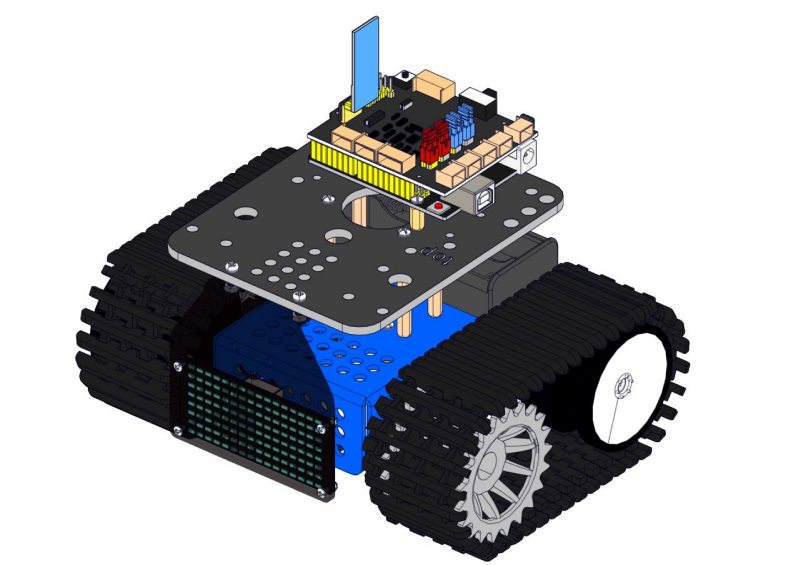
2. Installation du Produit
Attention : Réglez l’angle initial du servo et retirez les films protecteurs des cartes avant d’installer ce robot.

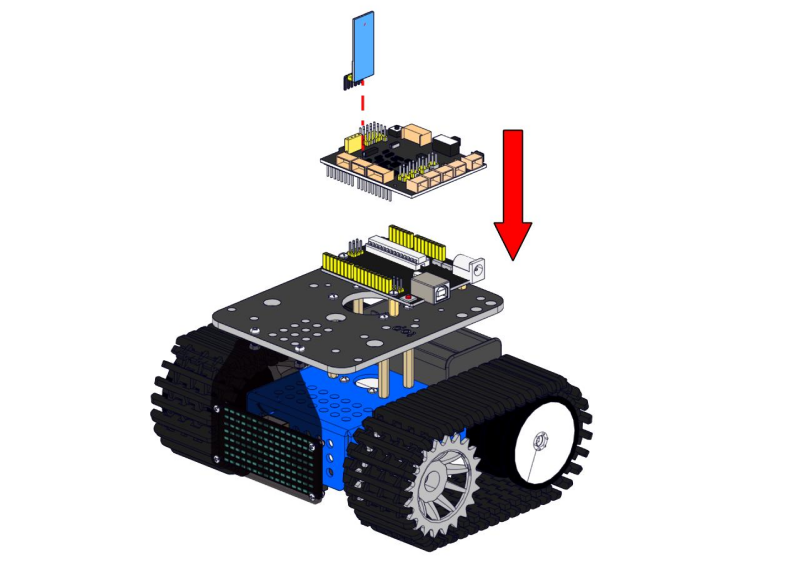
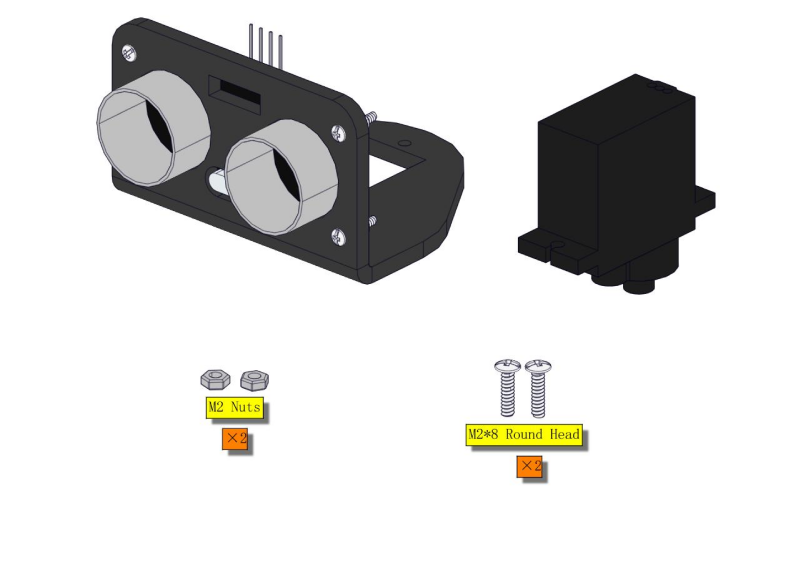
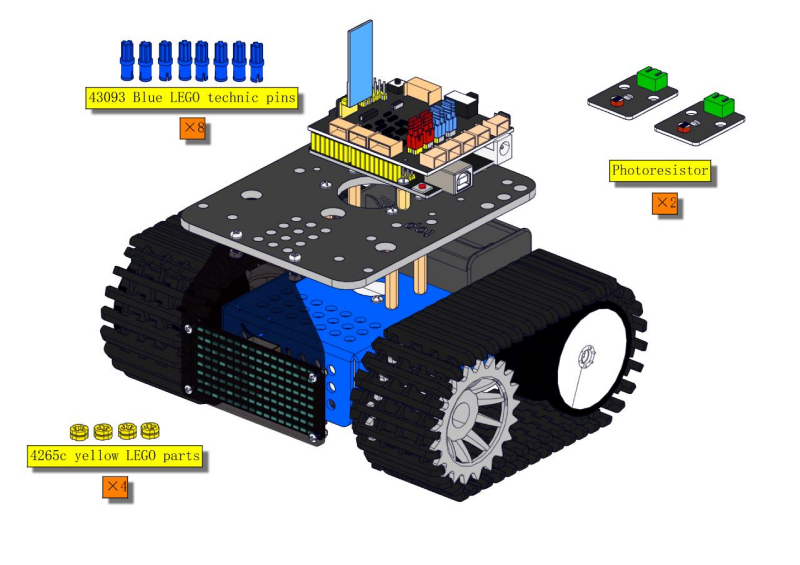
