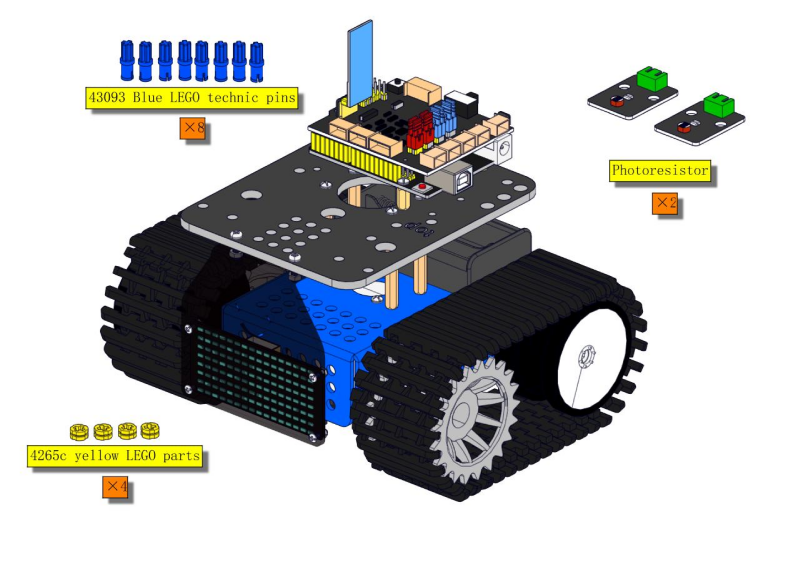
2. Productinstallatie
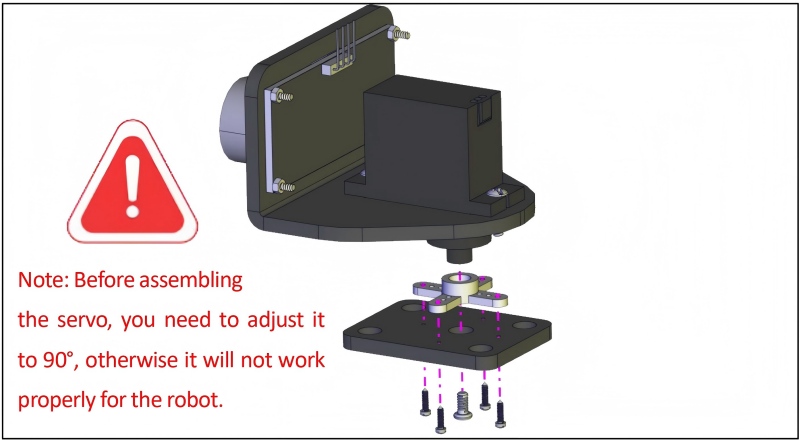
Waarschuwing: Stel de beginhoek van de servo in en verwijder dunne folies van de platen voordat u deze robot installeert.

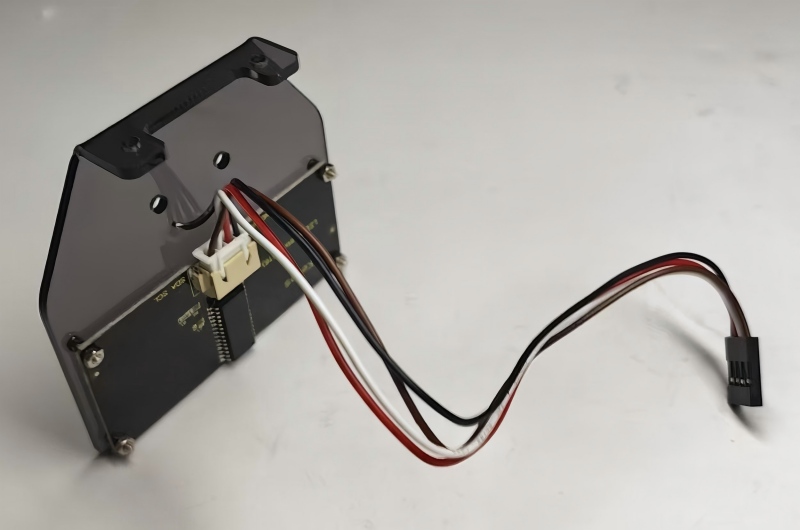
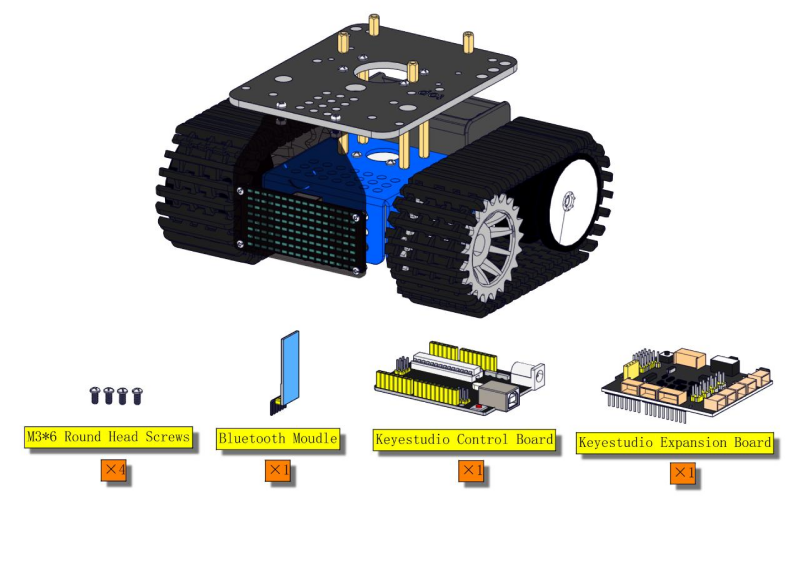
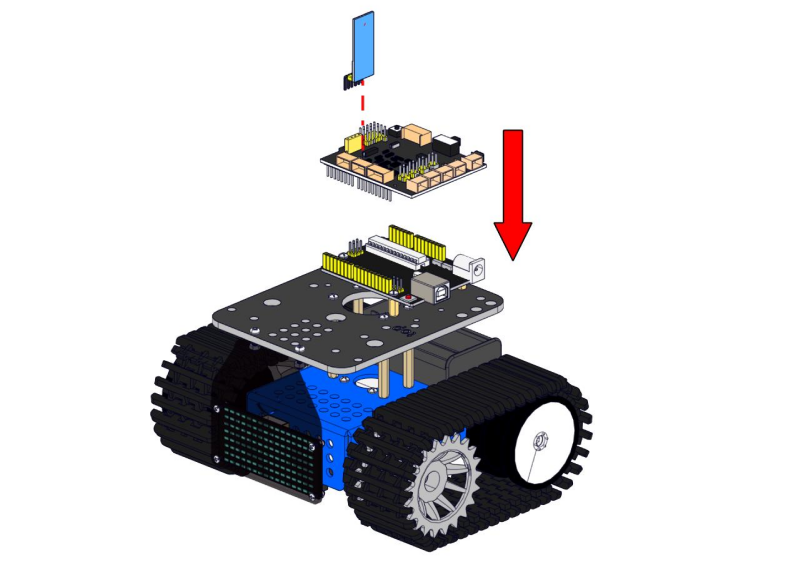
