Project 14 4 in 1 Complete Robot
1.Overview
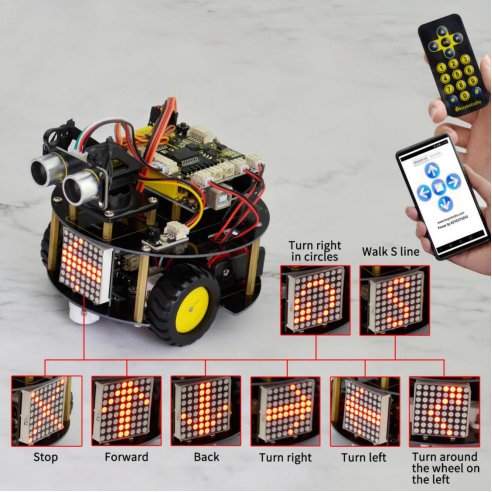
In the above projects, we have introduced four functions for the turtle robot, that is, line following, avoiding obstacles, IR control and Bluetooth remote control.
Now, let’s combine those functions together to make a complete robot. You can use the IR module to switch the functions.
2.Function switching methods
Powered on and aligned with the IR receiver, press the number 1 on the IR remote control, the turtle robot will enter the line tracking function. Then press the key OK, it will exist the tracking function.
If press the number 2, enter the obstacle avoidance function, and press OK to end that function.
If press the number 3, enter the S line forward, and press OK to end the function.
If press the number 4, the robot will turn around the wheel on the left, and press OK to end the function.
If press the number 5, the robot will turn a circle to the left, and press OK to end the function.
If press the number 6, the robot will turn a circle to the right, and press OK to end the function.
When exist the function modes, be able to control the car through infrared control or Phone-Bluetooth control.
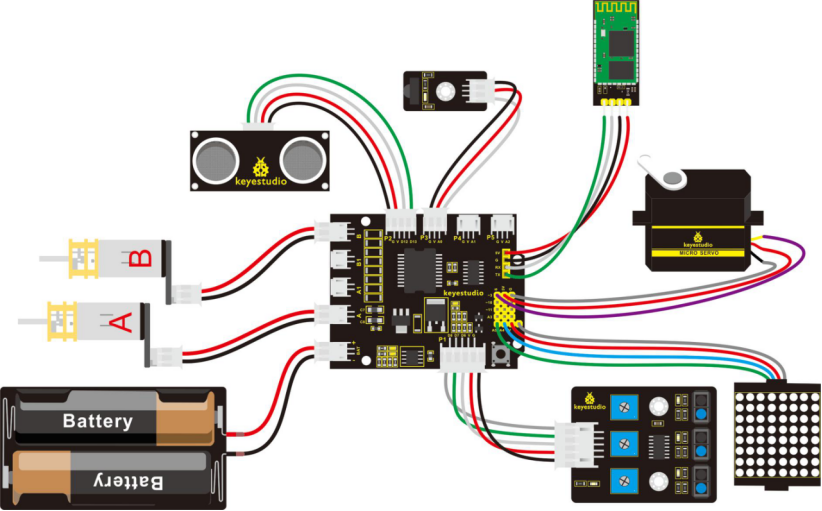
3.Hookup Guide
4.Test Code 18
// dot matrix
#include <Wire.h> // add IIC file
#include "Adafruit_LEDBackpack.h"
#include "Adafruit_GFX.h"
Adafruit_LEDBackpack matrix = Adafruit_LEDBackpack(); // build an object to control the dot matrix
// IR receiver
#include <IRremote.h> // add the IR receiver libraries
int RECV_PIN = A0; // define the IR receiver pin as A0
IRrecv irrecv(RECV_PIN);
decode_results results;
// decoding of IR remote control
const long IR_front = 0x00FF629D;
const long IR_back = 0x00FFA857;
const long IR_left = 0x00FF22DD;
const long IR_right = 0x00FFC23D;
const long IR_stop = 0x00FF02FD;
const long IR_1 = 0x00FF6897;
const long IR_2 = 0x00FF9867;
const long IR_3 = 0x00FFB04F;
const long IR_4 = 0x00FF30CF;
const long IR_5 = 0x00FF18E7;
const long IR_6 = 0x00FF7A85;
const long IR_7 = 0x00FF10EF;
const long IR_8 = 0x00FF38C7;
const long IR_9 = 0x00FF5AA5;
const long IR_0 = 0x00FF52AD;
// line following
const int S1 = 8; // the S1 tracking sensor control pin to D8
const int S2 = 7; // the S2 tracking sensor control pin to D7
const int S3 = 6; // the S3 tracking sensor control pin to D6
int s1,s2,s3; // define 3 variables,separately used to receive the digital value read by 3 tracking sensors(0 or 1)
// avoiding obstacles
const int servopin=3;// define the digital 3 to connect to servo signal line
//int myangle;// define the angle
//int pulsewidth;// define the pulsewidth
#include <SR04.h> // add the ultrasonic libraries
#define TRIG_PIN 12 // define the pin ting of ultrasonic as D12
#define ECHO_PIN 13 // define the pin echo of ultrasonic as D13
SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); // build an object to control the ultrasonic
long a,a1,a2; // used to receive the distance measured by ultrasonic
// end the obstacle avoidance
// control two motors
#define INT_A 2 // control the left motor direction pin as D2
#define INT_B 4 // control the right motor direction pin as D4
#define left_A 9 // control the left motor speed pin as D9
#define right_B 5 //control the right motor direction pin as D5
long val; // define a variable to receive the signal from IR transmitter
int i=0;
void setup()
{
Serial.begin(9600); // set the baud rate of serial monitor to 9600