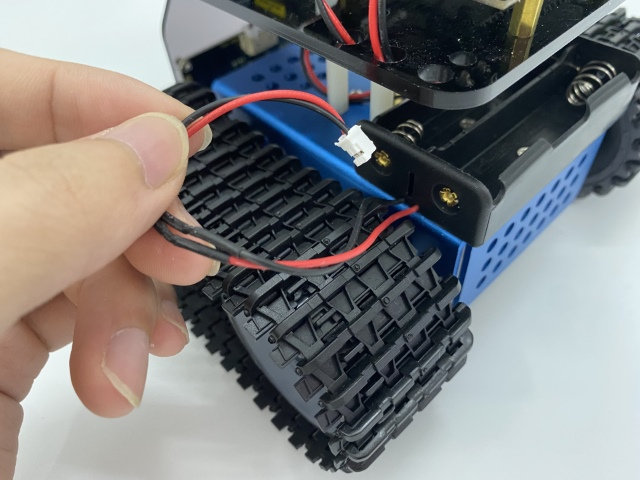
Étape 1

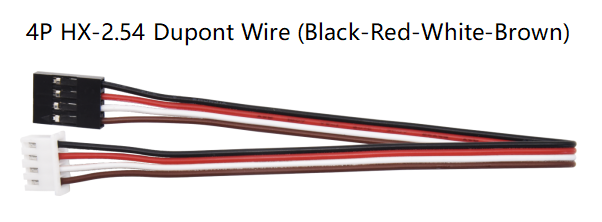
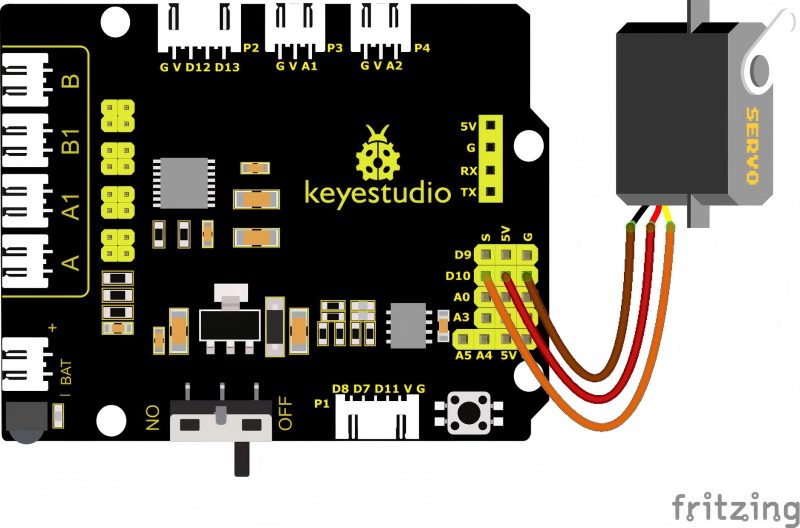
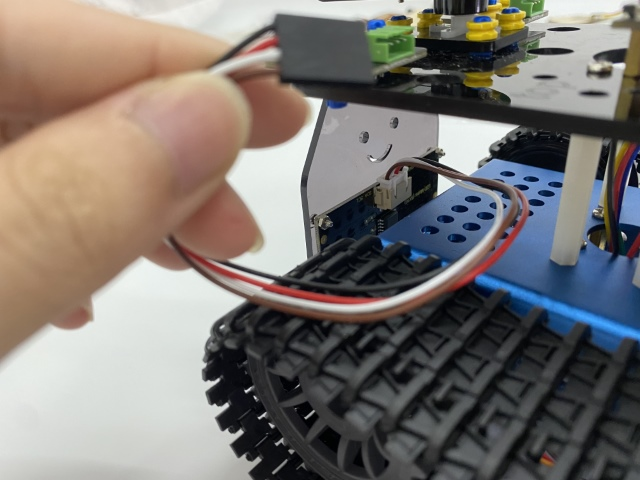
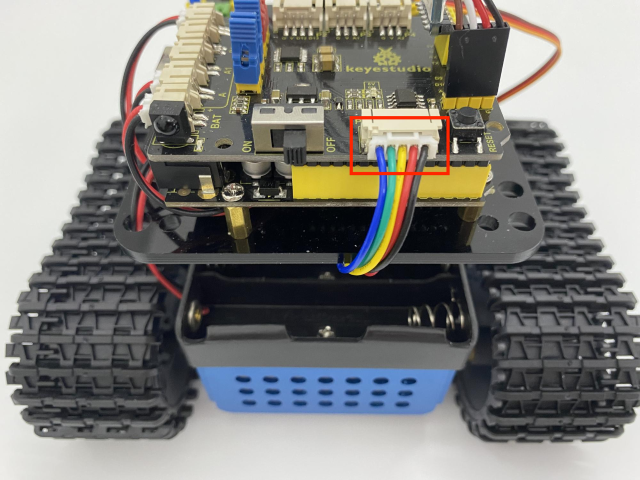
Veuillez d’abord effectuer le câblage.
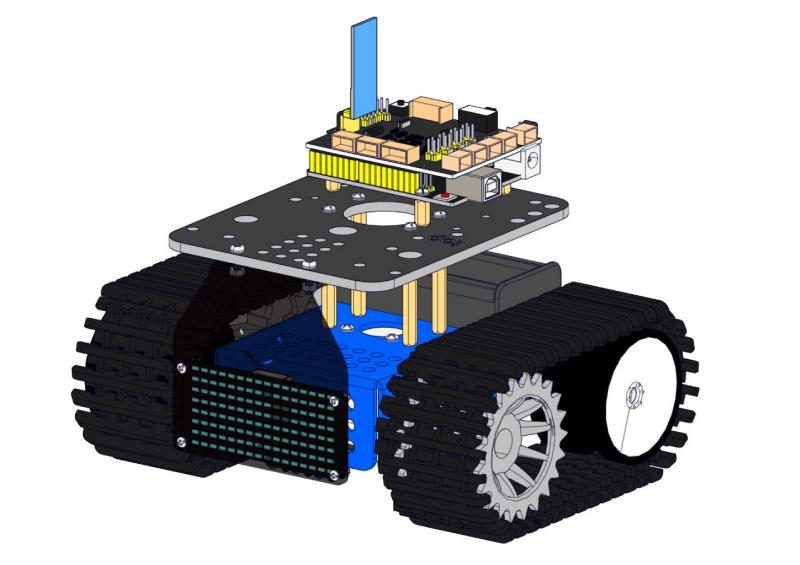
