Makecodeチュートリアル
コードファイルのダウンロード
注:すべてのコースコードはここからダウンロードできます。ダウンロードリンクは後で提供されません。忘れないように、今後のチュートリアル学習のために今すぐコードをダウンロードすることをお勧めします。
1. micro:bitを始める
1.1 はじめに
micro:bitは、センサーと出力が内蔵されたポケットサイズのコンピューターです。ロボットから楽器まで、現実世界と相互作用する物理コンピューティングプロジェクトを作成するために使用できます。
1.2 micro:bitについて
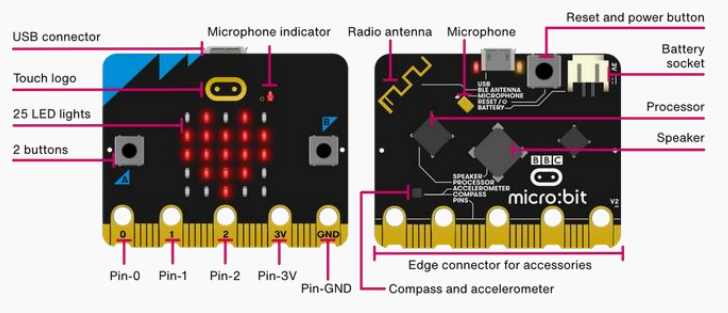
新しいmicro:bit (V2)
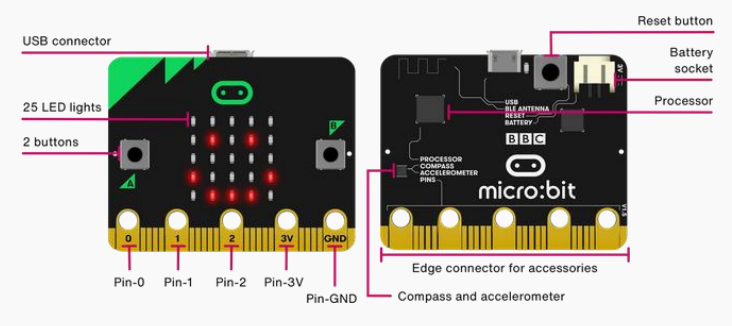
オリジナルのmicro:bit (V1)
以下の内容は、Kitronik Universityのmicro:bitリソースとガイドから引用しています。
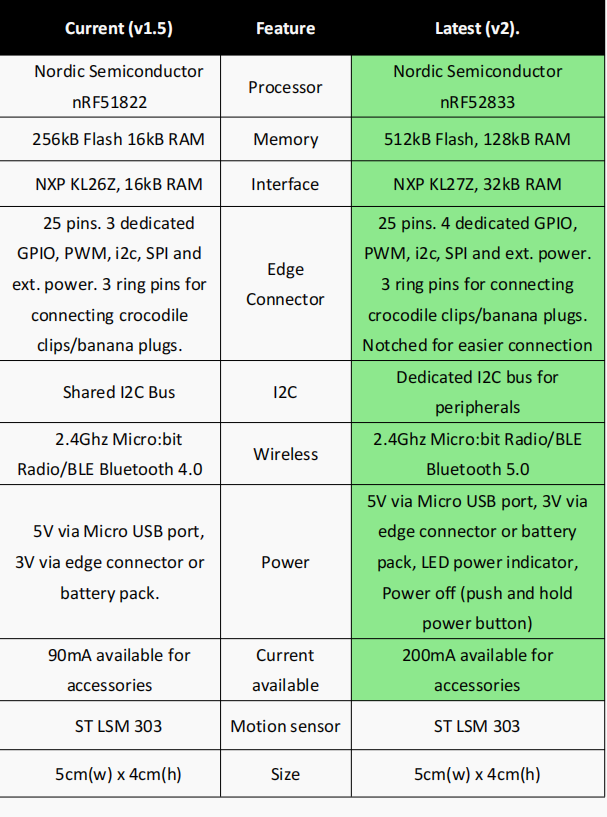
以下の表は、両方のボードのすべての機能を比較しやすくするためにリストしています。新規または改善された機能は緑色で強調表示されています。
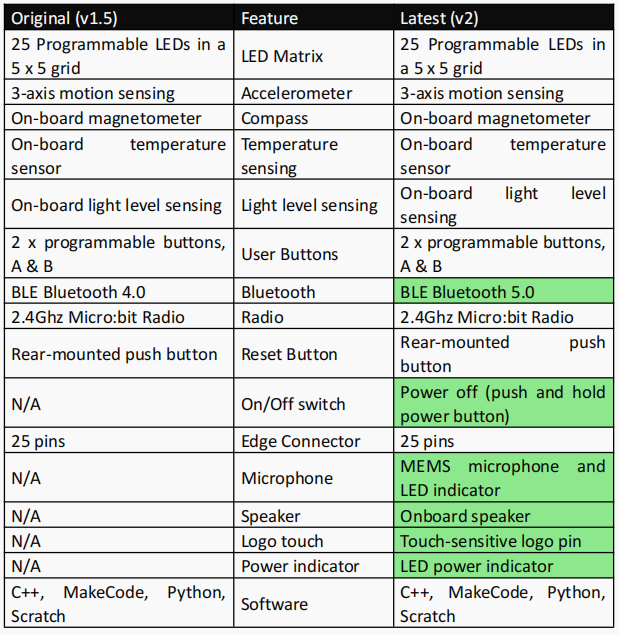
V2ボードには、いくつかの使いやすさの強化も施されています。それらは次のとおりです。
**ノッチ付きエッジコネクタ。**ワニ口クリップや導電性糸などを接続しやすくするため。
**電源LEDインジケータ。**USBアクティビティインジケータに加えて。
**金メッキアンテナ。**無線およびBluetoothコンポーネントを簡単に識別するため。
新しいmicro:bitスピーカーは、現在スピーカーをmicro:bitに接続している場合と同じように機能し、サウンド出力はスピーカーとエッジコネクタの両方から行われます。MakeCodeエディタの新しいマイクブロックを使用すると、サウンドに反応するコードを記述できます。
micro:bit V1とmicro:bit V2の技術仕様:
オンボード技術の多くも強化されています。プロセッサとメモリがアップグレードされ、他のオンボード技術もアップグレードできるようになりました。
以下の表は、両方のボードの主要な技術仕様を比較しやすくするためにリストしています。新規または改善された機能は緑色で強調表示されています。
1.3 コードのアップロード
MakeCodeエディタを実行するためのブラウザ:https://makecode.micro:bit.org/
micro:bitへのコード転送
micro:bitへのコード転送 上記のアニメーションGIFで示されているWebUSB方式に加えて、コードをダウンロードしてmicro:bitのドライブレターに直接コピーすることもできます。この方法は、ブラウザ関連の問題によりWebUSBダウンロードが失敗する可能性があるため、より信頼性が高いことがよくあります。もちろん、WebUSBはより大きな利便性を提供します。コード転送中にいずれかの方法が失敗した場合は、別の方法を試してください。
WebUSBダウンロード方法を使用しても、コードはローカルコンピューターに保存されません。作成したプログラムのコピーを保持したい場合は、保存アイコン(MakeCodeエディターのプロジェクト名の横にあるフロッピーディスクのようなアイコン)をクリックして、hexファイルのコピーをローカルマシンに保存してください。
.hexファイルを転送すると、micro:bitがリセットされるため、micro:bitドライブは切断され、再接続されます。micro:bitドライブの内容を見ると、.hexファイルはリストされていませんが、これは正常であり、hexファイルは実行されます。
Safari/Firefox/その他を使用する
**注:**前述したように、WebUSB経由のダウンロードはブラウザの問題により失敗する可能性があるため、ChromeまたはEdge以外のブラウザを使用している場合。WebUSBをサポートしていない可能性があり、micro:bitをコンピューターとペアリングできない場合があります。 'ダウンロード’ボタンをクリックするたびに、プログラムはmicro:bitに直接転送されず、コードは.hexファイルとしてダウンロードされます。保存アイコンをクリックしてhexファイルのコピーをコンピューターに保存するのと同じです。このファイルをコンピューターのファイルエクスプローラーを使用してmicro:bitにドラッグできます。
MakeCodeエディタの紹介
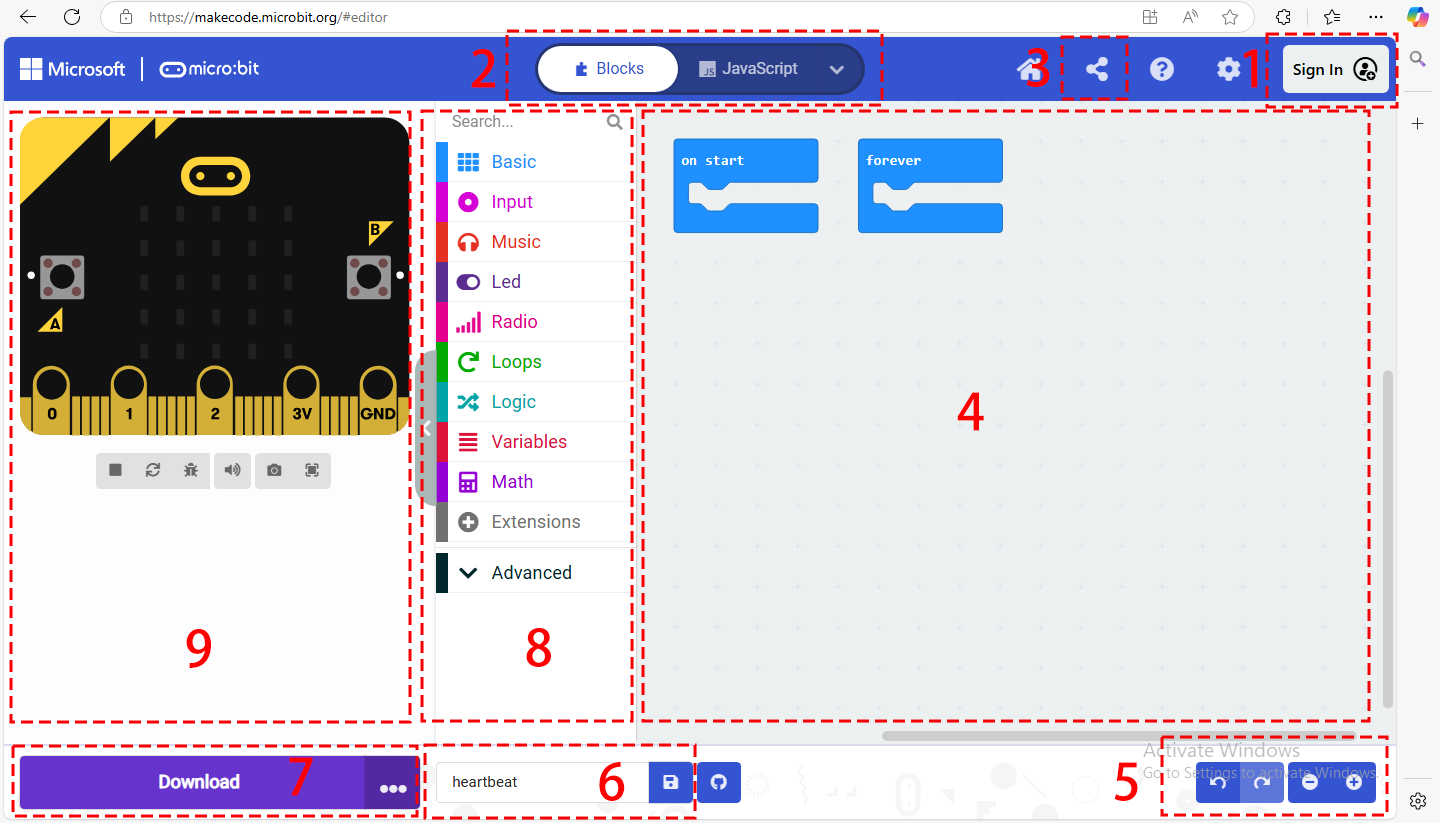