irrecv.enableIRIn(); // Start the receiver
delay(100); // delay 100ms
pinMode(INT_A,OUTPUT); // set the motor control pin as OUTPUT
pinMode(INT_B,OUTPUT);
pinMode(left_A,OUTPUT);
pinMode(right_B,OUTPUT);
// DOT matrix
matrix.begin(0x70); // pass in the address
chushi(); // initial matrix display
pinMode(servopin,OUTPUT);// set the servo pin as OUTPUT
// make the ultrasonic turn front
for(int i=0;i<=100;i++) // give enough time to servo to rotate to specific angle
{
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(1200);// delay the microseconds of pulsewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delayMicroseconds(18800);// delay the microseconds of pulsewidth
}
}
void loop()
{
i=1;
Bluetooth(); // Bluetooth control
if(irrecv.decode(&results)) // if receive the infrared signal
{
val = results.value; // assign the result to val
Serial.println(val,HEX); // print out the hexadecimal val value on the monitor
irrecv.resume(); // Receive the next value
}
switch(val) // perform the corresponding function for the data received
{
case IR_front: front(),qian(); break; // go front and display the front image //if val equals to IR_front(IR_front=0x00FF629D),perform front() and qian() these two subfunctions,break statement is used to exist the current function
case IR_back: back(),hou(); break; // backward and show the back image
case IR_left: left(),zuo(); break; // turn left and show the left image
case IR_right: right(),you(); break; // turn right and show the right image
case IR_stop: Stop(),ting(); break; // stop and show the stop image
case IR_1: xunji(),val=0; break; // enter the tracking function( press stop to end the function)
case IR_2: bizhang(),val=0; break; // enter the obstacle avoiding function( press stop to end the function)
case IR_3: left_l(),ZZ(); break; // turn around the wheel on the left
case IR_4: right_run(),YX(); break; // turn around to the right
case IR_5: front_s(); break; // go front in S line and display S image
case IR_6: left_run(),ZX(); break; // turn around to the left
default : printf("error");
}
}
// go front
void front()
{
digitalWrite(INT_A,LOW); // control the left motor turn forward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,200); // set the two motors’ speed (PWM=200)
analogWrite(right_B,200);
}
// go backward
void back()
{
digitalWrite(INT_A,HIGH); // control the left motor turn backward
digitalWrite(INT_B,HIGH); // control the right motor turn backward
analogWrite(left_A,200); // set the two motors’ speed(PWM=200)
analogWrite(right_B,200);
}
// turn left
void left()
{
digitalWrite(INT_A,HIGH); // control the left motor turn backward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,150); // set the two motors’ speed(PWM为150)
analogWrite(right_B,150);
}
//turn right
void right()
{
digitalWrite(INT_A,LOW); // control the left motor turn forward
digitalWrite(INT_B,HIGH); // control the right motor turn backward
analogWrite(left_A,150); // set the two motors’ speed(PWM为150)
analogWrite(right_B,150);
}
// stop
void Stop()
{
digitalWrite(INT_A,LOW);
digitalWrite(INT_B,LOW);
analogWrite(left_A,0); // both PWM are 0
analogWrite(right_B,0);
}
// turn around the wheel on the left
void left_l()
{
digitalWrite(INT_A,HIGH); // control the left motor turn backward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,0); //left PWM=0,means that the left wheel stops
analogWrite(right_B,255); //right PWM=255,right wheel goes forward
}
