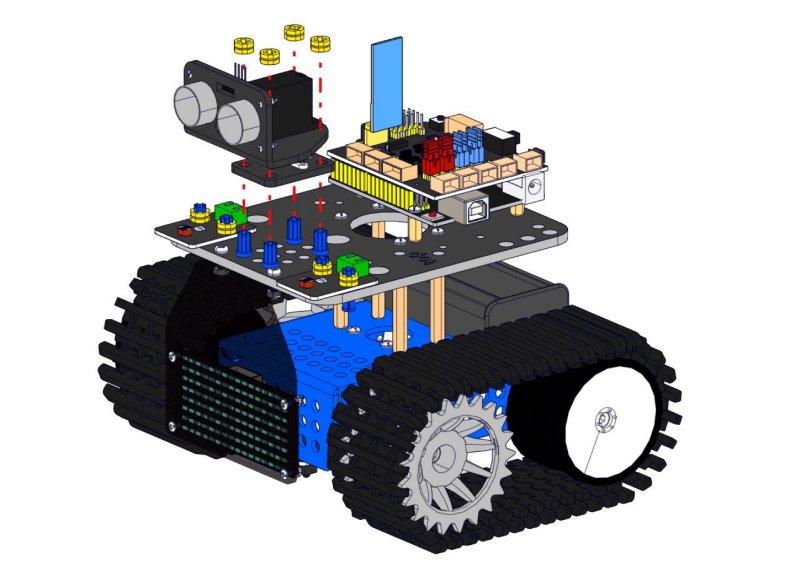
2. Product Installation
Caution: Set the initial angle of the servo Peel thin films off boards before installing this robot .

Step1

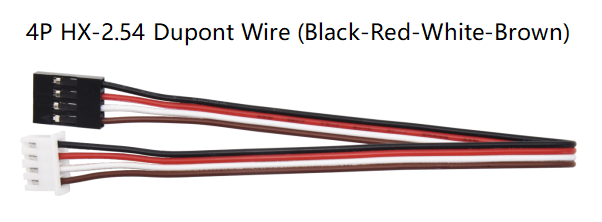
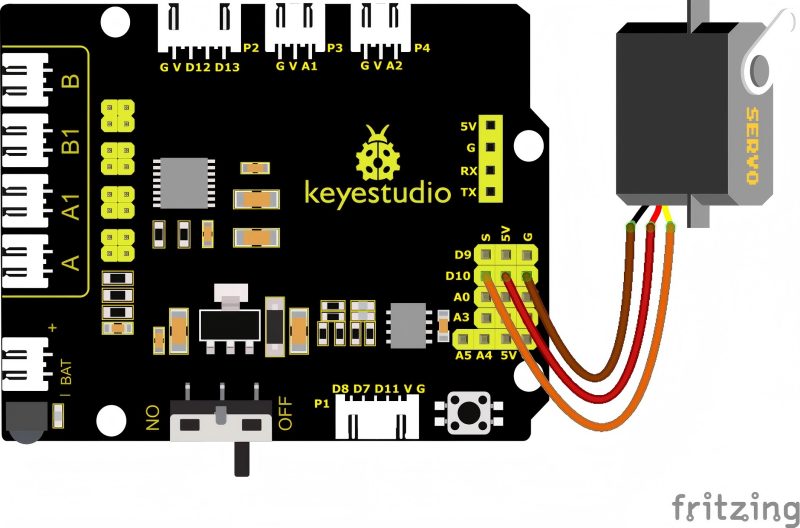
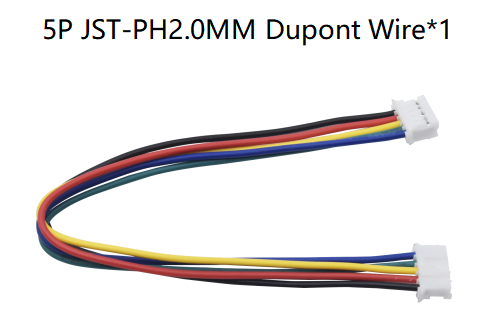
Please wire up first.