これでMakeCodeエディタが表示されます。これはmicro:bitをプログラミングするために使用する画面です。
以下は、インターフェースをよりよく理解できるように、エディタのさまざまな部分を簡単に説明したものです。
# |
説明 |
|---|---|
1 |
サインイン — サインインして進捗状況を保存し、いつでもどこでも作業にアクセスできます |
2 |
ブロック/JavaScript/Python — ブロック(デフォルト)またはJavaScriptでプログラミングして、自分の冒険を選択します。画像には表示されていませんが、Microsoftは最終的にコードをMicroPythonに変換する追加オプションも追加しました。 |
3 |
共有 — さまざまな方法でプロジェクトコードを友達と共有できます! |
4 |
プログラムスペース — ここで魔法が起こり、プログラムを構築します…「コードを作成」します。 |
5 |
ズーム/元に戻す-やり直し — 時には元に戻したり、ズームアウトして周りを見回したりする必要があります。これらはそのためのボタンです。 |
6 |
名前と保存 — プログラムに名前を付けて、.hexファイルとしてコンピューターに保存(ダウンロード)します。このファイルをコンピューターのファイルエクスプローラーを使用してmicro:bitにドラッグできます。 |
7 |
ダウンロード — WebUSBを使用してコードをmicro:bitに直接転送します。または、保存と同様に、プログラムを.hexファイルとしてダウンロードし、micro:bitにドラッグします。 |
8 |
ブロックライブラリ — ツールボックスは、プログラムを構成するブロックを取得する場所です。色分けされたカテゴリに分かれています。 |
9 |
シミュレーター — ハードウェアは必要ありません!MakeCodeにはリアルタイムシミュレーターがあります!プログラムを変更すると、この仮想micro:bitで何をするかを確認できます! |
2. Micro:bitプロジェクト
パート2:Micro:bitプロジェクトでは、Micro:bitメインボードの使用のみを扱います。車の使用はパート3:ロボットプロジェクトで扱います。
2.6.1 LEDマトリックス
前面には25個のLEDがあり、写真、数字、文字を表示するために使用できます。
1 このステップでは、micro:bitにコードをダウンロードして、座標(1,0)と座標(3,4)のLEDを点灯させます。
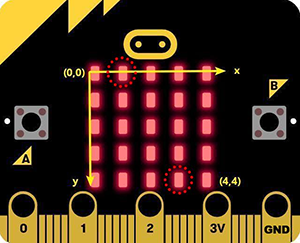
左上隅が(0,0)点、右下隅が(4,4)点、水平方向(左から右)がx軸方向で、順に[0-4]に増加し、垂直方向(上から下)がy軸方向で、順に[0-4]に増加します。
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
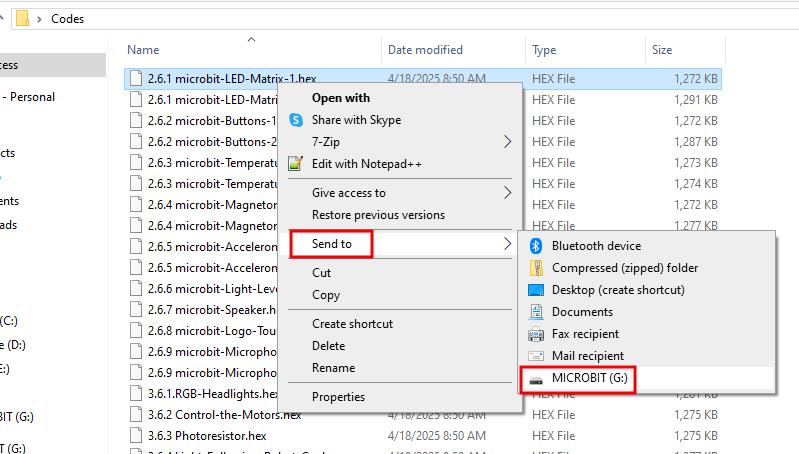
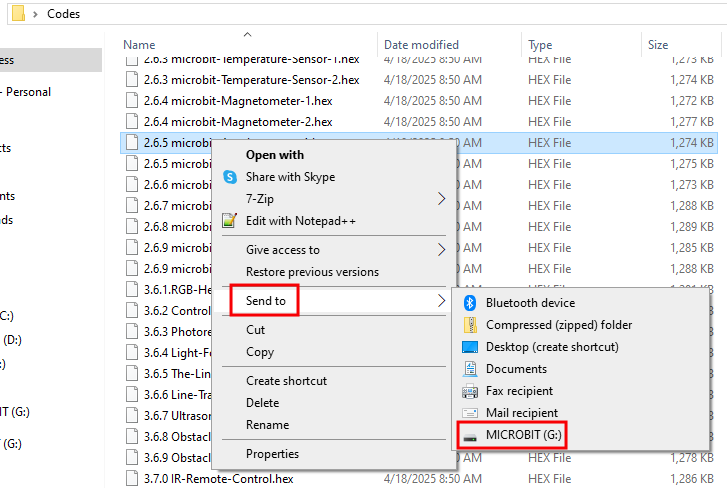
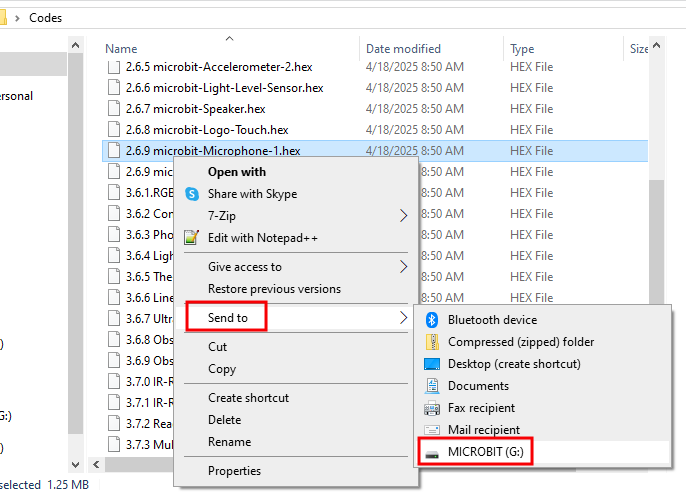
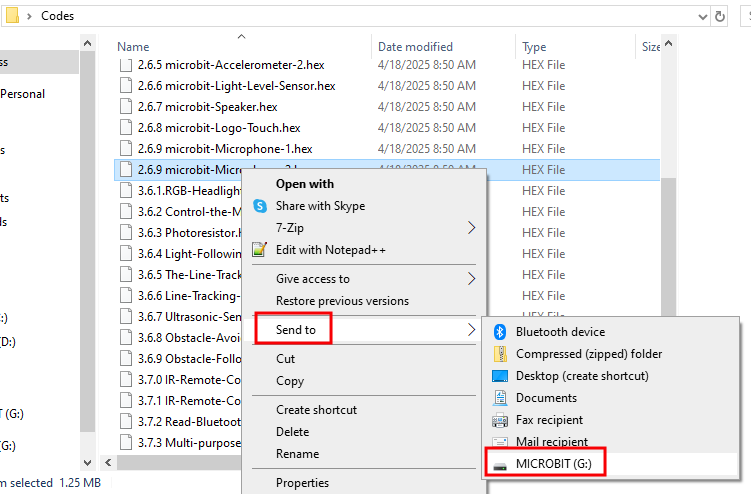
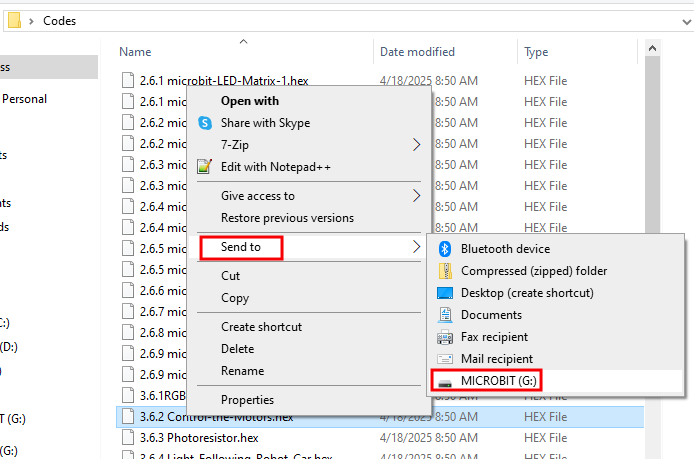
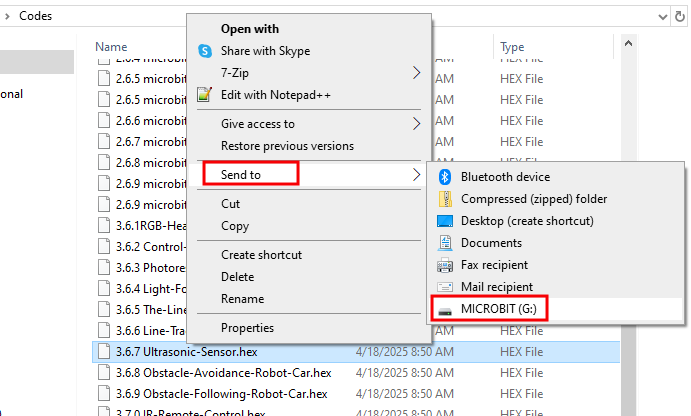
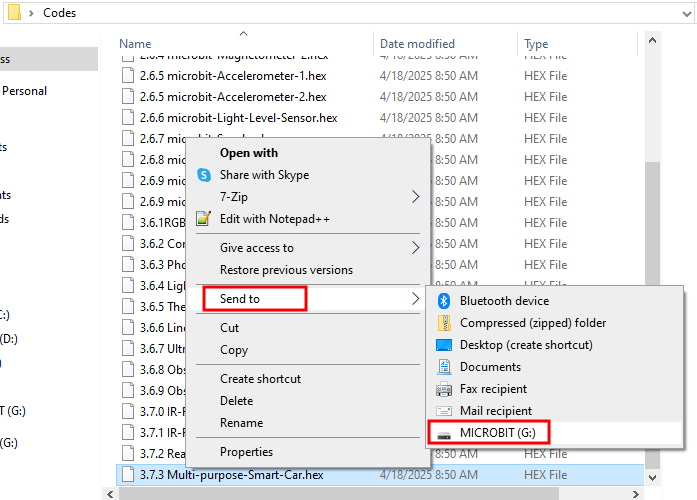
ダウンロードしたmicro:bit-LED-Matrix-1.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitに書き込みます。
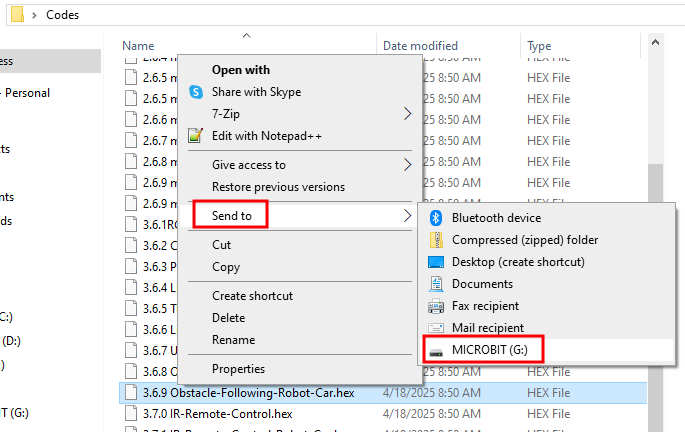
-または、右クリックして「送る→micro:bit」を選択することもできます。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.1micro:bit-LED-Matrix-1 |
結果:micro:bitの座標(1,0)と座標(3,4)のLEDが交互に点滅します。
2 次に、micro:bitを使用して数字の1、2、3、4、5を表示し、その後、以下のパターンを以下の順序で循環させます。 、「Hello!」、
、「Hello!」、 、
、 、
Download: ダウンロードボタンは、コードが書き込んだデータを収集し、data-11-2018-23-00-0700.csvのような名前のファイルとしてコンピュータにダウンロードします。ファイル名に含まれる数字は、ファイルが作成された日付と時刻です。csvファイルに関連付けられているプログラムがある場合、ファイルは自動的にエディタまたはスプレッドシートで開かれることがあります。

