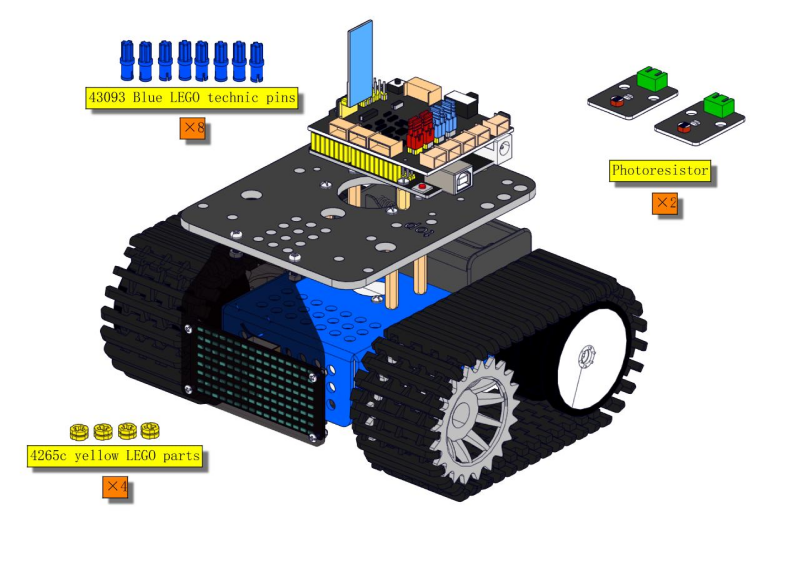
2. Instalación del Producto
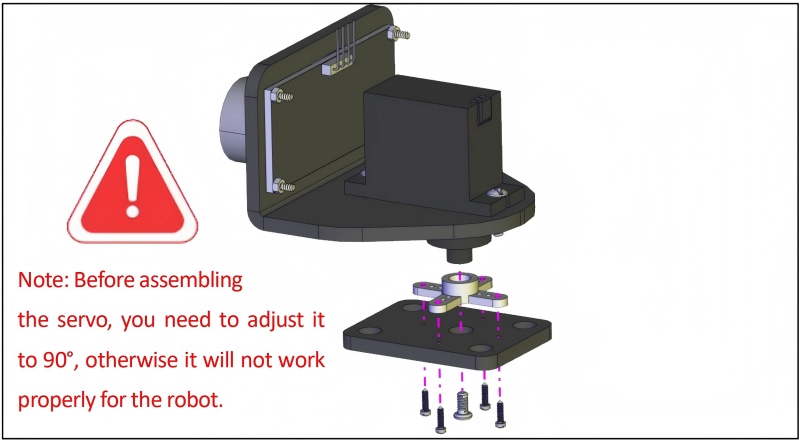
Precaución: Establezca el ángulo inicial del servo y retire las películas delgadas de las placas antes de instalar este robot.

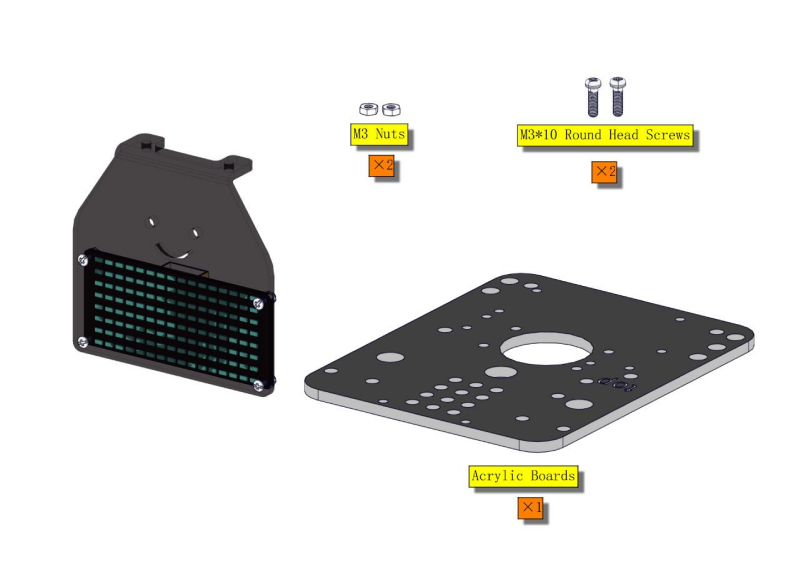
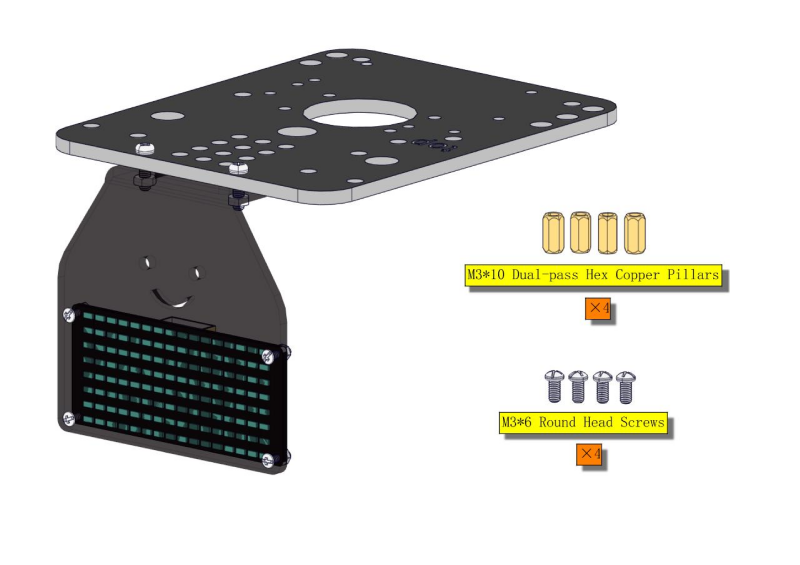
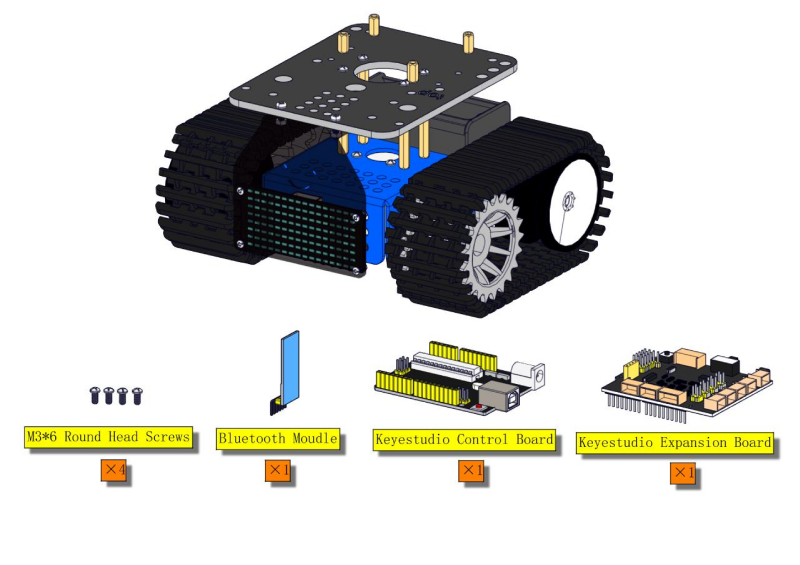
