Projekt 12 Servo
1. Beschreibung
Dieser Servo zeichnet sich durch hohe Leistung und hohe Präzision mit einem maximalen Drehwinkel von 180° aus. Mit nur 9g Gewicht ist er perfekt geeignet für jede Miniatur-Anwendung in verschiedenen Einsatzbereichen. Darüber hinaus verfügt er über eine kurze Anlaufzeit, geringe Geräuschentwicklung und hohe Stabilität.
2. Funktionsprinzip
Winkelbereich: 180° (360°, 180° und 90°)
Betriebsspannung: 3,3V oder 5V
Pin: Drei Drähte
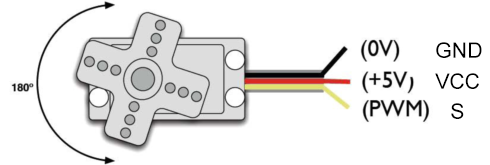
GND: Masse (braun)
VCC: Ein roter Pin, der mit +5V (3,3V) verbunden wird
S: Ein oranger Signalleitungs-Pin, der über PWM-Signal gesteuert wird
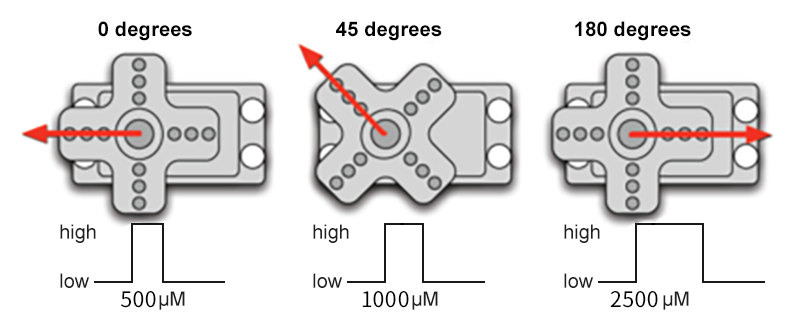
Steuerprinzip: Der Drehwinkel wird über das Tastverhältnis des PWM-Signals gesteuert. Theoretisch beträgt der Standard-PWM-Zyklus 20ms (50Hz), daher sollte die Pulsbreite im Bereich von 1ms bis 2ms liegen. Tatsächlich liegt die Pulsbreite jedoch zwischen 0,5ms und 2,5ms, was einem Winkel von 0° bis 180° entspricht. Beachten Sie, dass bei gleichem Signal der Drehwinkel je nach Servo-Hersteller variieren kann.
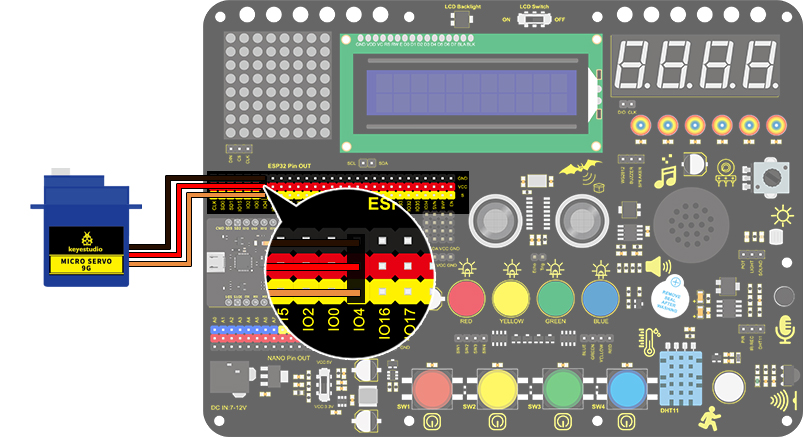
3. Schaltplan
4. Testcode
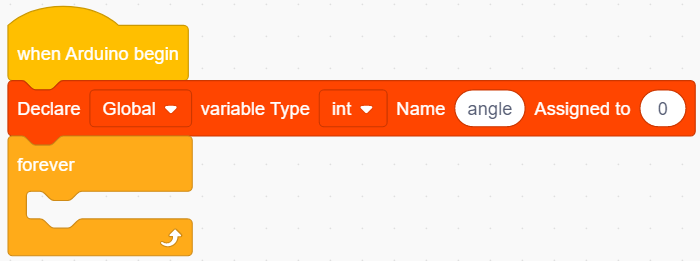