2 次に、micro:bitに別のコードを送信して、micro:bitのLEDマトリックスに温度センサーで検出された温度を表示させましょう。
手順:
USBケーブルでmicro:bitをコンピュータに接続します。
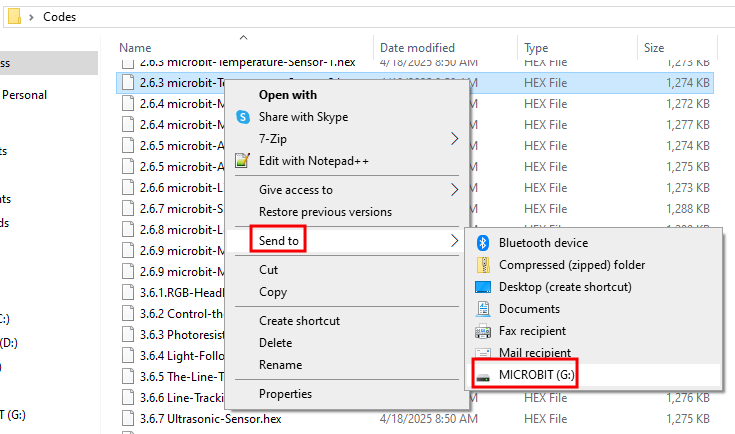
ダウンロードしたmicro:bit-Temperature-Sensor-2.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitにフラッシュします。
または、ファイルを右クリックして「送る→micro:bit」を選択することもできます。
ファイルの種類 |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.3 microbit-Temperature-Sensor-2 |
結果:micro:bitの電源がオンになると、摂氏の温度表示がLEDアレイをスクロールして表示され、続いて華氏の温度表示がスクロールして表示されます。
2.6.4 磁力計
micro:bitの内蔵磁力計チップは、磁北を検出するコンパスとして使用することを目的としています。スマートフォンのコンパスアプリと同様に、これにはキャリブレーションが必要です。
1 まず、micro:bitのコンパスをキャリブレーションする必要があります。次に、LEDマトリックスにコンパスで読み取った方向値を表示させます。北、東、南、西はそれぞれ0°、90°、180°、270°に対応します。
手順:
USBケーブルでmicro:bitをコンピュータに接続します。
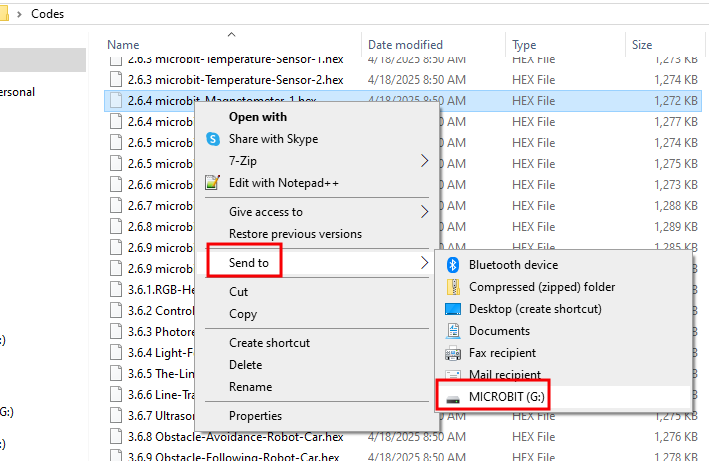
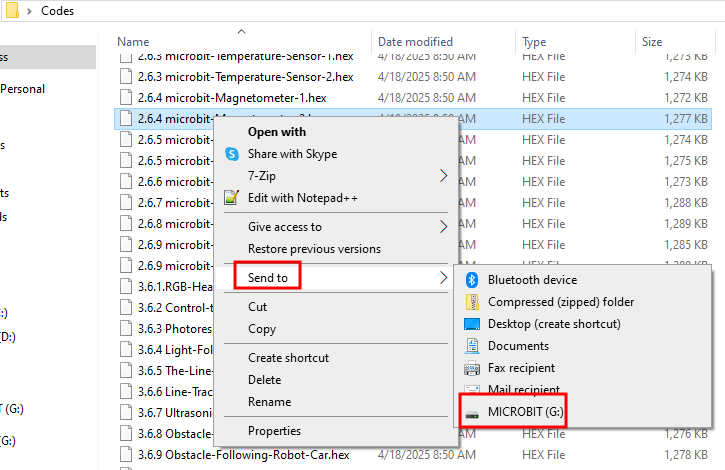
ダウンロードしたmicro:bit-Magnetometer-1.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitにフラッシュします。
または、ファイルを右クリックして「送る→micro:bit」を選択することもできます。
ファイルの種類 |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.4 microbit-Magnetometer-1 |
コードがmicro:bitにダウンロードされると、micro:bitのLEDマトリックスに「TILT TO FILL SCREEN」と表示され、その後キャリブレーションモードに入ります。
キャリブレーション方法:
micro:bitを特定の方向に傾けると、LEDマトリックスはその方向により多くのLEDを点灯させます。すべてのLEDが点灯し、笑顔が表示されてキャリブレーションが完了するまで、micro:bitをあらゆる方向に傾け続けます!
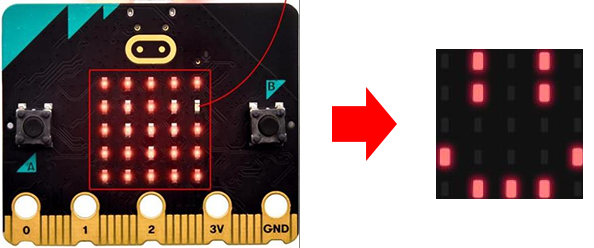
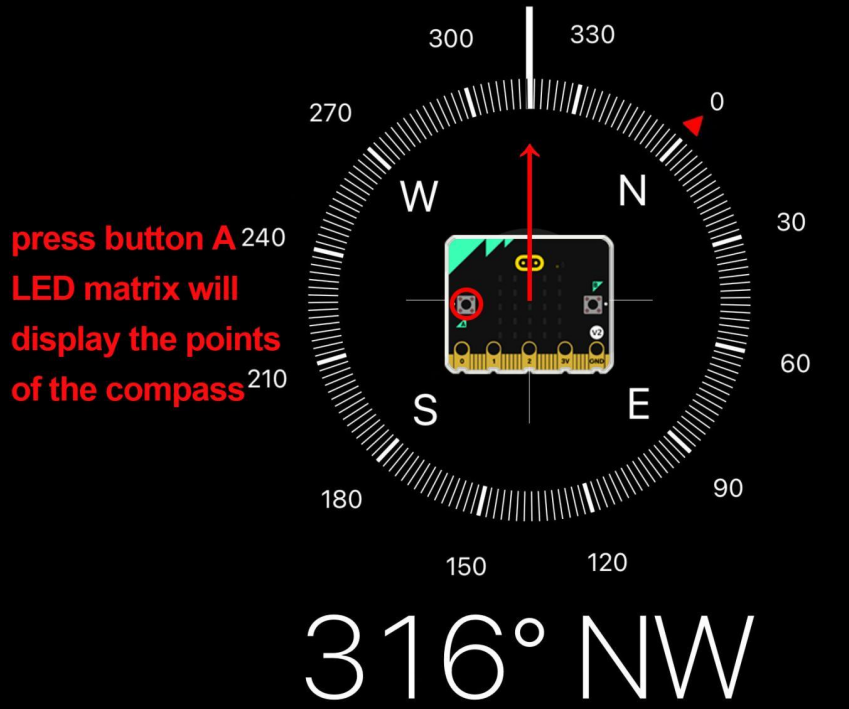
テスト結果: ボタンAを押すたびに、コンパスで読み取った位置の値がLEDマトリックスに表示されます。micro:bitの向きを変えると、位置の値もそれに応じて変化することに気づくでしょう。
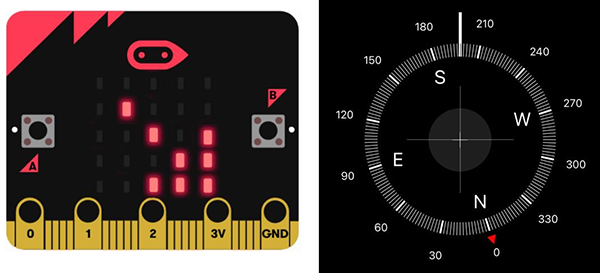
2 ここでは、LEDマトリックスの矢印が常に北を指すように、新しいコードをダウンロードします。
手順:
USBケーブルでmicro:bitをコンピュータに接続します。
ダウンロードしたmicro:bit-Magnetometer-2.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitにフラッシュします。
または、ファイルを右クリックして「送る→micro:bit」を選択することもできます。
ファイルの種類 |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.4 microbit-Magnetometer-2 |
コードがmicro:bitにダウンロードされると、micro:bitのLEDマトリックスに「TILT TO FILL SCREEN」と表示され、その後キャリブレーションモードに入ります。
キャリブレーション方法:
micro:bitを特定の方向に傾けると、LEDマトリックスはその方向により多くのLEDを点灯させます。
すべてのLEDが点灯し、笑顔が表示されてキャリブレーションが完了するまで、micro:bitをあらゆる方向に傾け続けます!