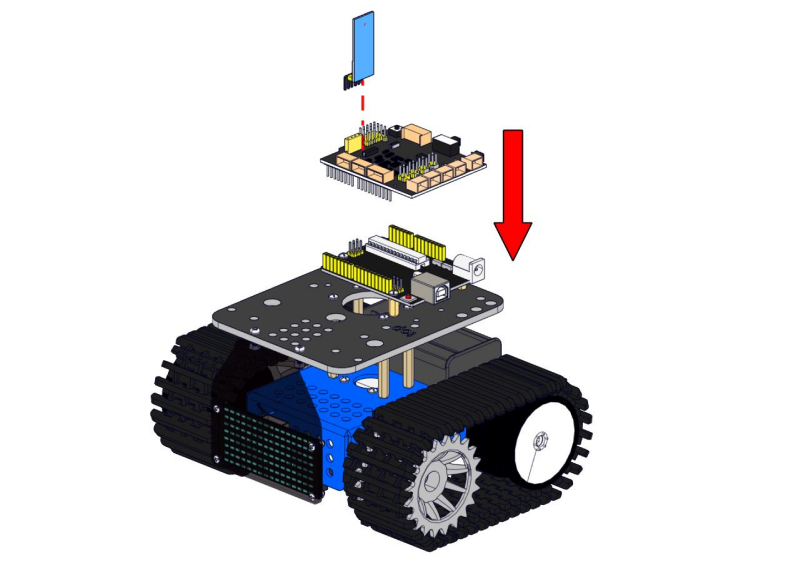
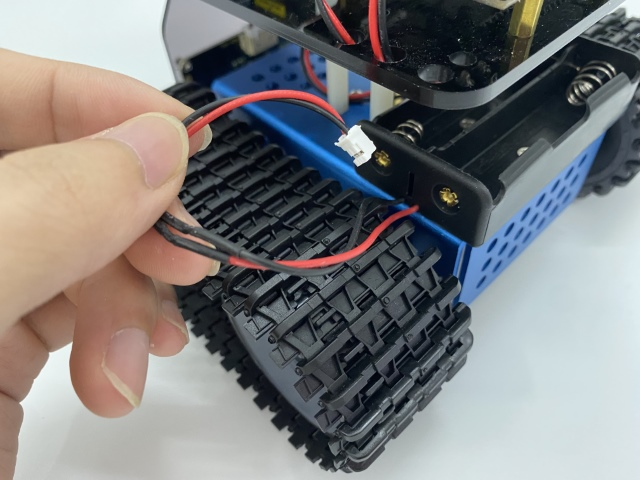
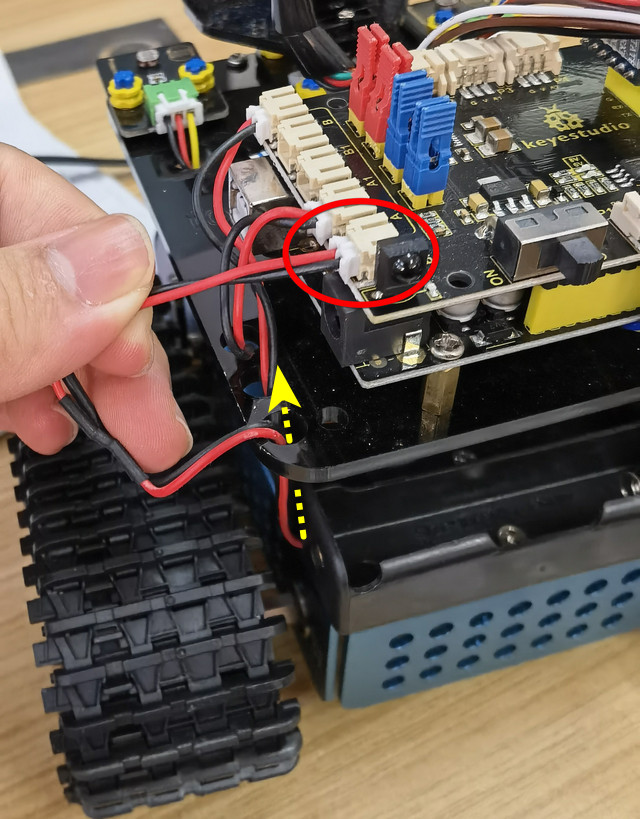
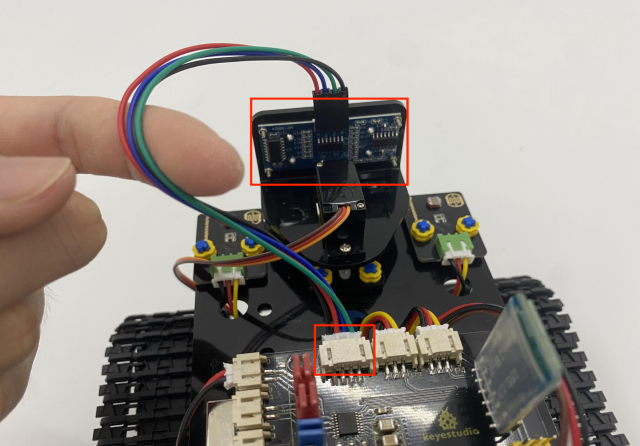
Paso 1

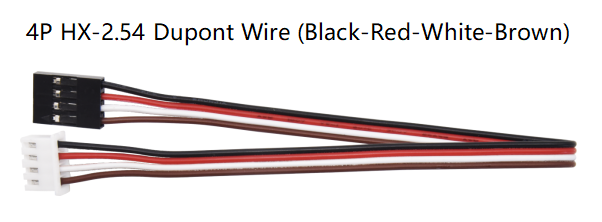
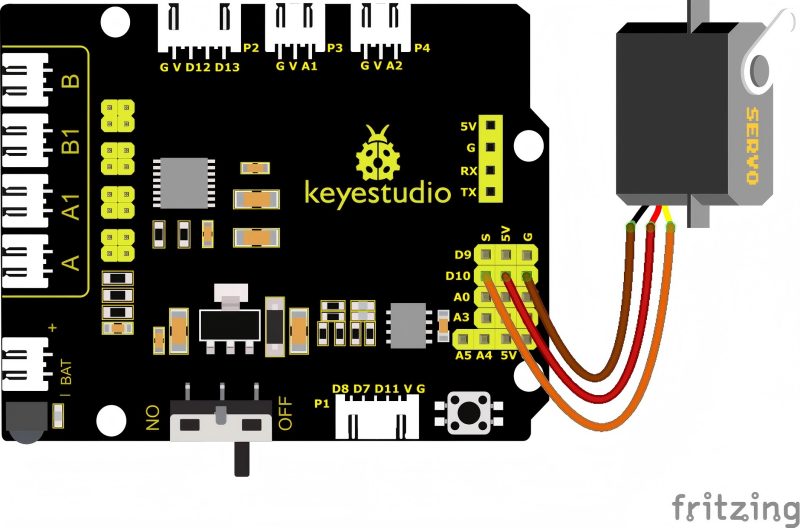
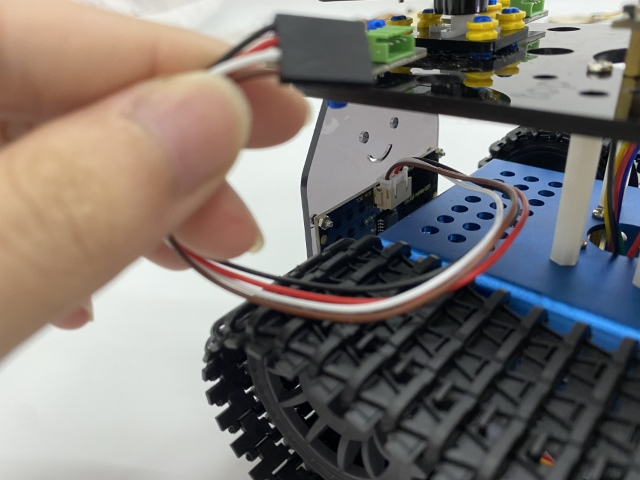
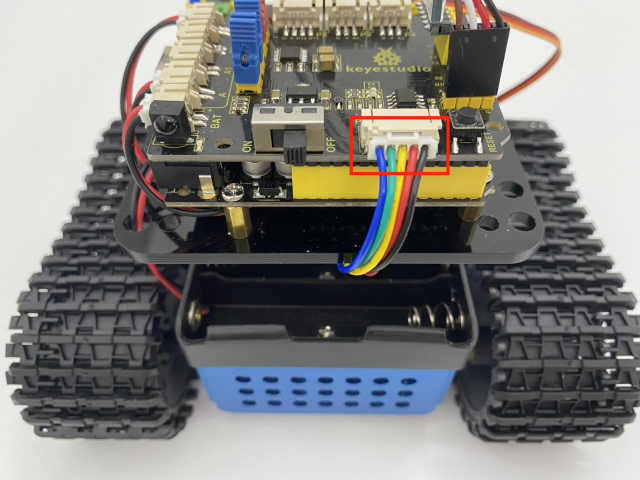
Por favor, realice el cableado primero.