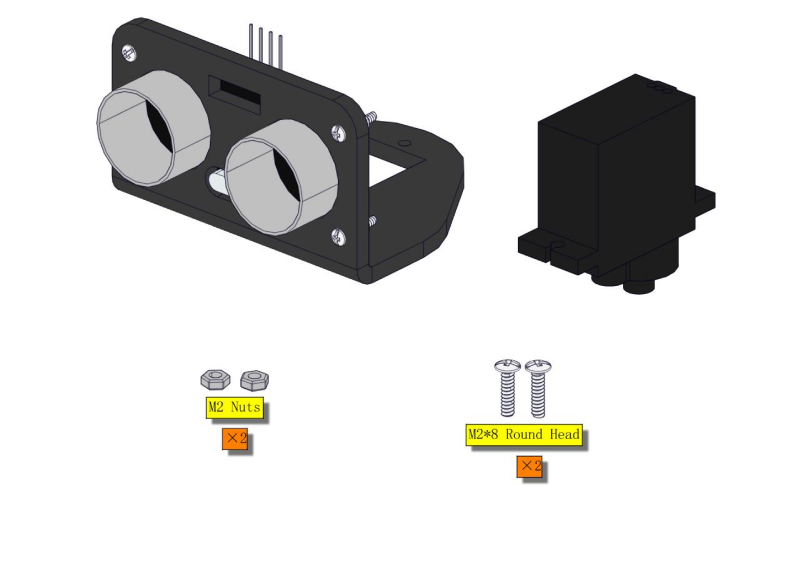
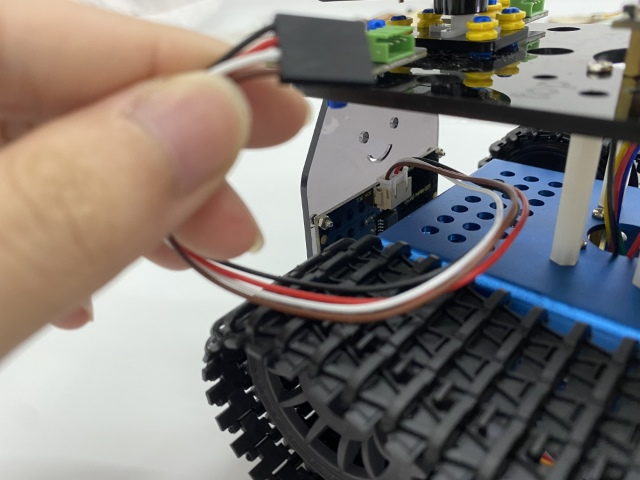
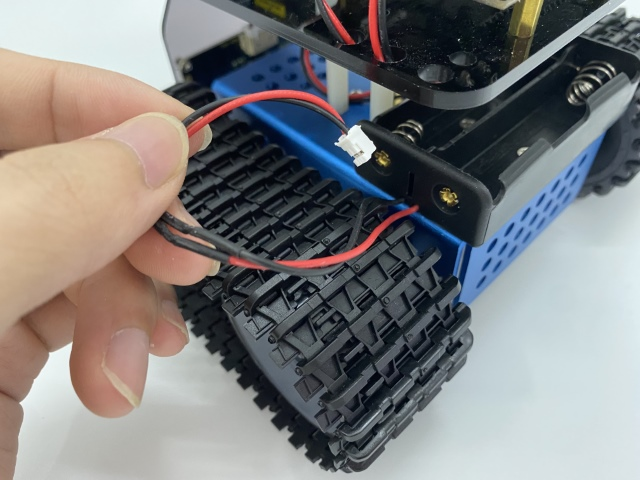
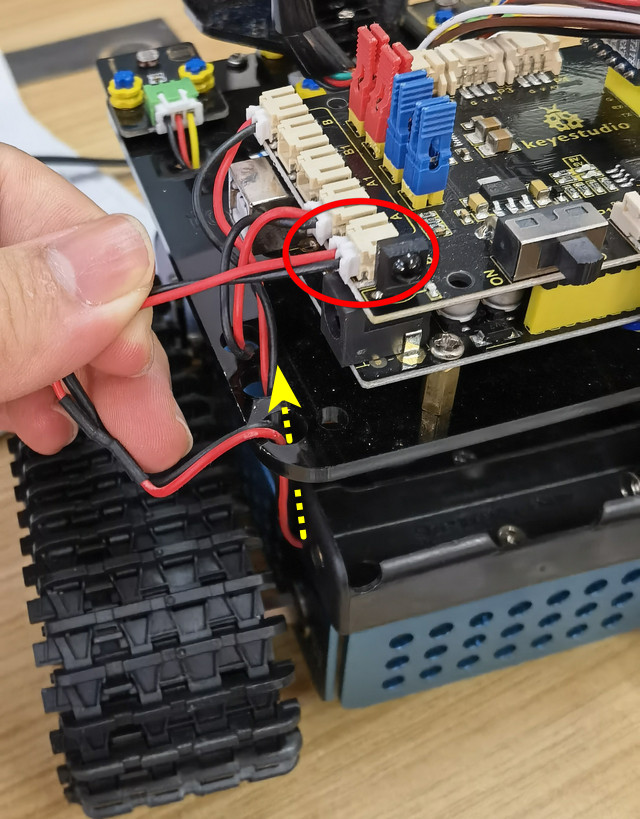
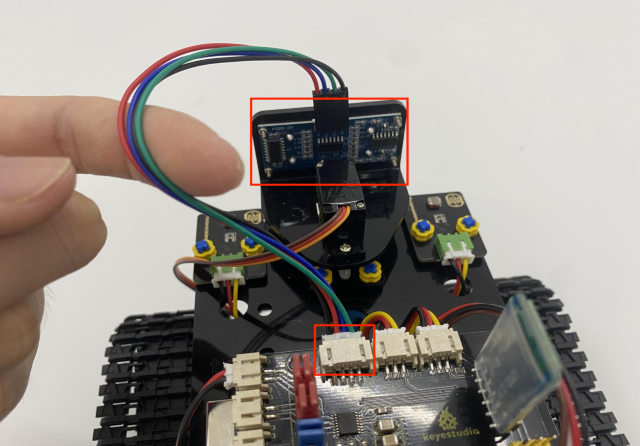
Stap 1

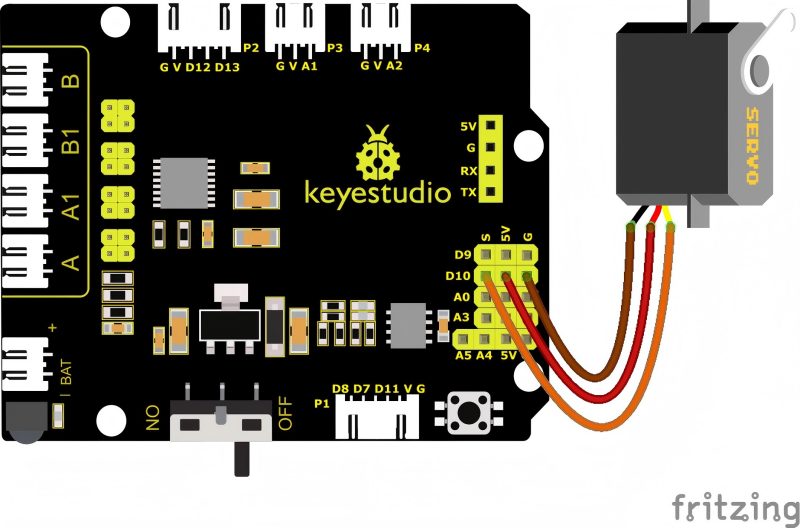
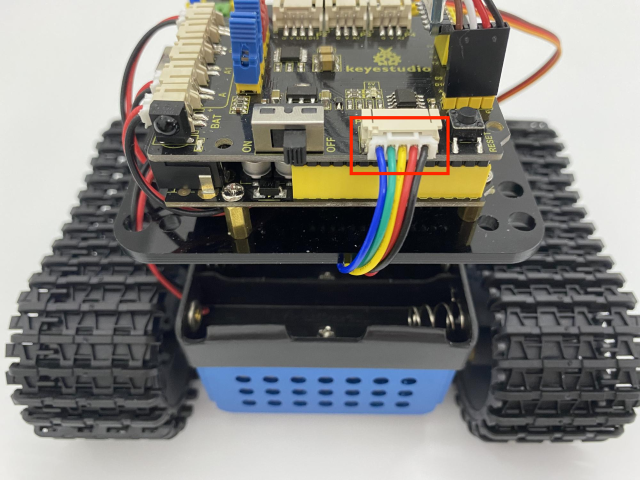
Sluit eerst de bedrading aan.