テスト結果: micro:bitのLEDマトリックスを上向きに水平に置き、水平方向にその向きを変えると、どのように向きを変えても、LEDマトリックスに表示される矢印が同じ方向を指していることがわかります。スマートフォンのコンパスアプリがある場合は、コンパスアプリをオンにし、スマートフォンと同じ方向にmicro:bitを水平に持つと、micro:bitの矢印が北(0度)を指していることがわかります。
2.6.5 加速度センサー
加速度センサーは、動きを測定するモーションセンサーです。BBC micro:bitの加速度センサーは、左右、前後、上下に傾けたときにそれを検出します。
micro:bitが机の上に平らに置かれていると想像すると、x軸は左右、y軸は前後、z軸は机の奥と手前になります。重力は常に同じ下向きに作用するため、加速度センサーを使用してmicro:bitの向きを検出できます。
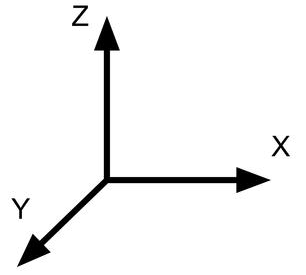
X: 左右方向の加速度。
Y: 前後方向の加速度。
Z: 上下方向の加速度。
Strength: 3つの次元(方向)すべてからの結果として生じる加速度の強さ。
加速度の量を意味する数値
micro:bitが画面を上にして平らな面に置かれている場合、
-xは0、
-yは0、
-zは-1023、
-そしてstrengthは1023です。
1 このステップでは、データビューウィンドウを使用して、加速度センサーで検出されたx、y、z軸の値を表示します。
手順:
USBケーブルでmicro:bitをコンピュータに接続します。
ダウンロードしたmicro:bit-Accelerometer-1.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitにフラッシュします。
ファイルの種類 |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.5 microbit-Accelerometer-1 |
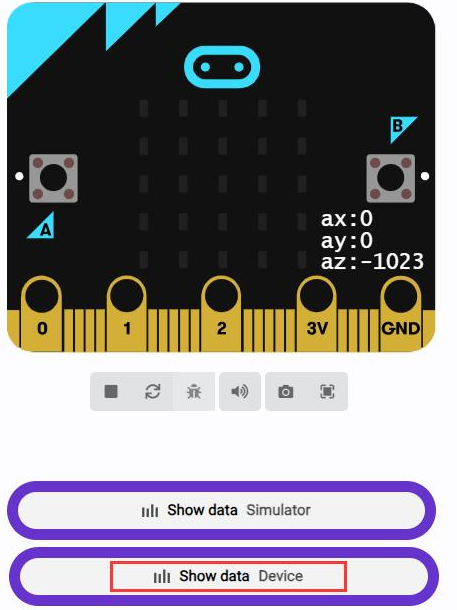
シミュレーターの下にある「Show Data Device」をクリックします。
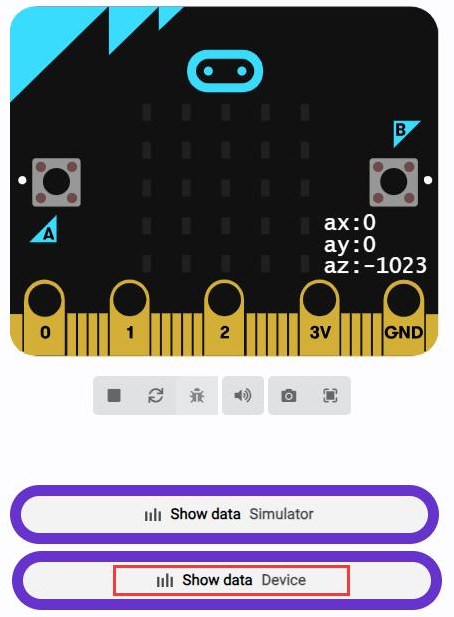
データビューウィンドウに、加速度センサーで検出されたX、Y、Z軸の値が表示されます。
2 次に、加速度センサーがmicro:bitの姿勢の変化を検出したときに、micro:bitがLEDマトリックスに対応する数値を表示するように新しいコードをアップロードしましょう。
手順:
USBケーブルでmicro:bitをコンピュータに接続します。
ダウンロードしたmicro:bit-Accelerometer-2.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitにフラッシュします。
または、ファイルを右クリックして「送る→ または、右クリックして「Send to→micro:bit」を選択します。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.9 microbit-Microphone-1 |
結果:コードがダウンロードされると、micro:bitのLEDマトリックスの中央に小さなハートが表示されます。micro:bitの近くで手を叩いてみてください。叩くたびに、LEDマトリックス上の小さなハートが大きなハートに変わります。
2 次に、新しいコードをMicro Bitにダウンロードし、音の大きさをLEDマトリックスに表示します。
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
ダウンロードしたmicro:bit-Microphone-2.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディター内からmicro:bitにフラッシュします。
または、右クリックして「Send to→micro:bit」を選択します。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
2.6.9 microbit-Microphone-2 |
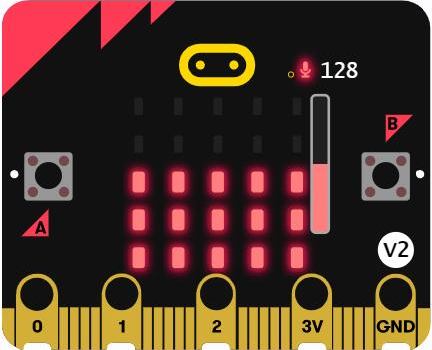
結果:コードがダウンロードされると、micro:bitの周囲の音が大きくなるほど、LEDが下から上へより多く点灯することに気づくでしょう。
3 .ロボットプロジェクト
3.1 ロボットプロジェクトの拡張機能の追加
ミニロボットカーのコーディング作業を簡素化するために、専用の拡張機能を作成しました。
拡張機能は、MakeCodeエディターの外部からインストールされ、ツールボックスに新しいブロックを追加する機能的なコードモジュールです。以前にArduinoを使用したことがある場合、ライブラリと呼ばれるものについてご存知かもしれません。これは、コアプログラミング言語の機能を拡張するコードのコレクションです。MakeCodeの拡張機能も同様に機能します。
提供されたhexファイルをMakecodeエディターにドラッグするか、「Import」ボタンを使用して提供されたhexファイルを開きます。ツールボックスリストに2つの追加拡張機能が表示されます。これらはすでにコードに含まれています。
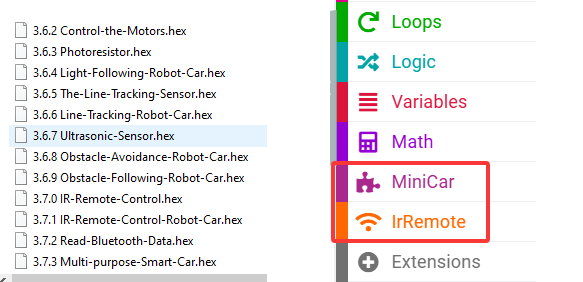
つまり、提供されたhexファイルを使用する場合、これらの拡張機能をMakecodeエディターに追加する必要はありません。
注:
1. このロボットカーを制御するためにブロックをドラッグ&ドロップして新しいプロジェクトを作成したい場合は、新しいブロックを使用してコードを完成させるために、提供されている拡張機能を追加する必要があります。
2. 新しいMakeCodeプロジェクトを作成するたびに、拡張機能を再度ロードする必要があります。
拡張機能の追加方法
以下のリンクを検索ボックスにコピー&ペーストし、「Enter」を押して検索します。
https://github.com/keyestudio2019/MiniCar
拡張機能の更新または削除方法
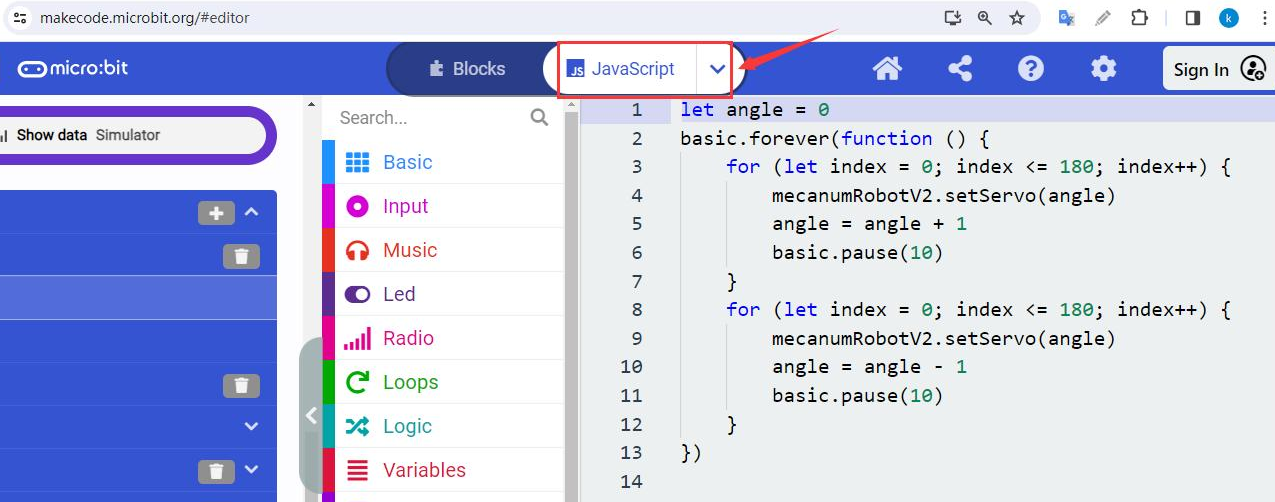
「JavaScript」ボタンをクリックしてテキストコードに切り替えます。
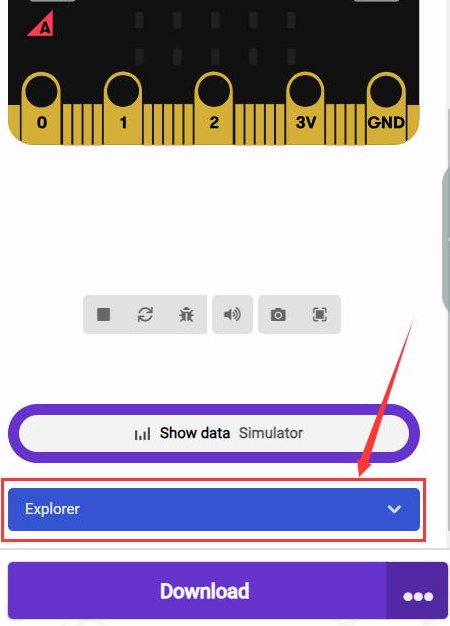