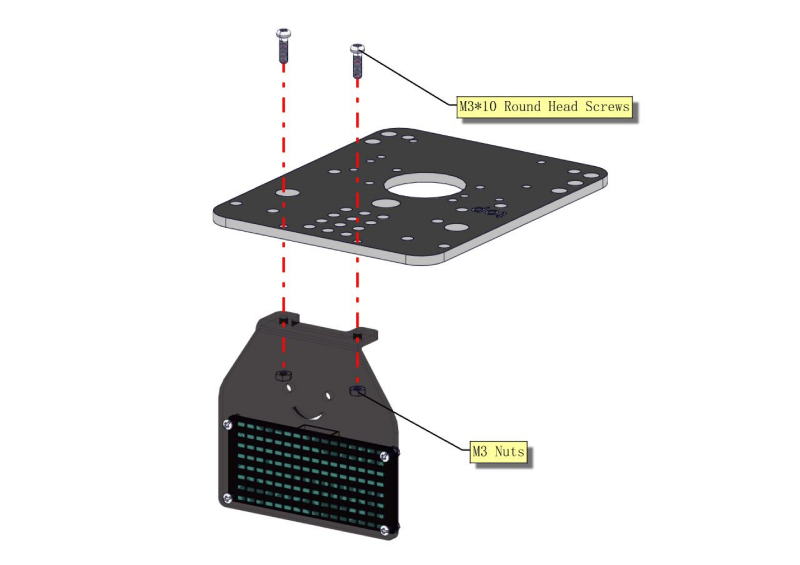
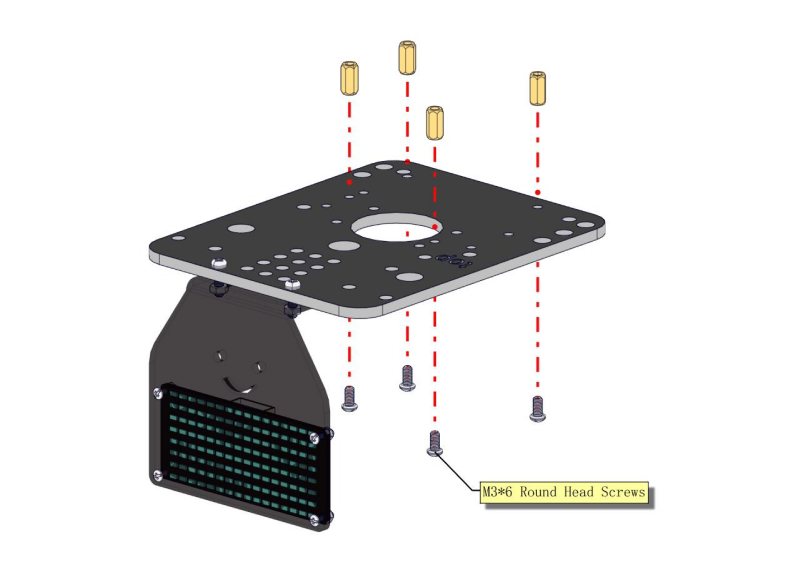
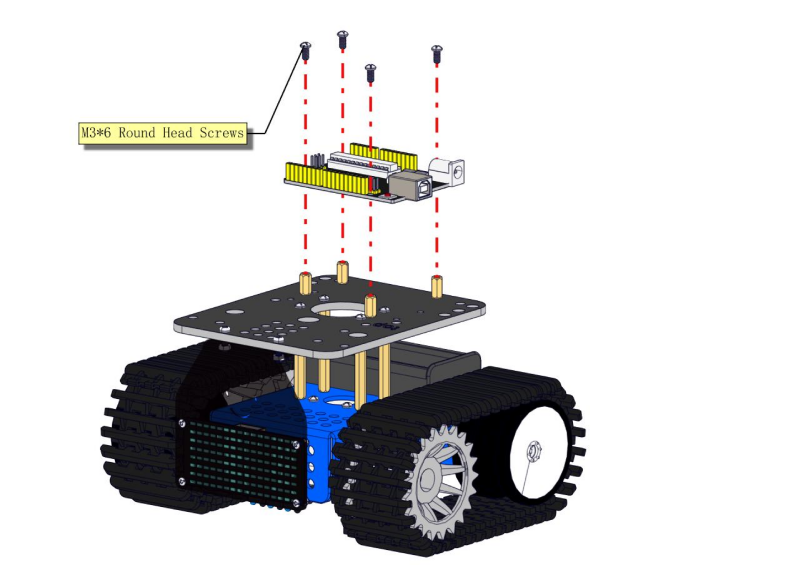
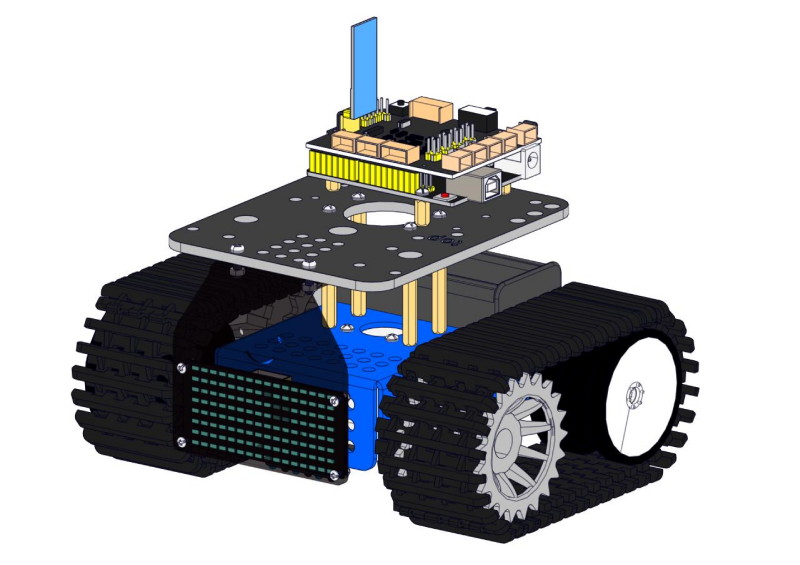
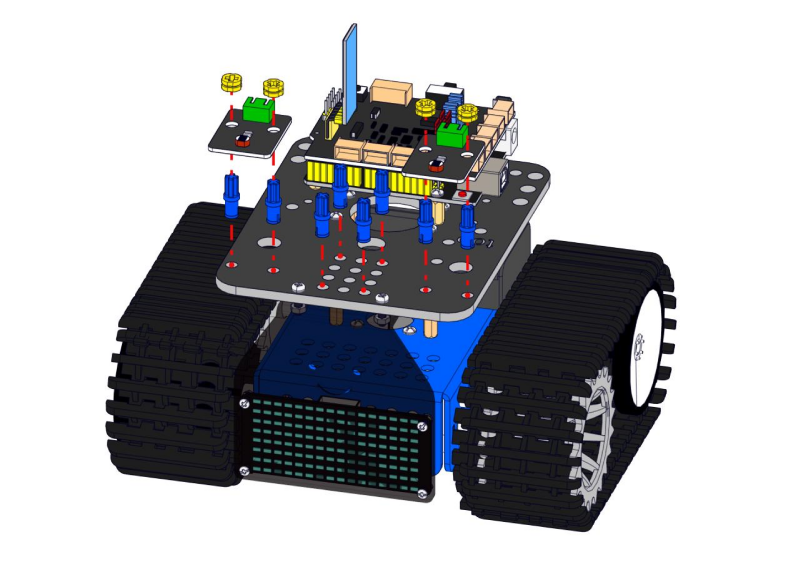
Paso 2
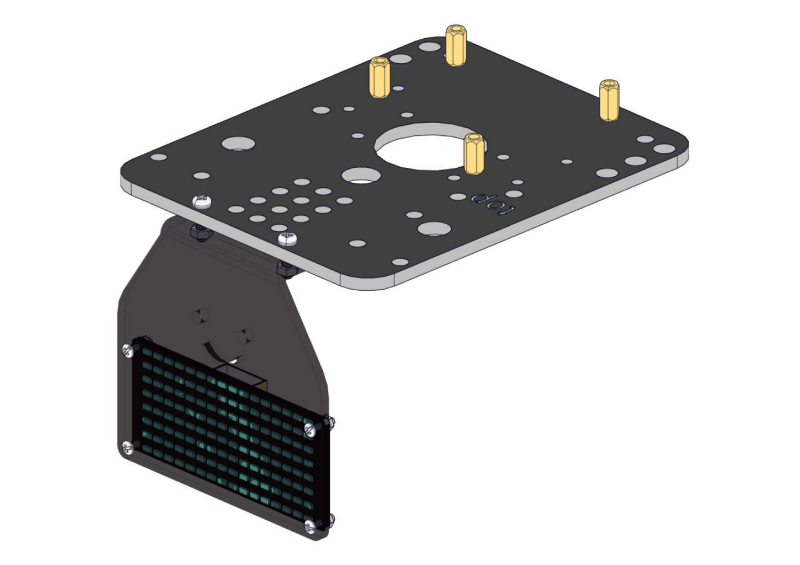
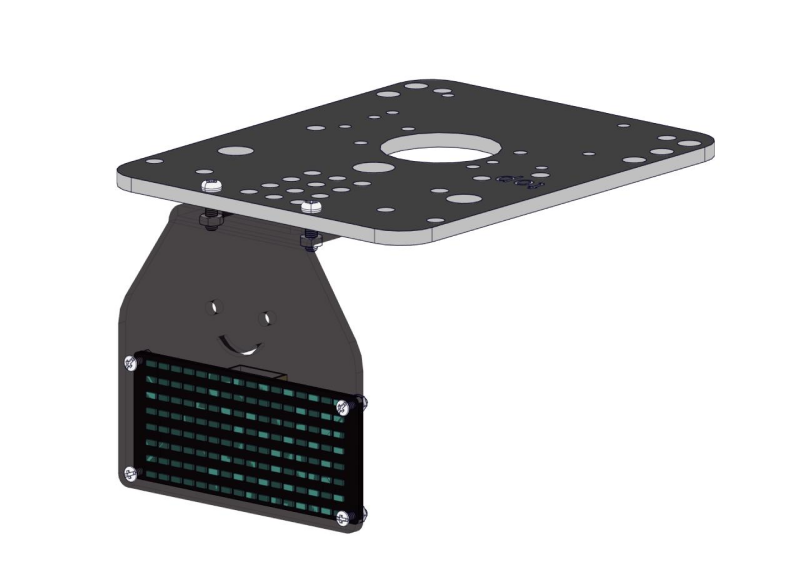
