Bezüglich des Sprachwechsels im Tutorial beachten Sie bitte das folgende animierte Bild. Concernant le changement de langue dans le tutoriel, veuillez vous référer à l’image animée suivante. En relación con el cambio de idioma en el tutorial, consulte la siguiente imagen animada. Per quanto riguarda il cambio di lingua nel tutorial, fare riferimento alla seguente immagine animata. Jeśli chodzi o przełączanie języka w samouczku, zapoznaj się z poniższym obrazkiem animowanym. Wat betreft het veranderen van de taal in de tutorial, zie de volgende geanimeerde afbeelding. Angående språkbytet i handledningen, vänligen se följande animerade bild.
1. Présentation du produit
1.1 Introduction
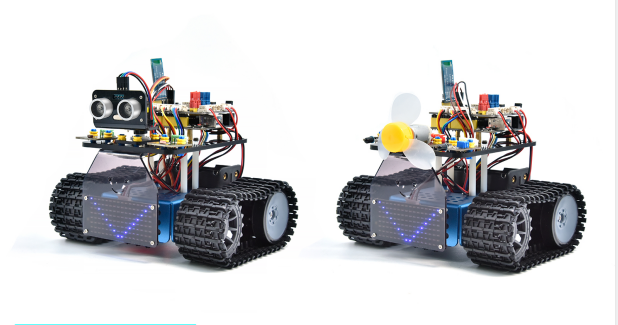
Ce robot tank éducatif STEM V3.1 a été récemment mis à niveau, avec l’ajout d’une fonction de suivi de ligne et d’extinction d’incendie. Il renforce vigoureusement la relation entre les enfants et les parents, et stimule l’imagination des enfants à travers la programmation et le codage.
Au cours du processus d’assemblage, vous pourrez découvrir ses multiples fonctions telles que le suivi de lumière, le suivi de ligne, la télécommande IR et BT, le réglage de vitesse, etc. De plus, il y a de petites pièces qui peuvent vous aider à assembler le robot.
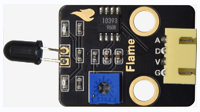
Il comprend des capteurs et modules de base tels qu’un capteur de flamme, un capteur BT, un capteur d’évitement d’obstacles, un capteur de suivi de ligne et un capteur ultrasonique.
Les deux tutoriels pour le code en langage C de l’Arduino IDE et la programmation graphique KidsBlock conviennent également aux passionnés de tous âges.
C’est vraiment le meilleur choix pour vous.
1.2 Caractéristiques
Multifonctions : Confinement, suivi de ligne, extinction d’incendie, suivi de lumière, télécommande IR et BT, contrôle de vitesse, etc.
Facile à construire : assemblez le robot avec quelques pièces.
Grande robustesse : supports en alliage d’aluminium, moteurs métalliques, roues de haute qualité.
Grande extensibilité : connectez de nombreux capteurs et modules via la carte d’extension du pilote de moteur et les pièces LEGO.
Contrôles multiples : télécommande IR, contrôle par application (systèmes iOS et Android).
Programmation de base : code en langage C de l’Arduino IDE et programmation graphique KidsBlock.
1.3 Paramètres
Tension de fonctionnement : 5V
Tension d’entrée : 6-9V
Courant de sortie maximum : 1,5A
Puissance dissipée maximale : 32W
Vitesse du moteur : 5V 200 tr/min
Mode de pilotage du moteur : double pont en H (HR8833)
Angle de détection ultrasonique : <15°
Distance de détection ultrasonique : 2cm-300cm
Distance de télécommande infrarouge : 10 mètres (mesurée)
Distance de télécommande BT : 30 mètres (mesurée)
1.4 Liste du kit
N° |
Nom |
Qté |
Image |
|---|---|---|---|
1 |
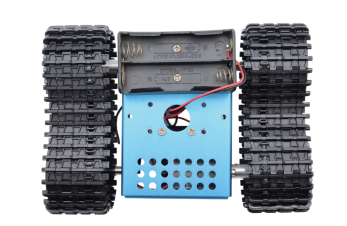
Assemblage de la base |
1 |
|
2 |
Carte de développement |
1 |
|
3 |
Carte d’extension du pilote moteur |
1 |
|
4 |
Module BLE BT |
1 |
|
5 |
Capteur ultrasonique HC-SR04 |
1 |
|
6 |
Panneau LED Keyestudio 8*16 |
1 |
|
7 |
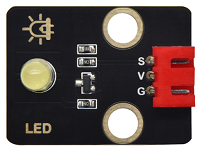
Module LED jaune |
1 |
|
8 |
Capteur de flamme |
2 |
|
9 |
Module moteur 130 |
1 |
|
10 |
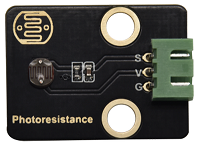
Photorésistance |
2 |
|
11 |
Plaque acrylique pour panneau LED 8*16 |
1 |
|
12 |
Plaque acrylique supérieure |
1 |
|
13 |
Plaque acrylique |
1 |
|
14 |
Télécommande |
1 |
|
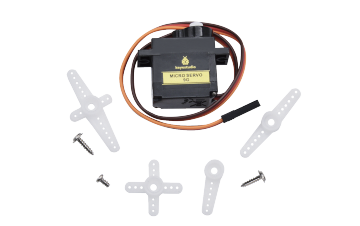
15 |
Servo |
1 |
|
16 |
Câble USB |
1 |
|
17 |
Tube d’enroulement |
1 |
|
18 |
Tournevis 3,0*40MM |
1 |
|
19 |
Colliers 3*100MM |
5 |
|
20 |
Clé L type M2.5 |
1 |
|
21 |
Clé L type M3 |
1 |
|
22 |
Clé L type M1.5 |
1 |
|
23 |
Carton |
1 |
|
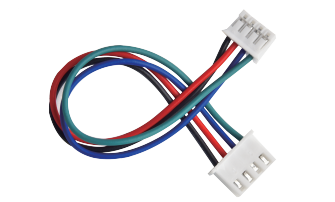
24 |
Câble Dupont 4P M-F PH2.0mm vers 2.54 |
1 |
|
25 |
Câble Dupont 4P HX-2.54 |
1 |
|
26 |
Câble Dupont 5P JST-PH2.0MM |
1 |
|
27 |
Câble Dupont 3P-3P XH2.54 vers 2.54 |
1 |
|
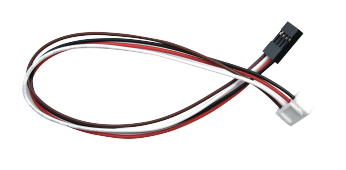
28 |
Câble Dupont 3P-3P XH2.54 vers PH2.0 |
2 |
|
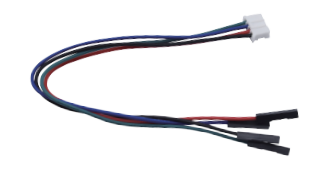
29 |
Câble Dupont 4P-3P XH2.54 vers PH2.0 |
2 |
|
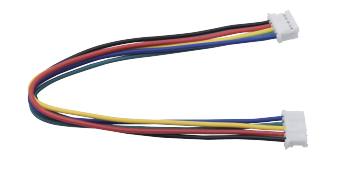
30 |
Câble Dupont 4P XH2.54 vers PH2.0 |
1 |
|
31 |
Vis à tête ronde M1.4*8MM |
6 |
|
32 |
Écrous M1.4 |
6 |
|
33 |
Écrous M2 |
8 |
|
34 |
Vis à tête ronde M2*8MM |
8 |
|
35 |
Vis à tête ronde M1.2*5MM |
6 |
|
36 |
Vis à tête ronde M3*6MM |
18 |
|
37 |
Vis à tête plate M3*10MM |
3 |
|
38 |
Écrous M3 |
3 |
|
39 |
Entretoise en cuivre double passage M3*10MM |
4 |
|
40 |
Entretoise en cuivre double passage M3*45MM |
4 |
|
41 |
Axe technique avec rainures de friction |
11 |
|
42 |
Bague technique 4265c |
11 |
|
43 |
Cavalier bleu |
4 |
|
44 |
Cavalier rouge |
4 |
|
45 |
Clé à usage simple |
1 |
|
46 |
Clé à double usage |
1 |
|
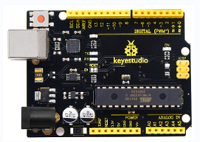
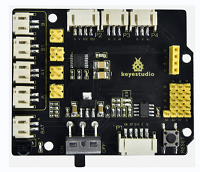




























1.5 Carte de développement Keyestudio V4.0
Vous devez savoir que la carte de développement Keyestudio V4.0 est le cœur de ce robot voiture intelligent.
La carte de développement Keyestudio V4.0 est basée sur le microcontrôleur ATmega328P, et utilise une puce CP2102 comme convertisseur UART vers USB.
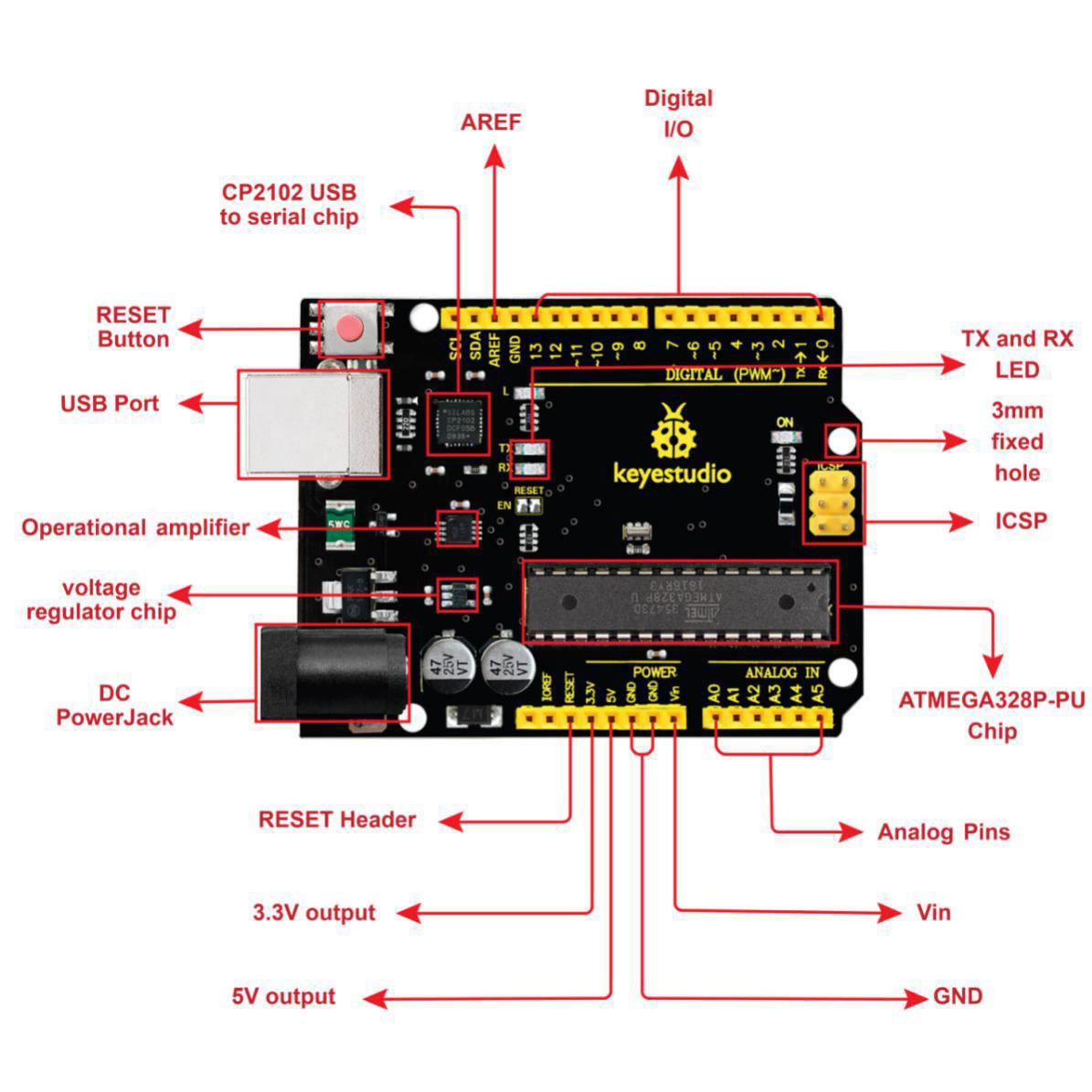
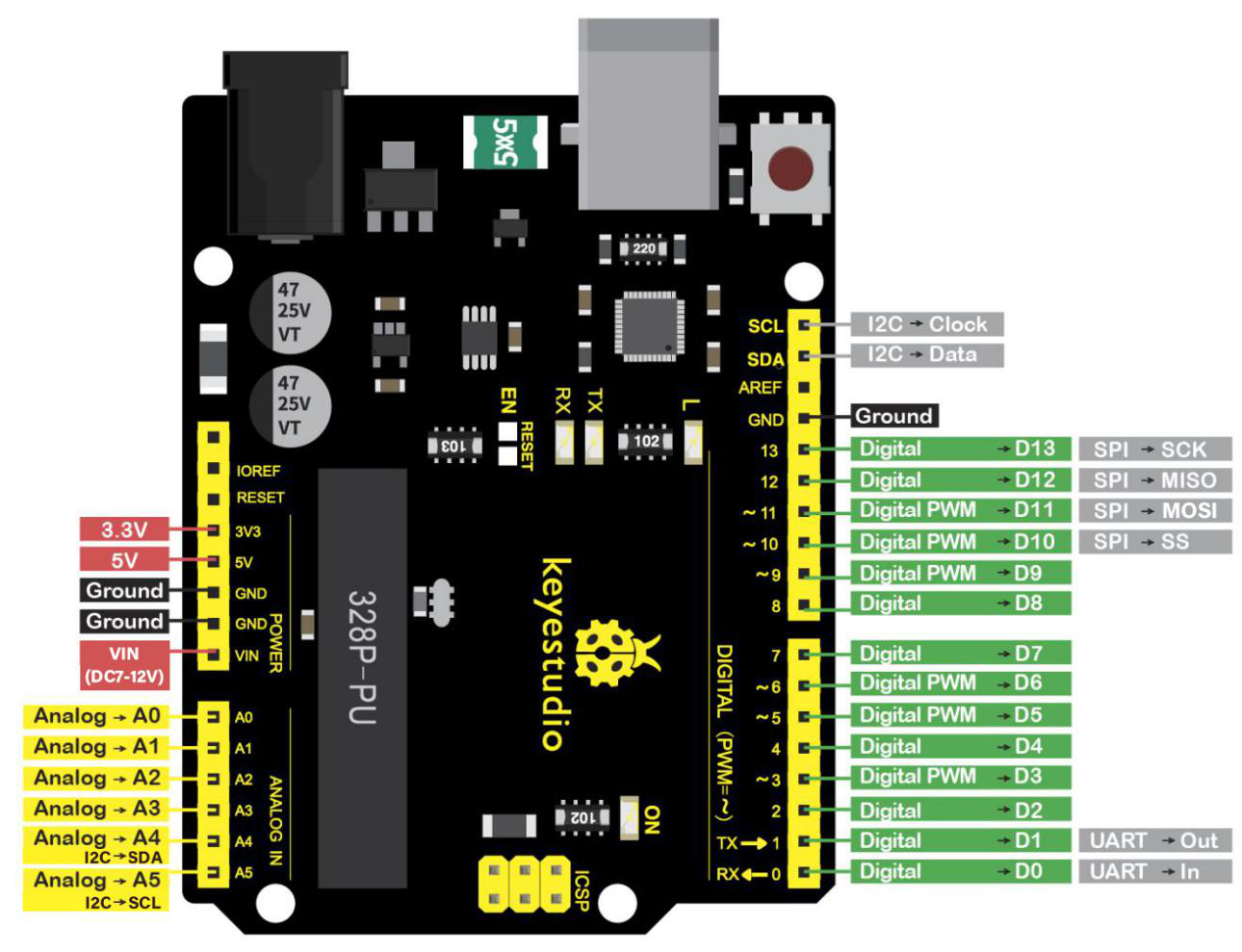
Elle dispose de 14 broches d’entrée/sortie numériques (dont 6 peuvent être utilisées comme sorties PWM), 6 entrées analogiques, un cristal de quartz 16 MHz, une connexion USB, un connecteur d’alimentation, 2 connecteurs ICSP et un bouton de réinitialisation.
Nous pouvons l’alimenter avec un câble USB, le connecteur d’alimentation DC externe (DC 7-12V) ou les broches femelles Vin/GND (DC 7-12V).
Microcontrôleur |
ATmega328P-PU |
|---|---|
Tension de fonctionnement |
5V |
Tension d’entrée (recommandée) |
DC7-12V |
Broches E/S numériques |
14 (D0-D13) (dont 6 fournissent une sortie PWM) |
Broches E/S numériques PWM |
6 (D3, D5, D6, D9, D10, D11) |
Broches d’entrée analogique |
6 (A0-A5) |
Courant CC par broche E/S |
20 mA |
Courant CC pour la broche 3,3V |
50 mA |
Mémoire Flash |
32 KB (ATmega328P-PU) dont 0,5 KB utilisés par le bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Vitesse d’horloge |
16 MHz |
LED_BUILTIN |
D13 |