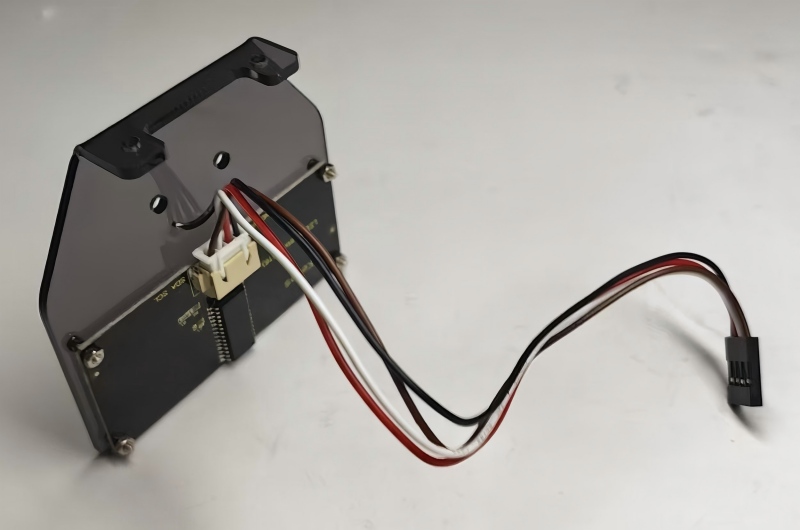
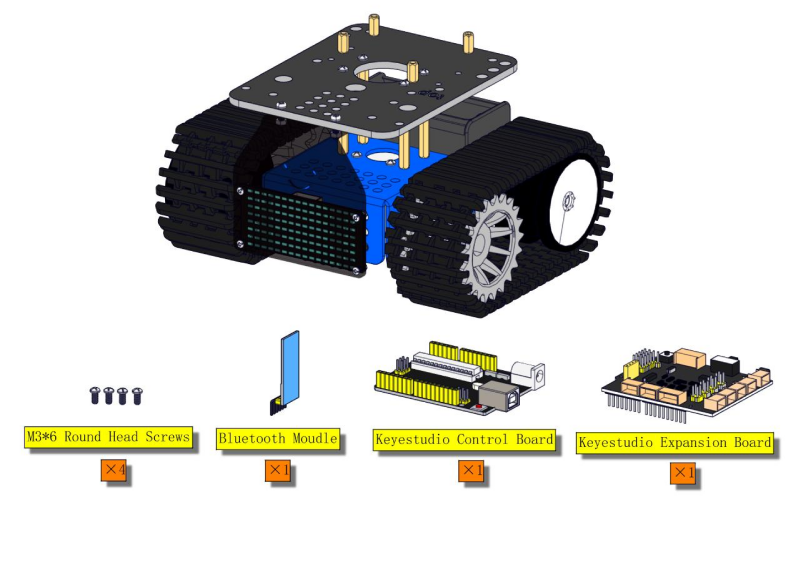
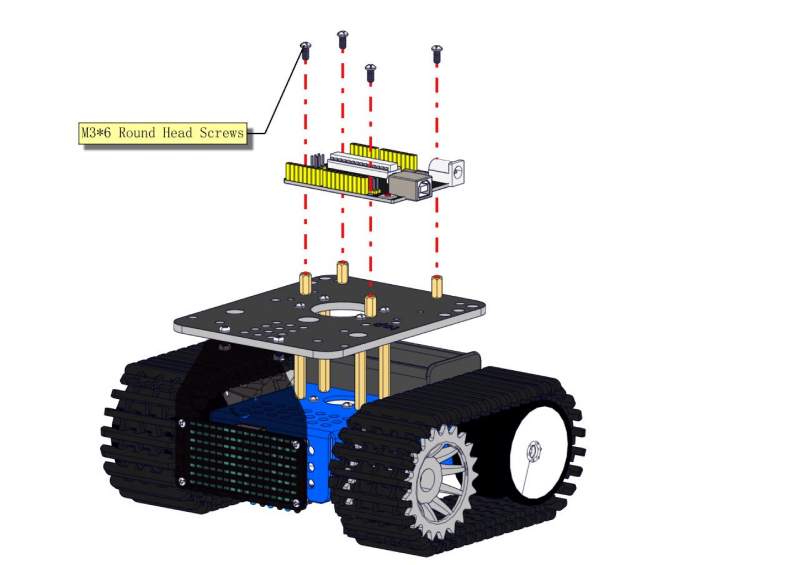
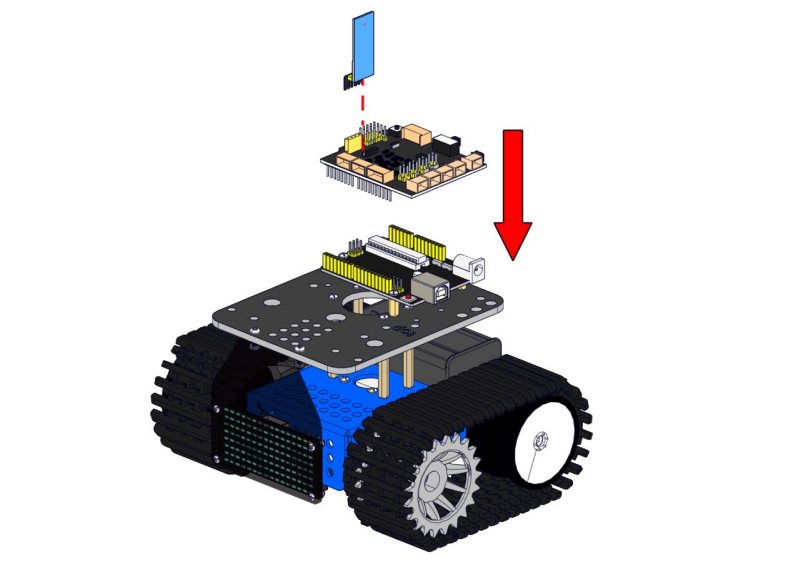
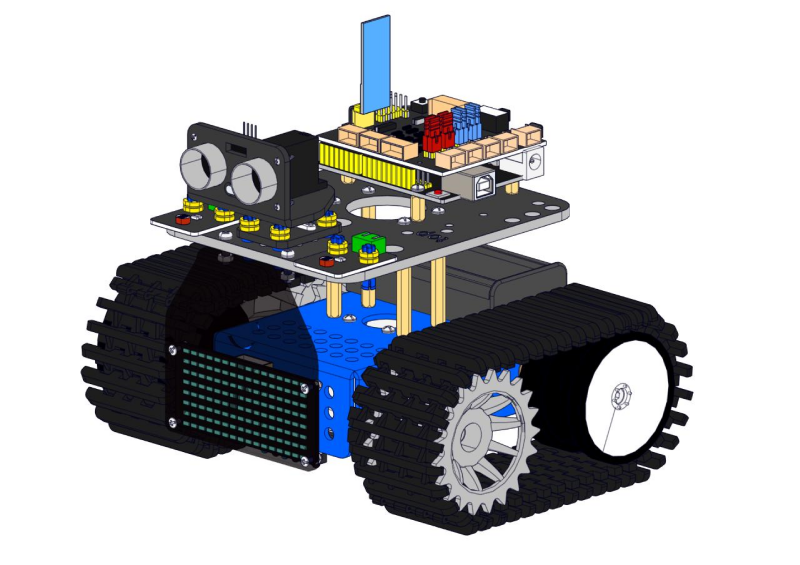
**Step2 **
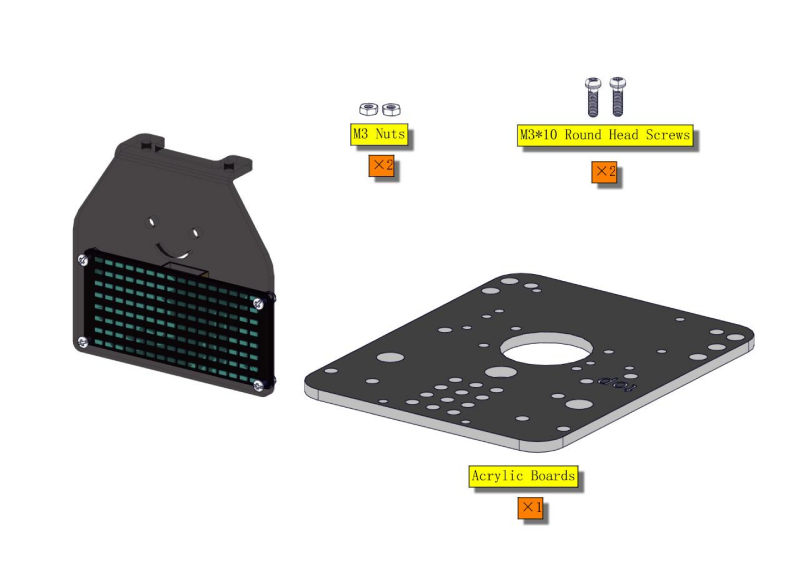
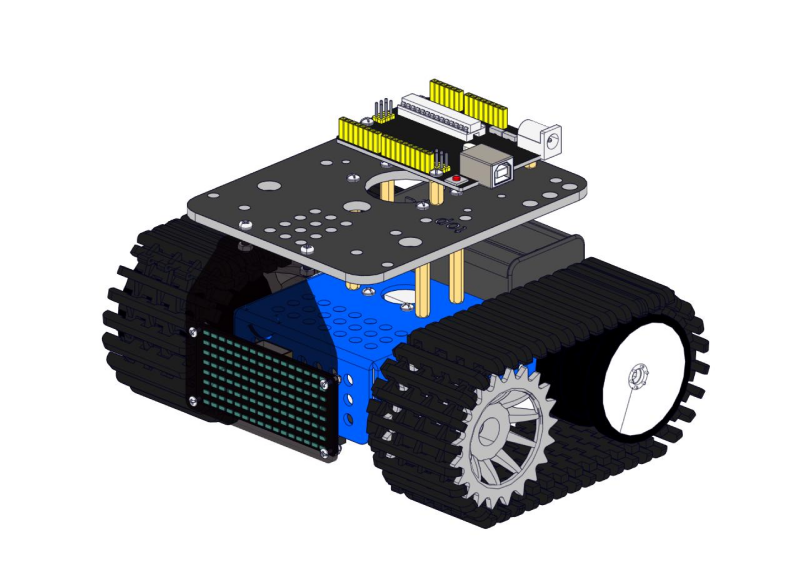
