2 Assemblaggio
parte 1
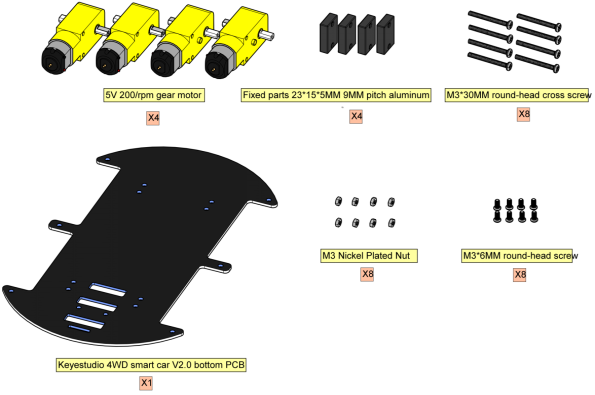
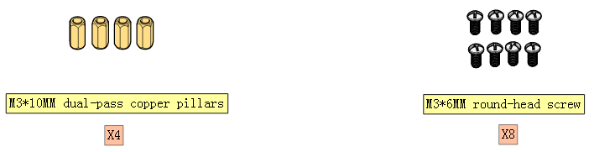
1.1. Componenti necessari.
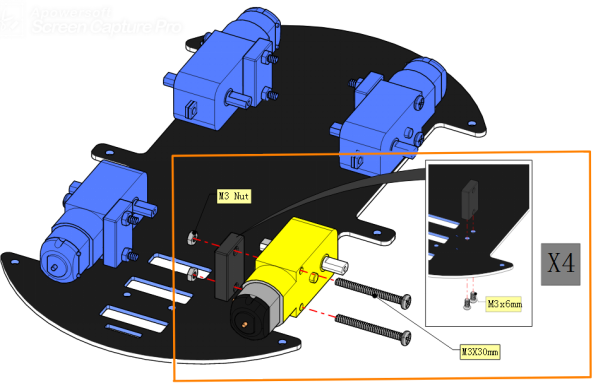
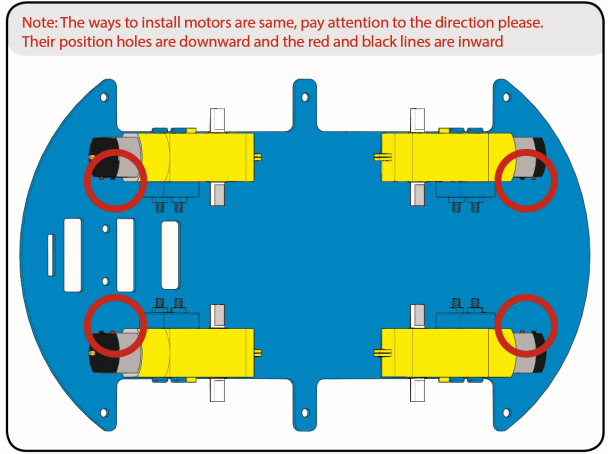
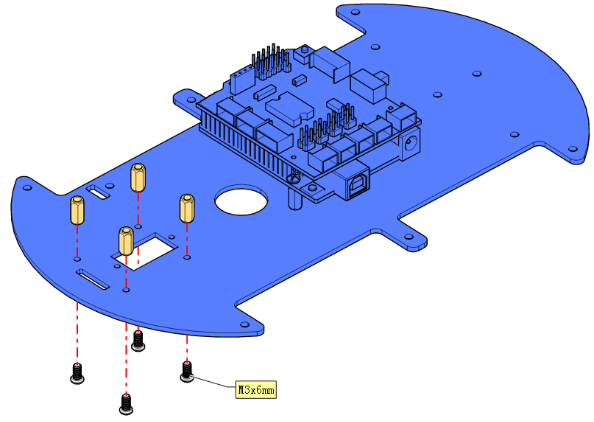
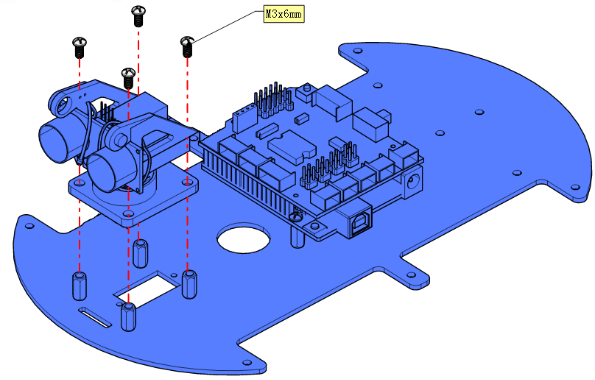
