Bezüglich des Sprachwechsels im Tutorial beachten Sie bitte das folgende animierte Bild. Concernant le changement de langue dans le tutoriel, veuillez vous référer à l’image animée suivante. En relación con el cambio de idioma en el tutorial, consulte la siguiente imagen animada. Per quanto riguarda il cambio di lingua nel tutorial, fare riferimento alla seguente immagine animata. Jeśli chodzi o przełączanie języka w samouczku, zapoznaj się z poniższym obrazkiem animowanym. Wat betreft het veranderen van de taal in de tutorial, zie de volgende geanimeerde afbeelding. Angående språkbytet i handledningen, vänligen se följande animerade bild.
1. Introducción del producto
1.1 Introducción
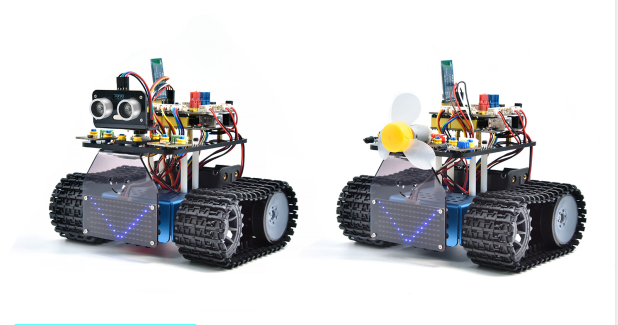
Este robot tanque educativo STEM V3.1 ha sido actualizado recientemente, añadiendo funciones de seguimiento de línea y extinción de incendios. Fortalece vigorosamente la relación entre padres e hijos, y estimula la imaginación de los niños a través de la programación y la codificación.
Durante el proceso de montaje, podrá observar sus múltiples funciones, como seguimiento de luz, seguimiento de línea, control remoto por IR y BT, ajuste de velocidad, entre otras. Además, hay algunas piezas pequeñas que le ayudarán a ensamblar el coche robot.
Se incluyen sensores y módulos básicos, como un sensor de llama, un sensor BT, un sensor de evasión de obstáculos, un sensor de seguimiento de línea y un sensor ultrasónico.
Los dos tutoriales para código en lenguaje C de Arduino IDE y programación gráfica KidsBlock también son adecuados para entusiastas de diferentes edades.
Es realmente la mejor opción para usted.
1.2 Características
Múltiples funciones: Confinamiento, seguimiento de línea, extinción de incendios, seguimiento de luz, control remoto por IR y BT, control de velocidad, entre otras.
Fácil de construir: ensamble el robot con algunas piezas.
Alta resistencia: soportes de aleación de aluminio, motores metálicos, ruedas de alta calidad.
Alta extensión: conecte muchos sensores y módulos a través del escudo de control de motores y piezas LEGO.
Múltiples controles: control remoto por IR, control por App (sistema iOS y Android).
Programación básica: código en lenguaje C de Arduino IDE y programación gráfica KidsBlock.
1.3 Parámetros
Voltaje de trabajo: 5V
Voltaje de entrada: 6-9V
Corriente de salida máxima: 1.5A
Disipación máxima de potencia: 32W
Velocidad del motor: 5V 200 rpm / min
Modo de conducción del motor: doble puente H (HR8833)
Ángulo de detección ultrasónica: <15°