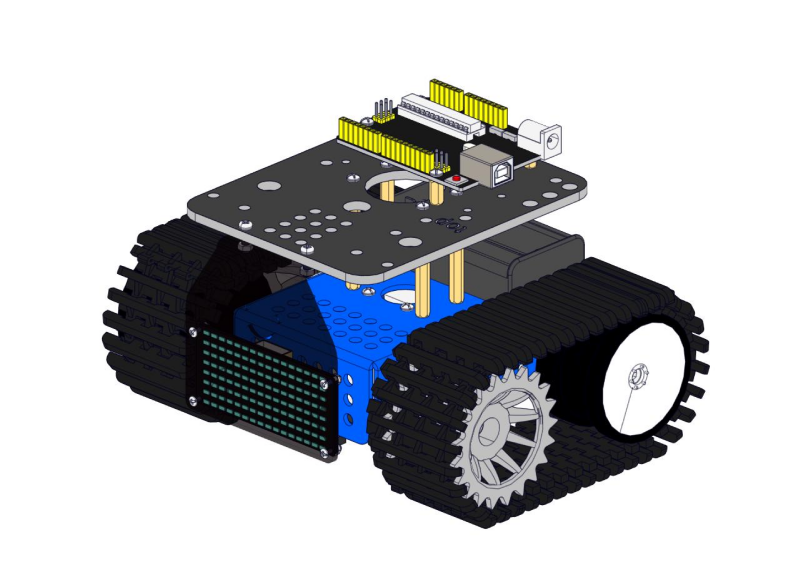
Paso 3

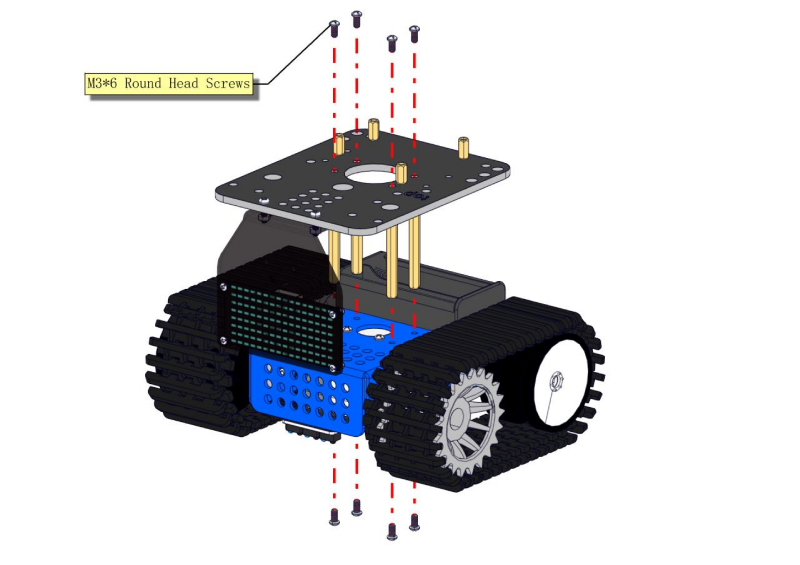
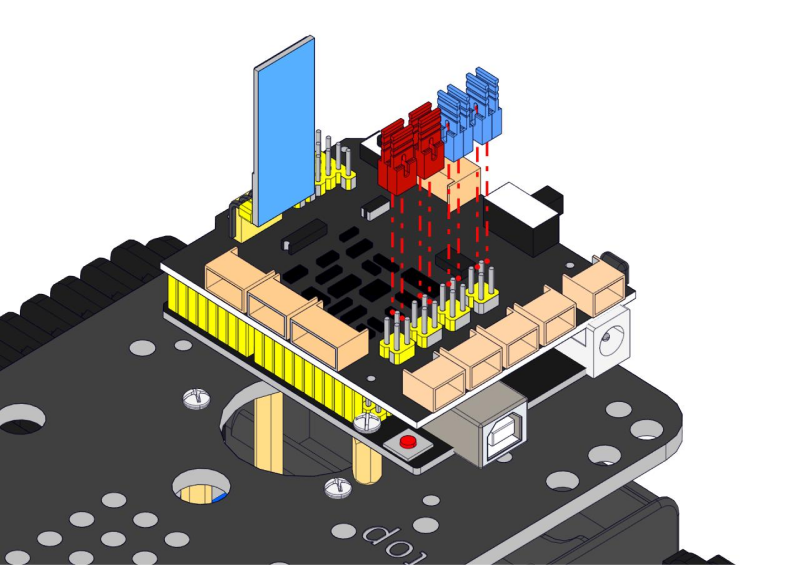
Paso 4
Paso 5
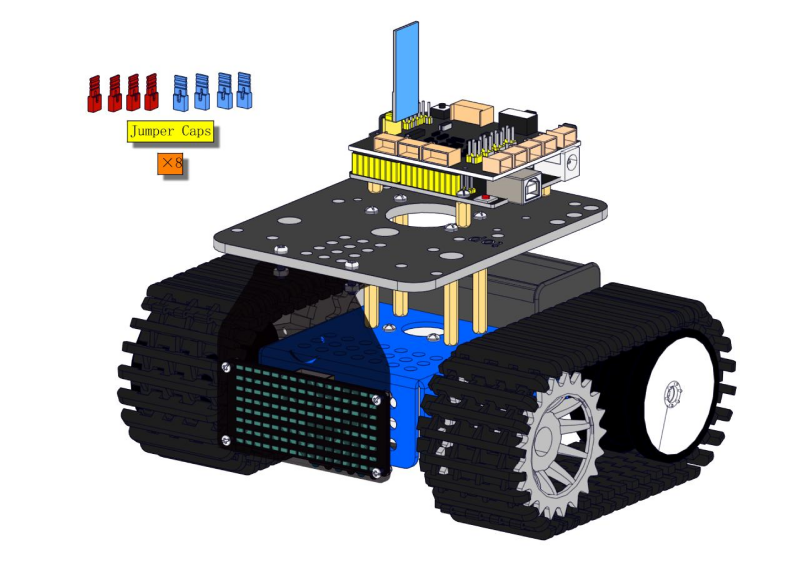
Observe la dirección de los puentes (jumper caps).
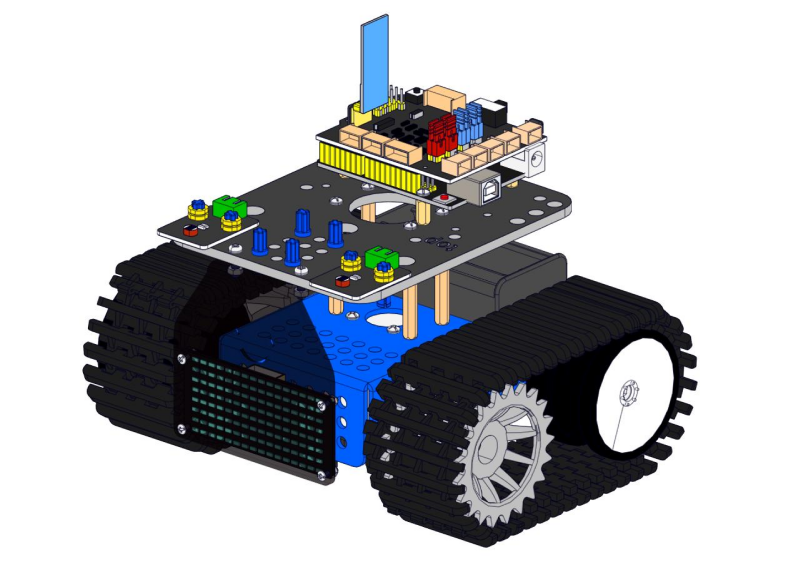