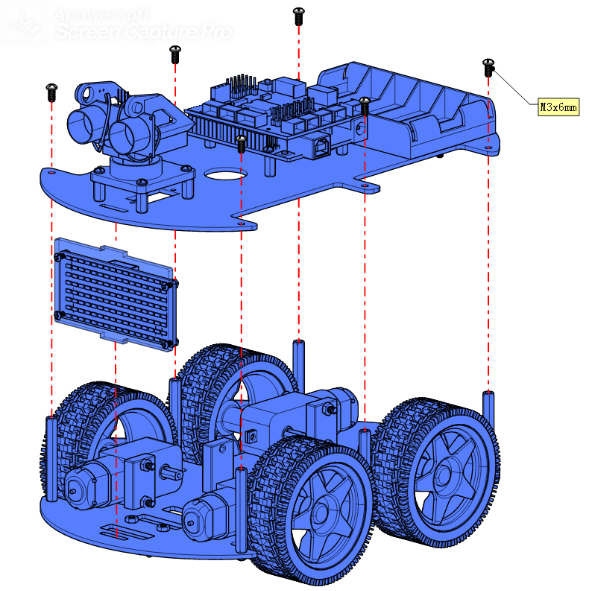
1.2. Diagramma di installazione.
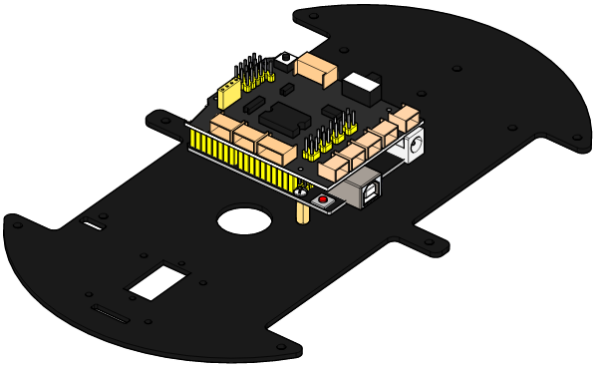
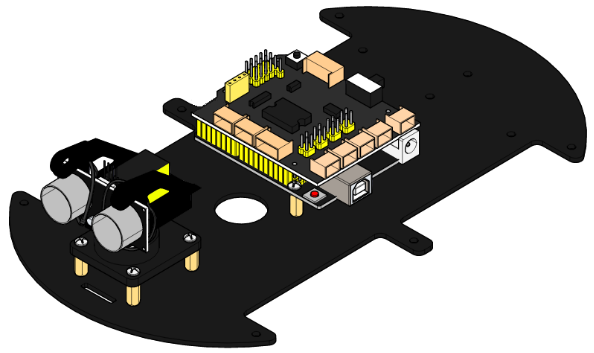
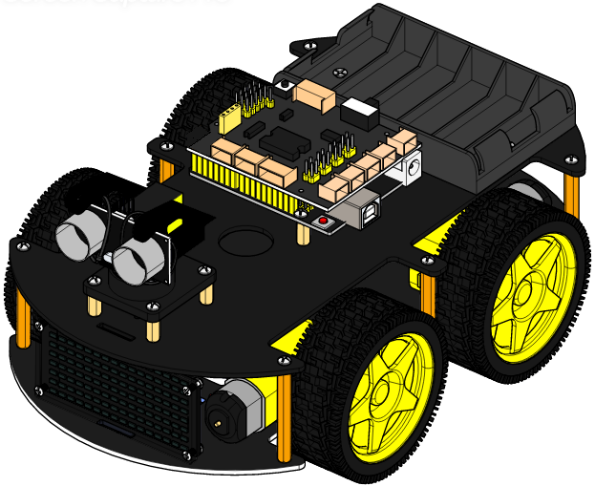
1.3. Prototipo.
parte 2
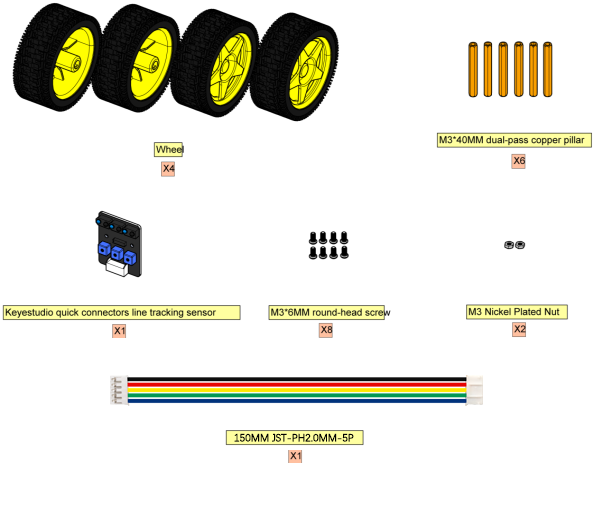