// turn around to the right
void right_run()
{
digitalWrite(INT_A,LOW); //control the left motor turn forward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,255); // left motor PWM=255
analogWrite(right_B,100); // right motor PWM=100
}
// turn around to the left
void left_run()
{
digitalWrite(INT_A,LOW); // control the left motor turn forward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,200); // left motor PWM=100
analogWrite(right_B,100); // right motor PWM=200 (turn a circle to the left)
}
// go front in S line
void front_s()
{
S();
while(i>0)
{
digitalWrite(INT_A,LOW); // control the left motor turn forward
digitalWrite(INT_B,LOW); // control the right motor turn forward
analogWrite(left_A,50); // left motor PWM=100
analogWrite(right_B,255); // right motor PWM=255 ( walk in curved line to the left)
delay(300); //delay 1 second
analogWrite(left_A,255); //left motor PWM=255
analogWrite(right_B,50); //right motor PWM=100 ( walk in curved line to the right )
delay(300); //delay 1S
if(irrecv.decode(&results)) // if receive the infrared signal
{
irrecv.resume(); // Receive the next value
val=results.value; // assign the received data to val
if(val==IR_stop) // if receive the stop command
{
Stop(); // stop
break; // end the current function
}
}
}
}
////////////////////////matrix display image////////////////////////////
// front image
void qian()
{
matrix.displaybuffer[3] = B11111111;
matrix.displaybuffer[4] = B11111111;
matrix.displaybuffer[2] = B00000001;
matrix.displaybuffer[1] = B00000010;
matrix.displaybuffer[0] = B00000100;
matrix.displaybuffer[5] = B00000001;
matrix.displaybuffer[6] = B00000010;
matrix.displaybuffer[7] = B00000100;
matrix.writeDisplay();
}
// back image
void hou()
{
matrix.displaybuffer[3] = B11111111;
matrix.displaybuffer[4] = B11111111;
matrix.displaybuffer[2] = B00100000;
matrix.displaybuffer[1] = B00010000;
matrix.displaybuffer[0] = B00001000;
matrix.displaybuffer[5] = B00100000;
matrix.displaybuffer[6] = B00010000;
matrix.displaybuffer[7] = B00001000;
matrix.writeDisplay();
}
//right image
void you()
{
for(int i=0;i<8;i++)
{
matrix.displaybuffer[i] = B00001100;
}
matrix.displaybuffer[6] = B00011110;
matrix.displaybuffer[5] = B00101101;
matrix.displaybuffer[4] = B11001100;
matrix.writeDisplay();
}
// left image
void zuo()
{
for(int i=0;i<8;i++)
{
matrix.displaybuffer[i] = B00001100;
}
matrix.displaybuffer[1] = B00011110;
matrix.displaybuffer[2] = B00101101;
matrix.displaybuffer[3] = B11001100;
matrix.writeDisplay();
}
// stop image
void ting()
{
matrix.displaybuffer[0] = B11000000;
matrix.displaybuffer[1] = B00100001;
matrix.displaybuffer[2] = B00010010;
matrix.displaybuffer[3] = B00001100;
matrix.displaybuffer[4] = B00001100;
matrix.displaybuffer[5] = B00010010;
matrix.displaybuffer[6] = B00100001;
matrix.displaybuffer[7] = B11000000;
matrix.writeDisplay();
}
// initial display
void chushi()
{
for(int i=0;i<8;i++)
{
matrix.displaybuffer[i] = B10101010;
matrix.writeDisplay();
delay(100);
}
}
//turn around the wheel on the left
void ZZ()
{
matrix.displaybuffer[0] = B00000000;
matrix.displaybuffer[1] = B10000011;
matrix.displaybuffer[2] = B11000001;
matrix.displaybuffer[3] = B10100010;
matrix.displaybuffer[4] = B00010100;
matrix.displaybuffer[5] = B00001000;
matrix.displaybuffer[6] = B00000000;
matrix.displaybuffer[7] = B00000000;
matrix.writeDisplay();
}
//turn around to the left
void ZX()
{
matrix.displaybuffer[0] = B00000000;
matrix.displaybuffer[1] = B00011100;