Paso 6
Paso 7
Paso 8
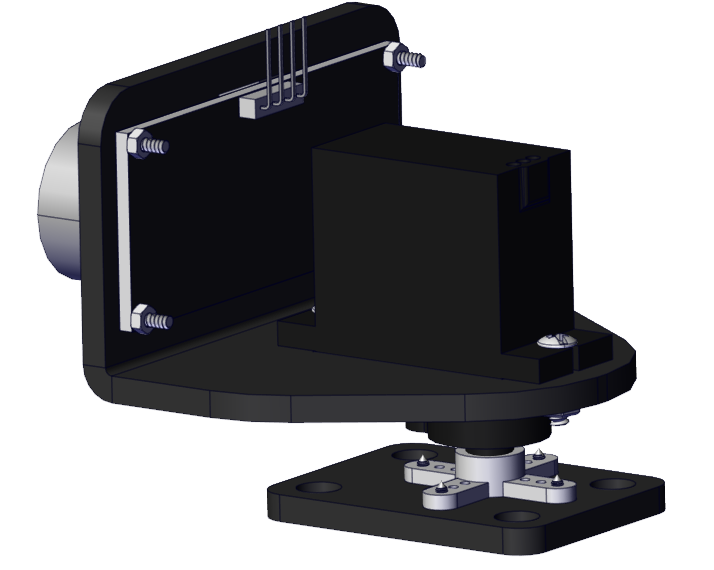
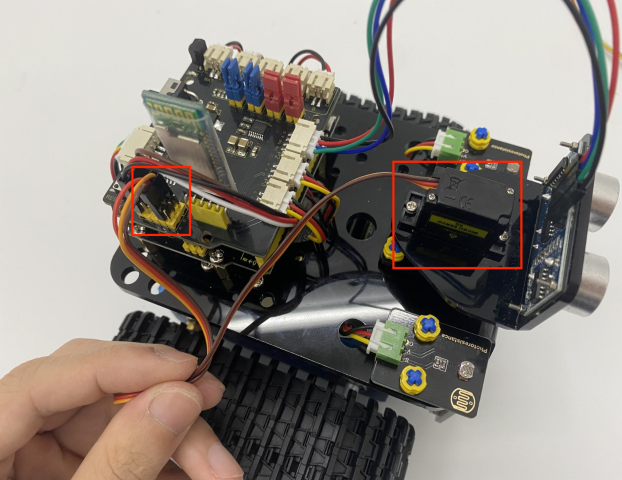
(Es necesario ajustar el ángulo del servo)
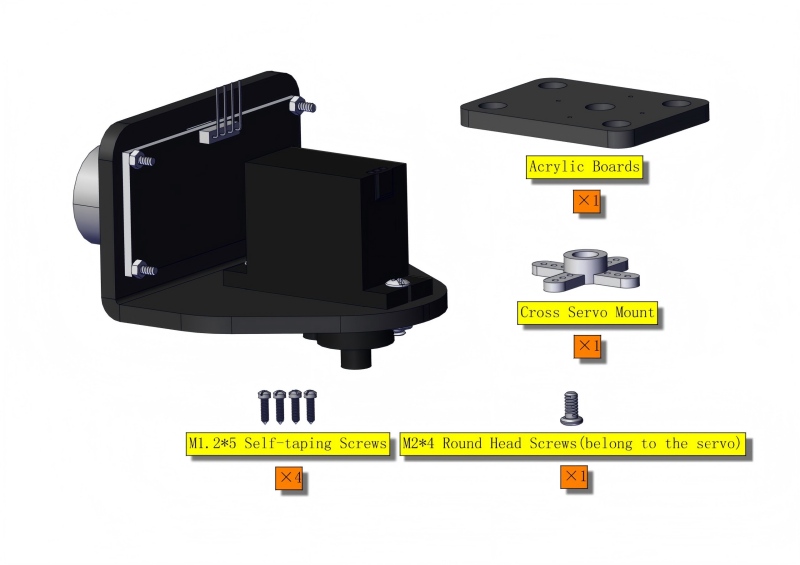
Establezca el ángulo del servo en 90°
Para ajustar el código del servo, selecciónelo según el curso.