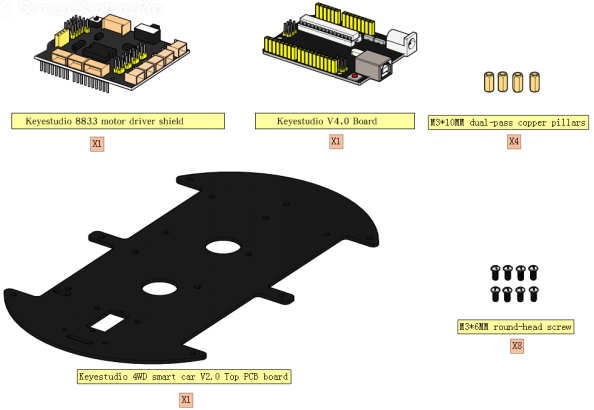
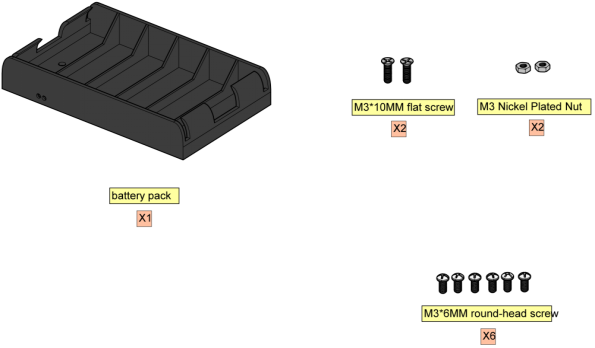
2.1. Componenti necessari.
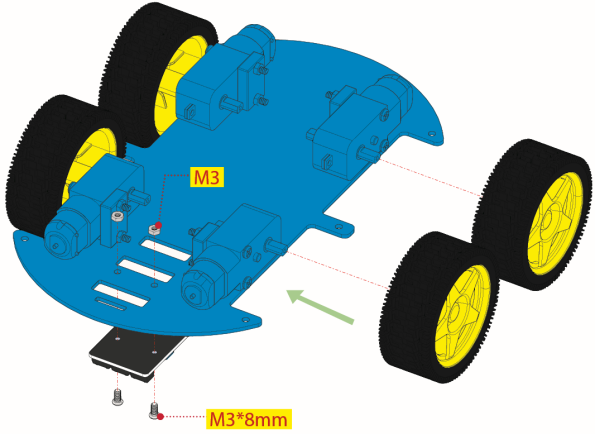
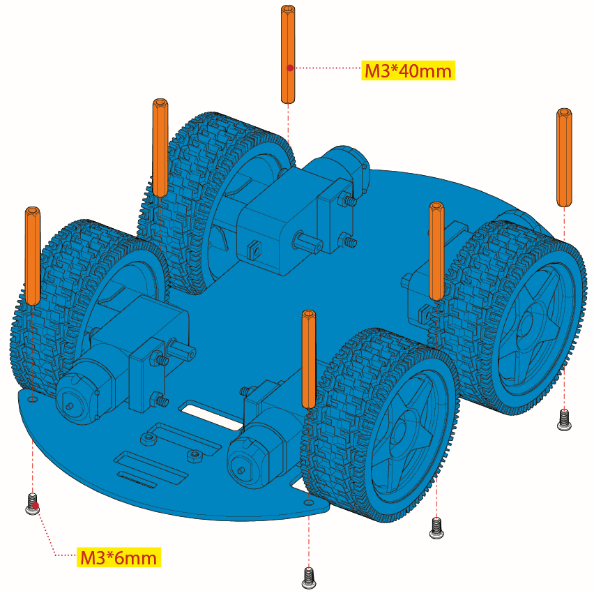
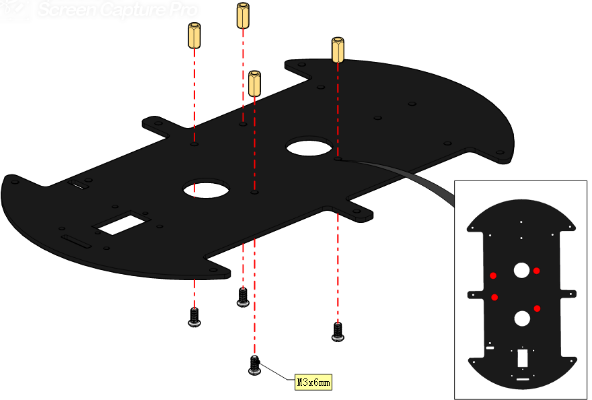
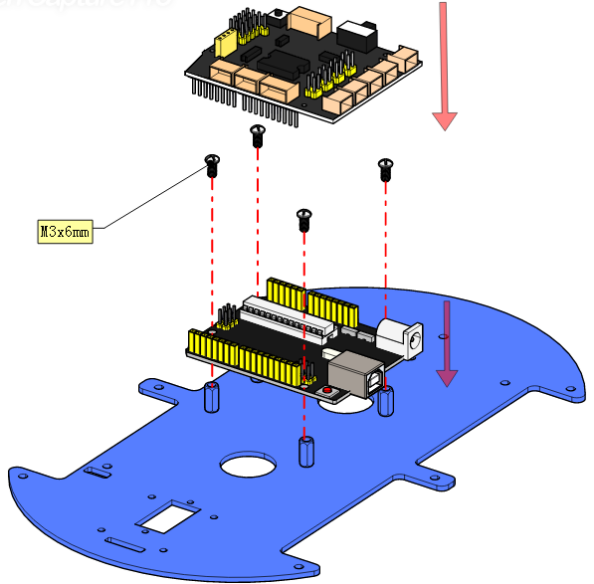