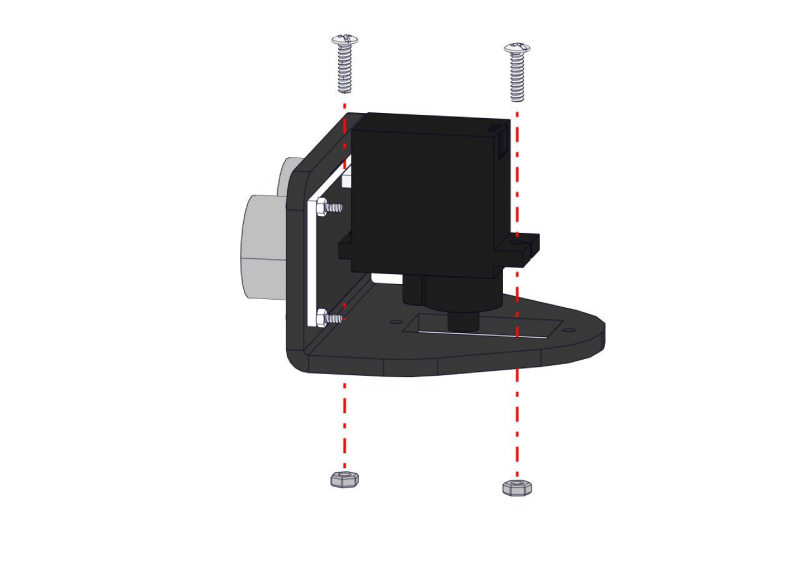
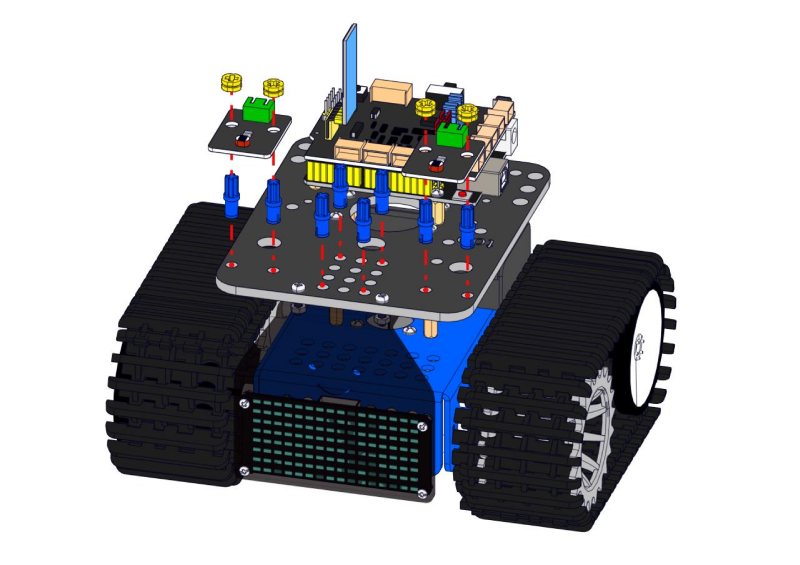
Étape 2
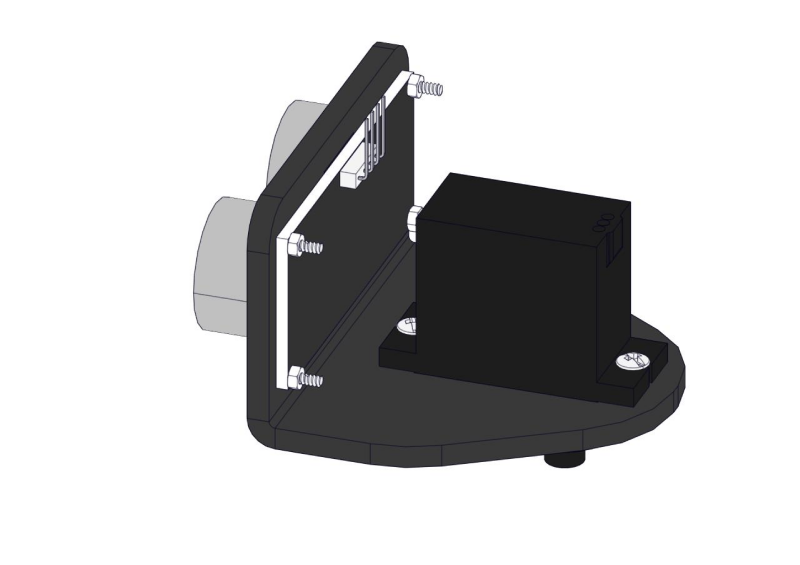
Étape 3

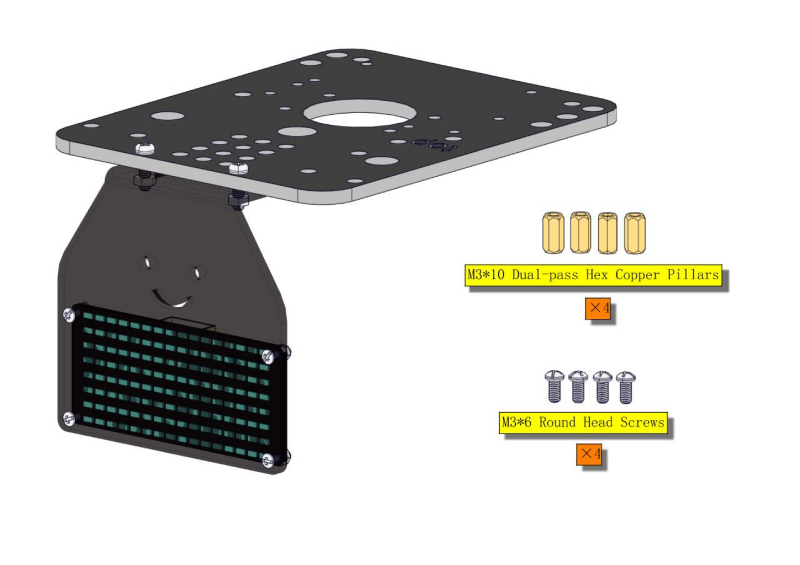
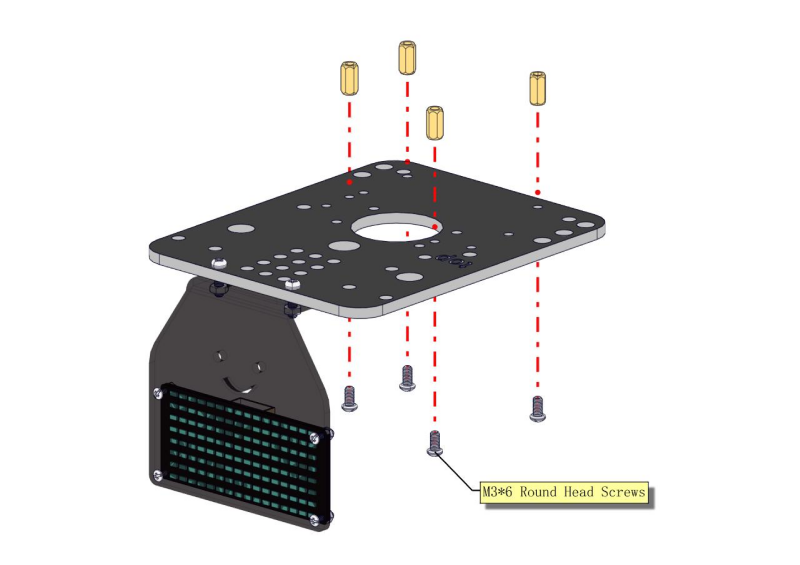
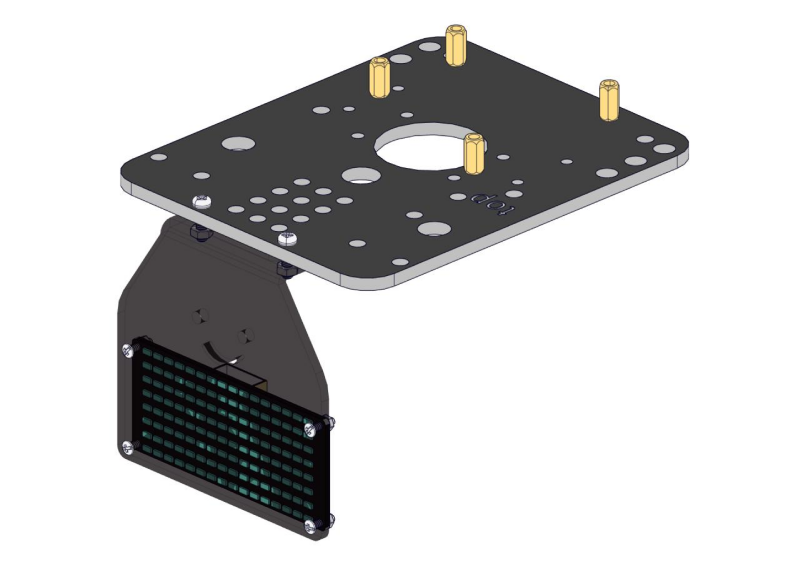
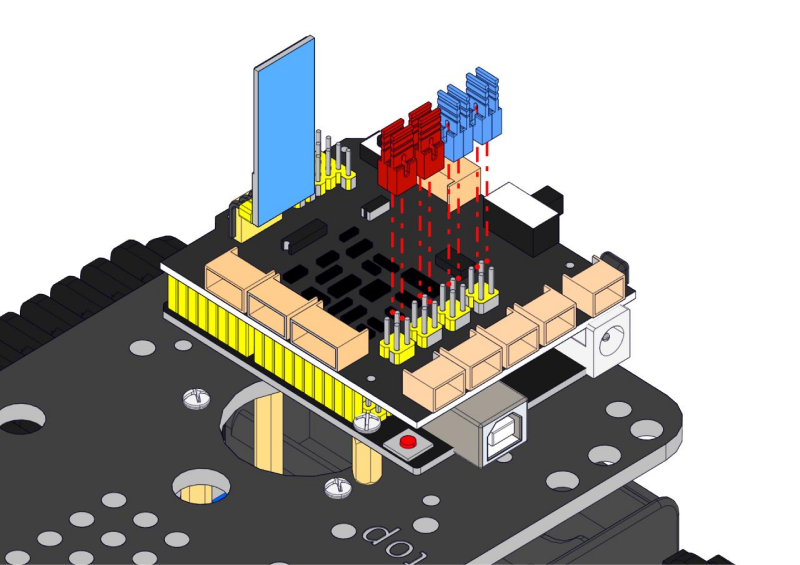