1.Arduino: Descargue el archivo de código: Arduino
2.Kidsblock: Descargue el archivo de código: Kidsblock
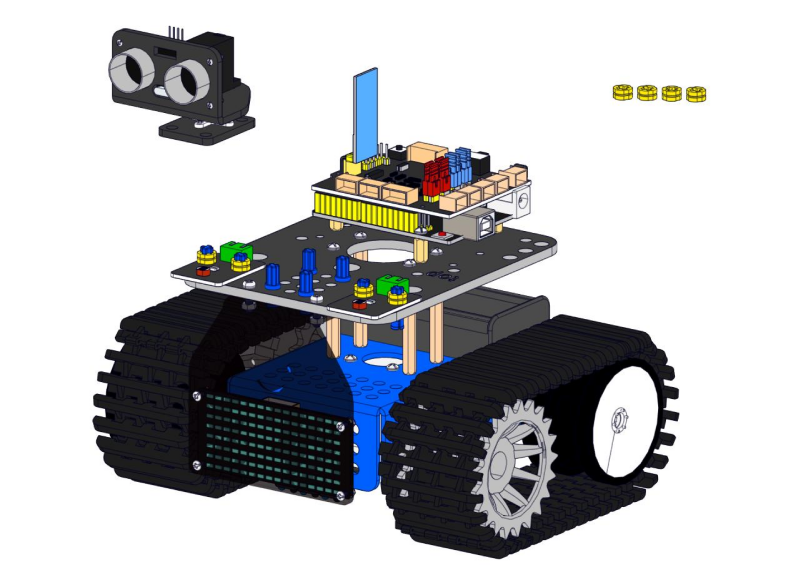
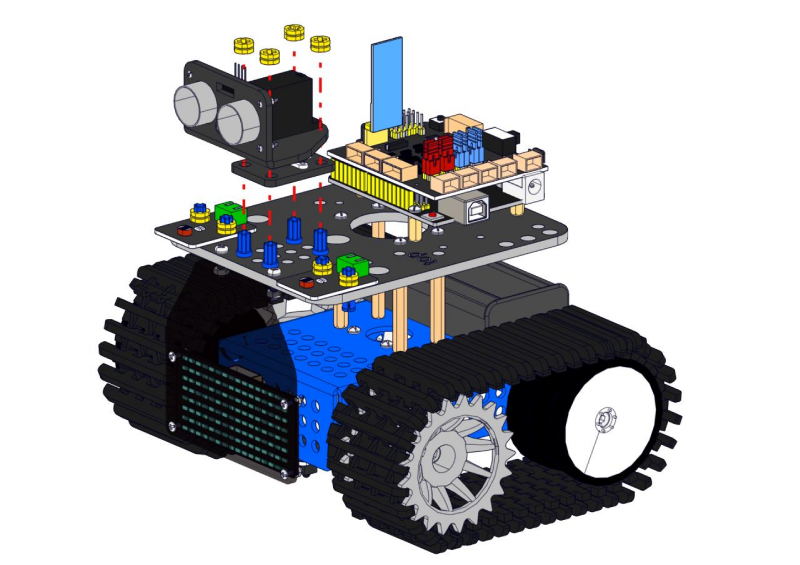
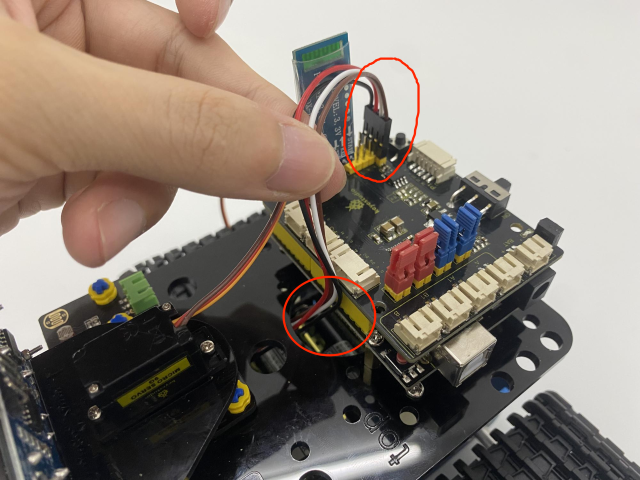
Después de inicializar el ángulo del servo, instale el módulo Bluetooth.
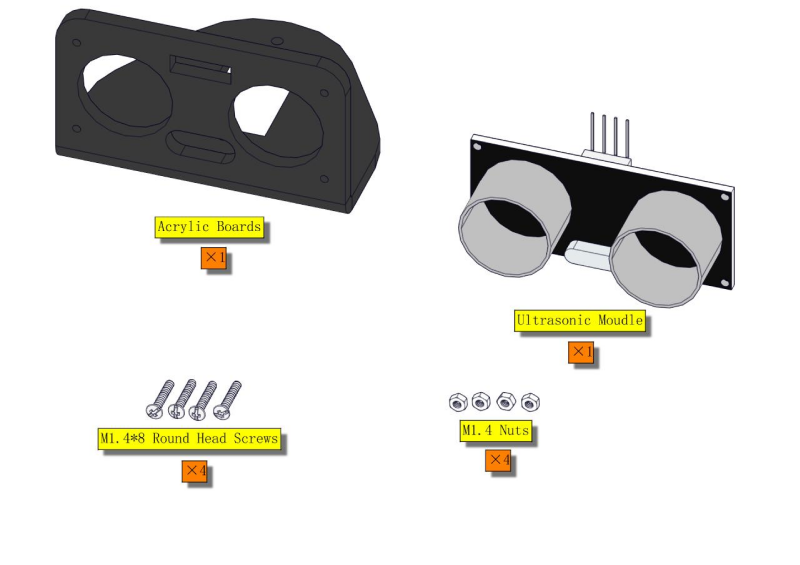
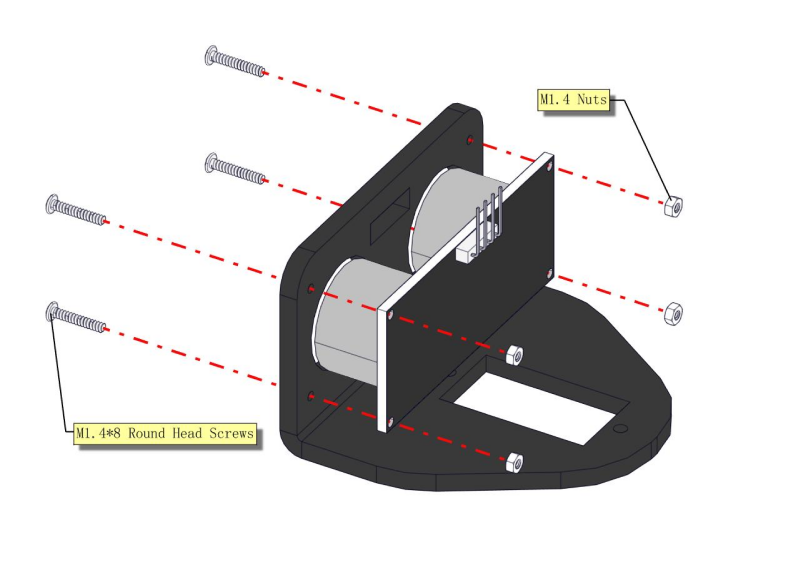