シミュレーターの下にあるエクスプローラーボタンを見つけます。
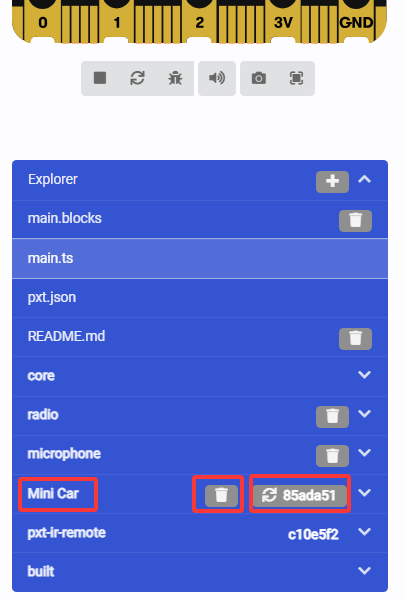
拡張リストでMini Carを見つけます。
ゴミ箱アイコンをクリックして拡張機能を削除します。
更新アイコンをクリックして拡張機能を更新します。
3.6.1 RGBヘッドライト

ロボットカーの2つのRGBヘッドライトを点灯させ、赤、緑、青、シアン、赤褐色、黄、白の順に1秒ごとに点滅させましょう。
手順:
ロボットカーのmicro:bitをUSBケーブルでコンピューターに接続します。
ダウンロードしたRGB-Headlights.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディター内からmicro:bitにフラッシュします。
または、右クリックして「Send to→micro:bit」を選択します。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
3.6.1RGB-Headlights |
結果: コードをダウンロードすると、ロボットカーのRGBヘッドライトが赤、緑、青、シアン、赤褐色、黄、白の順に1秒ごとに切り替わります。microbitのUSB電源を切断すると、ロボットカーの電源スライドスイッチをオンにして、バッテリーから電源を供給できます。
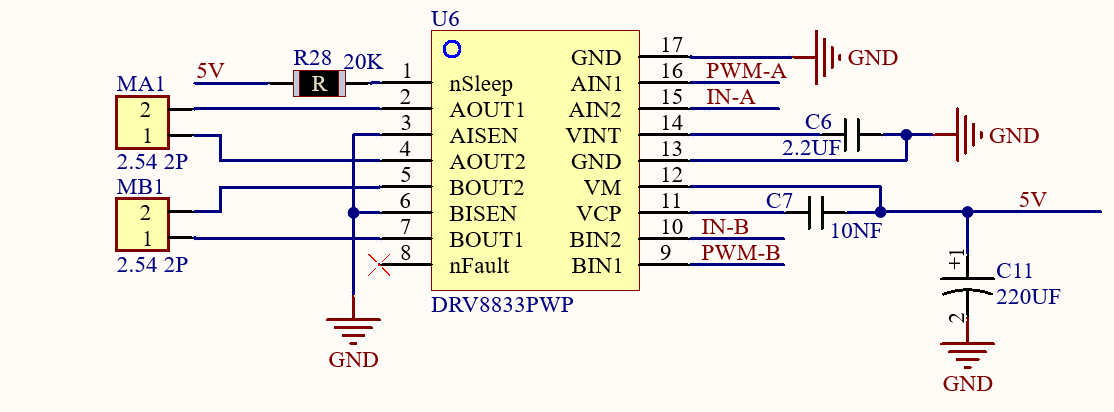
回路図
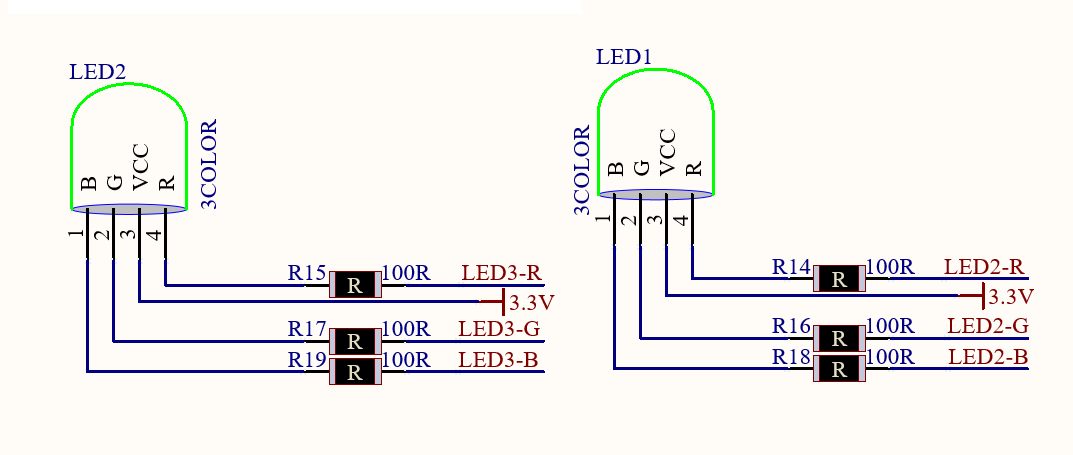
動作原理:Micro:bitはホストとして、IICを介してスレーブSTC8G1K08に命令を送信し、スレーブはPWMを出力してRGB LEDライトを制御します。これにより、IICが2つのモーターと2つのRGB LEDライトを制御できるため、microbitボードのIOポートが大幅に節約されます。
3.6.2 モーターの制御
ロボットカーには2つのDCギアモーターが搭載されており、これは通常のDCモーターを改良したものです。ギア減速機が組み合わされており、低速で大きなトルクを提供します。さらに、減速機の異なる減速比により、異なる速度とトルクを提供できます。
減速モーターは、ギアモーターとモーターを統合したもので、鉄鋼業や機械産業で広く応用されています。
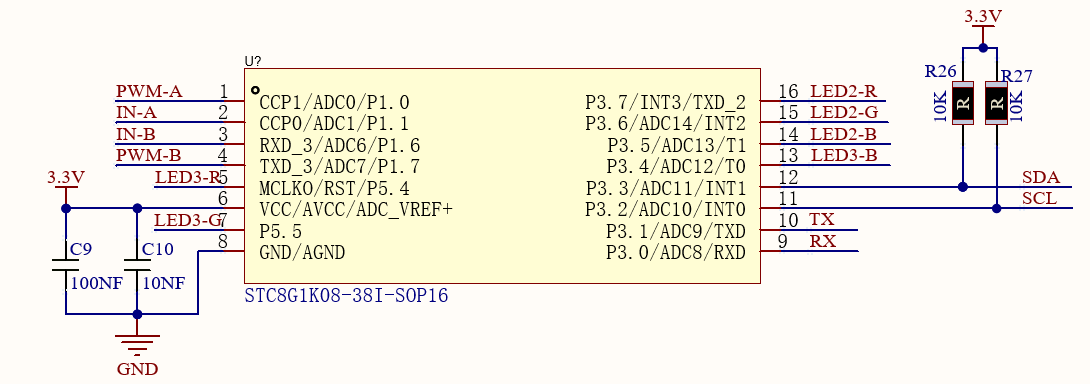
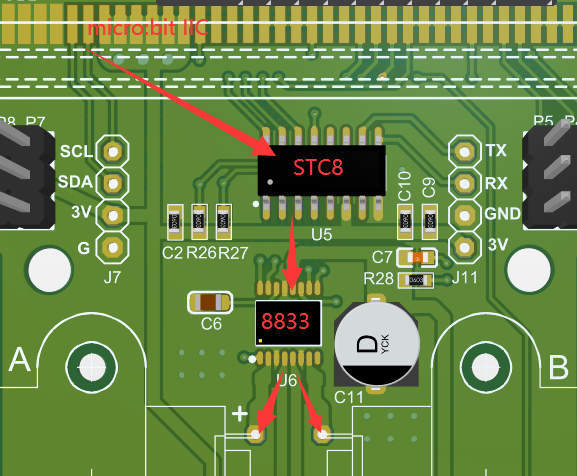
さらに、この車にはSTC8G1K08とHR8833MTEチップが搭載されています。IOポートを節約するため、micro:bitのIICを介してSTC8G1K08チップに命令を送信し、STC8G1K08チップは対応する命令に従ってHR8833MTEチップを制御し、2つのDC減速モーターの回転方向と速度を制御します(制御プロセスは以下の通りです)。
回路図
ロボットカーを1秒間前進させ、1秒間後退させ、1秒間左に曲がり、1秒間右に曲がり、1秒間停止させる新しいコードをダウンロードしましょう。
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
コードのダウンロードが完了した後、ロボットが動いてテーブルから落ちるのを防ぐため、ロボットカーベースのPOWERスライドスイッチをオフにします。
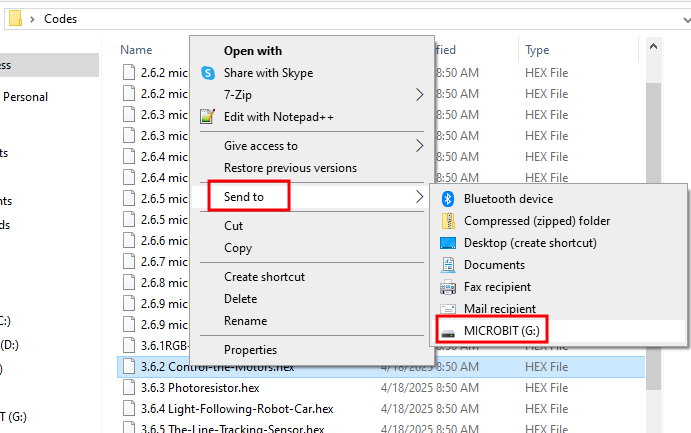
ダウンロードしたControl-the-Motors.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディター内からmicro:bitにフラッシュします。
または、右クリックして「Send to→micro:bit」を選択します。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hexファイル |
Codes |
3.6.2 Control-the-Motors |
結果: microbitのUSB電源を切断し、地面に置き、ロボットカーの電源スライドスイッチをオンにすると、ロボットカーは1秒間前進し、1秒間後退し、1秒間左に曲がり、1秒間右に曲がり、1秒間停止します。
3.6.3 フォトレジスタ
光電池またはフォトレジスタは、光が当たると抵抗が変化するセンサー コードが正常にダウンロードされた後、ロボットが動いてテーブルから落ちるのを防ぐため、車のベースにあるPOWERスライドスイッチをオフにしてください。
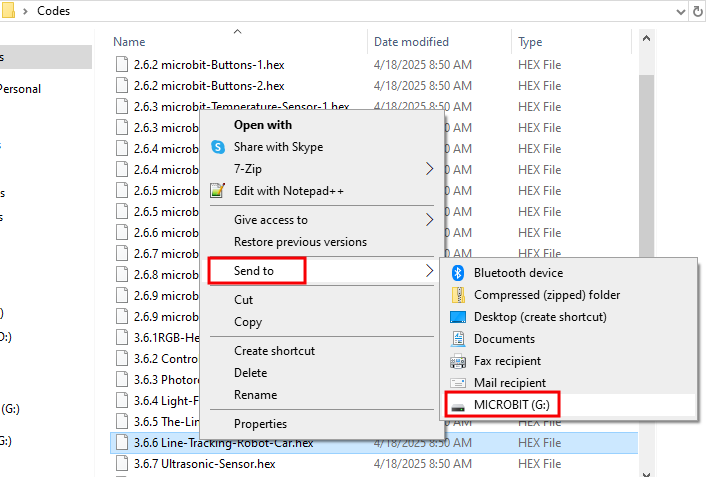
ダウンロードしたLine-Tracking-Robot-Car.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitに書き込みます。
または、右クリックして「送る→micro:bit」を選択することもできます。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hex file |
Codes |
3.6.6 Line-Tracking-Robot-Car |
結果:
コードがダウンロードされたら、ロボットを紙の上に置き、ライントラッキングセンサーを黒い線に合わせます。
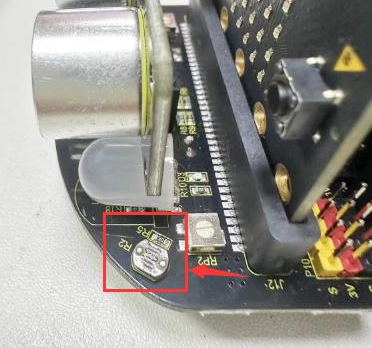
ポテンショメータの調整:
カートが適切にラインを追従しない場合は、次のようにポテンショメータを調整してください。
コースコードをアップロードします。
車を正面に向けて配置します。左のポテンショメータを反時計回りに完全に回し、右のポテンショメータを時計回りに完全に回します。
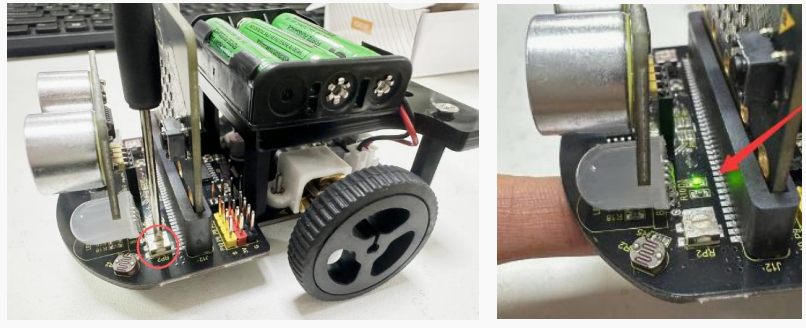
ビデオに示すように、車をトラックの白い部分に置きます。各ポテンショメータをゆっくりと調整し、隣のインジケータライトがちょうど点灯するまで調整します。車を手で持ち上げると、すべてのインジケータライトが消灯するはずです。
車のベースにある電源スイッチをオンにすると、ロボットカーは黒い線に沿って動きます。

注記:
この実験は強い日差しの下で行わないでください。日差しには赤外線や紫外線などの目に見えない光が多く含まれており、ライントラッキングセンサーの動作に影響を与えます。
ロボットが動作しない、またはラインを追従しない場合はどうすればよいですか?