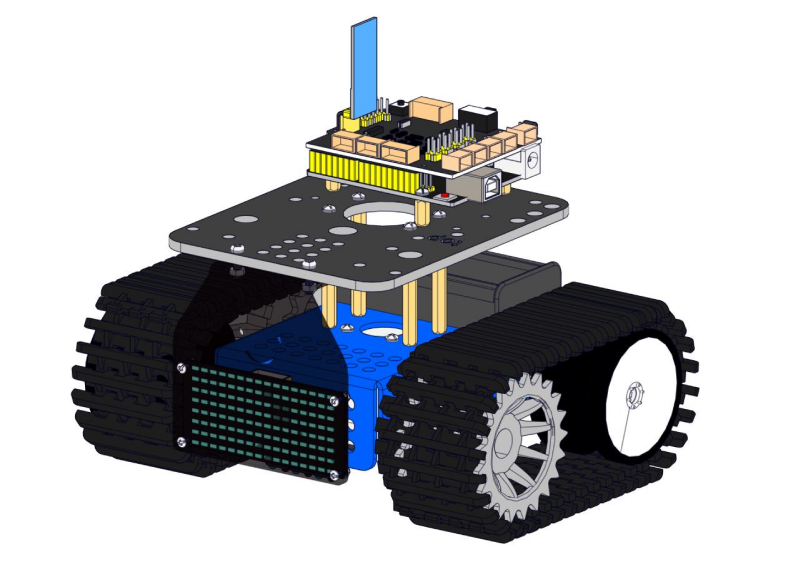
Step 3

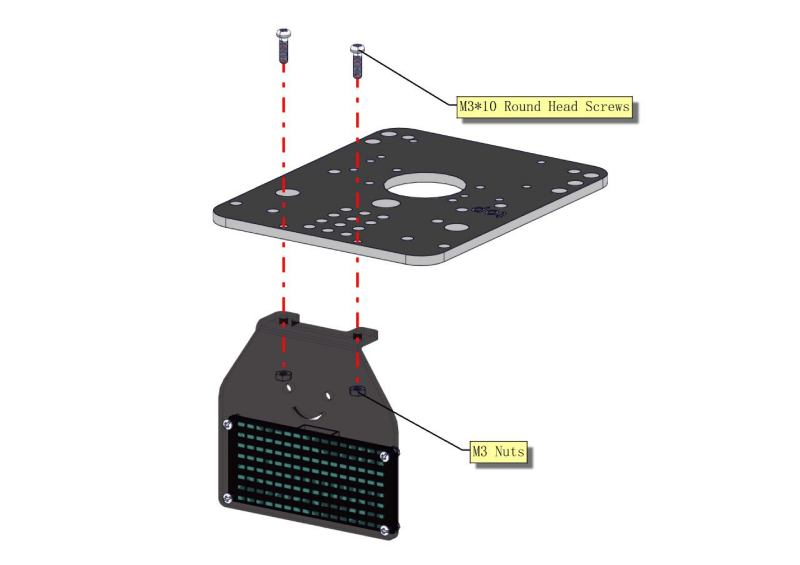
Step 4
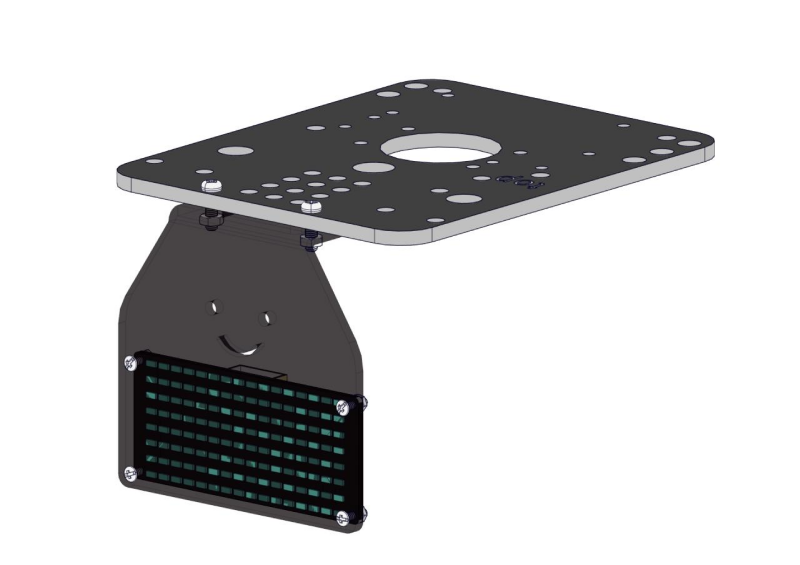
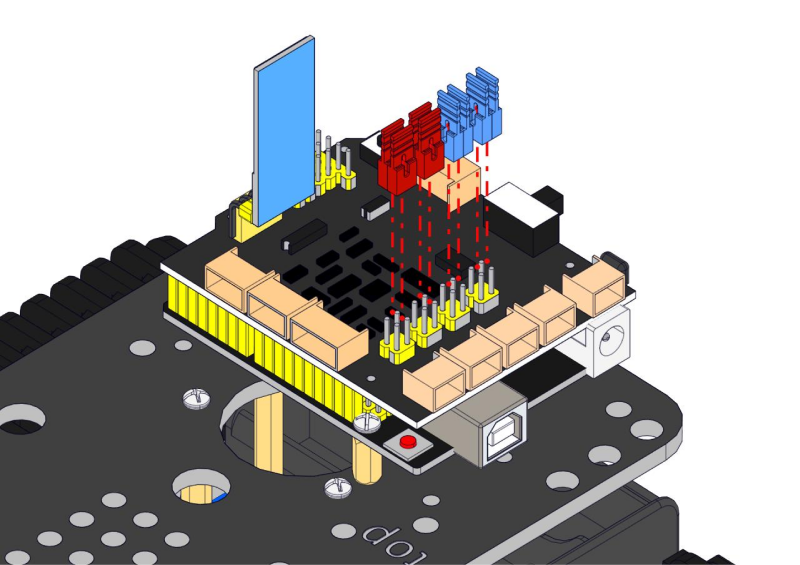
Step 5
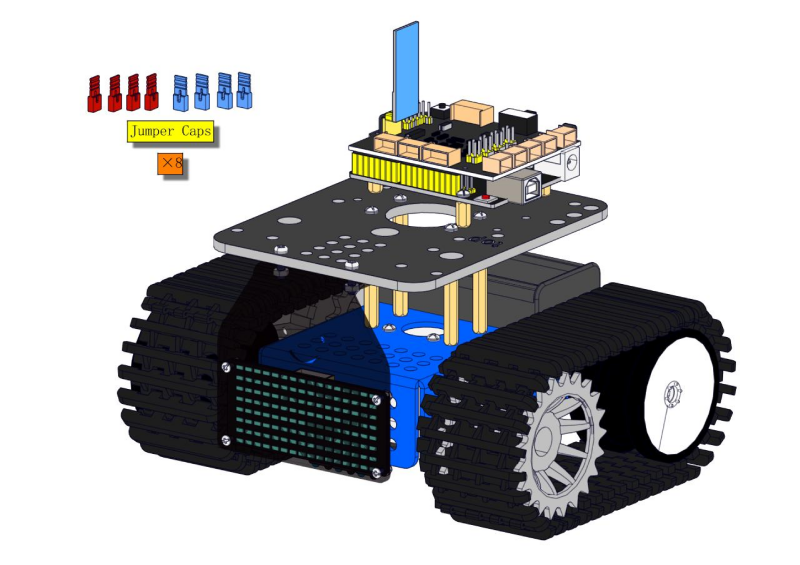
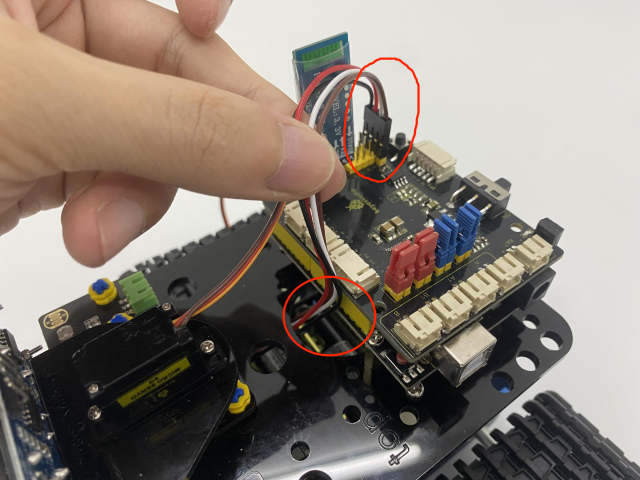
Note the direction of jumper caps.
Step 6
Step 7
Step 8