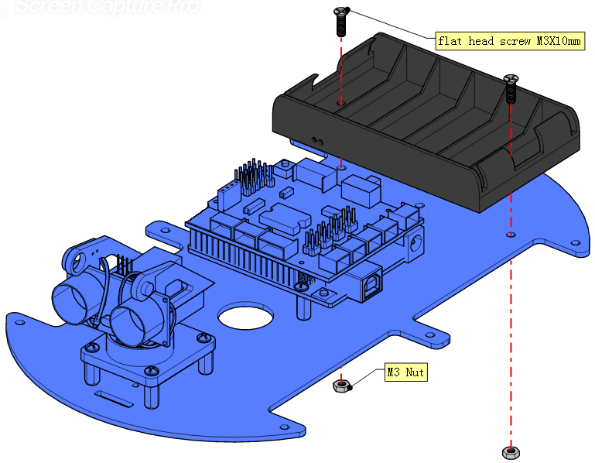
2.2. Diagramma di installazione.
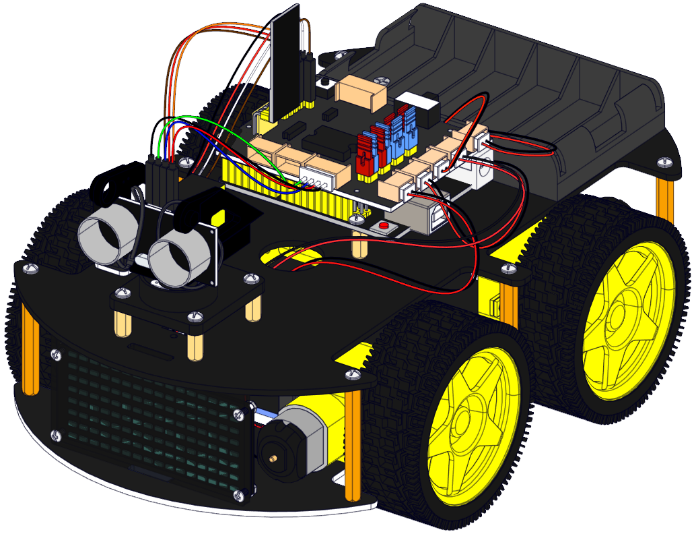
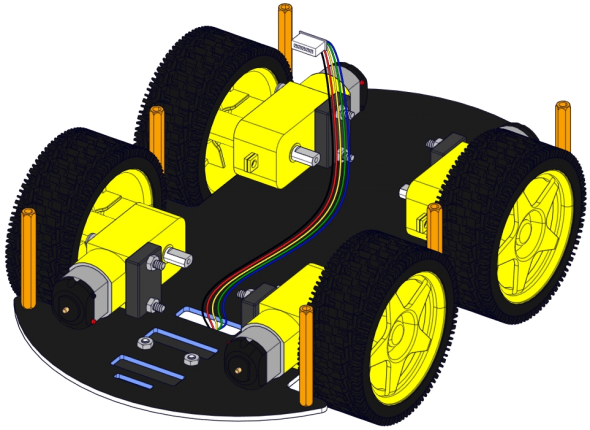
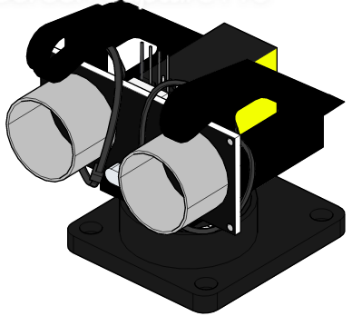
2.3. Prototipo.
parte 3
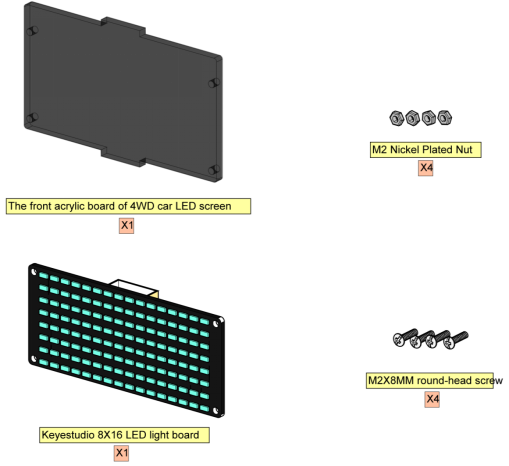
3.1. Componenti necessari.

