1. Iniziare con il robot 4WD
1.1 Introduzione
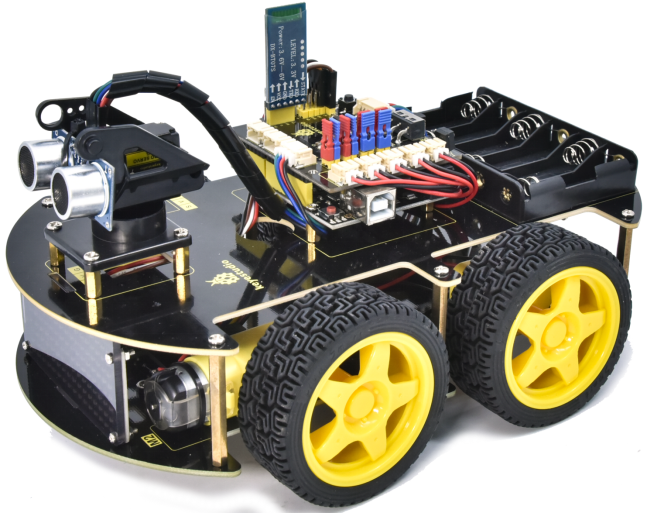
La nuova versione aggiornata dell’auto multiuso 4WD è uno dei set Arduino più popolari. Non solo ha un aspetto gradevole, ma anche funzioni potenti. Oltre alle consuete funzioni di tracciamento della linea, evitamento ostacoli e controllo remoto, utilizza anche espressioni facciali per creare simpatiche espressioni. Inoltre, puoi espandere i tuoi progetti personali o aggiungere altri sensori per completare le tue esplorazioni.
La maggior parte dei componenti è collegata tramite viti e distanziali in rame, permettendoti di costruire il tuo robot attraverso pochi semplici passaggi di assemblaggio.
Inoltre, sono accessibili per l’apprendimento conoscenze di base come il tracciamento della linea, i sensori di evitamento ostacoli, la misurazione ultrasonica, la comunicazione Bluetooth, i driver per motori e i telecomandi IR.
Questo prodotto offre 17 progetti di apprendimento, dal semplice al complesso, che ti guideranno nella realizzazione di un robot Arduino.
1.2 Lista del kit
# |
Nome |
Q.tà |
Immagine |
|---|---|---|---|
1 |
Scheda Keyestudio V4.0 (compatibile UNO) |
1 |
|
2 |
Scheda di espansione driver motore Keyestudio |
1 |
|
3 |
Modulo Bluetooth |
1 |
|
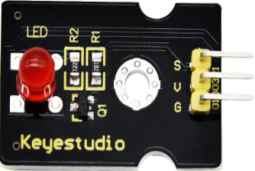
4 |
Modulo LED Rosso |
1 |
|
5 |
Sensore Ultrasonico |
1 |
|
6 |
Sensore di tracciamento linea Keyestudio |
1 |
|
7 |
Scheda LED 8*16 Keyestudio (cavo di connessione 4 pin) |
1 |
|
8 |
Servo |
1 |
|
9 |
Telecomando IR |
1 |
|
10 |
Cavo USB |
1 |
|
11 |
Porta batteria 18650 |
1 |
|
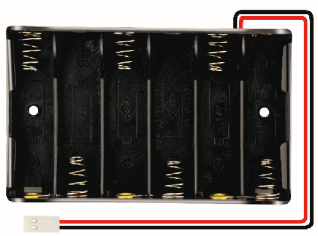
12 |
Porta batteria 6 AA |
1 |
|
13 |
Testa a culla |
1 |
|
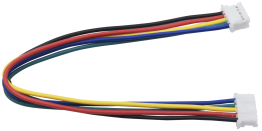
14 |
Cavo JST-PH2.0MM-5P 24AWG da 150MM |
1 |
|
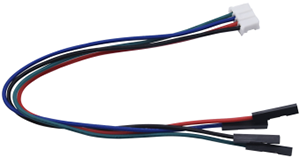
15 |
Cavo PH2.0mm-4P a Dupont 2.54 da 150MM |
1 |
|
16 |
Piastra acrilica |
1 |
|
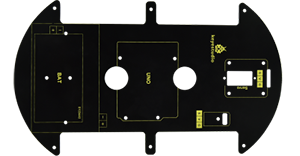
17 |
Scheda superiore Keyestudio |
1 |
|
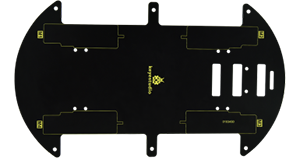
18 |
Scheda base Keyestudio |
1 |
|
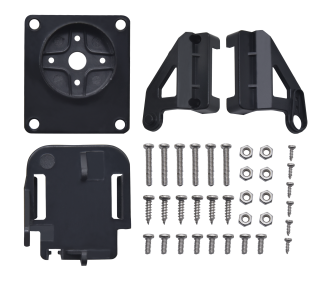