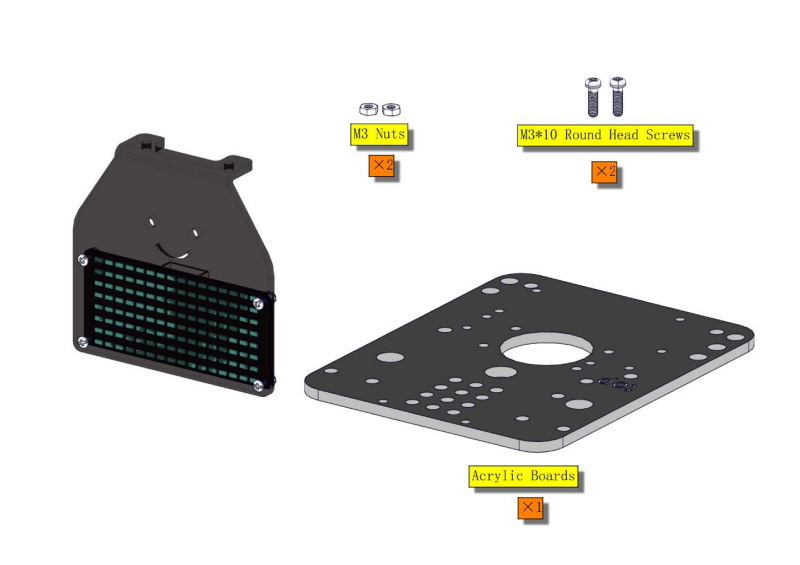
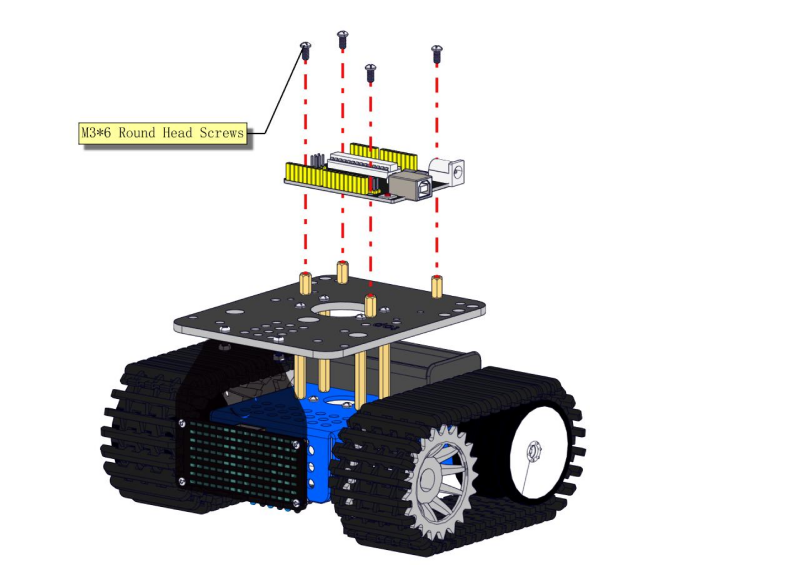
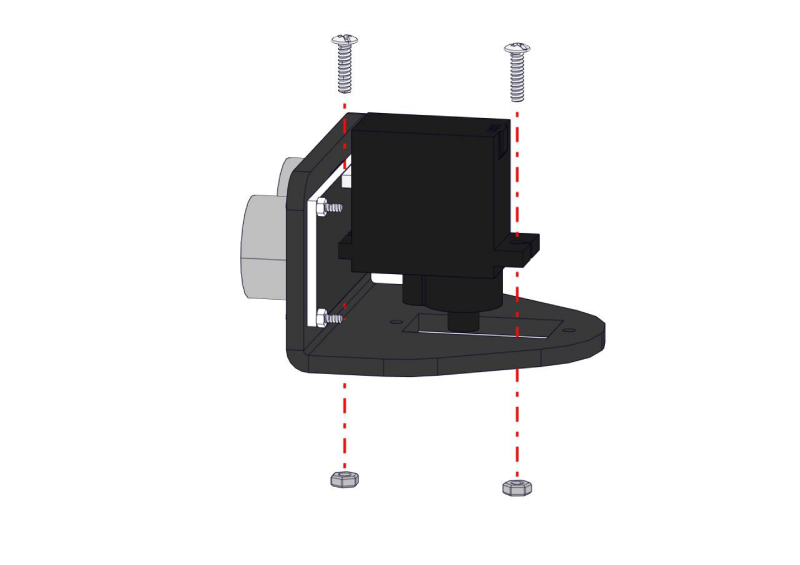
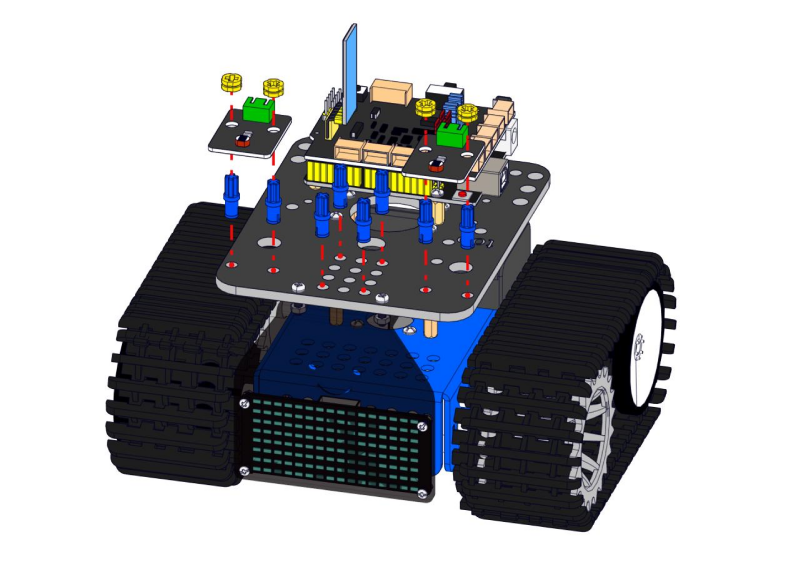
Stap 2
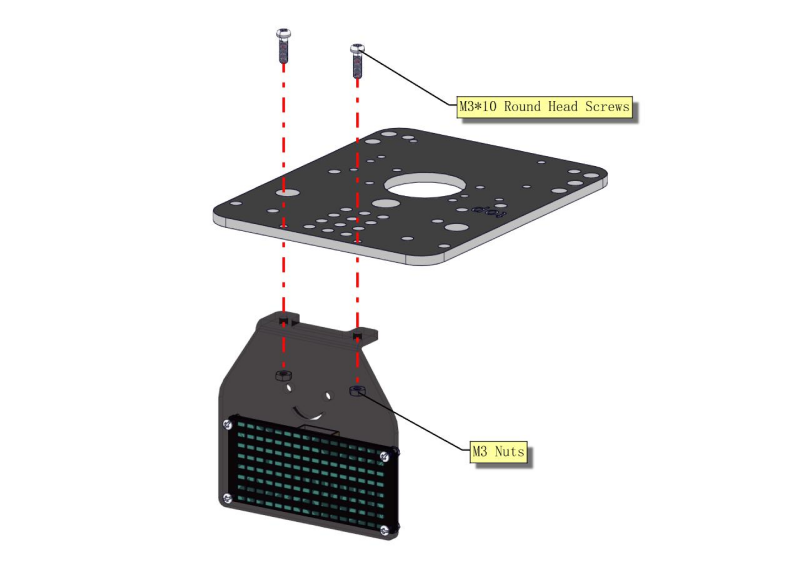
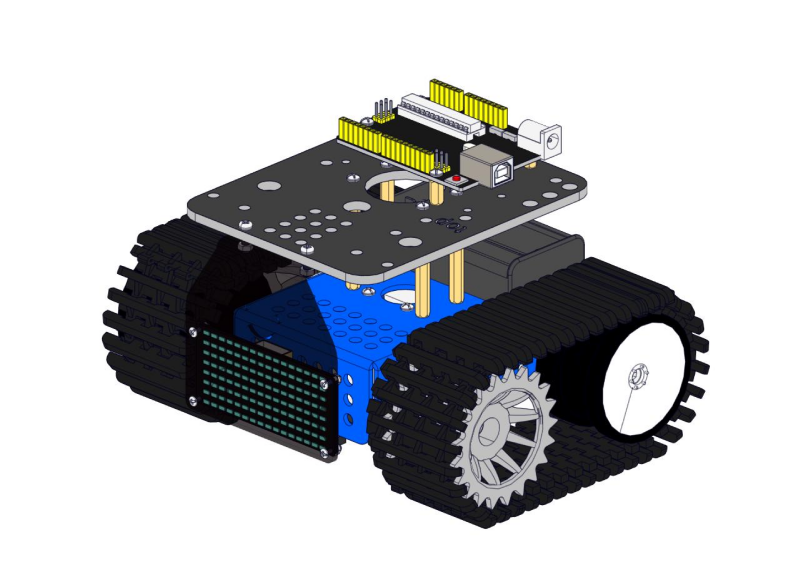
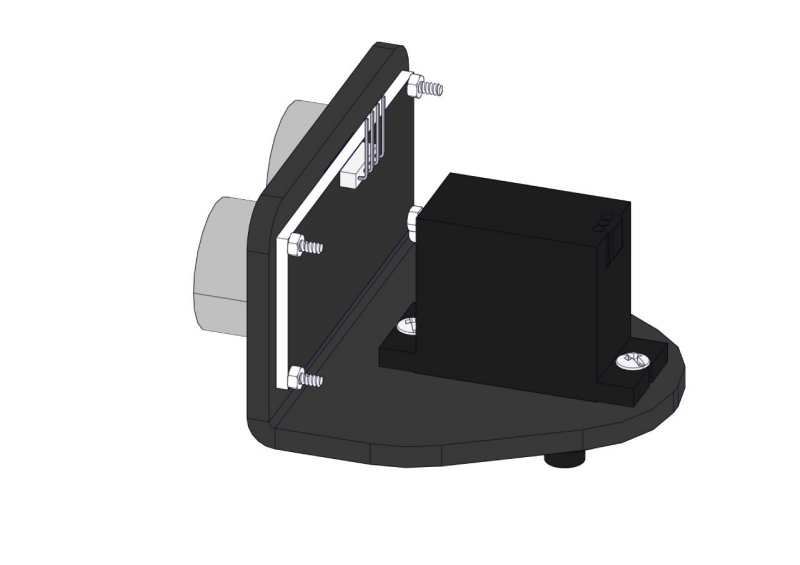
Stap 3

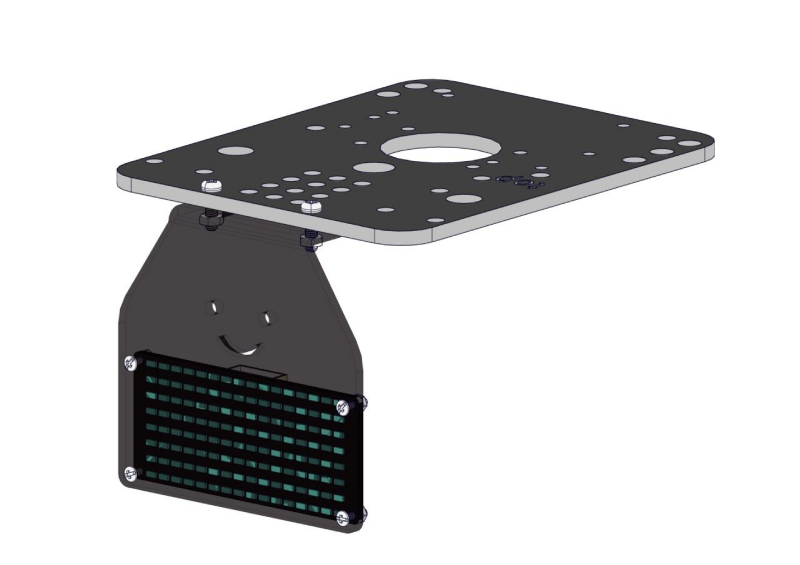
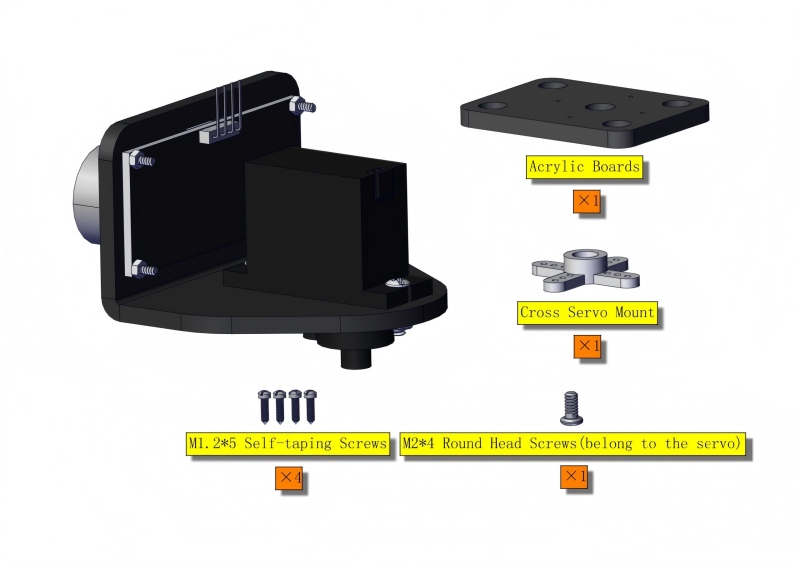