matrix.displaybuffer[2] = B00100010;
matrix.displaybuffer[3] = B01000001;
matrix.displaybuffer[4] = B00000001;
matrix.displaybuffer[5] = B00111001;
matrix.displaybuffer[6] = B00110010;
matrix.displaybuffer[7] = B00101100;
matrix.writeDisplay();
}
//turn around to the right
void YX()
{
matrix.displaybuffer[0] = B00001100;
matrix.displaybuffer[1] = B00110010;
matrix.displaybuffer[2] = B00111001;
matrix.displaybuffer[3] = B00000001;
matrix.displaybuffer[4] = B00000001;
matrix.displaybuffer[5] = B00100010;
matrix.displaybuffer[6] = B00011100;
matrix.displaybuffer[7] = B00000000;
matrix.writeDisplay();
}
//S line
void S()
{
matrix.displaybuffer[0] = B00000000;
matrix.displaybuffer[1] = B00000000;
matrix.displaybuffer[2] = B00110001;
matrix.displaybuffer[3] = B11001000;
matrix.displaybuffer[4] = B11000100;
matrix.displaybuffer[5] = B00100011;
matrix.displaybuffer[6] = B00000000;
matrix.displaybuffer[7] = B00000000;
matrix.writeDisplay();
}
//*******************************line tracking*******************************//
void xunji()
{
while(val)
{
s1 = digitalRead(S1); // assign the digital value read from S1,S2,S3 pin to s1,s2,s3
s2 = digitalRead(S2);
s3 = digitalRead(S3);
if(s2==1) // if s2 pin detects a black line
{
if(s3==1 && s1==0) // if s3 detects a black line,s1 not detect
{
left(); // turn left
}
else if(s3==0 && s1==1) // if s3 not detect, but s1 detects
{
right(); // turn right
}
else // or else
{
front(); // go front
}
}
else //s2 not detect a black line
{
if(s3==1&&s1==0) // if s3 detects a black line
{
left(); // turn left
}
else if(s3==0&&s1==1) //s1 detects a black line
{
right(); // turn right
}
else // none detects a black line
{
Stop(); // stop
}
}
if(irrecv.decode(&results)) // if receive the infrared signal
{
irrecv.resume(); // Receive the next value
val=results.value; // assign the received data to val
if(val==IR_stop) // if receive the stop command
{
Stop(); //stop
break; // exist the current function
}
}
}
}
//************************* end tracking********************************//
//******************************* avoiding obstacles *****************************//
void bizhang()
{
while(val)
{
a=sr04.Distance(); // assign the front distance measured by ultrasonic to a
Serial.print(a); // print out the value a on the serial monitor
Serial.println("cm"); // print out cm and line wrap
delay(100); //delay
if(a<15) // if a is less than 15cm, yes to perform the program in the brace below
{
Stop(); // stop
delay(100); //delay 100ms
//servopulse(servopin,160);// call the pulse function to make the ultrasonic turn right in 90 degrees
// make the ultrasonic turn left in 90 degrees
for(int i=0;i<=100;i++) // give servo enough time to rotate to the specific angle
{
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(600);// the microseconds to delay plusewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delayMicroseconds(19400);// the microseconds to delay plusewidth
}
a1=sr04.Distance(); // assign the left obstacle distance measured by ultrasonic to a1
Serial.print("a1 = "); // on the serial monitor print out a1 =
Serial.print(a1); // print out the value of a1
Serial.println("cm"); // print out cm and line wrap
delay(100); // delay 100ms
//servopulse(servopin,20);//call the pulse function to make the ultrasonic turn left in 90 degrees
//make the ultrasonic turn right in 90 degrees
for(int i=0;i<=300;i++) // give servo enough time to rotate to the specific angle
{