19 |
Parti di fissaggio |
4 |
|
20 |
Ruote |
4 |
|
21 |
Distanziale in rame passante doppio M3*10MM |
10 |
|
22 |
Distanziale in rame passante doppio M3*40MM |
4 |
|
23 |
Vite testa tonda M3*30MM |
8 |
|
24 |
Vite testa tonda M3*6MM |
40 |
|
25 |
Dado nichelato M3 |
16 |
|
26 |
Vite testa tonda M2*8MM |
6 |
|
27 |
Vite testa tonda M3*8MM |
4 |
|
28 |
Dado nichelato M2 |
6 |
|
29 |
Vite testa piatta M3*10MM |
3 |
|
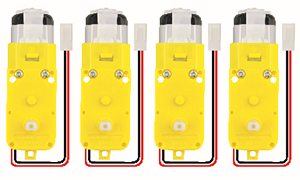
30 |
Motore |
4 |
|
31 |
Cacciavite |
1 |
|
32 |
Fascette nere |
6 |
|
33 |
Tubo avvolgente |
1 |
|
34 |
Cavo Dupont 3 pin F-F da 20CM |
1 |
|
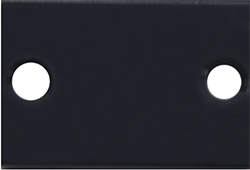
35 |
Scheda decorativa |
1 |
|
36 |
Cappuccio jumper blu |
4 |
|
37 |
Cappuccio jumper rosso |
4 |
|
38 |
Pista di tracciamento |
1 |
|


























1.3 Caratteristiche
Funzione multiuso: evitamento ostacoli, inseguimento, controllo remoto IR, controllo Bluetooth, confinamento in un cerchio, controllo della gravità e visualizzazione di emoticon facciali.
Montaggio semplice: nessuna saldatura del circuito richiesta, montaggio semplice.
Costruzione robusta: struttura 4WD, 4 motori e ruote di alta qualità.
Alta espandibilità: può espandere altri sensori e moduli tramite una scheda di espansione per driver motore.
Controlli multipli: controllo remoto IR, controllo tramite App (sistemi iOS e Android).
Programmazione di base: codice in linguaggio C per Arduino IDE.
1.4 Specifiche
Tensione di funzionamento: 5V
Tensione di ingresso: 6-9V
Corrente massima in uscita: 2A
Dissipazione massima di potenza: 25W (T=75℃)
Velocità motore: 5V 200 rpm
Modalità di pilotaggio motore: driver motore DRV8833
Angolo di induzione ultrasonica: <15 gradi
Distanza di rilevamento ultrasonico: 2cm-400cm
Distanza controllo remoto a infrarossi: 10M (misurata)
Distanza controllo remoto Bluetooth: 50M (misurata)
Controllo Bluetooth: supporta sistemi Android e iOS
1.5 Scheda di sviluppo
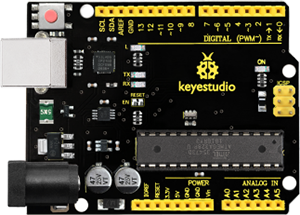
È importante sapere che la scheda di sviluppo keyestudio V4.0 è il cuore di questa 4WD BT Multi-purpose Car V2.0.