Distancia de detección ultrasónica: 2cm-300cm
Distancia de control remoto por infrarrojos: 10 metros (medido)
Distancia de control remoto BT: 30 metros (medido)
1.4 Lista de componentes
No. |
Nombre |
Cant. |
Imagen |
|---|---|---|---|
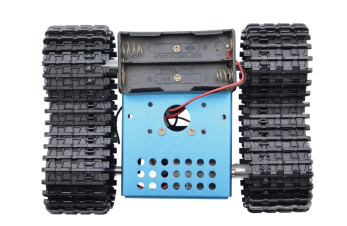
1 |
Ensamblaje inferior |
1 |
|
2 |
Placa de desarrollo |
1 |
|
3 |
Placa de expansión del controlador de motor |
1 |
|
4 |
Módulo BLE BT |
1 |
|
5 |
Sensor ultrasónico HC-SR04 |
1 |
|
6 |
Panel LED Keyestudio 8*16 |
1 |
|
7 |
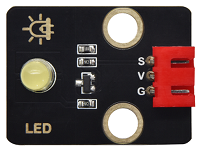
Módulo LED amarillo |
1 |
|
8 |
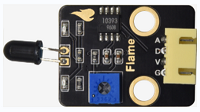
Sensor de llama |
2 |
|
9 |
Módulo motor 130 |
1 |
|
10 |
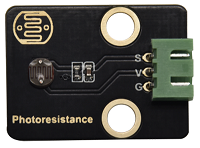
Fotorresistencia |
2 |
|
11 |
Placa acrílica para panel LED 8*16 |
1 |
|
12 |
Placa acrílica superior |
1 |
|
13 |
Placa acrílica |
1 |
|
14 |
Control remoto |
1 |
|
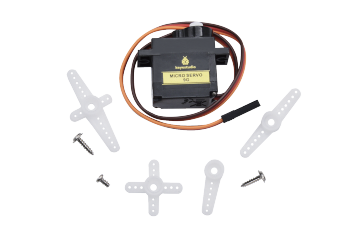
15 |
Servo |
1 |
|
16 |
Cable USB |
1 |
|
17 |
Tubo de enrollado |
1 |
|
18 |
Destornillador 3.0*40MM |
1 |
|
19 |
Bridas 3*100MM |
5 |
|
20 |
Llave tipo L M2.5 |
1 |
|
21 |
Llave tipo L M3 |
1 |
|
22 |
Llave tipo L M1.5 |
1 |
|
23 |
Cartón |
1 |
|
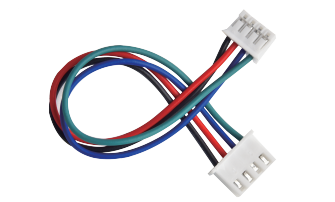
24 |
Cable Dupont 4P M-F PH2.0mm a 2.54 |
1 |
|
25 |
Cable Dupont 4P HX-2.54 |
1 |
|
26 |
Cable Dupont 5P JST-PH2.0MM |
1 |
|
27 |
Cable Dupont 3P-3P XH2.54 a 2.54 |
1 |
|
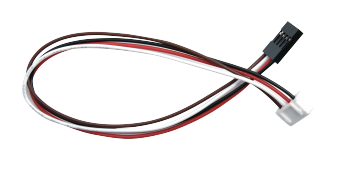
28 |
Cable Dupont 3P-3P XH2.54 a PH2.0 |
2 |
|
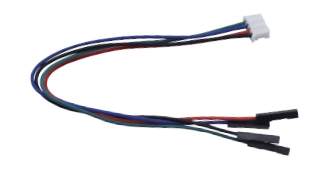
29 |
Cable Dupont 4P-3P XH2.54 a PH2.0 |
2 |
|
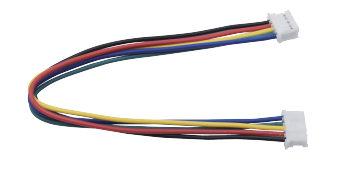
30 |
Cable Dupont 4P XH2.54 a PH2.0 |
1 |
|
31 |
Tornillos de cabeza redonda M1.4*8MM |
6 |
|
32 |
Tuercas M1.4 |
6 |
|
33 |
Tuercas M2 |
8 |
|
34 |
Tornillos de cabeza redonda M2*8MM |
8 |
|
35 |
Tornillos de cabeza redonda M1.2*5MM |
6 |
|
36 |
Tornillos de cabeza redonda M3*6MM |
18 |
|
37 |
Tornillos de cabeza plana M3*10MM |
3 |
|
38 |
Tuercas M3 |
3 |
|
39 |
Pilar de cobre de doble paso M3*10MM |
4 |
|
40 |
Pilar de cobre de doble paso M3*45MM |
4 |
|
41 |
Pasador de eje técnico con estrías de fricción |
11 |
|
42 |
Buje técnico 4265c |
11 |
|
43 |
Puente jumper azul |
4 |
|
44 |
Puente jumper rojo |
4 |
|
45 |
Llave de extremo abierto simple |
1 |
|
46 |
Llave de extremo abierto doble |
1 |
|
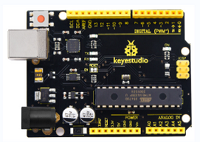
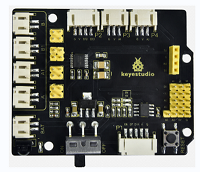




























1.5 Placa de desarrollo Keyestudio V4.0
Debe saber que la placa de desarrollo Keyestudio V4.0 es el núcleo de este coche inteligente.
