9.3 Joystick Control Robot Arm (2)
9.3.5 Remember and repeat the action
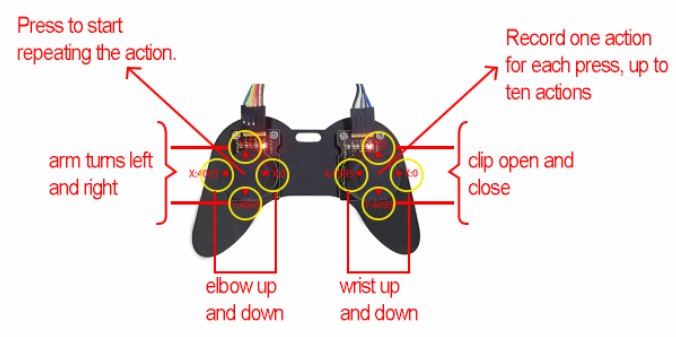
The current angle of the servo can be stored continuously for 10 times by pressing the button on the right joystick, and the action playback can be performed when we press the button on the left joystick.
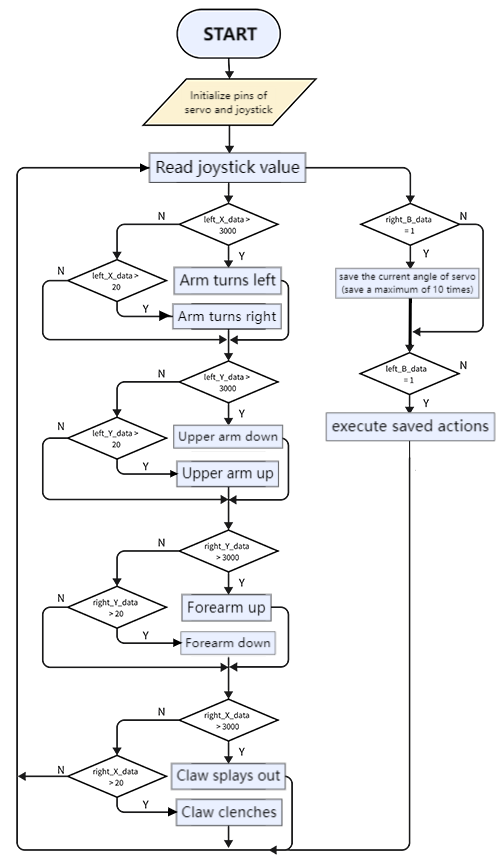
9.3.5.1 Flow
9.3.5.2 Code
Use the Arduino IDE to open this code directly from the tutorial package.
Connect the ESP32 board to the computer with the USB cable. Select board type “ESP32 Dev Module” and select port COM-XX (This depends on the number your computer assigns to the ESP32 board, which you can check it in the device manager).
Or you can copy and paste the code from below into the Arduino IDE.
/*
Keyestudio ESP32 Robot Arm
9-3-5 tutorial code
Function: joystick controls arm, axis z stores the rotation angle and re-plays the action
http://www.keyestudio.com
*/
#include "ESP32Servo.h"
Servo base; // create servo object to control a servo
Servo arm;
Servo forearm;
Servo gripper;
//Define servo control pin
#define basePin 16
#define armPin 17
#define forearmPin 2
#define gripperPin 4
//Define left joystick pin
#define left_B 12
#define left_X 13
#define left_Y 15
//Define right joystick pin
#define right_B 25
#define right_X 33
#define right_Y 32
int left_B_data, left_Y_data, left_X_data, right_B_data, right_X_data, right_Y_data;
//servo
int baseAngle = 90; // initialize base servo angle
int armAngle = 90; // initialize upper arm servo angle
int forearmAngle = 90; // initialize forearm servo angle
int gripperAngle = 90; // initialize claw servo angle
int attitude_data[4][11];
int base_attitude = 0;
int arm_attitude = 1;
int forearm_attitude = 2;
int gripper_attitude = 3;
int data_start_bit = 1;
int data_end_bit = 0;
void setup() {
// put your setup code here, to run once:
pinMode(left_B, INPUT);
pinMode(left_X, INPUT);
pinMode(left_Y, INPUT);
pinMode(right_B, INPUT);
pinMode(right_X, INPUT);
pinMode(right_Y, INPUT);
Serial.begin(9600);
base.attach(basePin); // attaches the servo on pin 16 to the servo object
arm.attach(armPin);
forearm.attach(forearmPin);
gripper.attach(gripperPin);
base.write(90);
arm.write(90);
forearm.write(90);
gripper.write(90);
}
void loop() {
// put your main code here, to run repeatedly:
left_B_data = digitalRead(left_B);
left_X_data = analogRead(left_X);
left_Y_data = analogRead(left_Y);
right_B_data = digitalRead(right_B);
right_X_data = analogRead(right_X);
right_Y_data = analogRead(right_Y);
attitude();
baseControl();
armControl();
forearmControl();
gripperControl();
}
//base control
void baseControl() {
if (left_X_data > 3000) {
while (analogRead(left_X) > 3000) {
base.write(baseAngle++);
if (baseAngle >= 180) baseAngle = 180;
delay(10);
}
} else if (left_X_data < 20) {
while (analogRead(left_X) < 20) {
base.write(baseAngle--);
if (baseAngle <= 0) baseAngle = 0;
delay(10);
}
}
}
//upper arm control
void armControl() {
if (left_Y_data > 3000) {
while (analogRead(left_Y) > 3000) {
arm.write(armAngle++);
if (armAngle >= 180) armAngle = 180;
delay(10);