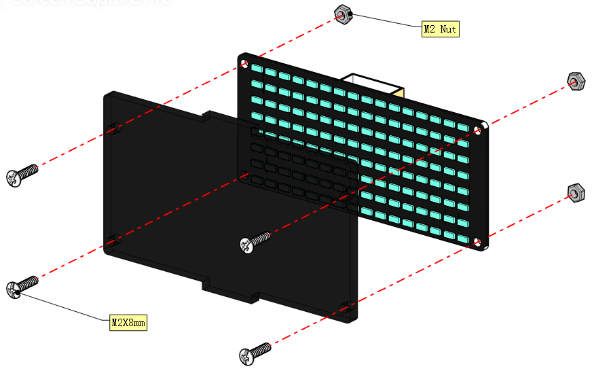
3.2. Diagramma di installazione.
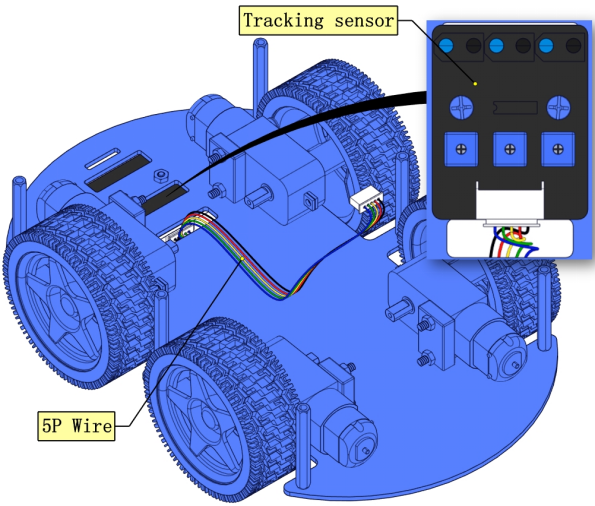
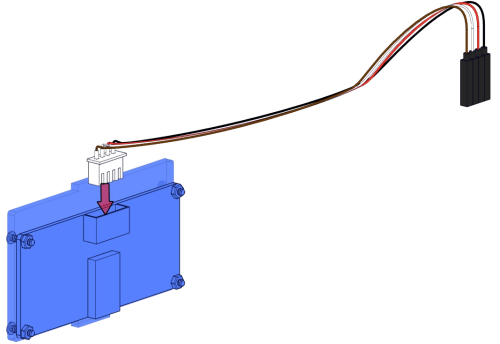
3.3. Collegamento fili.
3.4. Prototipo.
parte 4
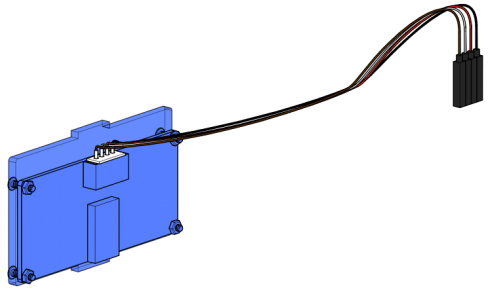
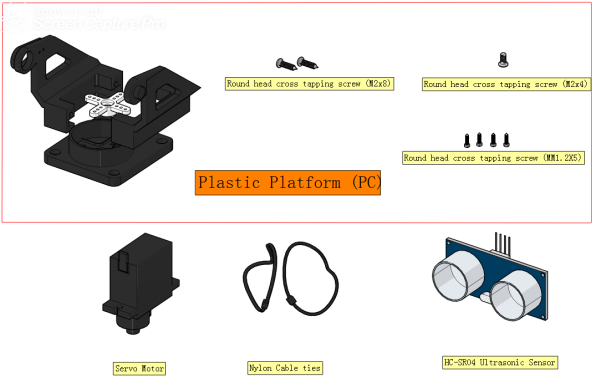
4.1. Componenti necessari.