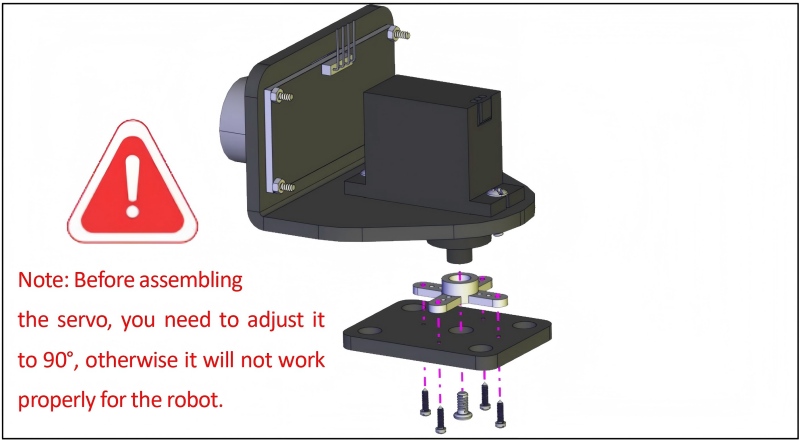
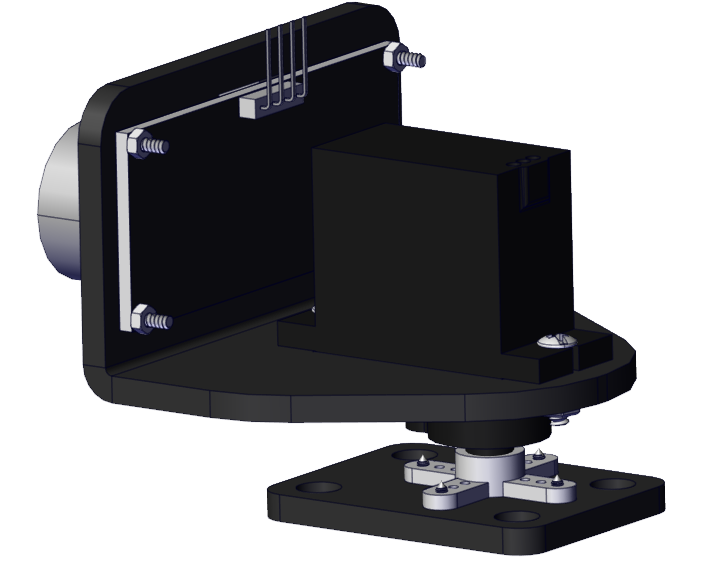
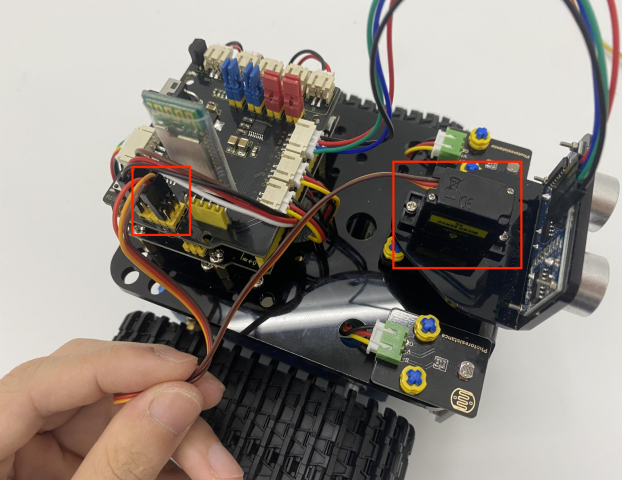
(Need to adjust the angle of the servo)
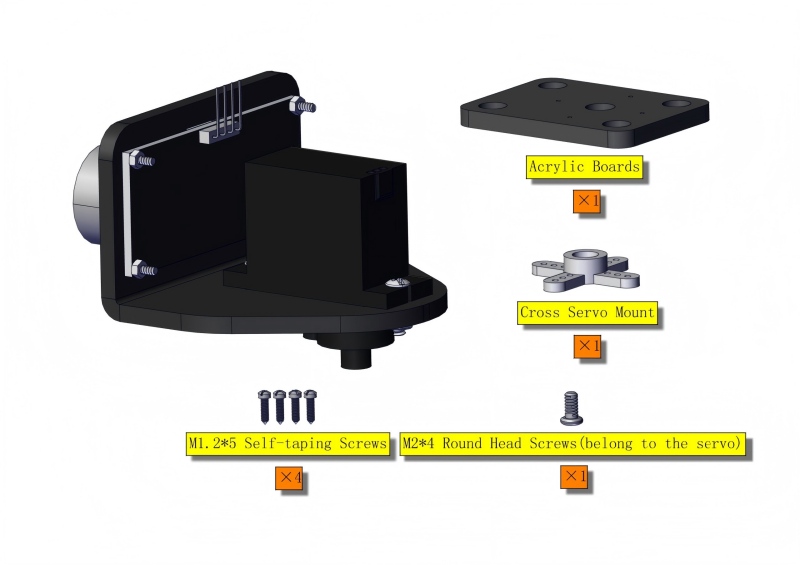
Set the angle of the servo to 90°
To adjust the code of the servo,please select it according to the course.