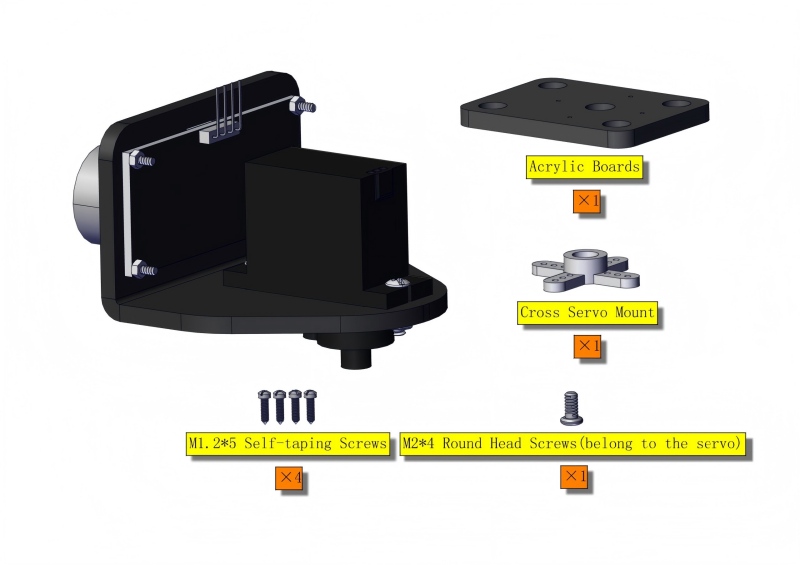
Étape 4
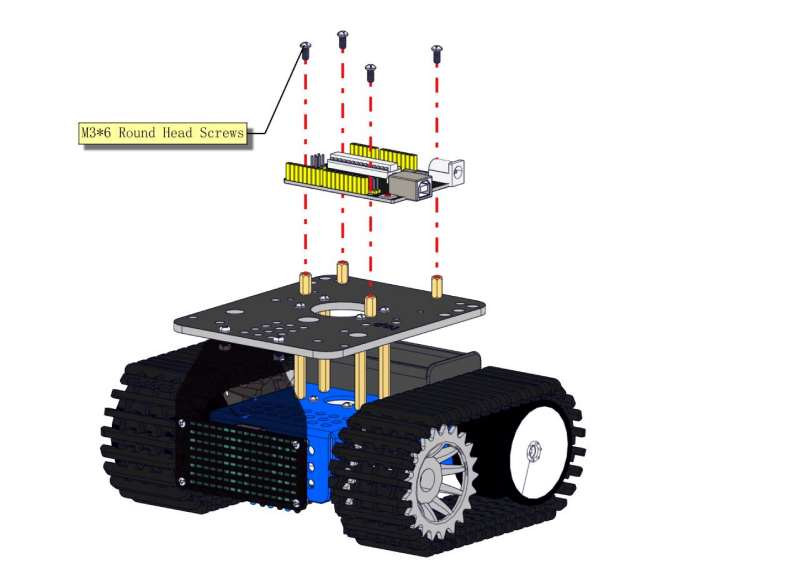
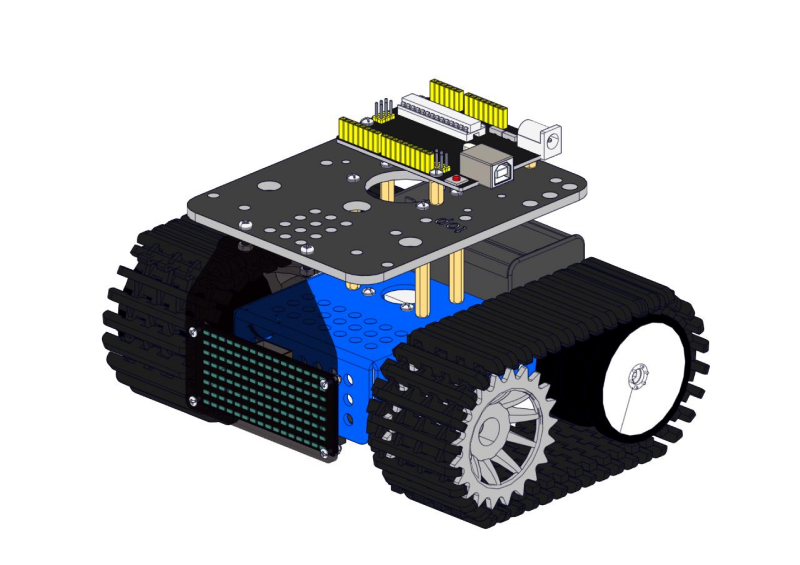
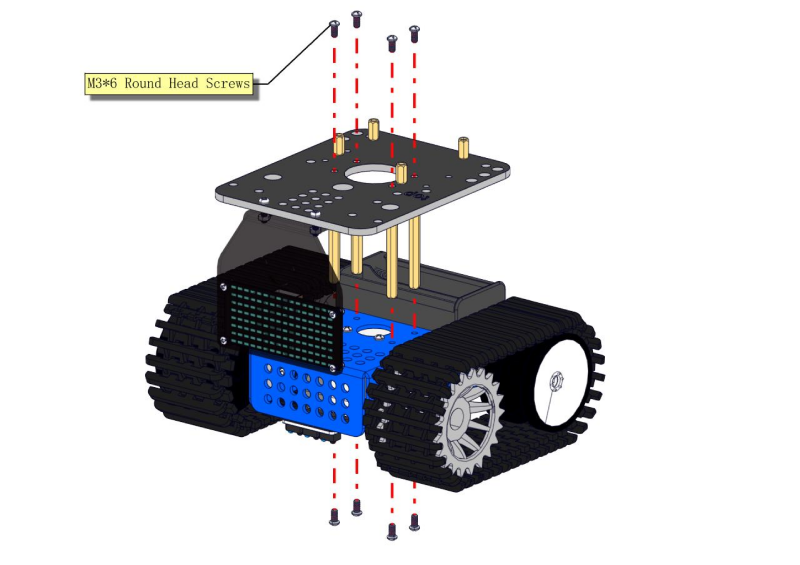
Étape 5
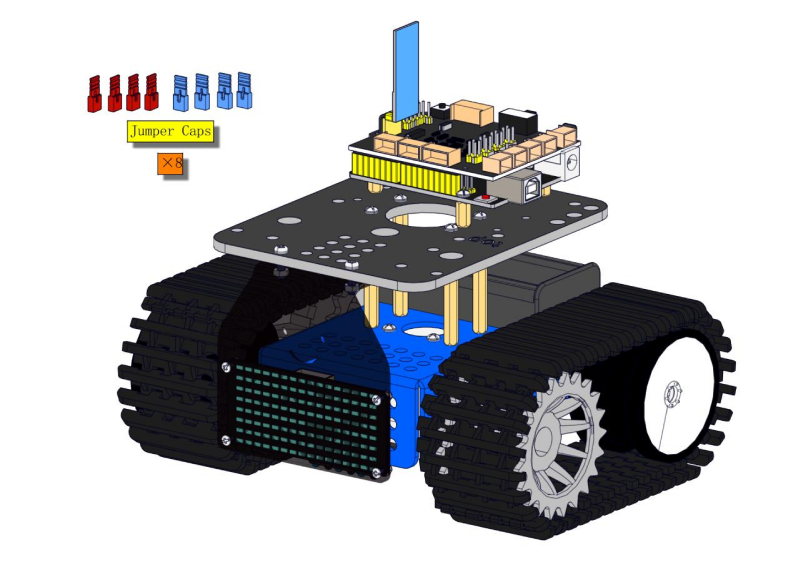
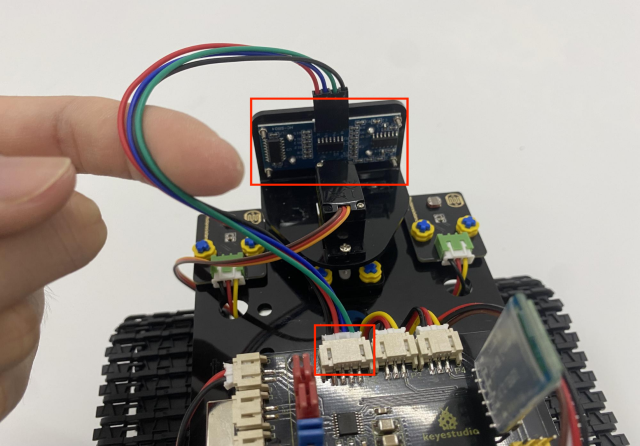
Notez la direction des cavaliers.