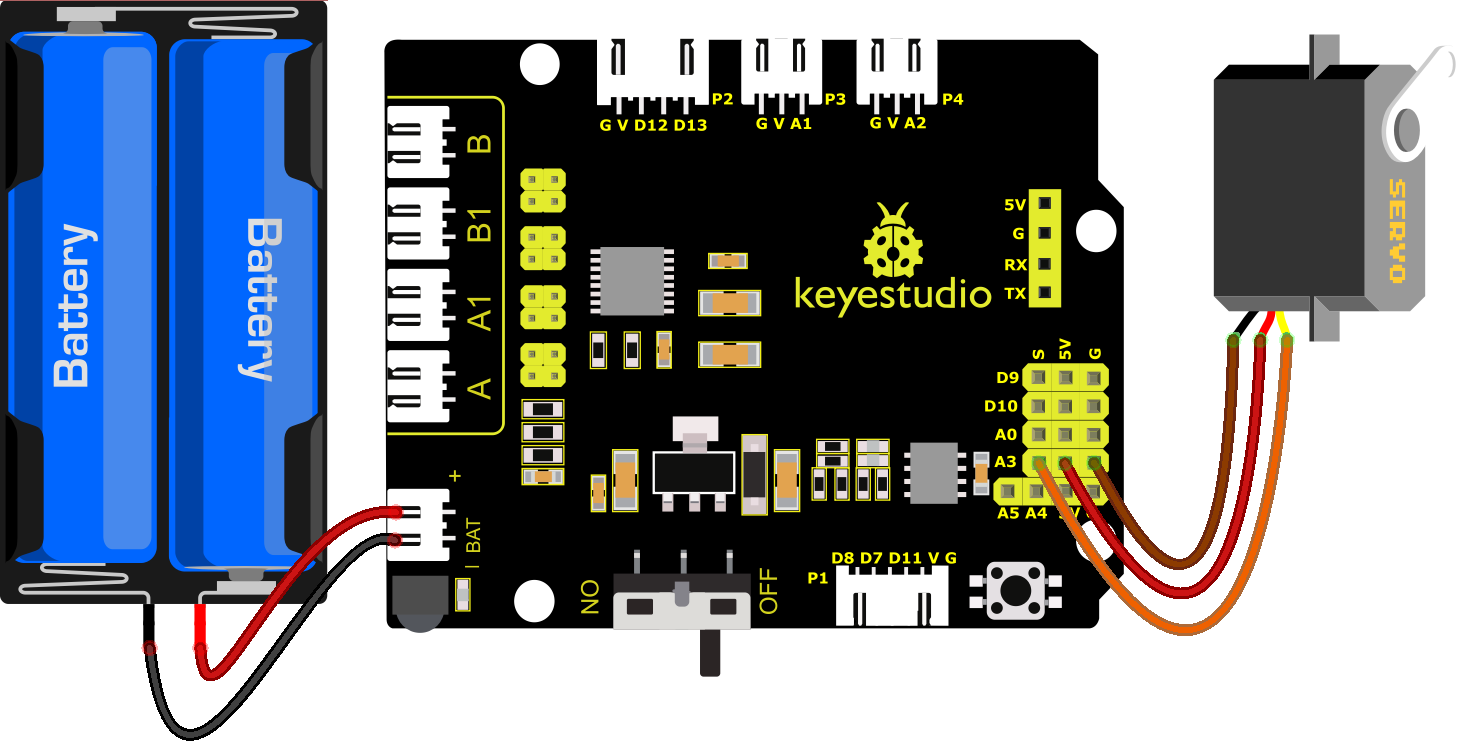
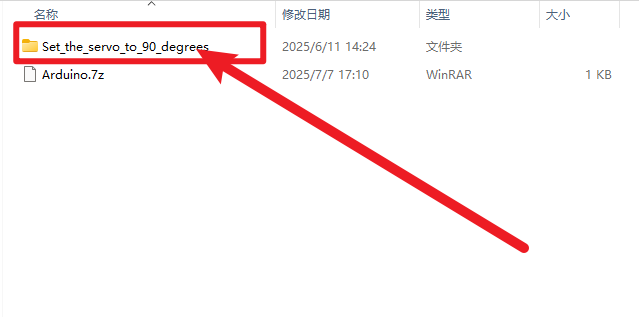
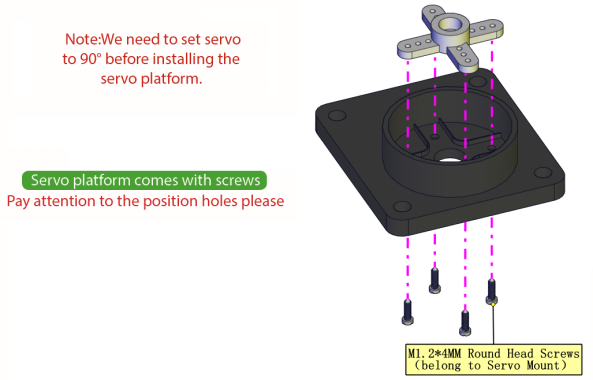
4.2. Ruotare il servo a 90 gradi.

Per regolare il codice del servo, selezionarlo in base al corso.
1.**Arduino:**Scarica il file codice: Arduino
2.**Kidsblock:**Scarica il file codice: Kidsblock

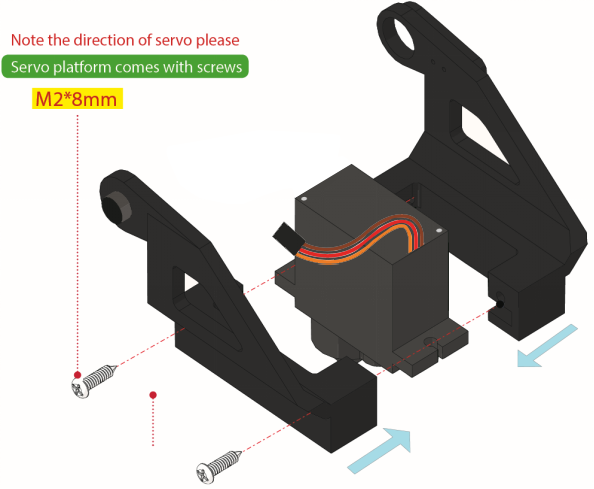
4.3. Diagramma di installazione.
4.4. Prototipo.
parte 5
5.1. Componenti necessari.
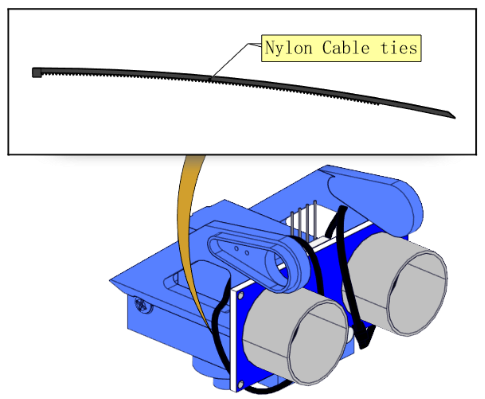
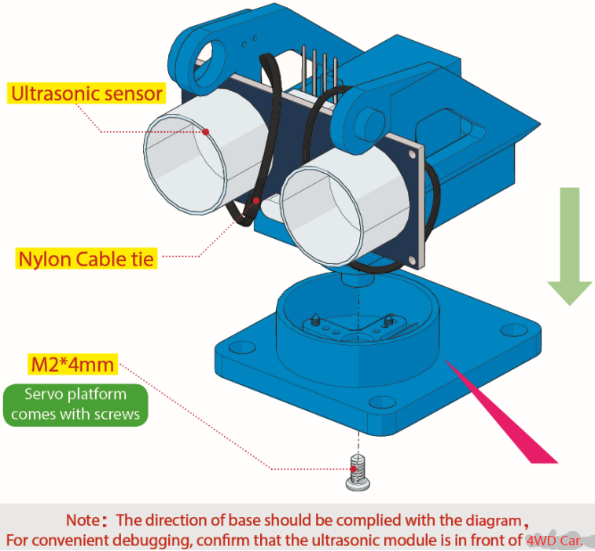
5.2. Diagramma di installazione.
5.3. Prototipo.
parte 6
6.1. Componenti necessari.
6.2. Diagramma di installazione.
6.3. Prototipo.
parte 7
7.1. Componenti necessari.
7.2. Diagramma di installazione.
7.3. Prototipo.
parte 8
8.1. Diagramma di cablaggio.