1.Arduino: Download the code file: Arduino
2.**Kidsblock: **Download the code file: Kidsblock
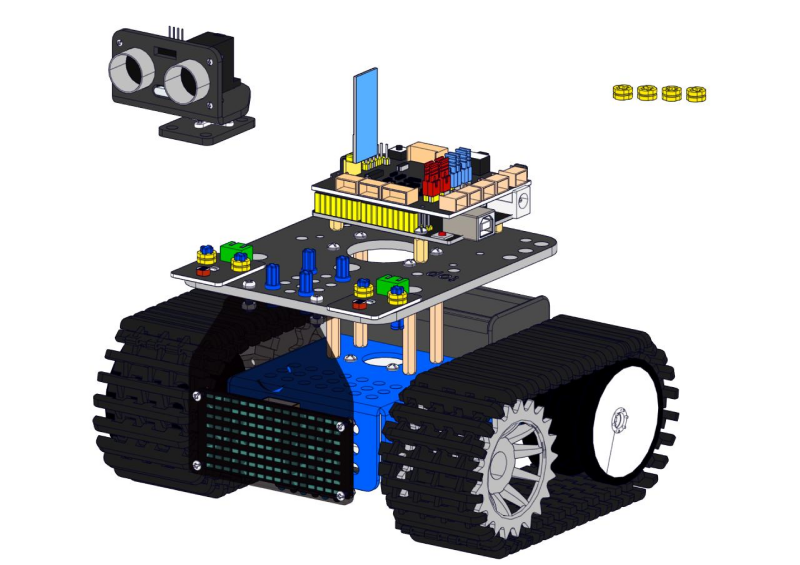
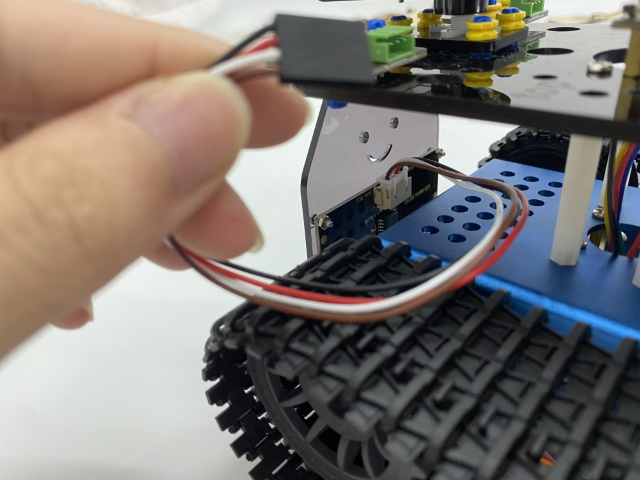
After initializing servo angle, install the Bluetooth module.
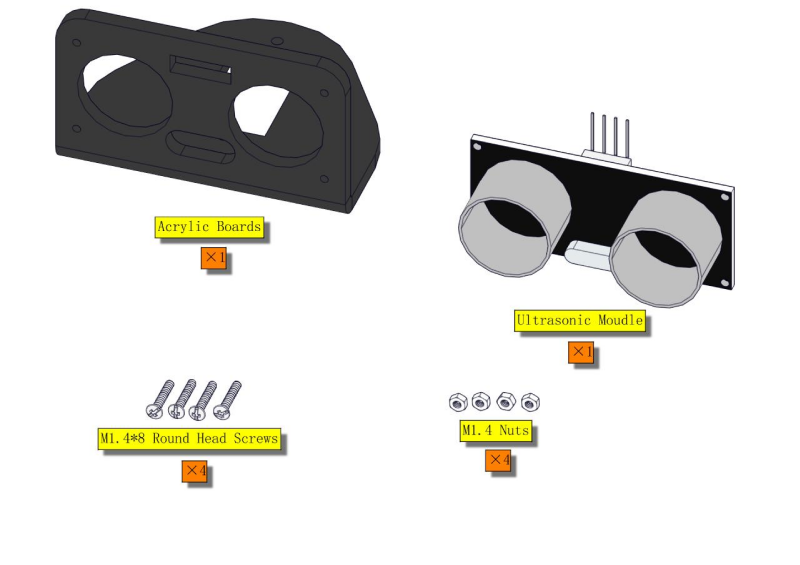
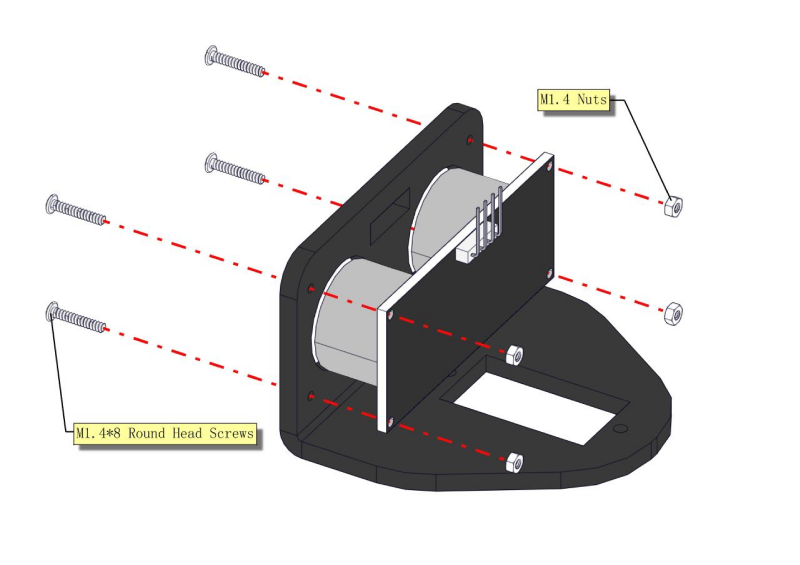
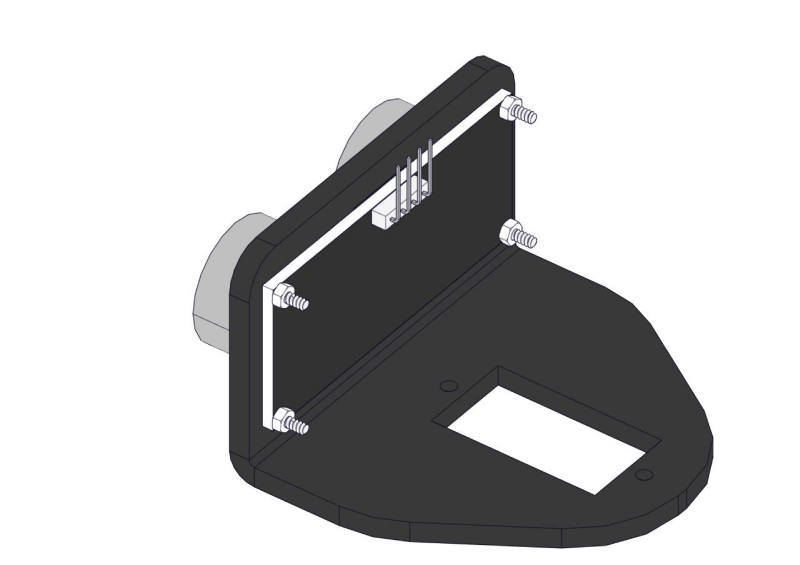