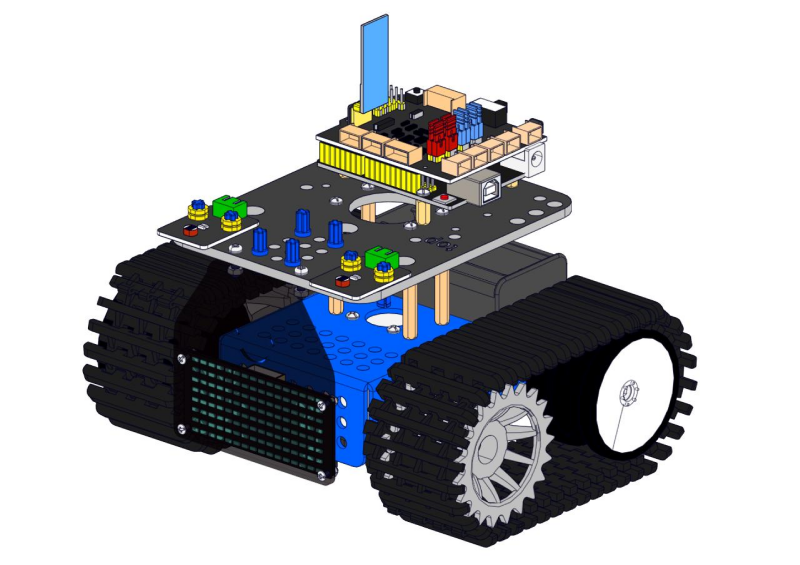
Étape 6
Étape 7
Étape 8
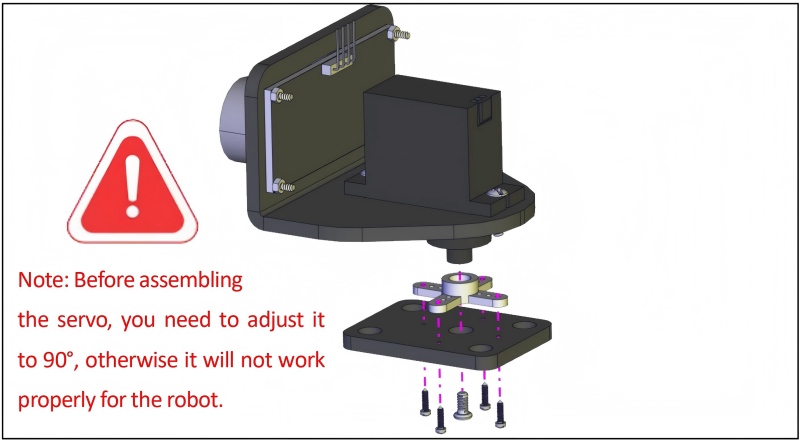
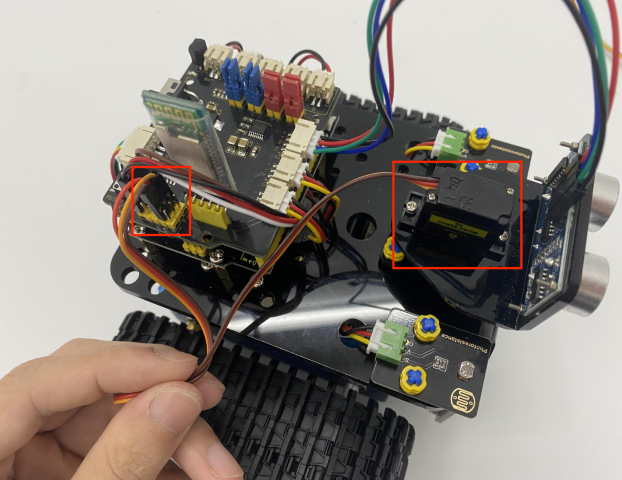
(Il est nécessaire de régler l’angle du servo)
Régler l’angle du servo à 90°
Pour ajuster le code du servo, veuillez le sélectionner selon le cours.
1.Arduino : Téléchargez le fichier de code : Arduino
2.Kidsblock : Téléchargez le fichier de code : Kidsblock
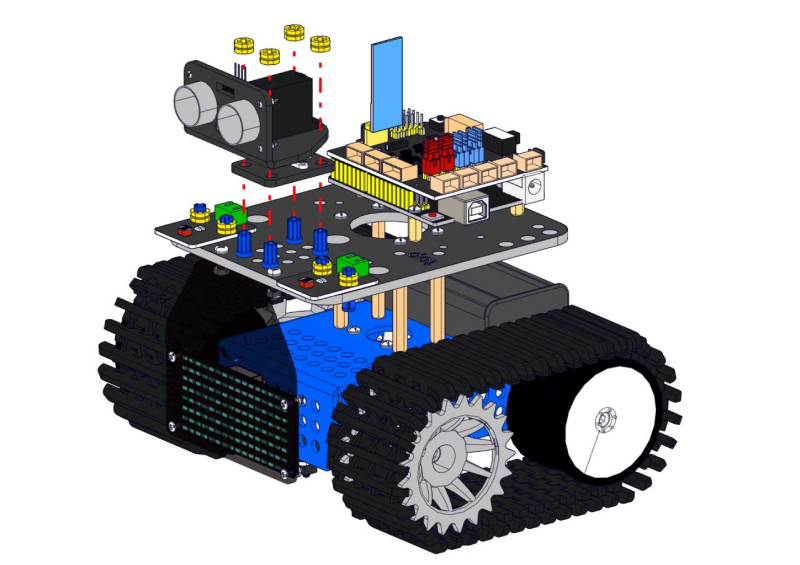
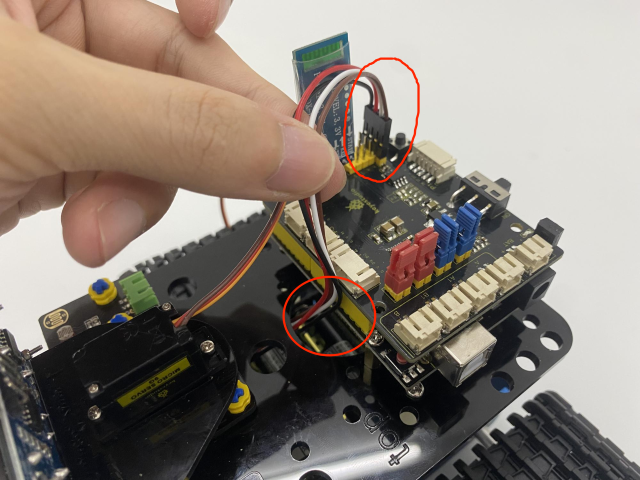
Après avoir initialisé l’angle du servo, installez le module Bluetooth.