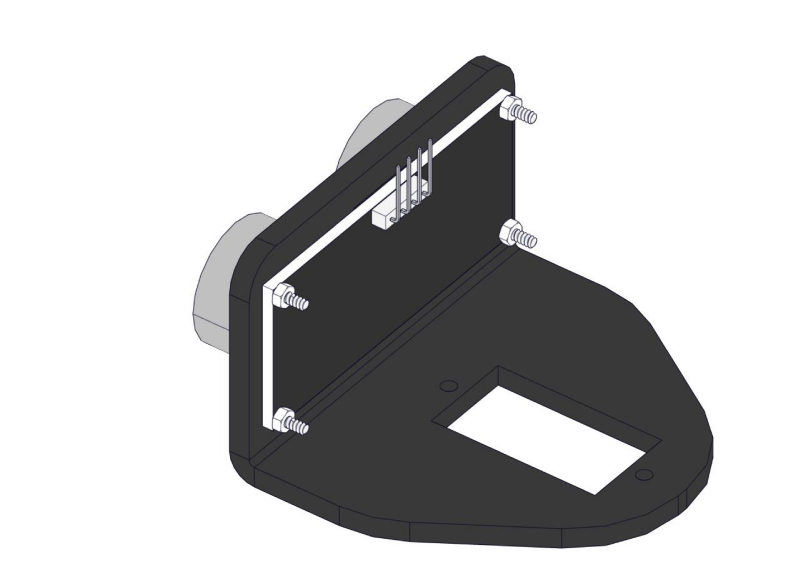
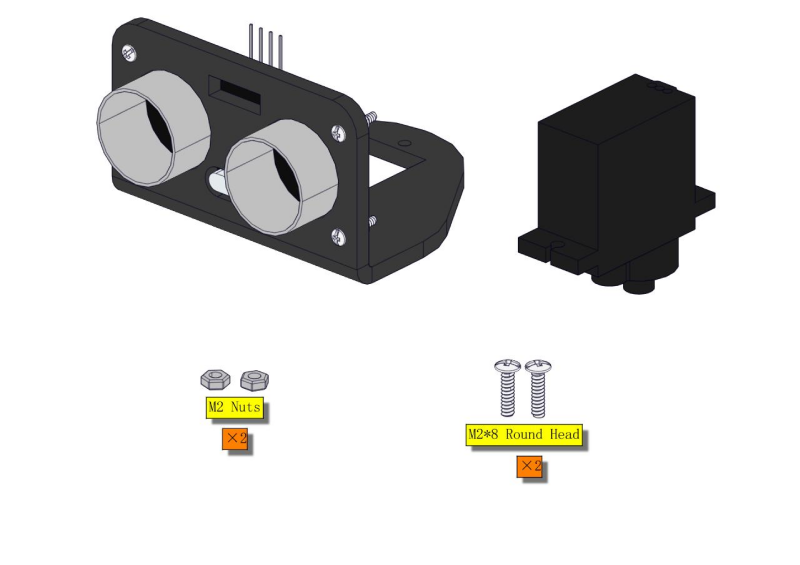
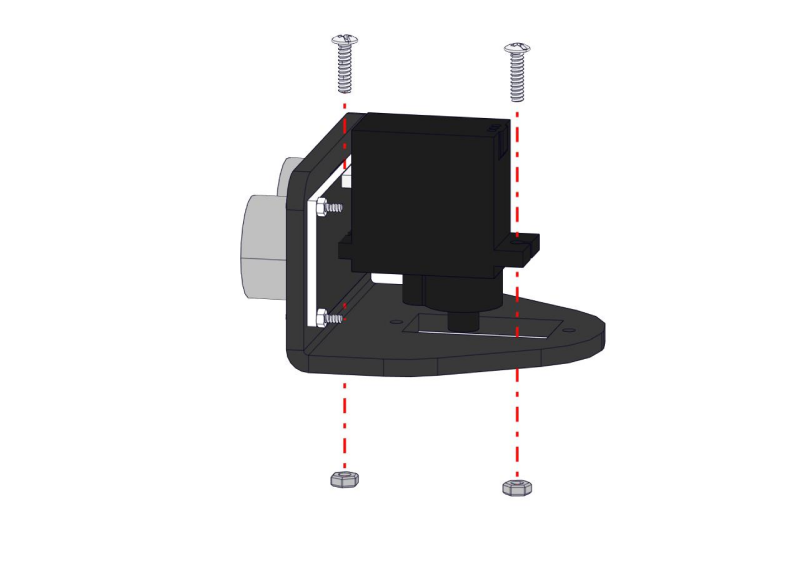
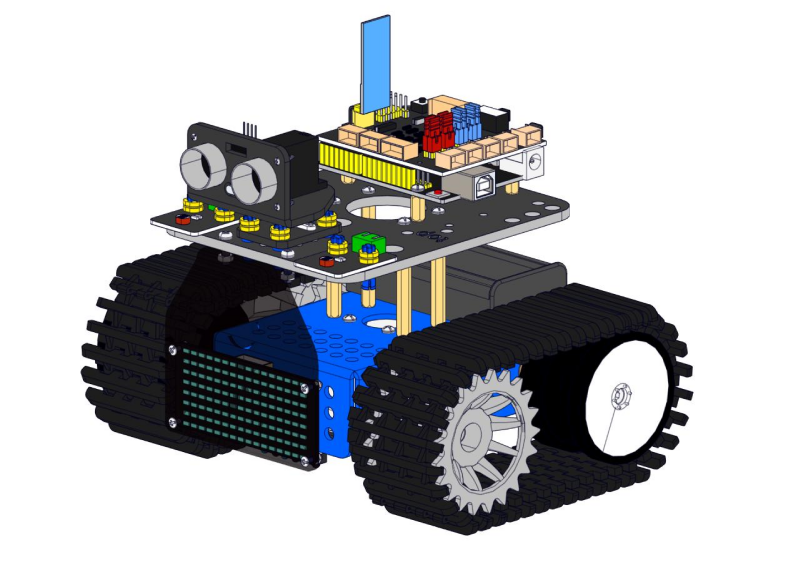
Mantenga el sensor ultrasónico paralelo a la placa.
Paso 9
Paso 10
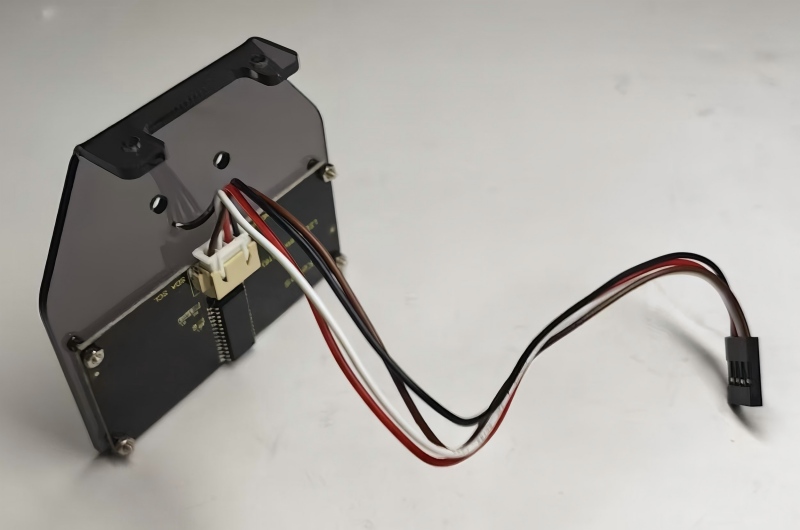
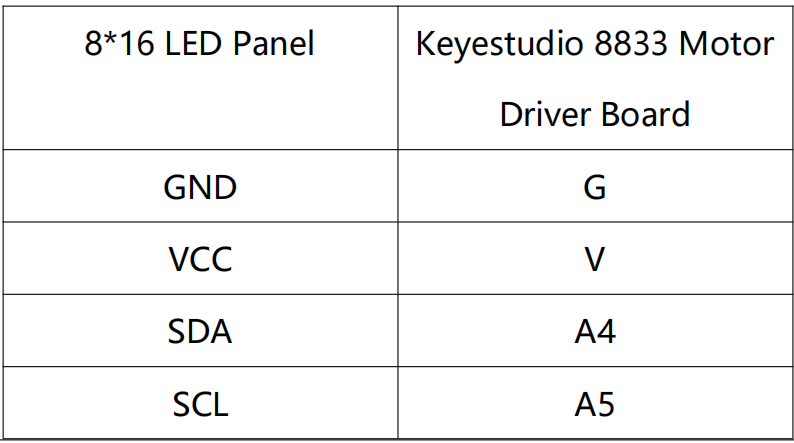
Cableado
Para el panel LED 8*16, conecte los cables a A4 y A5.