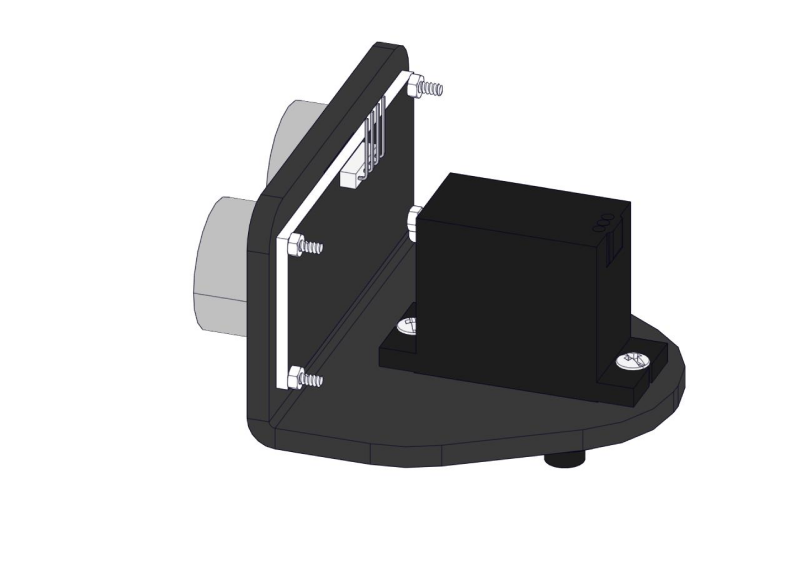
Keep the ultrasonic sensor parallel to the board.
Step 9

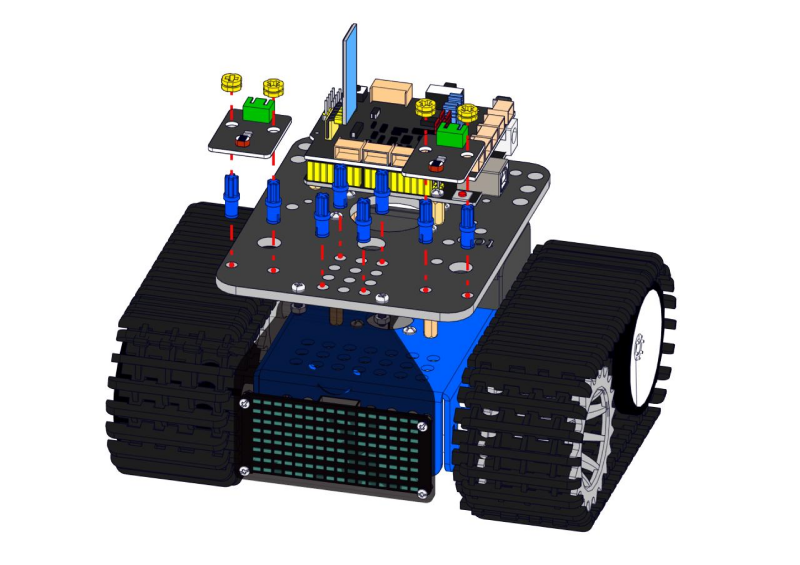
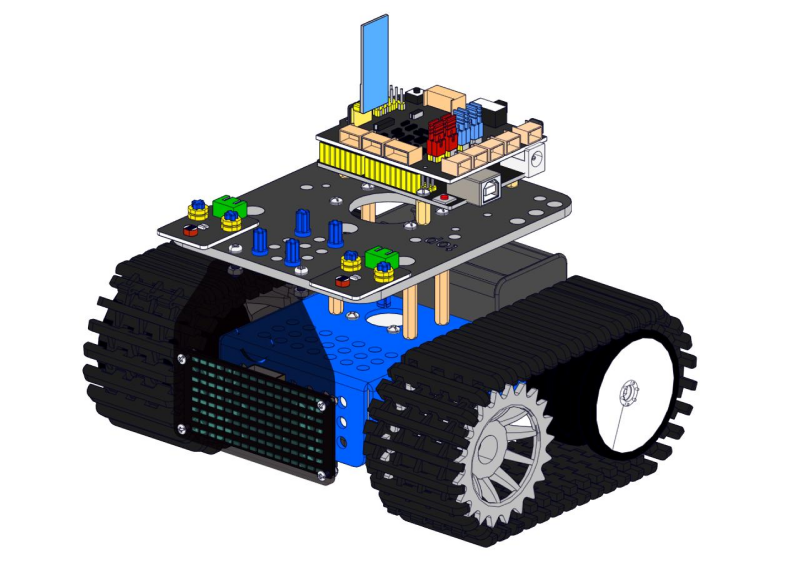
Step 10
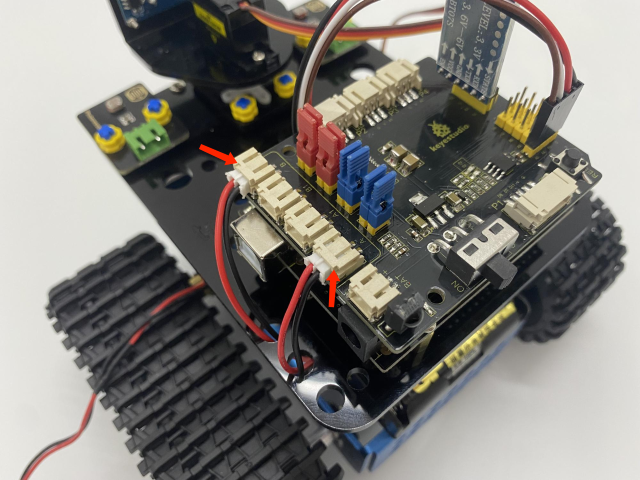
Wire up
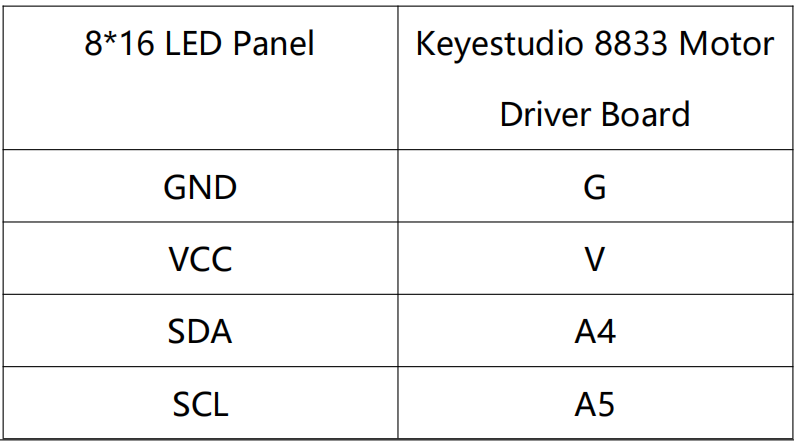
For 8*16 LED panel, Make wires connect to A4 and A5.