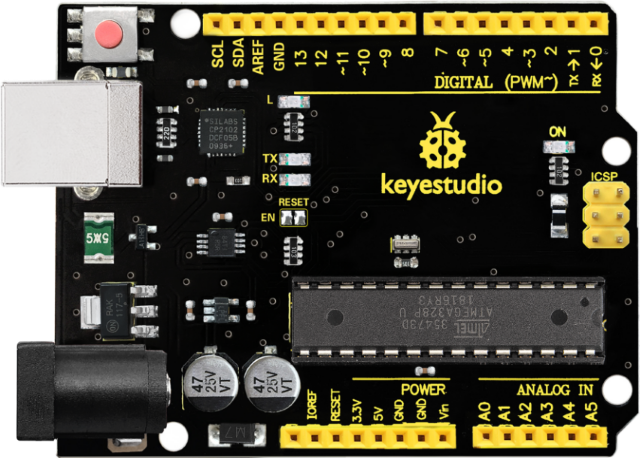
La scheda di sviluppo Keyestudio V4.0 è una scheda compatibile Arduino Uno, basata su MCU ATmega328P, con un chip CP2102 come convertitore UART-USB.
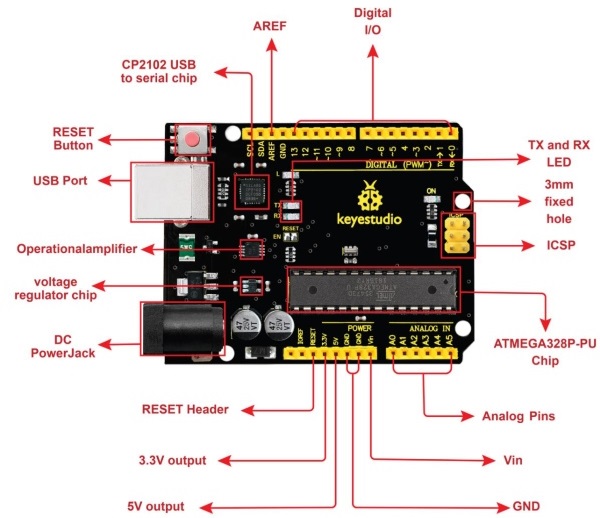
Dispone di 14 pin digitali di input/output (di cui 6 possono essere usati come uscite PWM), 6 ingressi analogici, un quarzo da 16 MHz, una connessione USB, un connettore di alimentazione, 2 header ICSP e un pulsante di reset.
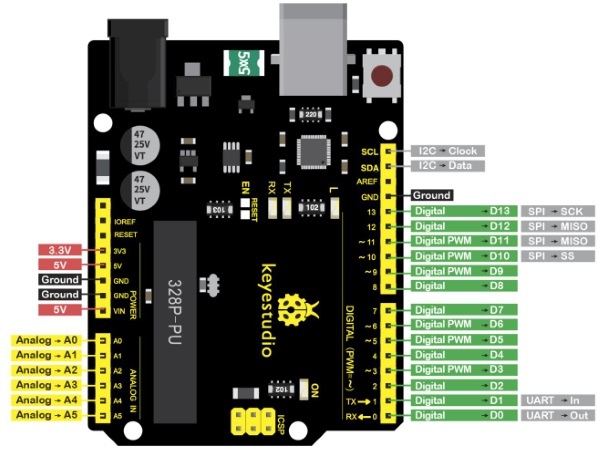
Contiene tutto il necessario per supportare il microcontrollore: basta collegarla a un computer tramite cavo USB o alimentarla tramite un connettore di alimentazione DC esterno (DC 7-12V) o tramite header femmina Vin/GND (DC 7-12V) per iniziare.
Microcontroller |
ATmega328P-PU |
|---|---|
Operating Voltage |
5V |
Input Voltage (recommended) |
DC 7-12V |
Digital I/O Pins |
14 (D0-D13) (di cui 6 forniscono uscita PWM) |
PWM Digital I/O Pins |
6 (D3, D5, D6, D9, D10, D11) |
Analog Input Pins |
6 (A0-A5) |
DC Current per I/O Pin |
20 mA |
DC Current for 3.3V Pin |
50 mA |
Flash Memory |
32 KB (ATmega328P-PU) di cui 0.5 KB utilizzati dal bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Clock Speed |
16 MHz |
Onboard LED |
D13 |
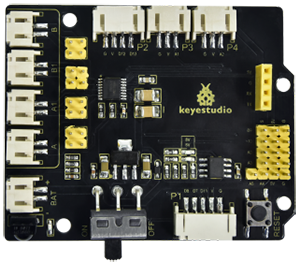
1.6 Motor shield
Descrizione:
La scheda 8833 adotta il chip driver motore 8833 pilotato da ponti H a due canali, e la corrente massima di pilotaggio di un singolo canale arriva fino a 1,5A, utilizzando il terminale PH2.0.