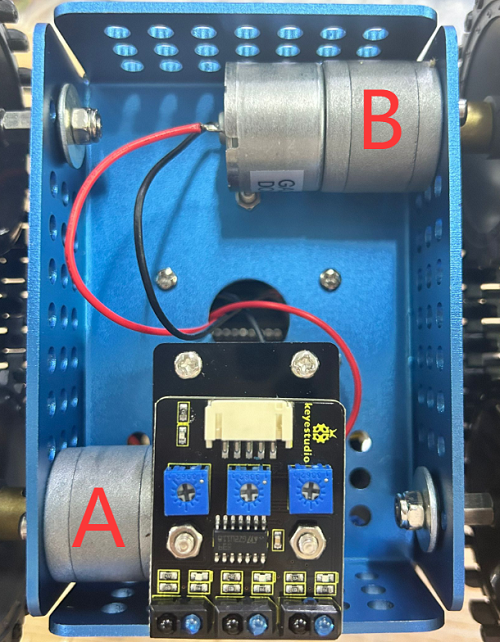
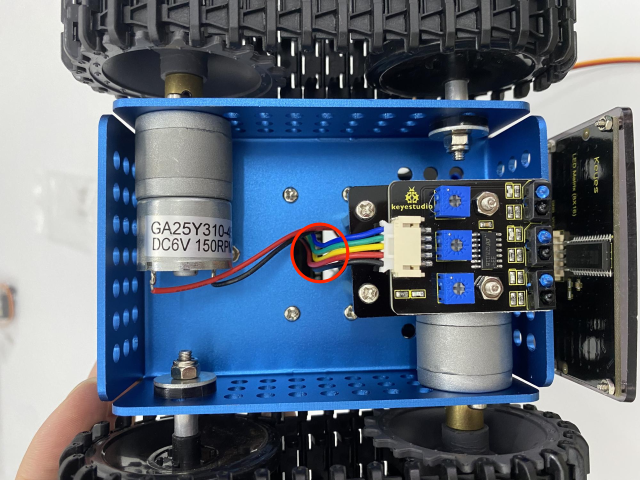
Conecte el motor A al puerto A y el motor B al puerto B.
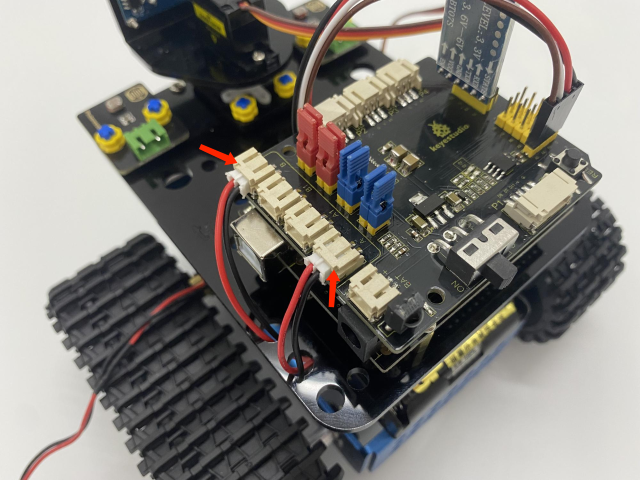
Conecte el cable de alimentación.
Sensor de seguimiento de línea (ver la imagen)

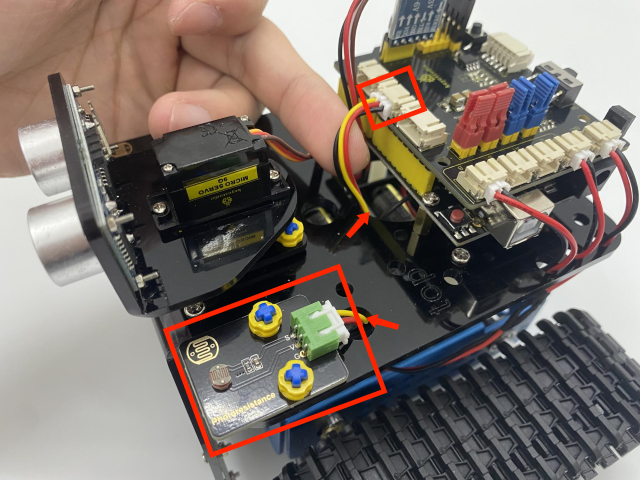
Cablee las fotorresistencias
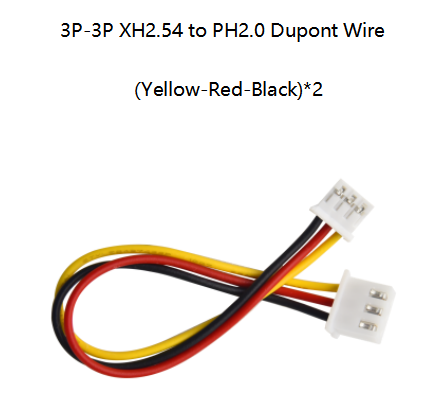
Fotorresistencia |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
Fotorresistencia |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
Cablee el sensor ultrasónico.

Sensor Ultrasónico |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
Cablee el servo (D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Marrón |
G |
Rojo |
V(5V) |
Naranja |
D10 |
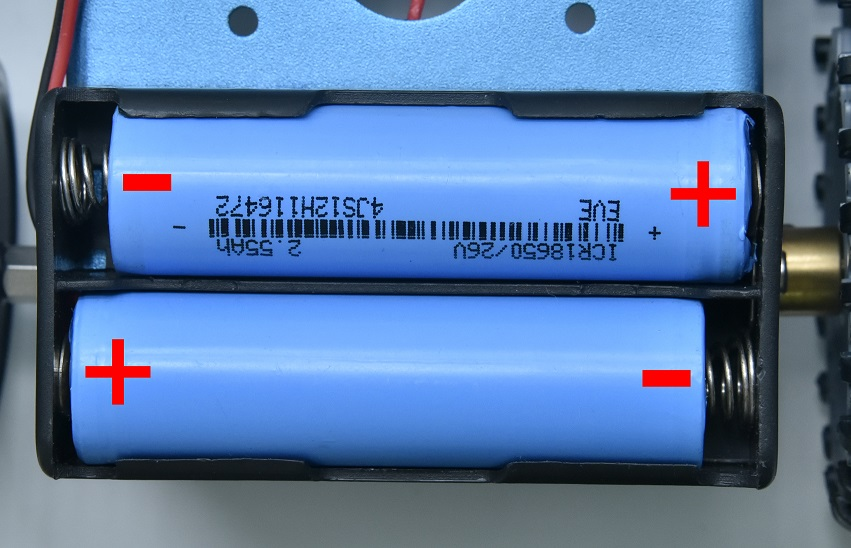
Utilizamos una batería de litio modelo 18650 con polo positivo en punta, cuya potencia y capacidad no son requisitos estrictos.