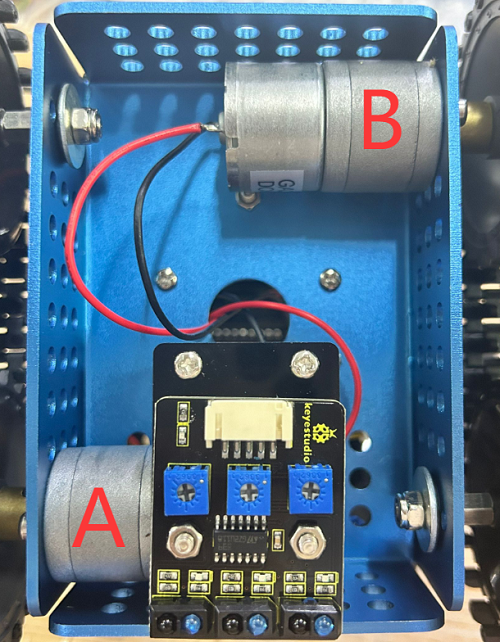
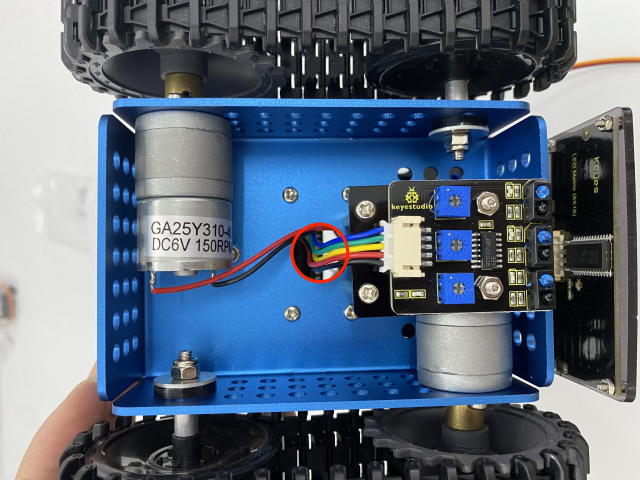
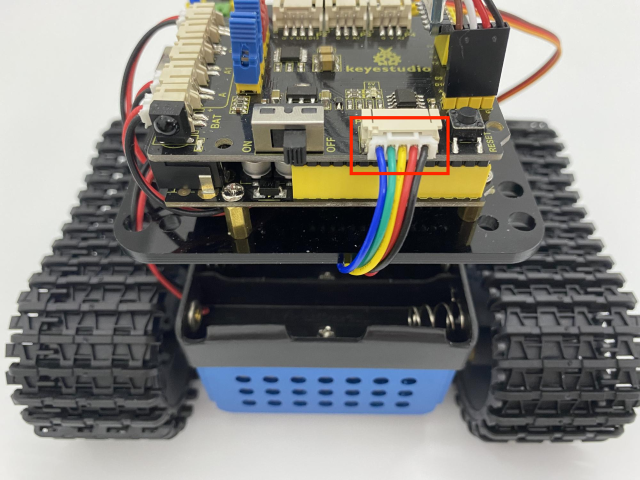
Connect the motor A to A port and make the motor B to B port.
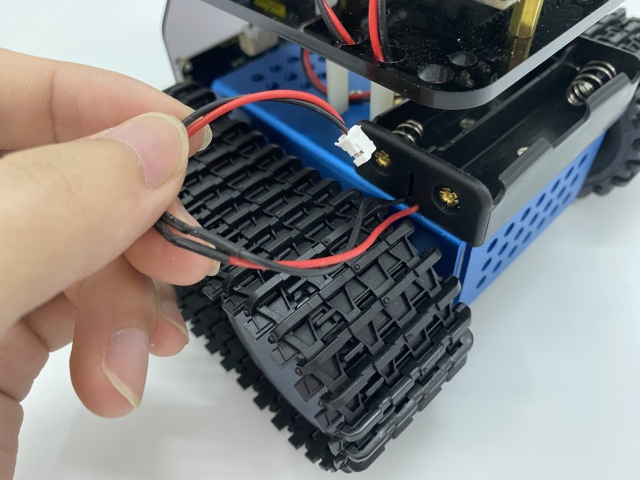
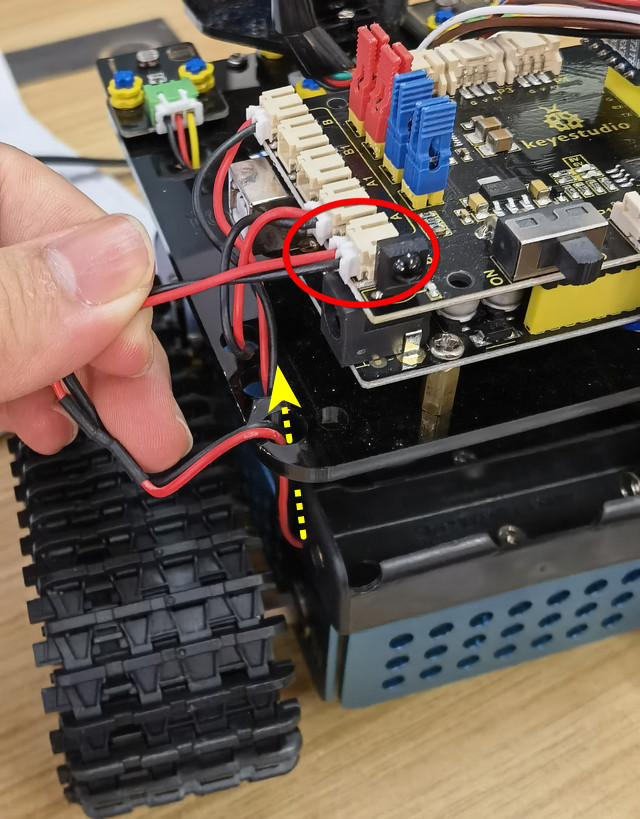
Connect the power wire.