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(1800);//the microseconds to delay pulsewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delayMicroseconds(18200);// the microseconds to delay pulsewidth
}
a2=sr04.Distance(); // assign the right obstacle distance measured by ultrasonic to a2
Serial.print("a2 = ");
Serial.print(a2);
Serial.println("cm");
delay(100);
if(a1<a2) //if a1 is greater than a2(whether left distance is greater than right one)
{
// servopulse(servopin,90);// call the pulse function to make the ultrasonic turn front
// make the ultrasonic turn front
for(int i=0;i<=200;i++) // give servo enough time to rotate to the specific angle
{
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(1200);// the microseconds to delay pulsewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delayMicroseconds(18800);// the microseconds to delay pulsewidth
}
left(); // TURN LEFT
delay(370); // delay 370ms,the time for car to turn left in 90 degrees as much as possible
front(); // go front
}
else // if a1<a2
{
//servopulse(servopin,90);// call the pulse function to make the ultrasonic turn front
// make the ultrasonic turn front
for(int i=0;i<=100;i++) // give servo enough time to rotate to the specific angle
{
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(1200);// the microseconds to delay pulsewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delayMicroseconds(18800);// the microseconds to delay pulsewidth
}
right(); // TURN RIGHT
delay(370); // delay 370ms,the time for car to turn right in 90 degrees as much as possible
front(); // go front
}
}
else // if a>15cm
{
front(); // continue to go forward
}
if(irrecv.decode(&results)) // if receive the infrared signal
{
irrecv.resume(); // Receive the next value
val=results.value; // assign the infrared data received to val
if(val==IR_stop) // if it is stop key
{
Stop(); // stop
break; // exist the current function
}
}
}
}
/*// servo
void servopulse(int servopin,int myangle)// define a pulse function
{
for(int i=0;i<50;i++)
{
pulsewidth=(myangle*11)+500;// convert the angle into pulsewidth of 500-2480
digitalWrite(servopin,HIGH);// set the servo pin to HIGH
delayMicroseconds(pulsewidth);// the microseconds to delay pulsewidth
digitalWrite(servopin,LOW);// set the servo pin to LOW
delay(20-pulsewidth/1000);
}
}*/
//*******************************end the obstacle avoiding function*********************************//
//*******************************Bluetooth*************************************//
void Bluetooth()
{
int temp; // define the variable, used to receive the data read by Bluetooth
if(Serial.available()) // if receive the data
{
temp = Serial.read(); // assign the data received to temp
}
switch(temp) // perform the corresponding function for the data received
{
case 'U': front(),qian(); break; // if val equals to U,perform front() and qian() subfunction,break statement means that exist the current function if receive other data.
case 'D': back(),hou(); break;
case 'L': left(),zuo(); break;
case 'R': right(),you(); break;
case 'S': Stop(),ting(); break;
default : printf("error");
}
}
5.Example Result
Done uploading the above code to control board, turn on the POWER button on the shield, then open APP, connect to Bluetooth, you should see the LED on the Bluetooth module is normally on.
Then use an IR remote control to select the function modes to make the robot run freely, showing the state image on the dot matrix display.