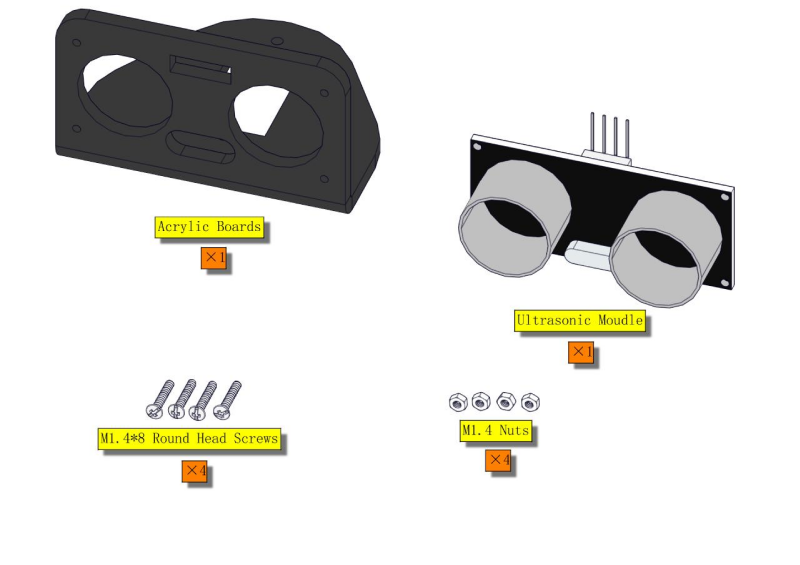
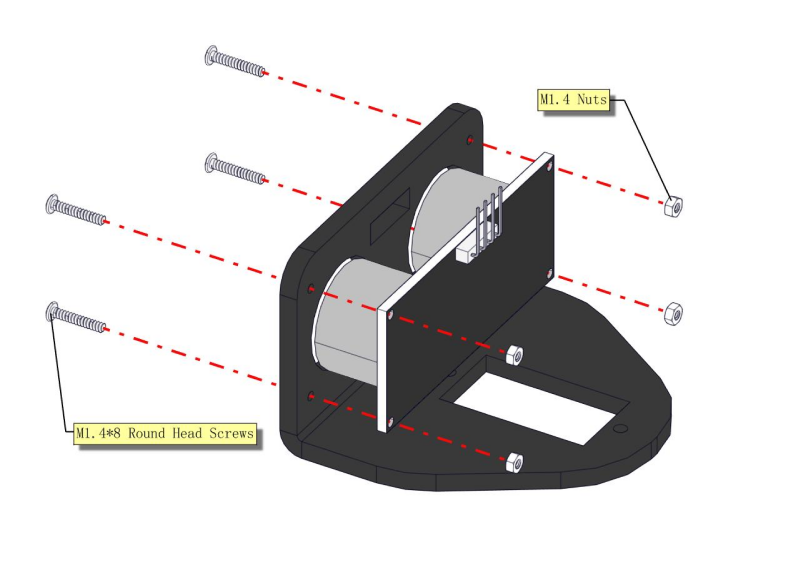
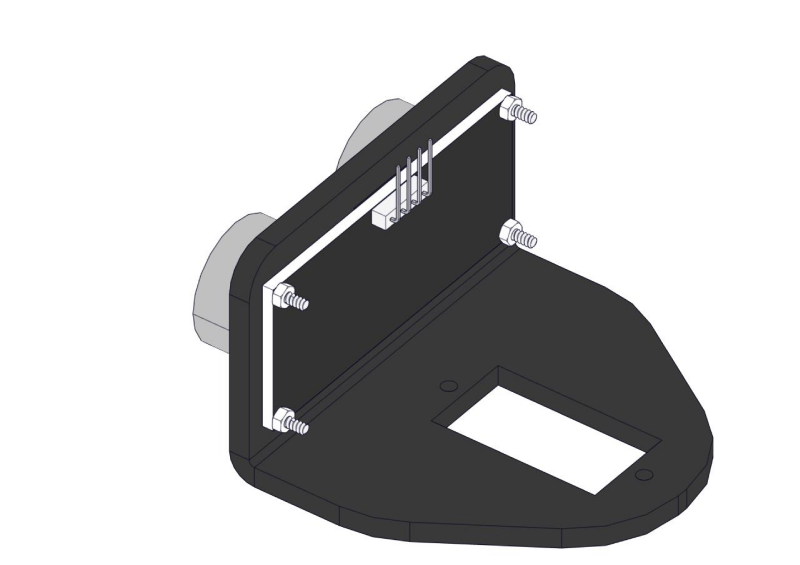
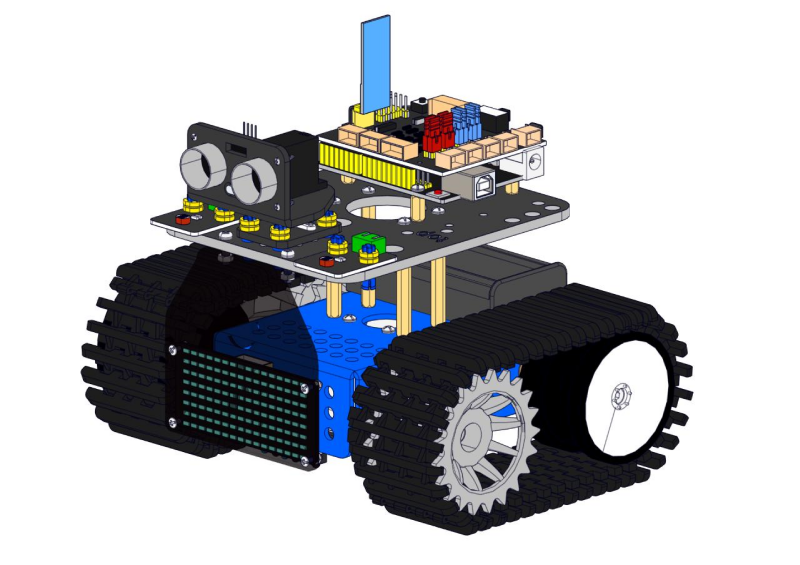
Gardez le capteur ultrasonique parallèle à la carte.