}
} else if (left_Y_data < 20) {
while (analogRead(left_Y) < 20) {
arm.write(armAngle--);
if (armAngle <= 80) armAngle = 80;
delay(10);
}
}
}
//forearm control
void forearmControl() {
if (right_Y_data < 30) {
while (analogRead(right_Y) < 30) {
forearm.write(forearmAngle++);
if (forearmAngle >= 150) forearmAngle = 150;
delay(10);
}
} else if (right_Y_data > 3000) {
while (analogRead(right_Y) > 3000) {
forearm.write(forearmAngle--);
if (forearmAngle <= 30) forearmAngle = 30;
delay(10);
}
}
}
//claw control
void gripperControl() {
if (right_X_data > 3000) {
while (analogRead(right_X) > 3000) {
gripper.write(gripperAngle++);
if (gripperAngle >= 150) gripperAngle = 150;
delay(10);
// gripper.write(180);
}
} else if (right_X_data < 20) {
while (analogRead(right_X) < 20) {
// gripper.write(80);
gripper.write(gripperAngle--);
if (gripperAngle <= 90) gripperAngle = 90;
delay(10);
}
}
}
void attitude() {
if (right_B_data == 1) {
delay(10); //eliminate button jitters
if (right_B_data == 1) {
attitude_data[base_attitude][data_start_bit] = base.read();
delay(100);
attitude_data[arm_attitude][data_start_bit] = arm.read();
delay(100);
attitude_data[forearm_attitude][data_start_bit] = forearm.read();
delay(100);
attitude_data[gripper_attitude][data_start_bit] = gripper.read();
delay(100);
data_start_bit++;
data_end_bit = data_start_bit;
if (data_start_bit > 10) data_start_bit = 10;
}
}
if (left_B_data == 1) {
delay(10);
if (left_B_data == 1) {
data_start_bit = 1;
baseAngle = base.read();
armAngle = arm.read();
forearmAngle = forearm.read();
gripperAngle = gripper.read();
for (int i = 1; i < data_end_bit; i++) {
//base
if (baseAngle < attitude_data[base_attitude][i]) {
while (baseAngle < attitude_data[base_attitude][i]) {
base.write(baseAngle);
delay(10);
baseAngle++;
}
} else {
while (baseAngle > attitude_data[base_attitude][i]) {
base.write(baseAngle);
delay(10);
baseAngle--;
}
}
//upper arm
if (armAngle < attitude_data[arm_attitude][i]) {
while (armAngle < attitude_data[arm_attitude][i]) {
arm.write(armAngle);
delay(10);
armAngle++;
}
} else {
while (armAngle > attitude_data[arm_attitude][i]) {
arm.write(armAngle);
delay(10);
armAngle--;
}
}
//forearm
if (forearmAngle < attitude_data[forearm_attitude][i]) {
while (forearmAngle < attitude_data[forearm_attitude][i]) {
forearm.write(forearmAngle);
delay(10);
forearmAngle++;
}
} else {
while (forearmAngle > attitude_data[forearm_attitude][i]) {
forearm.write(forearmAngle);
delay(10);
forearmAngle--;
}
}
//claw
if (gripperAngle < attitude_data[gripper_attitude][i]) {
while (gripperAngle < attitude_data[gripper_attitude][i]) {
gripper.write(gripperAngle);
delay(10);
gripperAngle++;
}
} else {
while (gripperAngle > attitude_data[gripper_attitude][i]) {
gripper.write(gripperAngle);
delay(10);
gripperAngle--;
}
}
} //for end
}
}
}
9.3.5.3 Result
Every time you press the right joystick in the direction of acrylic, you can record an action, we can record up to 10 actions, after recording the action, press the left joystick in the direction of acrylic, the robot starts to execute the action just recorded.