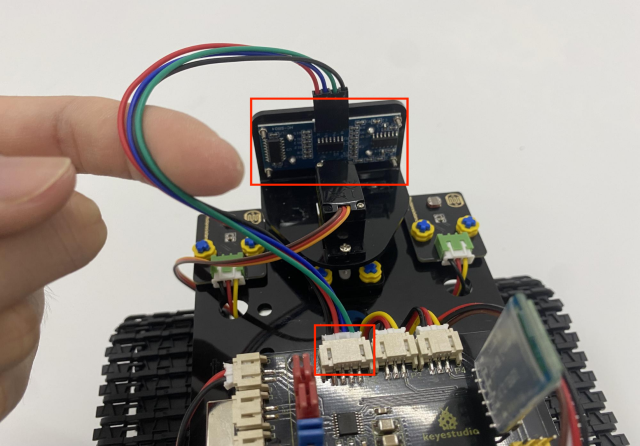
Line Tracking Sensor(see the picture)

Wire up the photoresistors
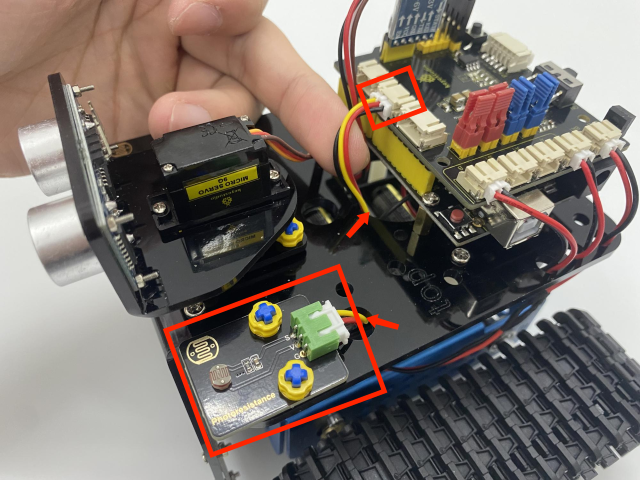
Photoresistor |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
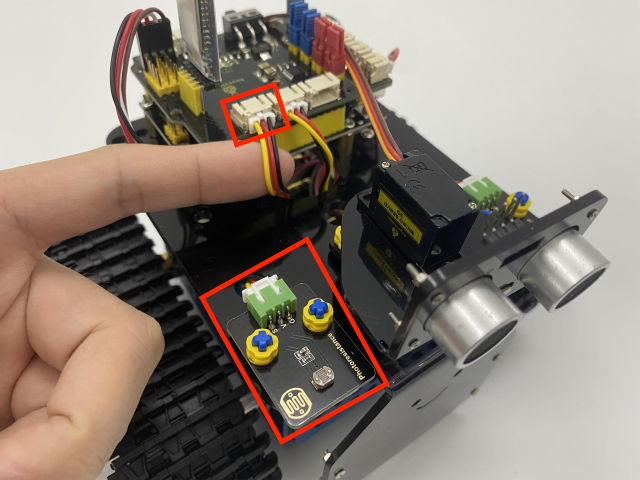
Photoresistor |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
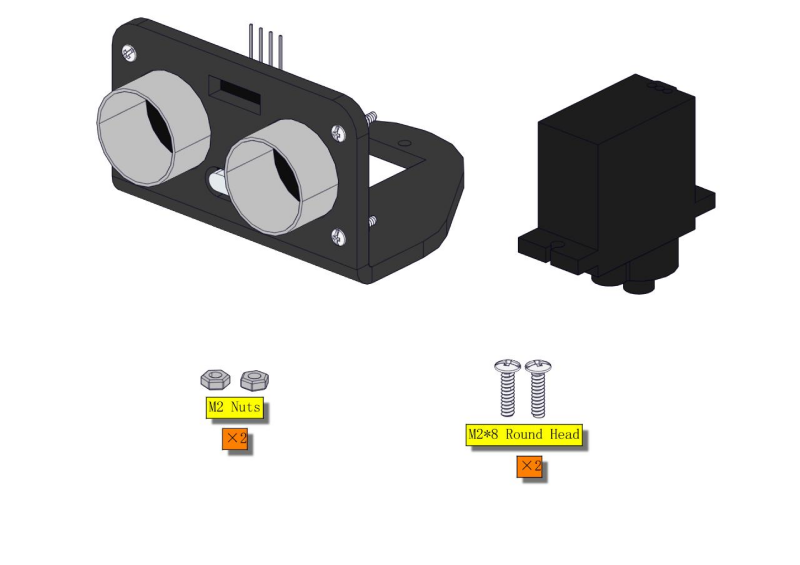
Wire up ultrasonic sensor.

Ultrasonic Sensor |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
Wire up the servo(D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Brown |
G |
Red |
V(5V) |
Orange |
D10 |
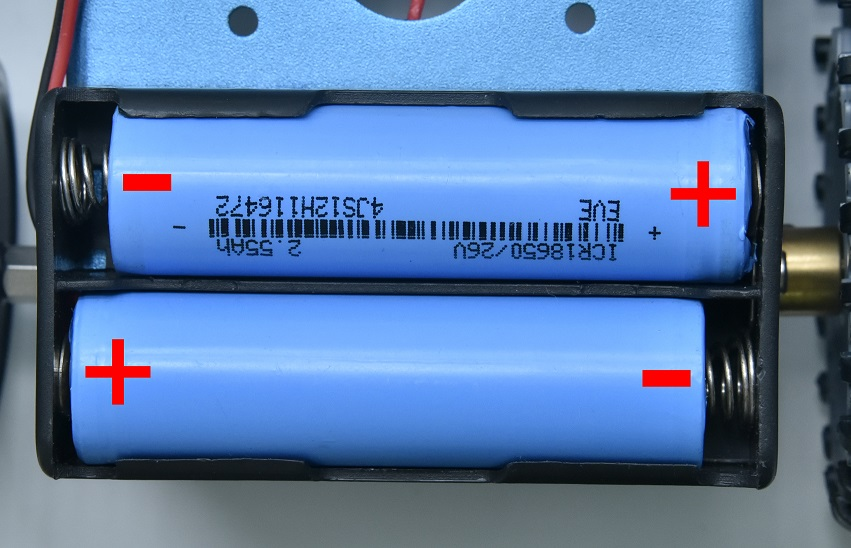
We adopt a model 18650 lithium battery with a pointed positive pole, whose power and capacity are not required.