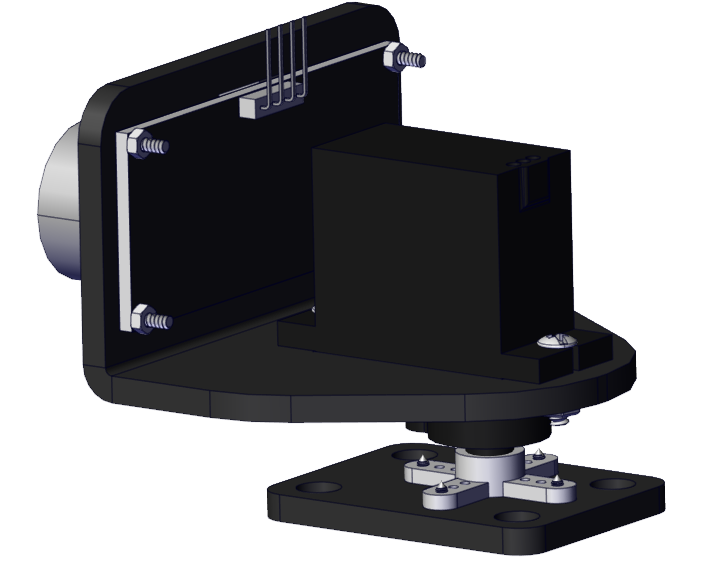
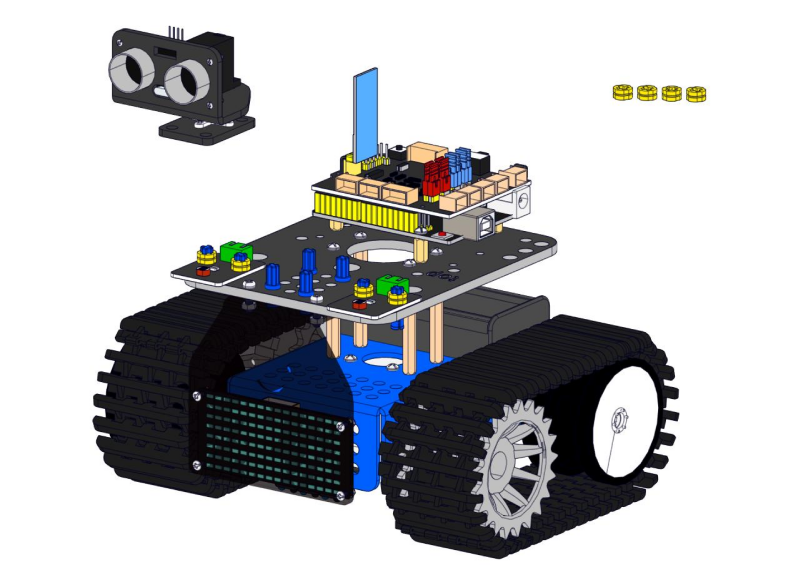
Étape 9
Étape 10
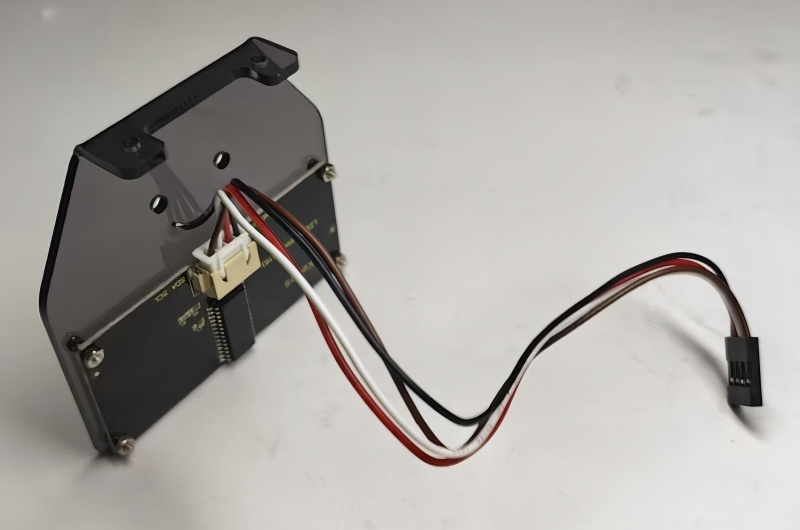
Câblage
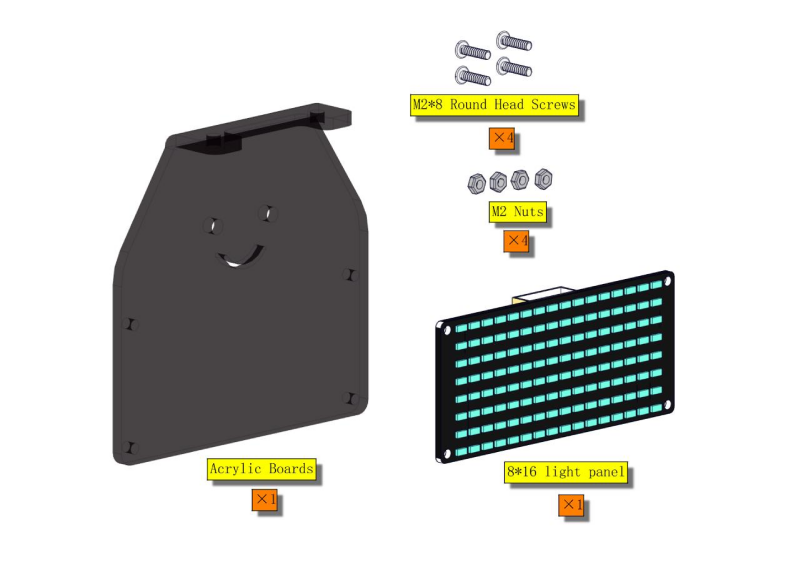
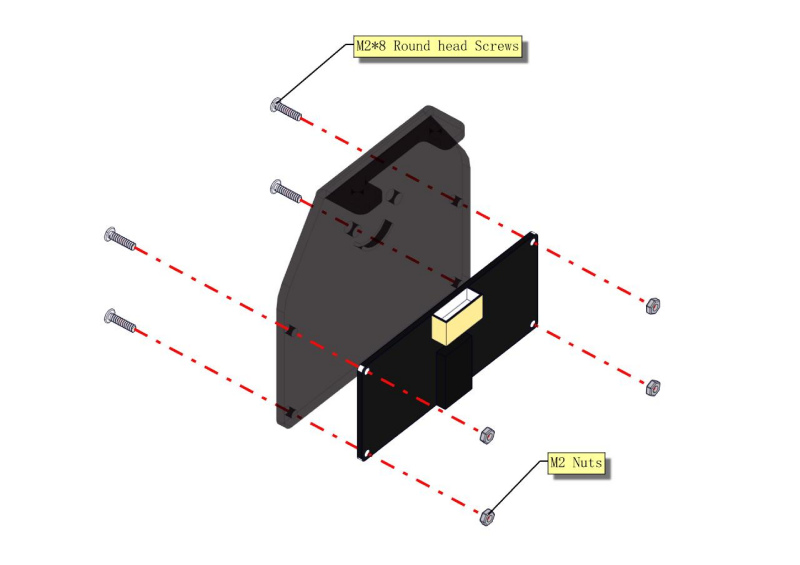
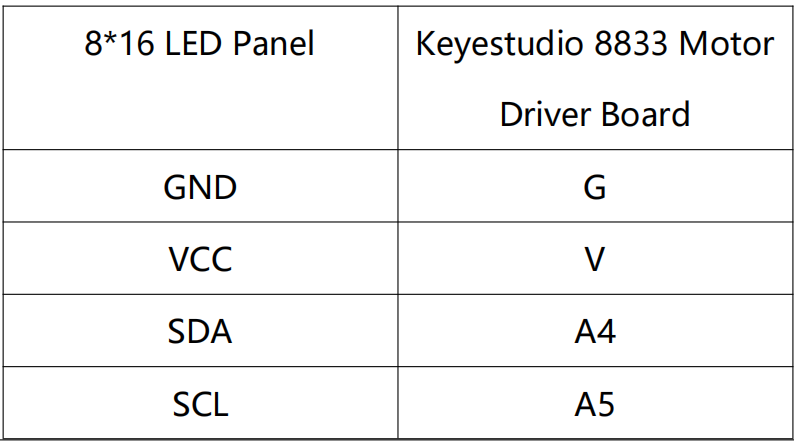
Pour le panneau LED 8*16, connectez les fils à A4 et A5.
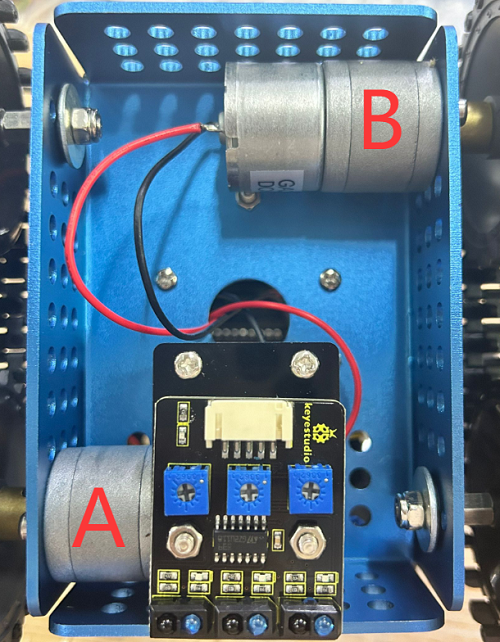
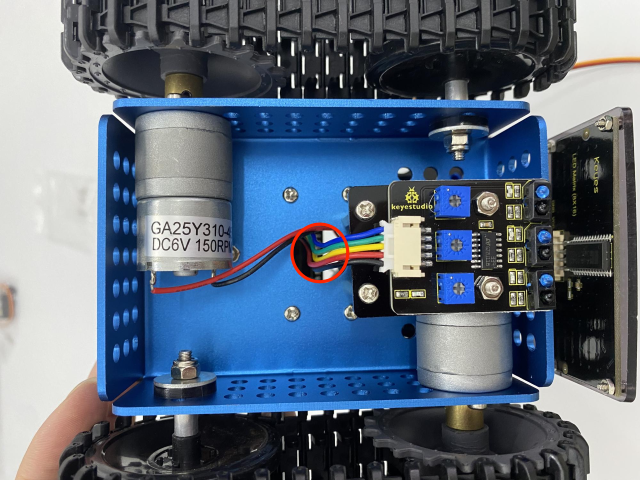
Connectez le moteur A au port A et le moteur B au port B.