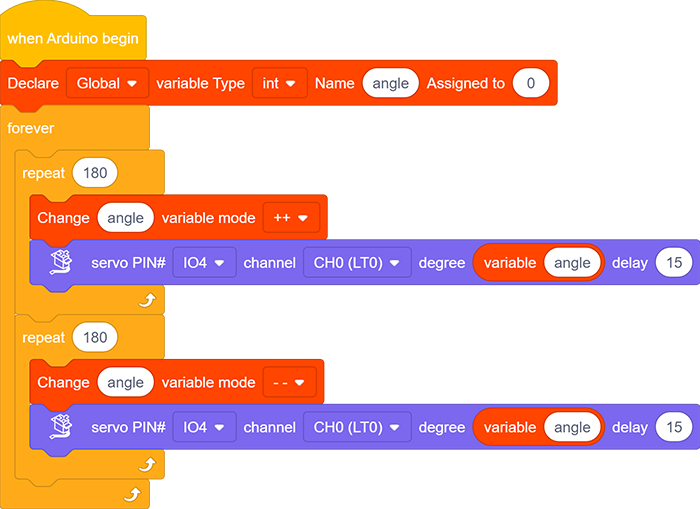
Ziehen Sie die beiden Basisblöcke und setzen Sie einen „Variable“-Block dazwischen. Stellen Sie den Variablentyp auf int, den Namen auf angle und weisen Sie den Anfangswert 0 zu.
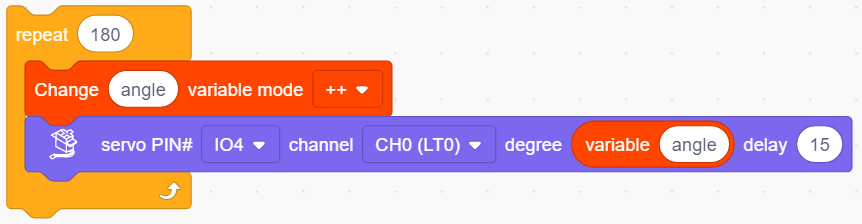
Servo dreht sich allmählich von 0° bis 180°:
Fügen Sie einen Wiederholungsblock hinzu und setzen Sie die Wiederholungsanzahl auf 180 (180 Winkel). Ziehen Sie einen „Variable ändern“-Block und einen „Servo“-Block hinein. Benennen Sie die Variable „angle“ und wählen Sie den Modus „++“. Stellen Sie den Servo-PIN auf IO4 und den Winkel auf die benannte Variable ein. Vergessen Sie nicht, eine Verzögerung von 15ms einzufügen.
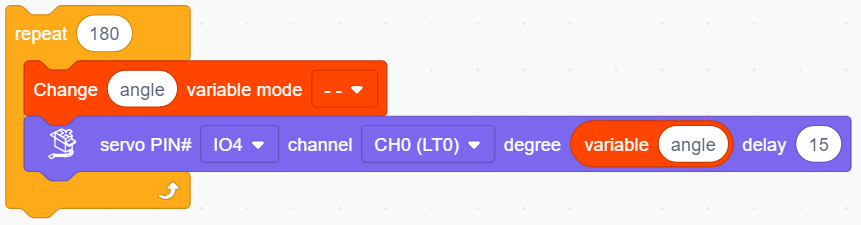
Servo dreht sich allmählich von 180° bis 0°: Wiederholen Sie Schritt 2, setzen Sie jedoch den Variablenmodus auf „–“.
Vollständiger Code:
5. Testergebnis
Nach Anschluss der Verkabelung und Hochladen des Codes beginnt der Servo, sich von 0° bis 180° und anschließend von 180° bis 0° zu drehen.
6. Code-Erklärung
Setzt die Werte des Servos. Servo-Pin und Drehwinkel können durch Parameter in diesem Block gesteuert werden.

Liest den aktuellen Winkel des Servos aus.
