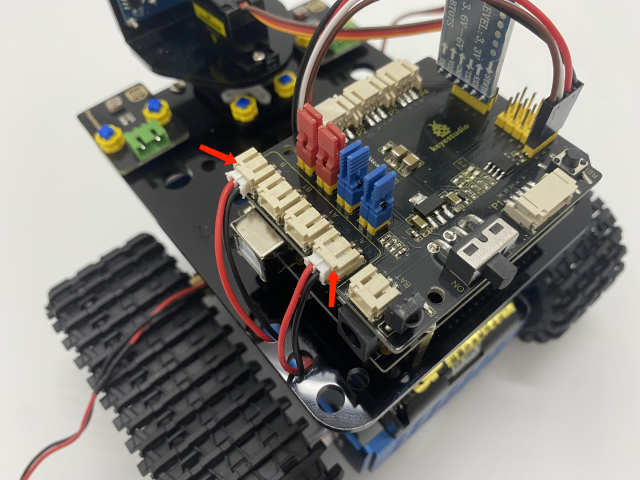
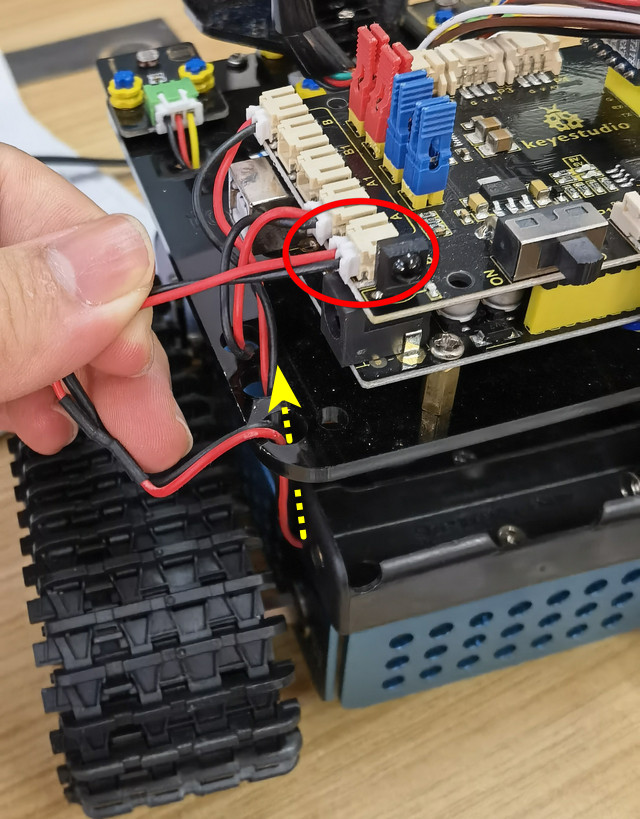
Das Stromversorgungskabel anschließen.
Linienverfolgungssensor (siehe Abbildung)

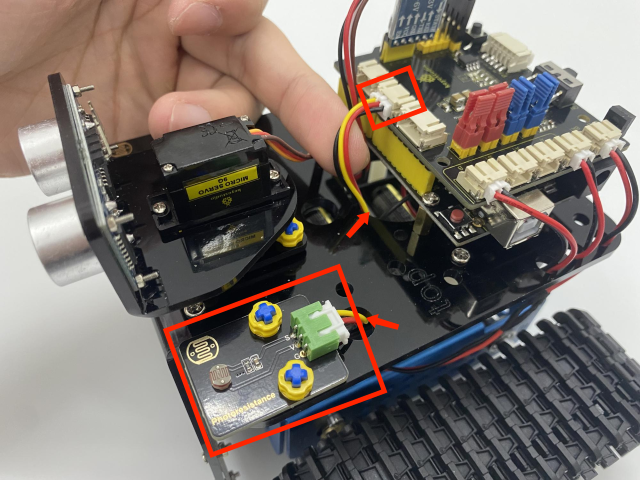
Fotowiderstände anschließen
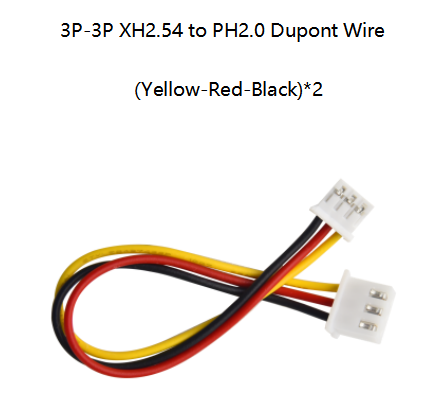
Fotowiderstand |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
Fotowiderstand |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
Ultraschallsensor anschließen.

Ultraschallsensor |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
Servo anschließen (D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Braun |
G |
Rot |
V(5V) |
Orange |
D10 |
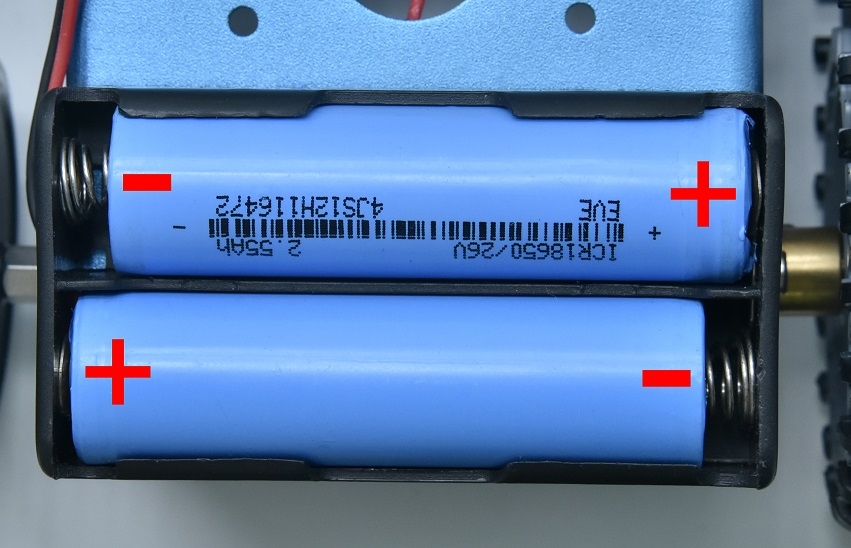
Wir verwenden einen 18650-Lithium-Akku mit einem spitzen Pluspol, dessen Leistung und Kapazität keine besonderen Anforderungen haben.