バッテリーに十分な電力があるか確認してください。
マイナスドライバーを使用して、上部にある2つのポテンショメータを回し、センサーの感度を調整できます。指をセンサーに近づけると、オンボードLEDが点灯し、センサーの感度が良好であることを示します。
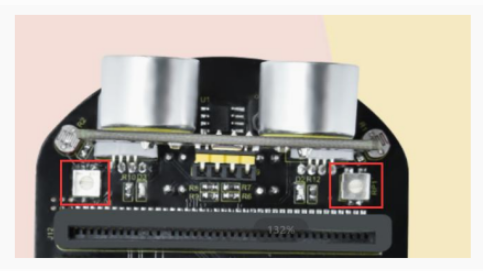
3.6.7 超音波センサー

超音波センサーモジュールの写真を見てみましょう。目のようなものが2つあり、1つは信号送信機(TRIG)、もう1つは信号受信機(ECHO)です。
動作原理:
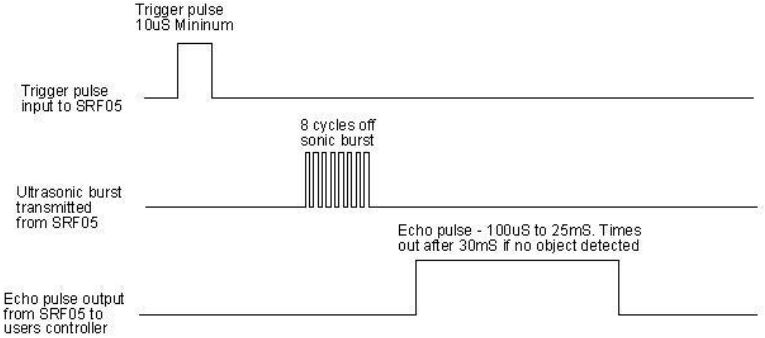
(1) まずTRIG (T) をローに引き下げ、次に少なくとも10usのハイレベル信号を与えてトリガーします。
(2) トリガー後、モジュールは自動的に8つの40KHZ方形波を送信し、信号の戻りがあるかどうかを自動的に検出します。
(3) 信号が戻ると、ECHO (E) を介してハイレベルが出力されます。ハイレベルの持続時間は、超音波の送信から受信までの時間です。
Then the test distance = the duration of high level *340m/s * 0.5
仕様:
動作電圧:3-5.5V (DC)
動作電流:50mA-100mA、通常は65mA
最大電力:0.5W
最大検出距離:約3m
ブラインドスポット:4cm未満
センシング角度:15度以下
インターフェース:2.54mmピッチの4ピンインターフェース
位置決め穴:直径3mm
動作温度:-10℃ - +60℃
寸法:49mmX22mmX19mm
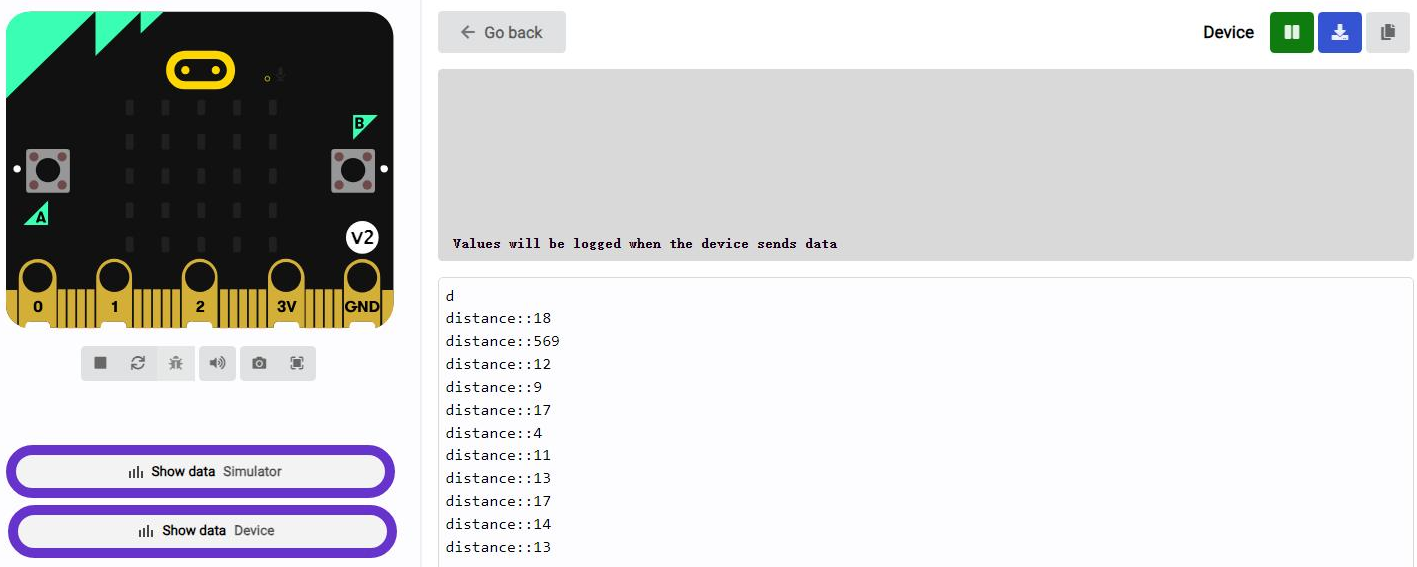
それでは、超音波センサーを使ってロボットの前の物体の距離を測定してみましょう。
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
車のベースにあるPOWERスライドスイッチをオンにします。ダウンロードしたUltrasonic-Sensor.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitに書き込みます。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hex file |
Codes |
3.6.7 Ultrasonic-Sensor |
結果: シミュレーターの下にある「Show data Device」ボタンをクリックします。超音波センサーで測定された前方の物体の距離が表示されます。
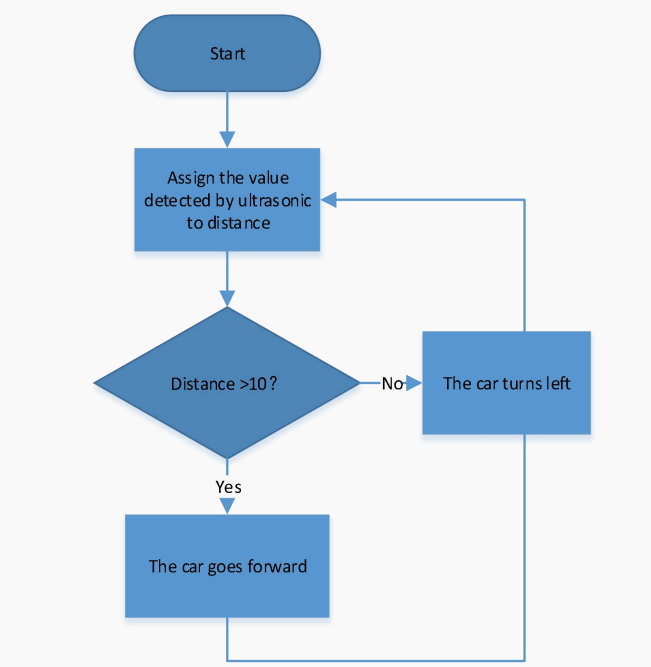
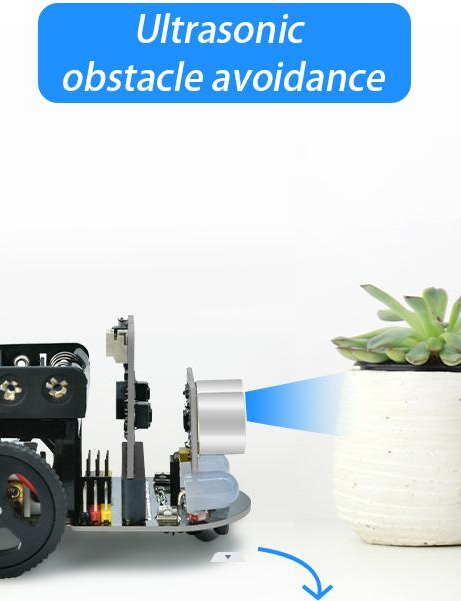
3.6.8 障害物回避ロボットカー
障害物回避ロボットは、経路上の障害物を自動的に感知し、回避できるインテリジェントなロボットです。
障害物回避ロボットを作りましょう!
動作原理:
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
コードが正常にダウンロードされた後、ロボットが動いてテーブルから落ちるのを防ぐため、POWERスライドスイッチをオフにしてください。
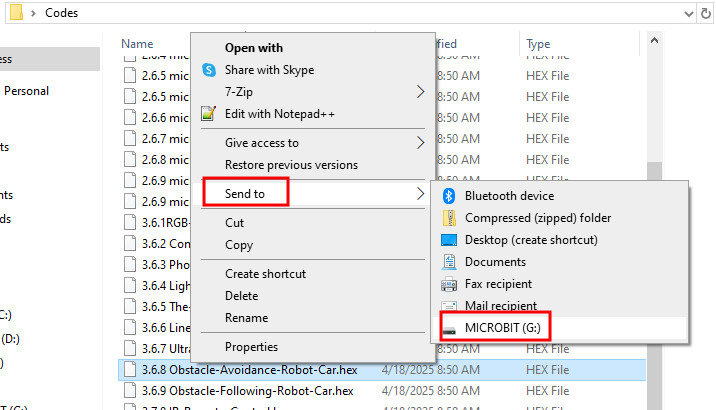
ダウンロードしたObstacle-Avoidance-Robot-Car.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitに書き込みます。
または、右クリックして「送る→micro:bit」を選択することもできます。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hex file |
Codes |
3.6.8 Obstacle-Avoidance-Robot-Car |
結果: ロボットを地面に置き、車のベースにある電源スイッチをオンにすると、ロボットカーは前進し、障害物を回避します。
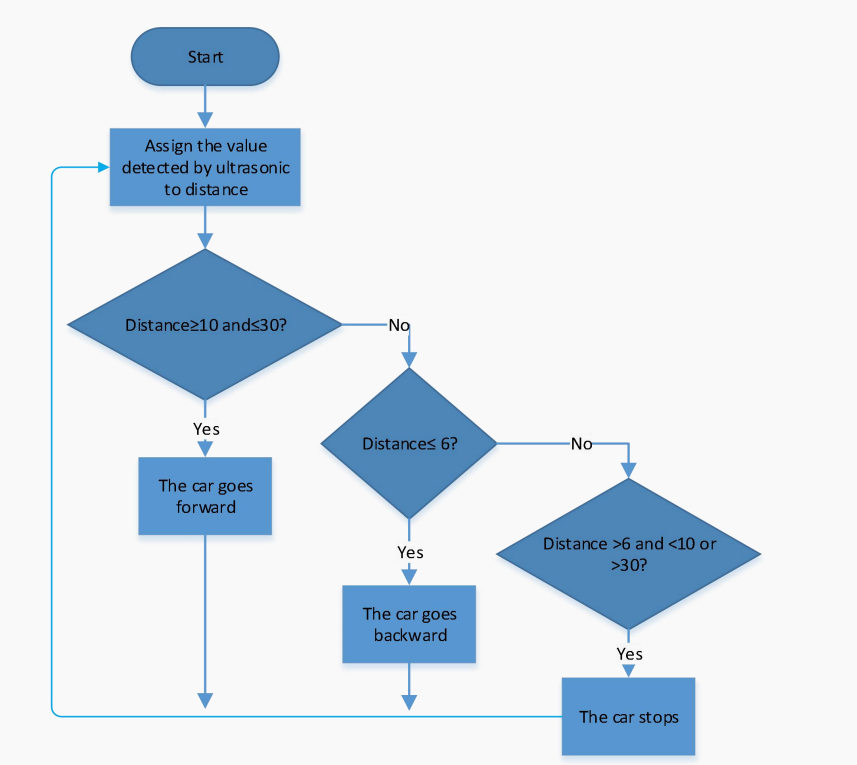
3.6.9 障害物追従ロボットカー
前の章とは逆に、このステップでは超音波追従カーを作成します。前方の障害物の表面は、超音波信号を超音波モジュールに返すのに十分な平坦さと大きさが必要です。
動作原理:
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
コードが正常にダウンロードされた後、ロボットが動いてテーブルから落ちるのを防ぐため、車のベースにあるPOWERスライドスイッチをオフにしてください。
ダウンロードしたObstacle-Following-Robot-Car.hexファイルを見つけ、Makecodeにドラッグして表示・分析し、WebUSBを使用してエディタ内からmicro:bitに書き込みます。
または、右クリックして「送る→micro:bit」を選択することもできます。
ファイルタイプ |
パス |
ファイル名 |
|---|---|---|
hex file |
Codes |
3.6.9 Obstacle-Following-Robot-Car |
結果: ロボットを地面に置き、車のベースにある電源スイッチをオンにすると、携帯電話や手のひらを超音波の前に置くと、ロボットがそれに追従します。

3.7.0 IRリモートコントロール
赤外線リモートコントロールは、テレビ、ステレオ、ビデオレコーダー、衛星受信機など、さまざまな家電製品を制御するために使用されます。赤外線リモートコントロールは、赤外線リモートコントロール、赤
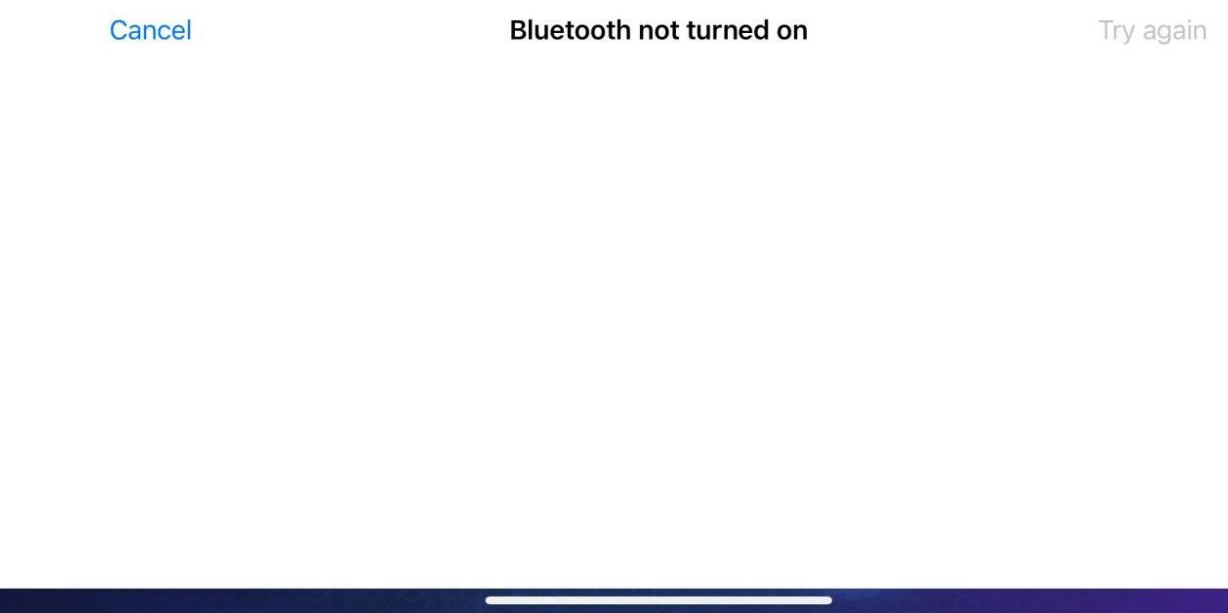
CONNECTボタンをクリックした後、ポップアップページが空白でBluetoothがオンになっていないと表示される場合は、アプリを終了して再起動し、もう一度お試しください。
以下の手順が完了していることを確認する必要もあります。
1). コードがmicro:bitにダウンロードされていること
2). バッテリーの電力が十分であり、車のベースの電源スイッチがオンになっていること。
4). スマートフォンのBluetoothと位置情報サービスがオンになっていること。
5). mini car APPがBluetoothへのアクセスを許可されていること。
Androidシステムデバイスの場合
Google Playでkeyes mini carを検索する。

インストールをクリックします。
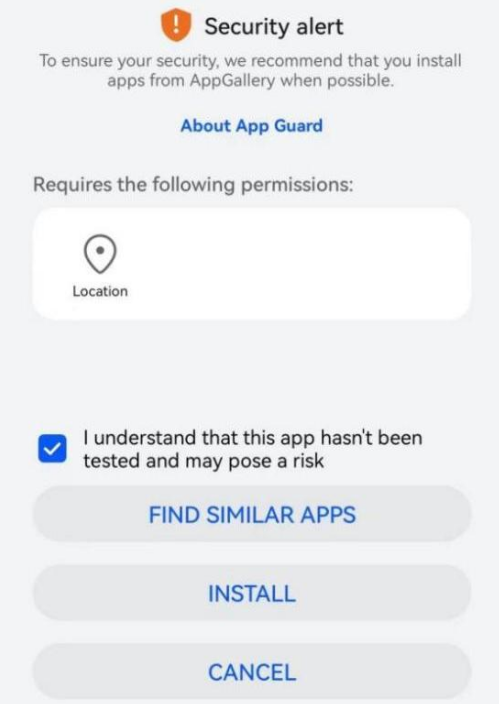
セキュリティ警告のポップアップが表示されます。このアプリは安全であることを保証しますので、安心してご利用ください。
このアプリはテストされておらず、リスクがある可能性があることを理解しています。を選択
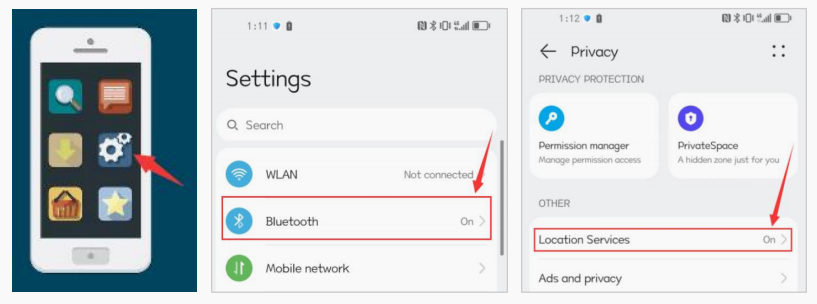
携帯電話の設定をクリックし、Bluetoothをオンにします。
プライバシーをクリックし、位置情報サービスをオンにします。
設定 > アプリとサービス > 権限マネージャーをクリックします。
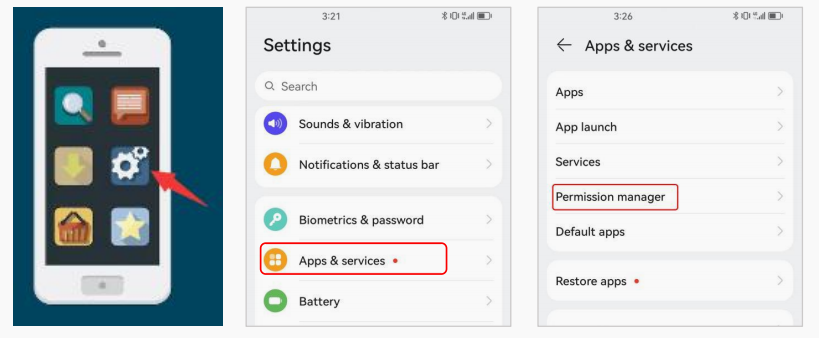
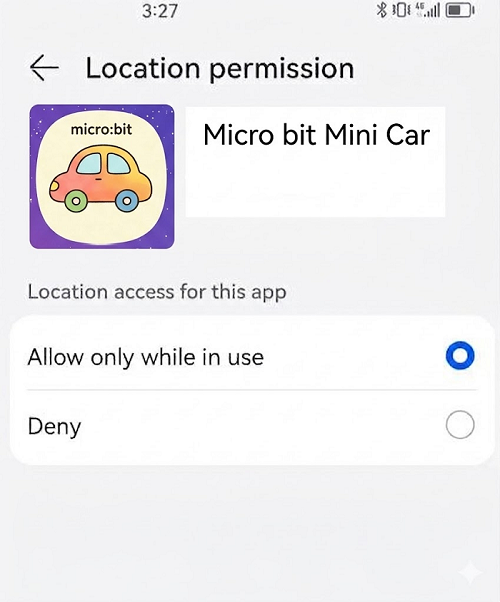
keyes mini car Bluetoothアプリを見つけ、アプリの権限オプションをクリックし、位置情報と近くのデバイスの権限を有効にします。(**注:**一部の携帯電話には近くのデバイスの権限機能がありません。)
keyes mini carアプリを開くをクリックします。

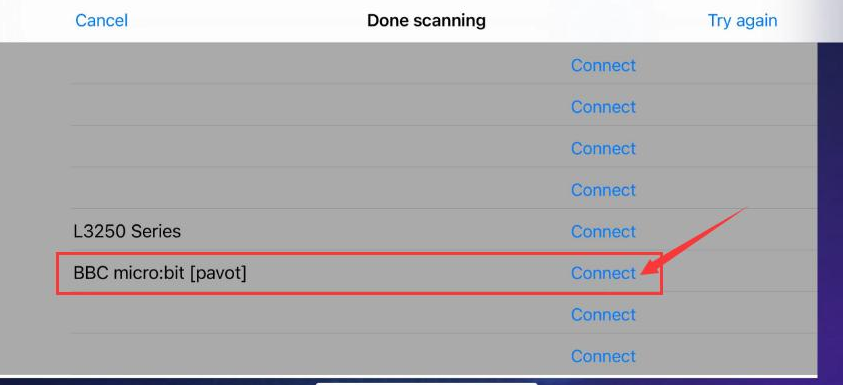
アプリのホームページの左上隅にあるCONNECTボタンをクリックします。
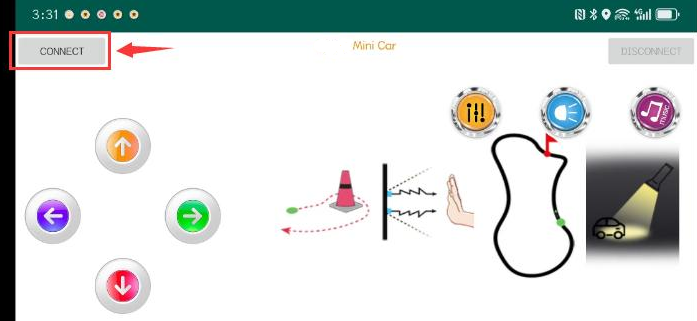
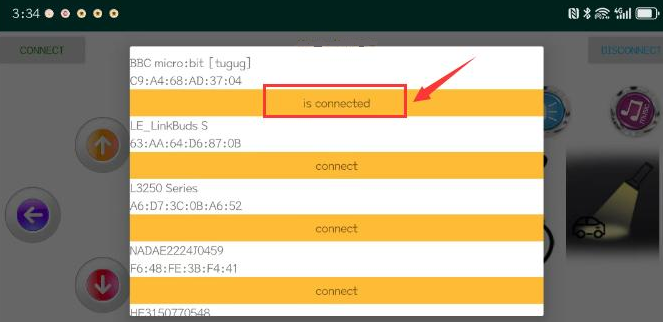
CONNECTボタンをクリックすると、Bluetoothリストがポップアップ表示されます。リストをスクロールしてBBC Micro:bitを見つけ、Connectをクリックします。「is connected」と表示されたら、ポップアップボックスの外の空白部分をクリックしてアプリのメインインターフェースに戻ります。
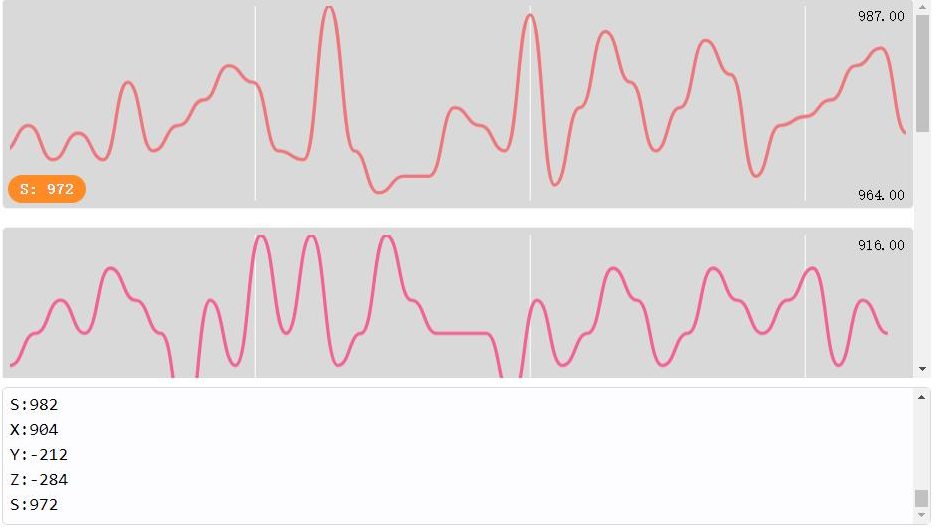
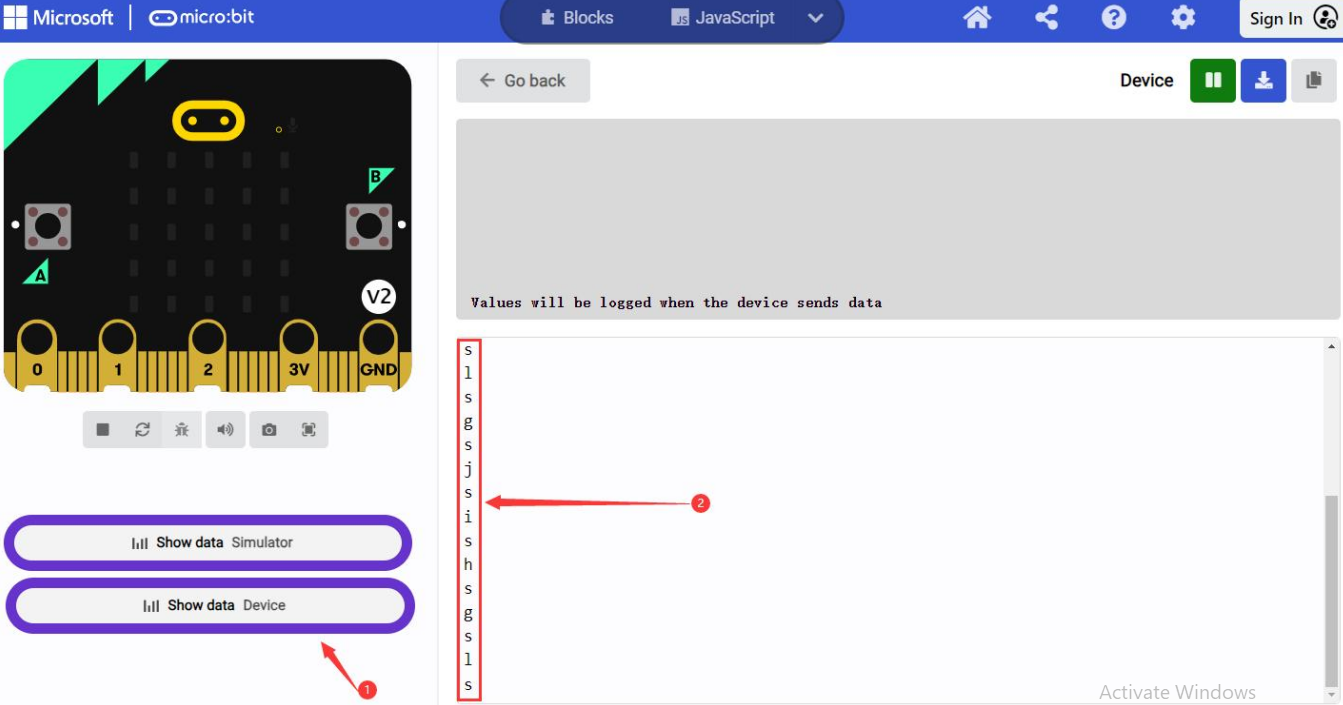
Makecodeエディターのシミュレーターの下にある「Show Data Device」をクリックします。
Bluetoothアプリのボタンをクリックすると、データビューウィンドウに対応する文字値が表示され、ボタンを離すと「S」が表示されます。
3.7.3 多目的スマートカー
前の章では、Bluetoothアプリのインストールと使用方法を学びました。このステップでは、Bluetoothアプリを使用してミニロボットカーを制御します。
手順:
USBケーブルでmicro:bitをコンピューターに接続します。
車のベースにあるPOWERスライドスイッチをオンにします。
ダウンロードしたMulti-purpose-Smart-Car.hexファイルを見つけ、Makecodeにドラッグして表示および分析し、WebUSBを使用してエディター内からmicro:bitにフラッシュします。
または、右クリックして「送る→micro:bit」を選択することもできます。
ファイルの種類 |
パス |
ファイル名 |
|---|---|---|
hex file |
Codes |
3.7.3 Multi-purpose-Smart-Car |
結果:
ロボットを地面に置き、車のベースの電源スイッチをオンにし、Bluetoothアプリをmicro:bitに接続すると、Bluetoothアプリを使用してロボットを制御できます。
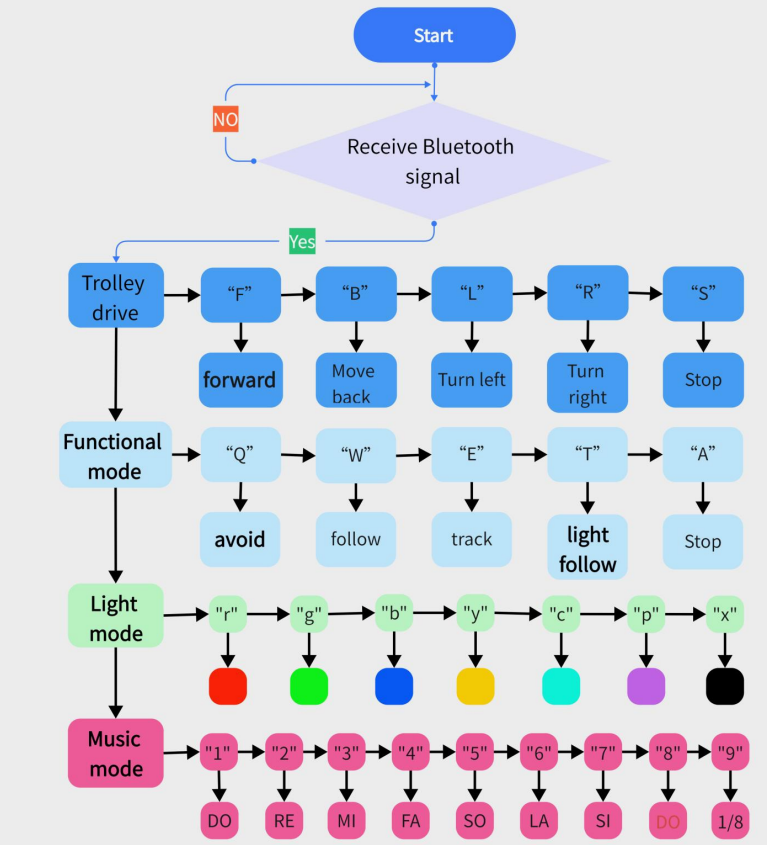
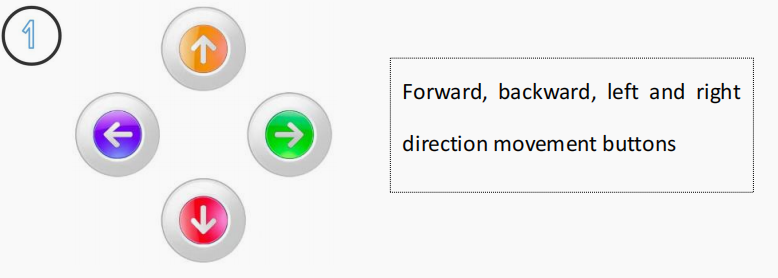
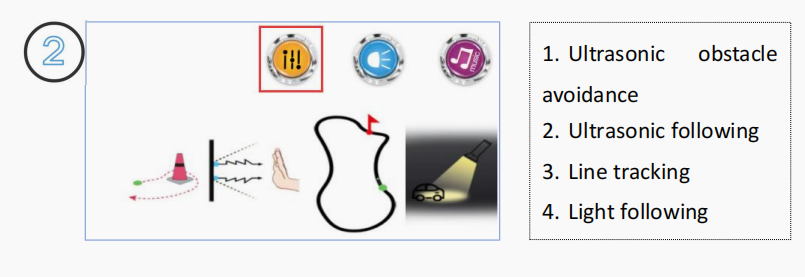
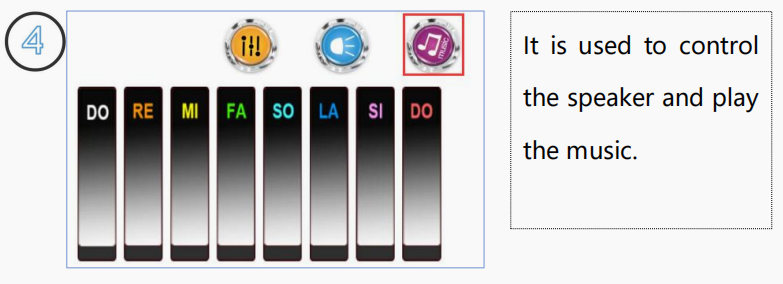
以下は、Bluetoothアプリインターフェースのボタンに対応する機能です。