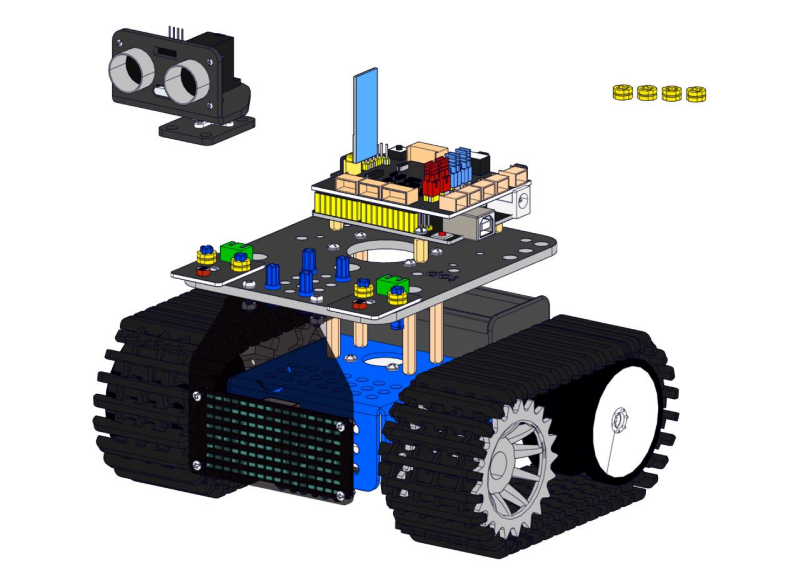
Stap 4
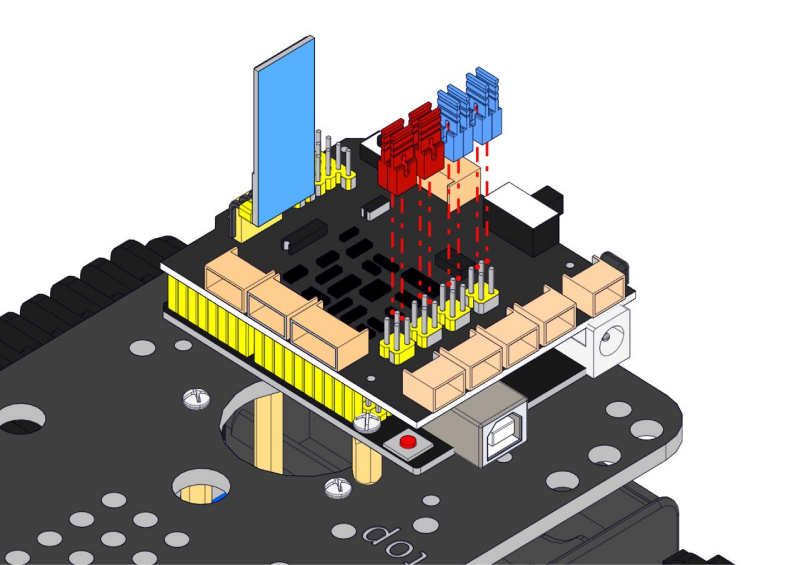
Stap 5
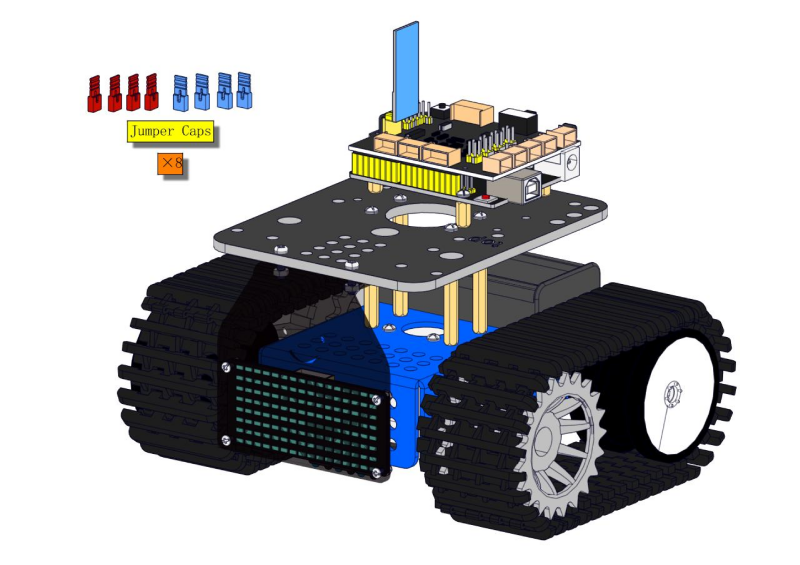
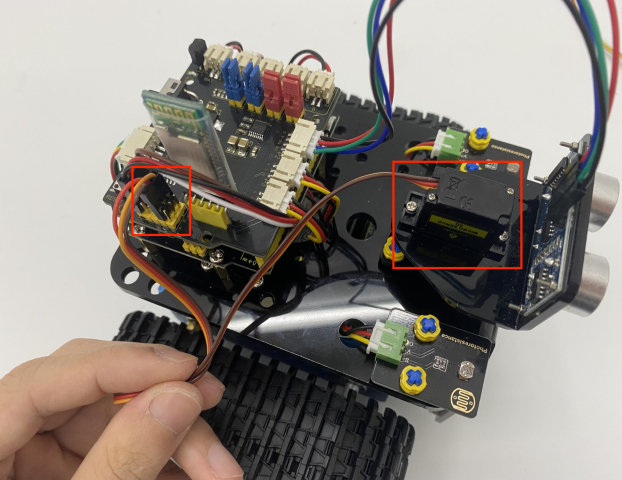
Let op de richting van de jumperkappen.
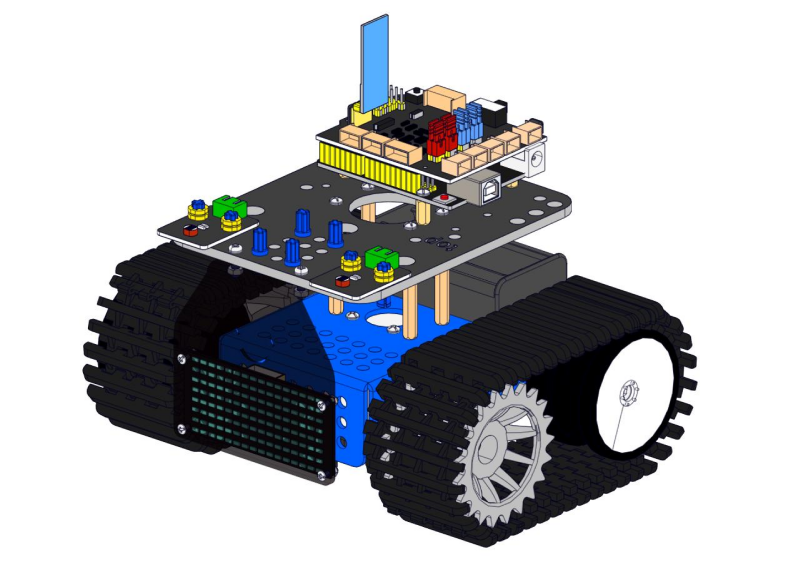
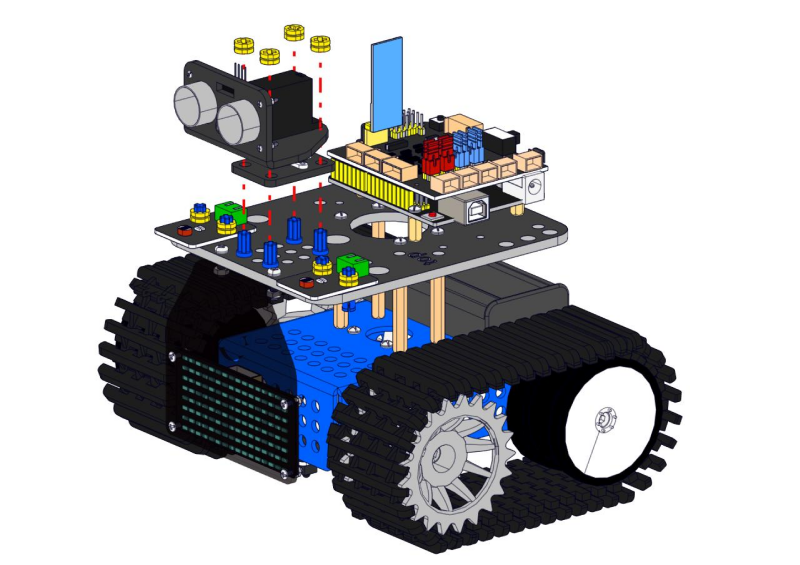
Stap 6
Stap 7
Stap 8
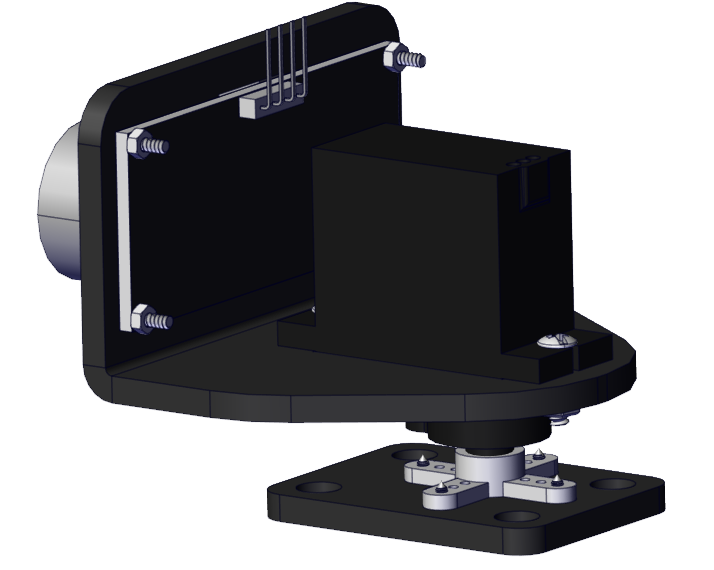