Il modulo ricevitore IR è integrato anch’esso sulla scheda. Inoltre, sulla scheda sono presenti molte interfacce di espansione PH2.0 come interfaccia ultrasonica, interfaccia analogica, interfaccia di tracciamento a tre canali, nonché interfacce pin per Bluetooth e driver motore.
Specifiche:
Tensione |
USB 5V,DC 6-9V |
|---|---|
Corrente |
L’uscita massima è 3A, l’uscita effettiva è circa 1A (2A quando il motore è caricato) |
Potenza massima |
27W(Il valore effettivo è circa 9W) |
Temperatura di lavoro |
-10~50 Gradi |
Dimensioni |
69x56x18mm |
Peso |
25.5g |
Attributi di protezione ambientale |
ROHS |
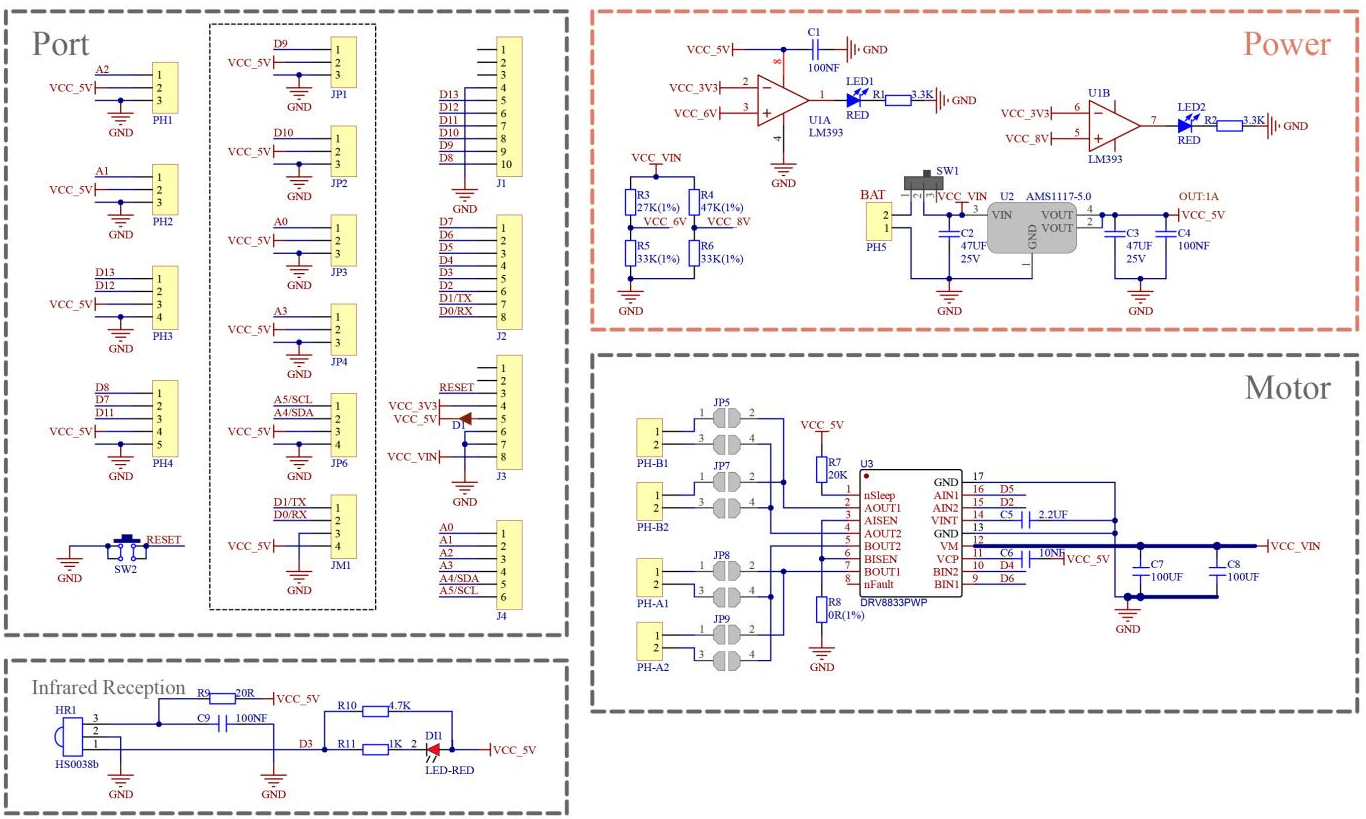
Funzione:
Schema elettrico: