5.1 Face Unlock
5.1.1 Overview
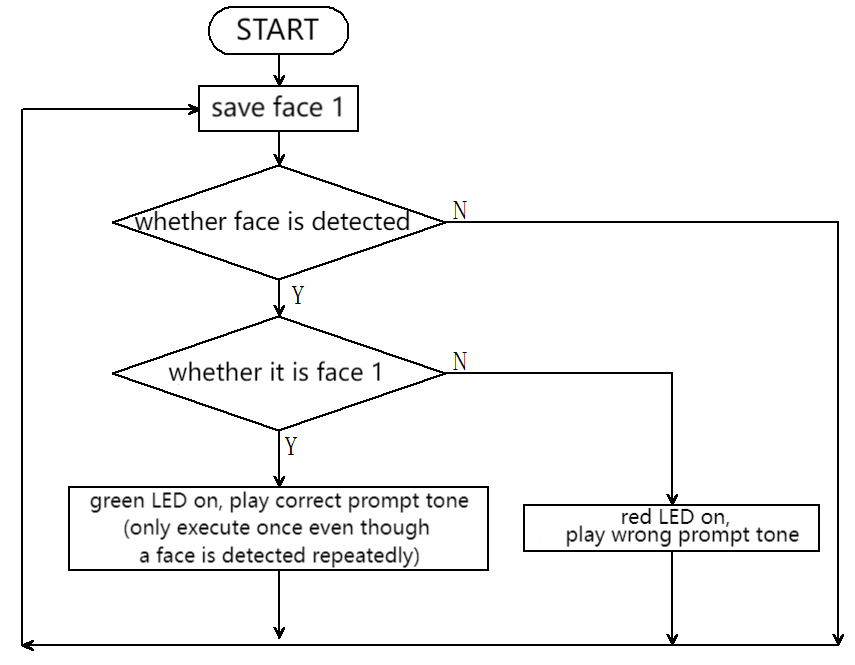
For face unlock, the module determines whether the face is a stored one. If it is, a correct prompt tone will be played with the green LED on; if not, an error prompt tone will be played with a red LED on. We can train and store faces by long-pressing the function button of the module, and then it will recognize the face by code.
5.1.2 Code Flow
5.1.3 Test Code
#include <Arduino.h> // Arduino core library
#include <Sentry.h> // Sentry machine vision sensor library
#include <Wire.h> // I2C communication library
#include <Adafruit_NeoPixel.h>
#define PIN A3
Adafruit_NeoPixel strip = Adafruit_NeoPixel(4, PIN, NEO_GRB + NEO_KHZ800);
// Create an alias Sengo for the Sengo1 type to simplify subsequent usage
typedef Sengo1 Sengo;
// Communication mode (currently enabled I2C).
#define SENGO_I2C
// #define SENGO_UART // UART serial communication solution (annotated as disabled)
// Include the corresponding library according to the selected communication mode
#ifdef SENGO_I2C
#include <Wire.h> // Libraries required for I2C communication
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // Soft serial library
#define TX_PIN 11 // Customize the TX pin
#define RX_PIN 10 // Customize the RX pin
SoftwareSerial mySerial(RX_PIN, TX_PIN); // Create a soft serial port object
#endif
#define speakerPin 3 // Speaker pin
// Global state variable
unsigned long lastDetectionTime = 0; // Finally, the timestamp of the face was detected
const unsigned long disappearDelay = 5000; // Face disappearance delay time (5 seconds)
bool currentFaceDetected = false; // Face 1 detected or not
// Define the visual processing type as face recognition
#define VISION_TYPE Sengo::kVisionFace
// Create a Sengo sensor object
Sengo sengo;
// Correct prompt tone: two crisp short tones
void playSuccessSound() {
for (int i = 0; i < 2; i++) {
tone(speakerPin, 1500); // 1500Hz high frequency
delay(100);
noTone(speakerPin);
delay(50); // Interval between tones
}
}
// Wrong prompt tone: single deep long note
void playErrorSound() {
tone(speakerPin, 300); // 300Hz low frequency
delay(500);
noTone(speakerPin);
}
// Fill the dots one after the other with a color
void colorWipe(uint32_t c, uint8_t wait) {
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
void setup() {
sentry_err_t err = SENTRY_OK; // Define the error state variable and initialize it to be error-free
Serial.begin(9600); // Initialize the serial port and set baud rate to 9600
Serial.println("Waiting for sengo initialize..."); // Print the initialization prompt
// Initialize the sensor according to the selected communication mode
#ifdef SENGO_I2C
Wire.begin(); // Initialize the I2C bus
// Keep trying to connect until succeed
// The yield() function allows ESP8266/ESP32 to handle background tasks during the waiting period
while (SENTRY_OK != sengo.begin(&Wire)) {
yield();
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // Initialize the soft serial port and set baud rate to 9600
// Keep trying to connect until succeed
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // Print the successful initialization information of the sensor
// Activate the machine face recognition function
err = sengo.VisionBegin(VISION_TYPE);
// Print the initialization result of face recognition
Serial.print("sengo.VisionBegin(kVisionFace) ");
if (err) {
Serial.print("Error: 0x"); // If an error occurs, print the error prefix
} else {
Serial.print("Success: 0x"); // If succeed, print the success prefix
}
Serial.println(err, HEX); // Print the error code in hexadecimal format
strip.begin();
strip.show(); // Initialize all pixels to 'off'
}
void loop() {
// Obtain the number of detected faces
int face_count = sengo.GetValue(VISION_TYPE, kStatus);
unsigned long currentMillis = millis();
// Face 1 is detected or not
if (face_count > 0) {
for (int i = 1; i <= face_count; ++i) {
int current_face_id = sengo.GetValue(VISION_TYPE, kLabel, i);
Serial.println(current_face_id);
if (current_face_id == 1 && !currentFaceDetected) {
lastDetectionTime = currentMillis; // Update the last detection time
currentFaceDetected = true;
colorWipe(strip.Color(0, 255, 0), 50); // Green LED on
playSuccessSound(); // Play corrent prompt tone
colorWipe(strip.Color(0, 0, 0), 50); // Lights out
} else if (current_face_id == 0 || current_face_id == 200) {
colorWipe(strip.Color(255, 0, 0), 50); // Red LED on
playErrorSound(); // Play wrong prompt tone
colorWipe(strip.Color(0, 0, 0), 50); // Lights out
}
}
}
// 5-second delay code
if (currentFaceDetected && (currentMillis - lastDetectionTime >= disappearDelay)) {
currentFaceDetected = false; // Exit the activation status
}
delay(300);
}
5.1.4 Test Result
After uploading the code, the AI vision module will detect the image captured by the camera to determine if there is a face. If there is, it will judge whether it is the one we set. If yes, the car will emit a correct prompt tone with green LED on. If not, the car will emit a wrong prompt sound with red LED on.