La placa de desarrollo Keyestudio V4.0 está basada en el microcontrolador ATmega328P, y utiliza un chip CP2102 como convertidor UART a USB.
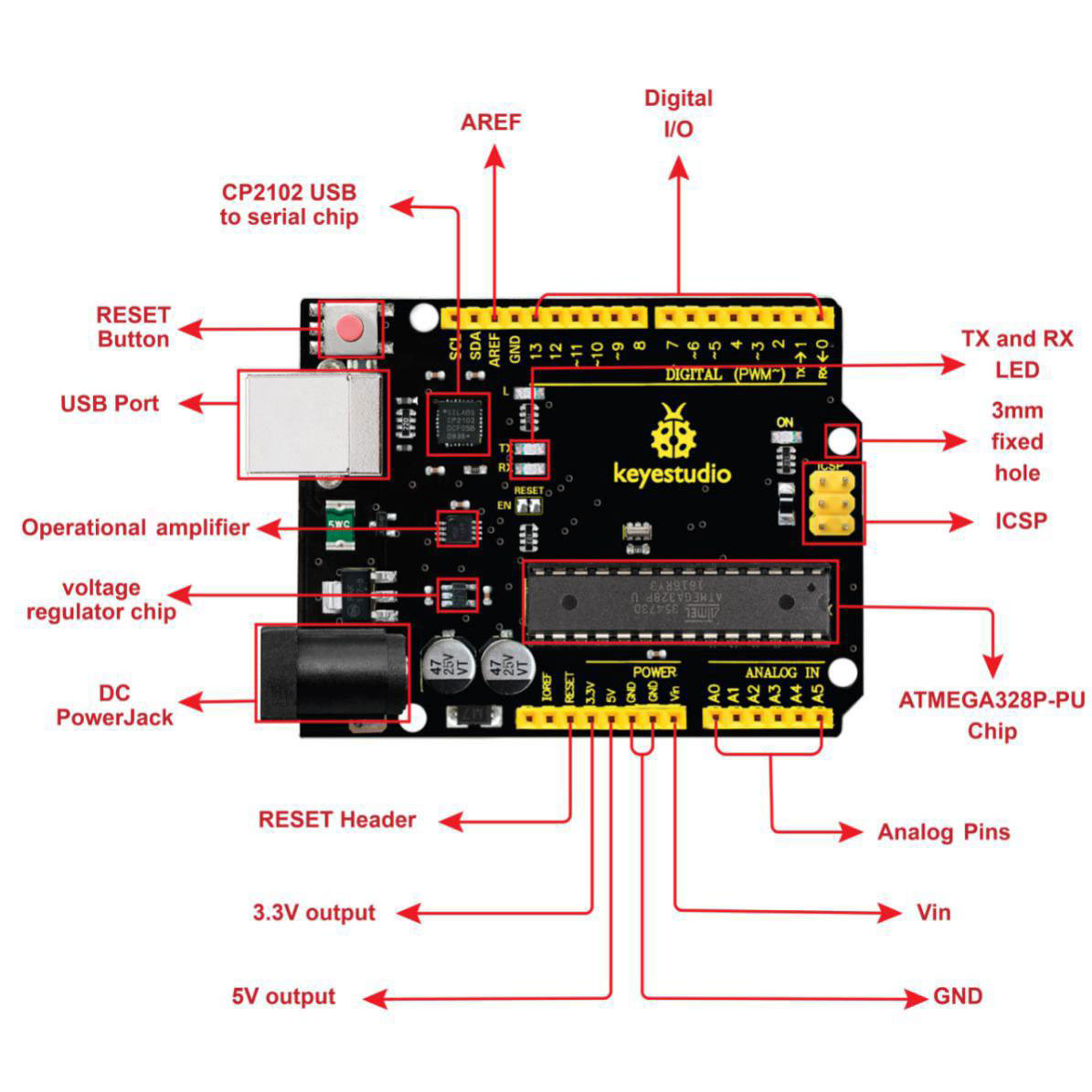
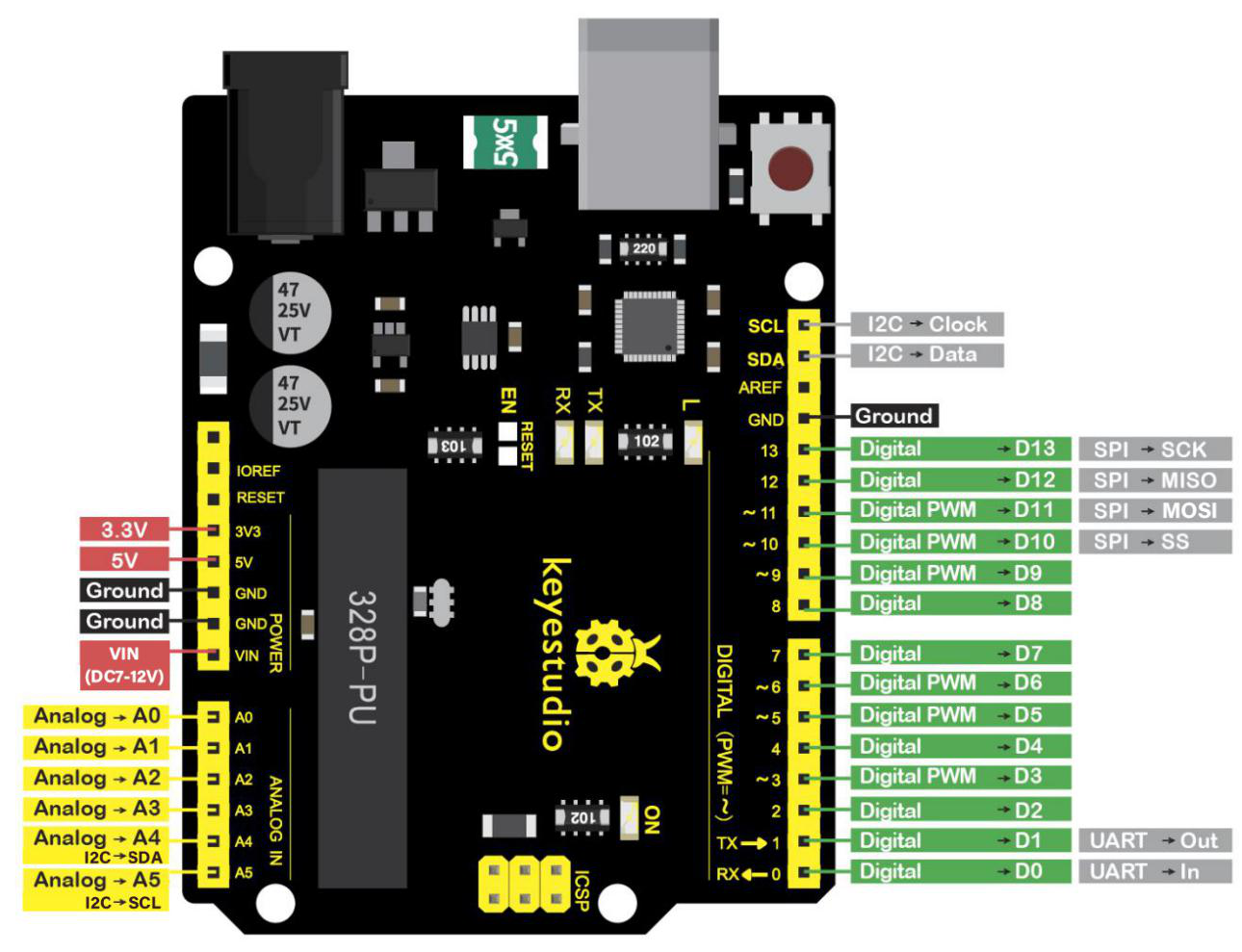
Tiene 14 pines de entrada/salida digital (de los cuales 6 pueden usarse como salidas PWM), 6 entradas analógicas, un cristal de cuarzo de 16 MHz, una conexión USB, un conector de alimentación, 2 cabezales ICSP y un botón de reinicio.
Podemos alimentarla con un cable USB, el conector de alimentación DC externo (DC 7-12V) o los conectores hembra Vin/ GND (DC 7-12V).
Microcontrolador |
ATmega328P-PU |
|---|---|
Voltaje de operación |
5V |
Voltaje de entrada (recomendado) |
DC7-12V |
Pines de E/S digital |
14 (D0-D13) (de los cuales 6 proporcionan salida PWM) |
Pines de E/S digital PWM |
6 (D3, D5, D6, D9, D10, D11) |
Pines de entrada analógica |
6 (A0-A5) |
Corriente DC por pin de E/S |
20 mA |
Corriente DC para pin 3.3V |
50 mA |
Memoria Flash |
32 KB (ATmega328P-PU) de los cuales 0.5 KB son usados por el bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Velocidad de reloj |
16 MHz |
LED_BUILTIN |
D13 |