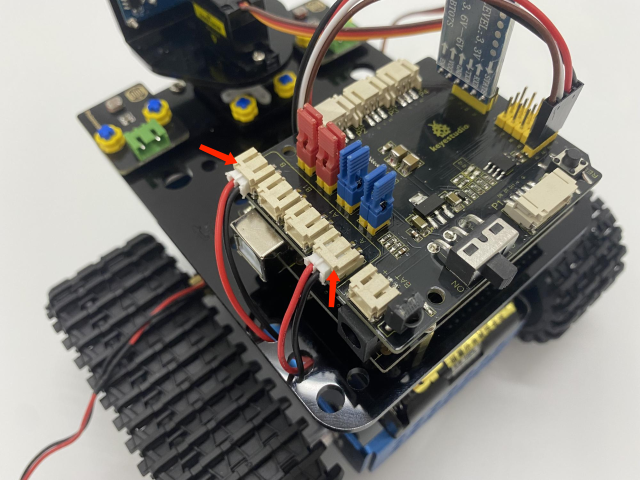
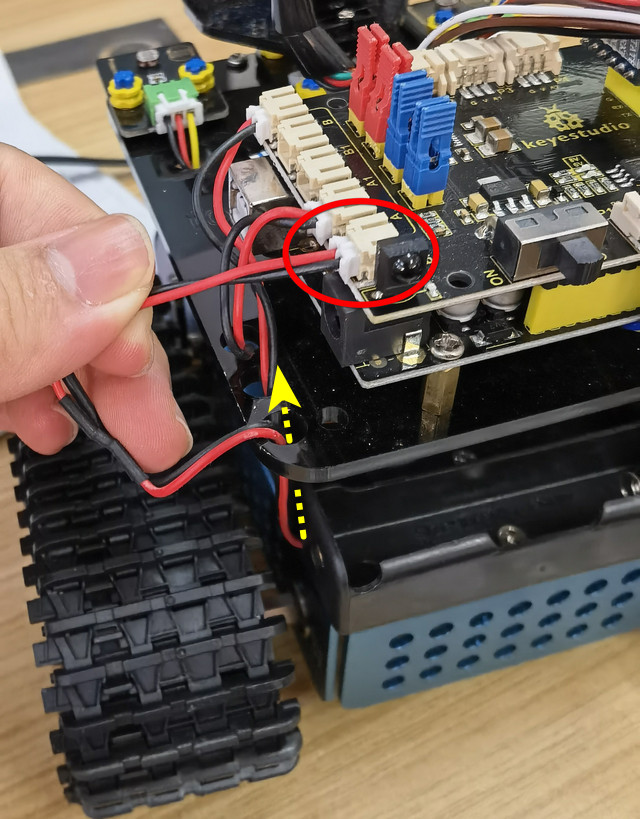
Connectez le fil d’alimentation.
Capteur de suivi de ligne (voir l’image)

Câblage des photorésistances
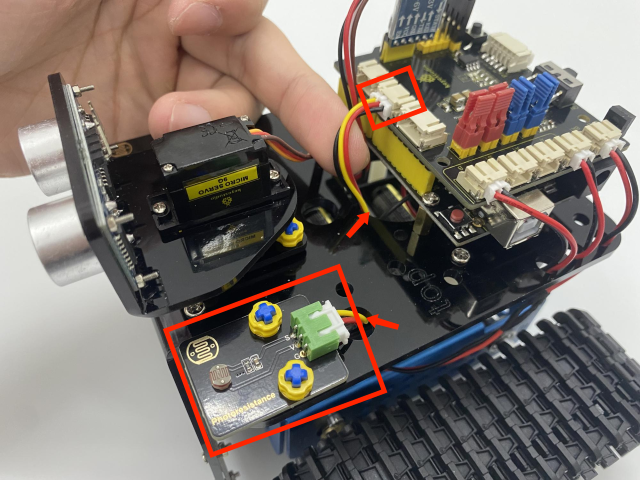
Photorésistance |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
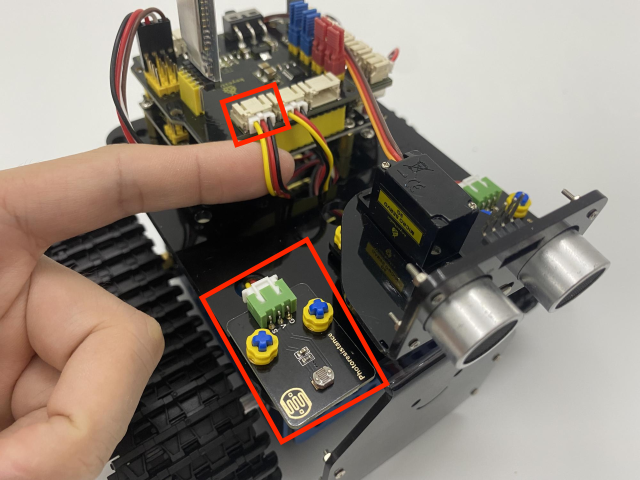
Photorésistance |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
Câblage du capteur ultrasonique.

Capteur Ultrasonique |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
Câblage du servo (D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Marron |
G |
Rouge |
V(5V) |
Orange |
D10 |
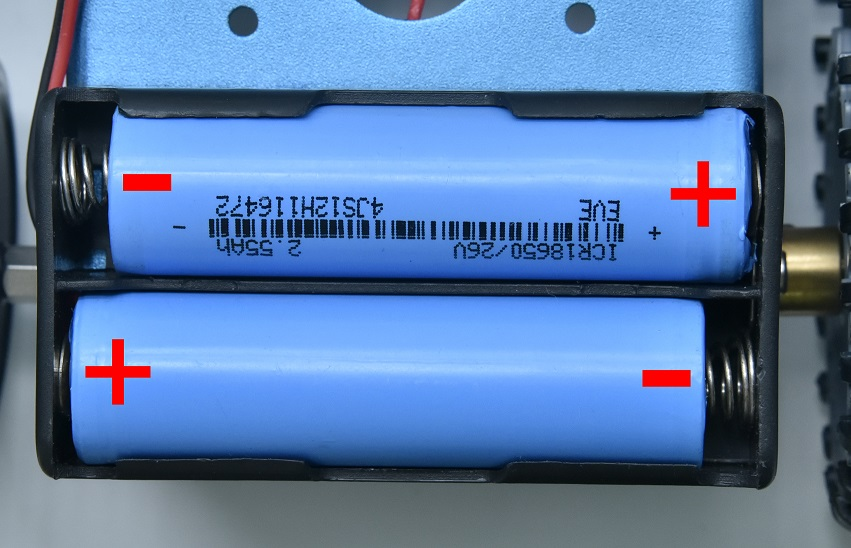
Nous utilisons une batterie lithium 18650 avec un pôle positif pointu, dont la puissance et la capacité ne sont pas imposées.