(De hoek van de servo moet worden afgesteld)
Stel de hoek van de servo in op 90°
Om de code van de servo aan te passen, selecteer deze op basis van de cursus.
1.Arduino: Download het codebestand: Arduino
2.Kidsblock: Download het codebestand: Kidsblock
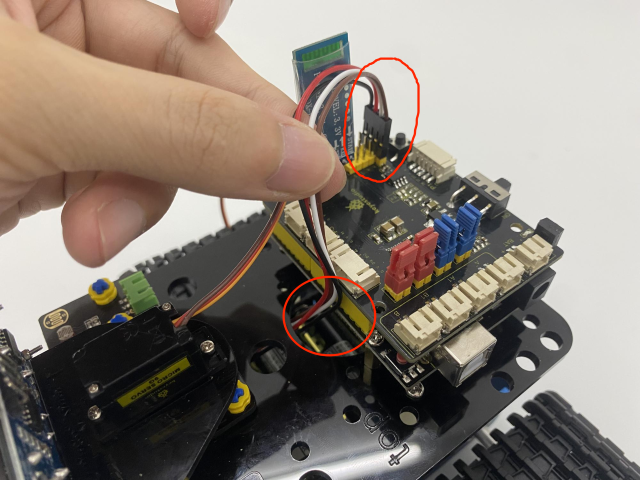
Nadat de servo-hoek is geïnitialiseerd, installeert u de Bluetooth-module.
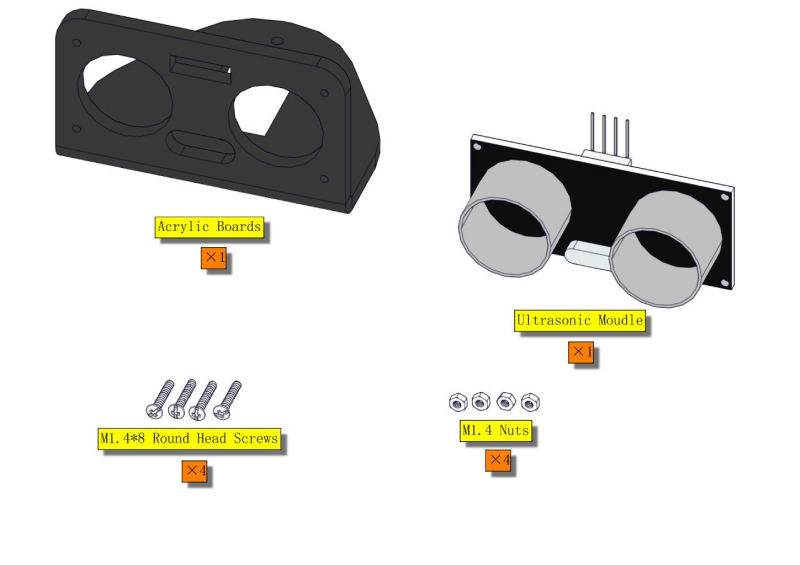
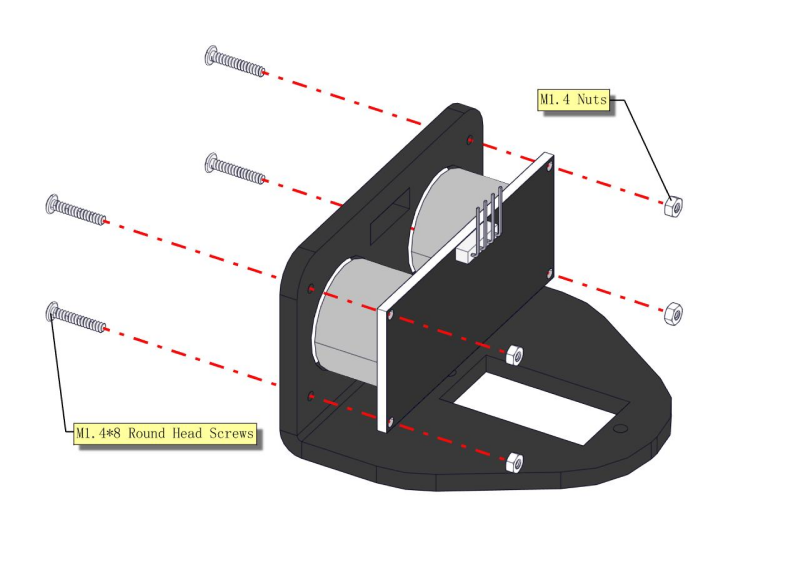
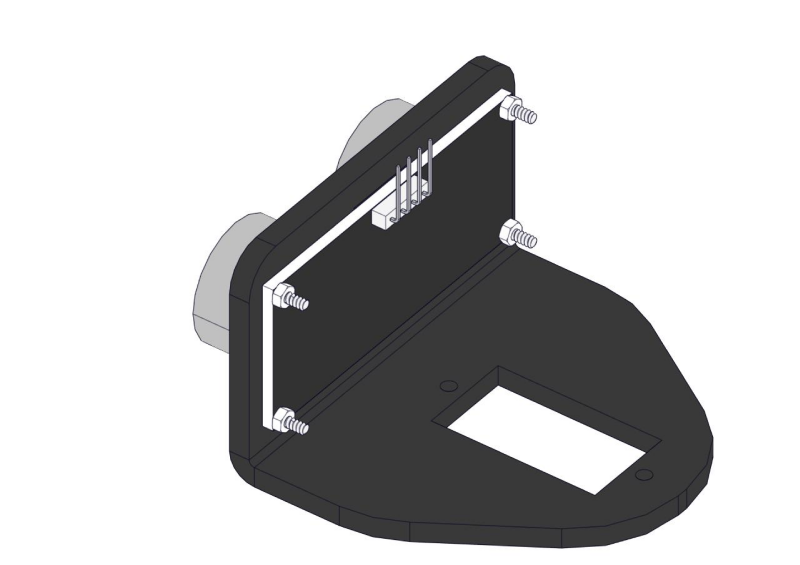
Houd de ultrasone sensor parallel aan de plaat.
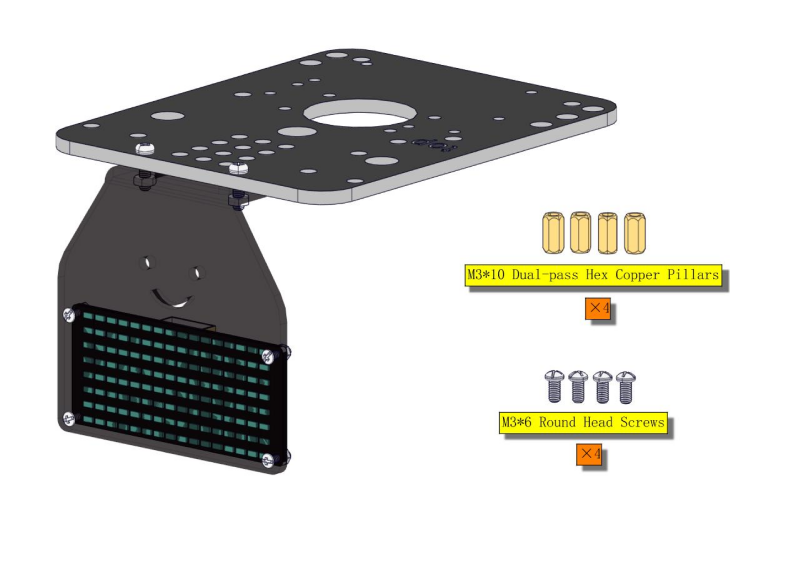
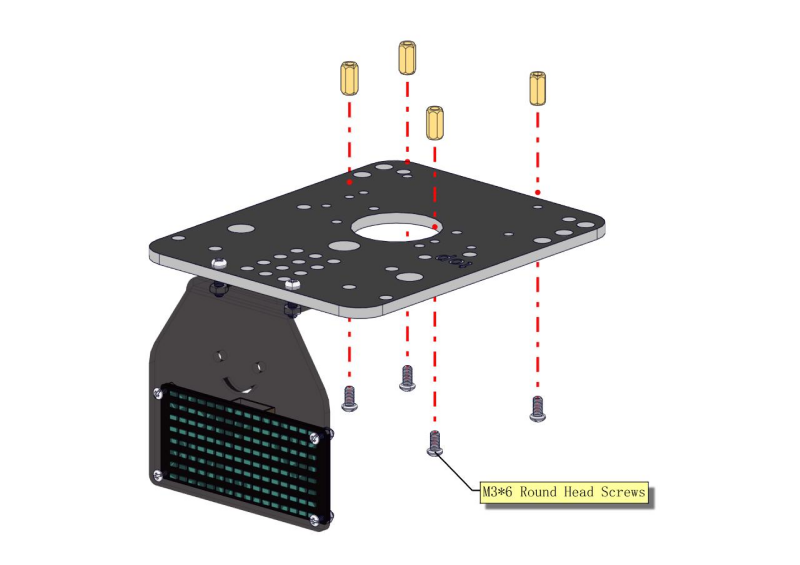
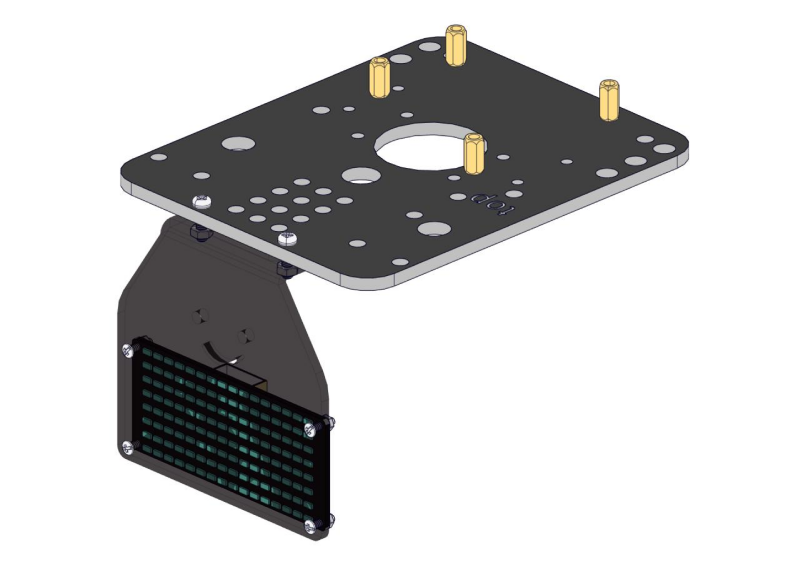
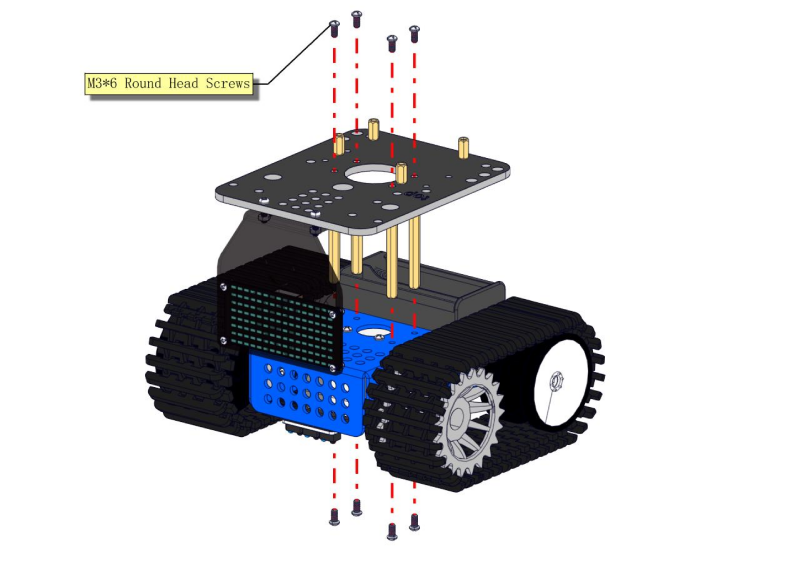
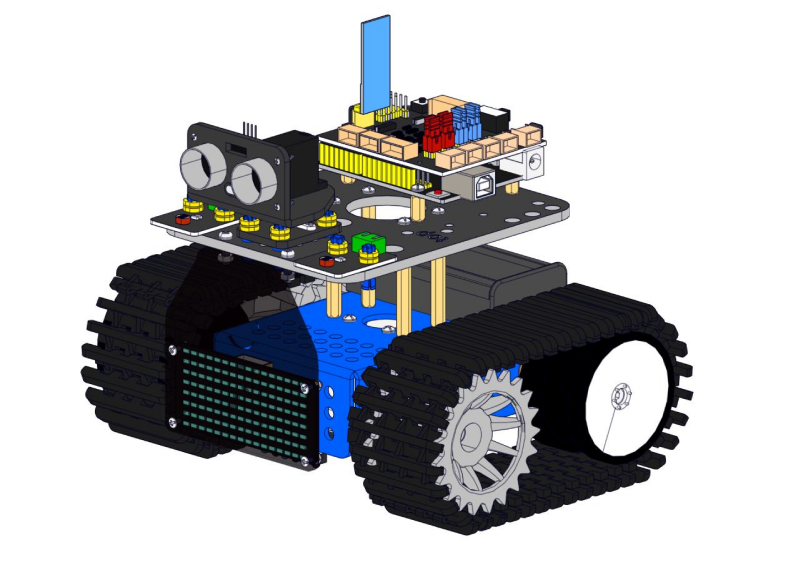
Stap 9
Stap 10
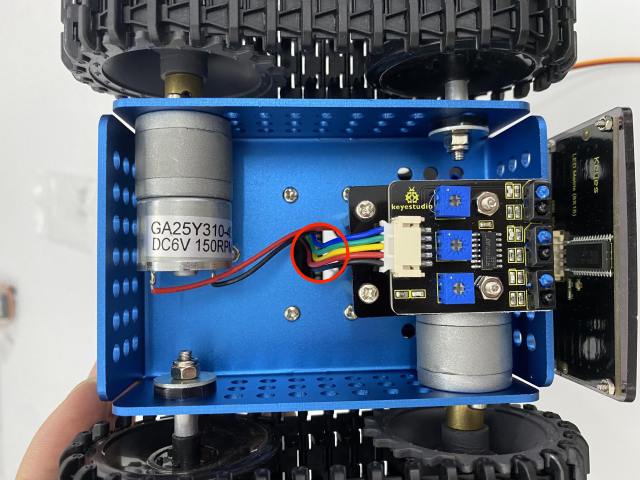
Bedrading aansluiten
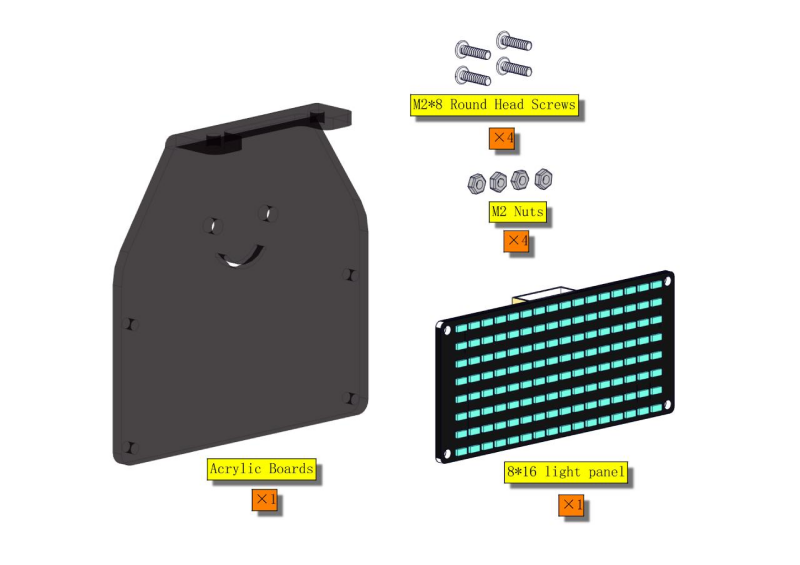
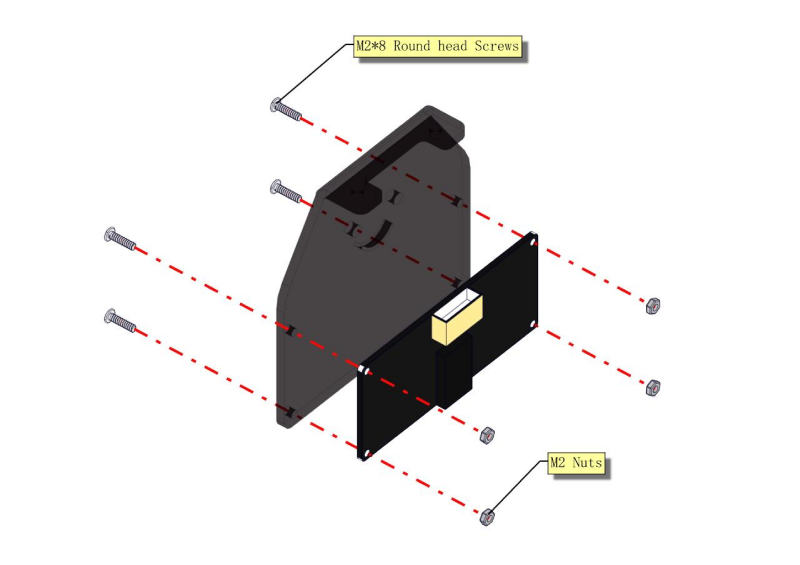
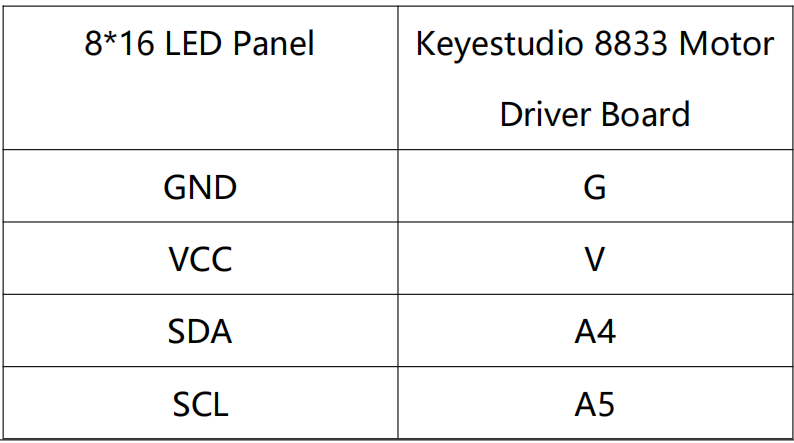
Voor het 8*16 LED-paneel, sluit de draden aan op A4 en A5.
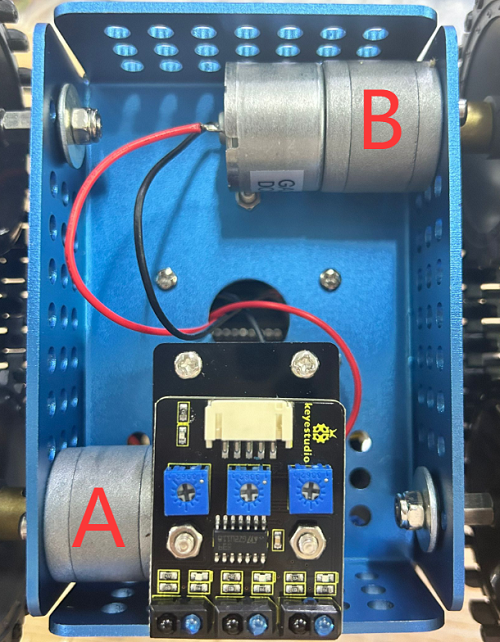
Sluit motor A aan op poort A en motor B op poort B.
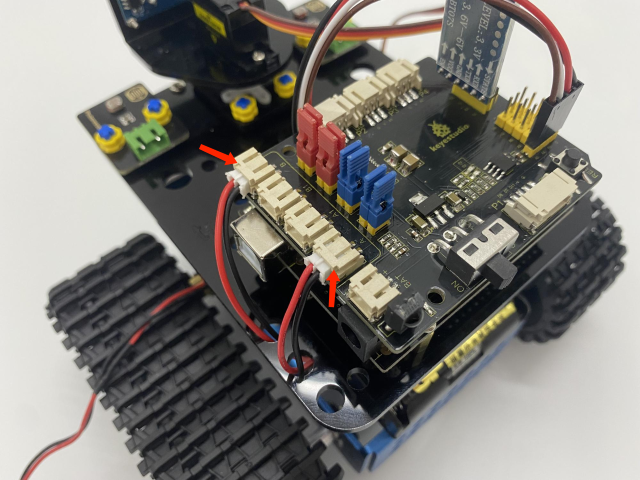
Sluit de voedingskabel aan.
Lijnvolgsensor (zie de afbeelding)

Sluit de fotoweerstand aan
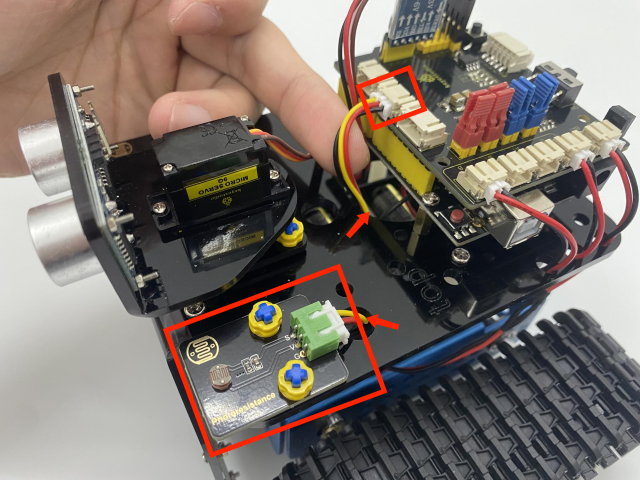
Fotoweerstand |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
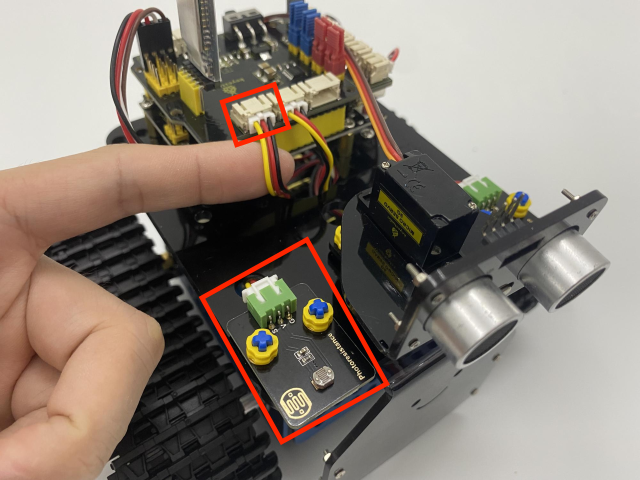
Fotoweerstand |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
Sluit de ultrasone sensor aan.

Ultrasone Sensor |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
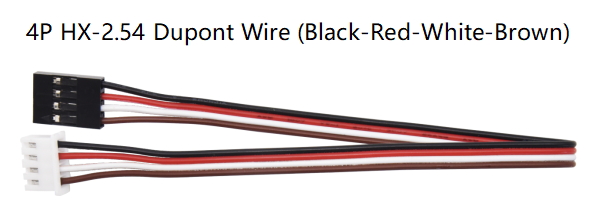
Sluit de servo aan (D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Bruin |
G |
Rood |
V(5V) |
Oranje |
D10 |
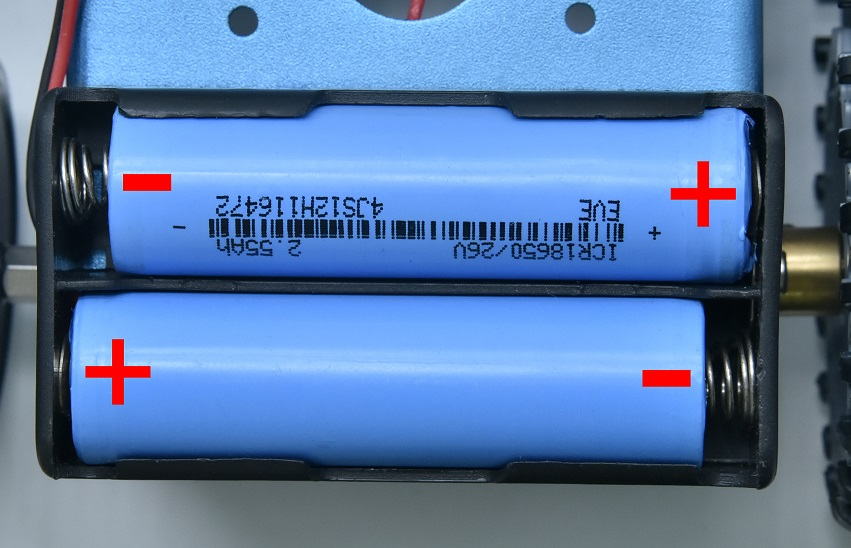
Wij gebruiken een 18650 lithiumbatterij met een puntige positieve pool, waarbij het vermogen en de capaciteit niet vereist zijn.