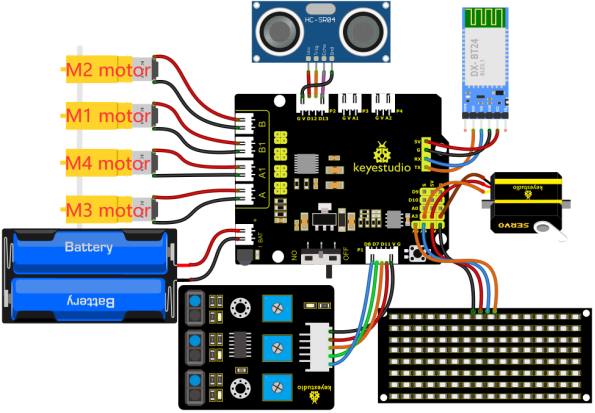
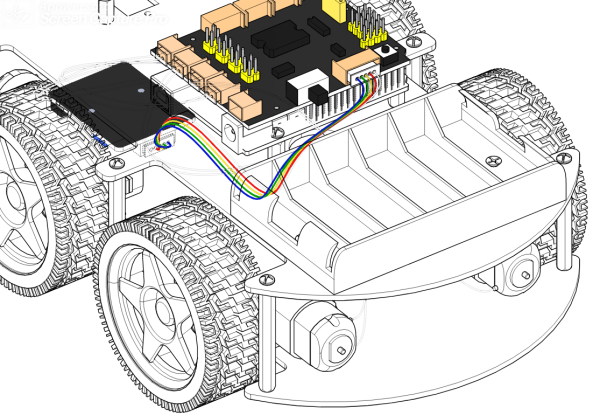
8.2. Il motore M2 è collegato all’interfaccia B, il motore M3 è collegato all’interfaccia A.
8.3. Il motore M1 è collegato all’interfaccia B1, il motore M4 è collegato all’interfaccia A1.
8.4. Cablaggio del sensore di tracciamento linea a 3 canali.
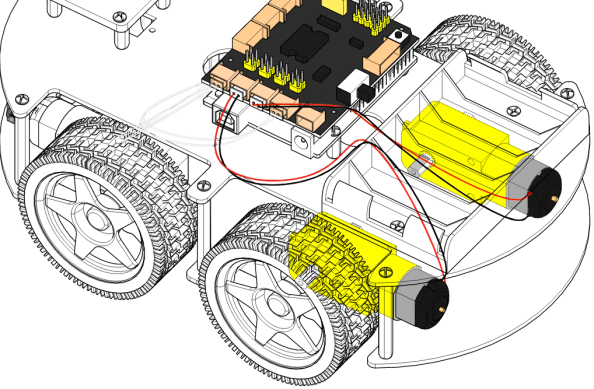
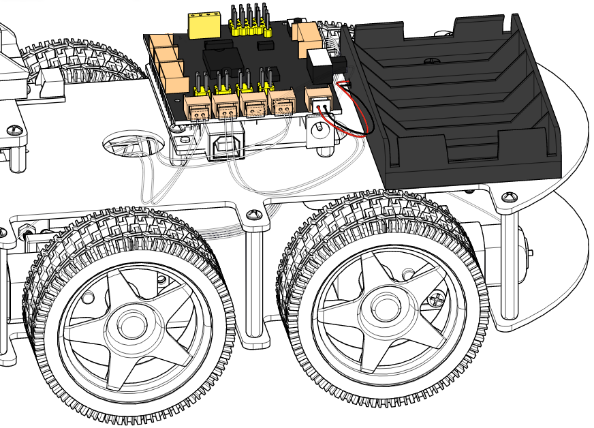
8.5. L’alimentazione è collegata a BAT.
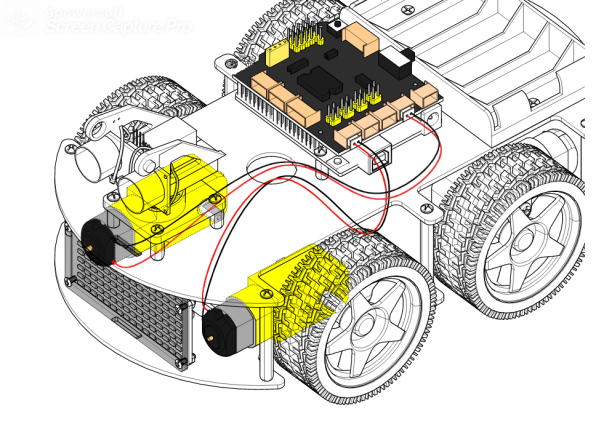
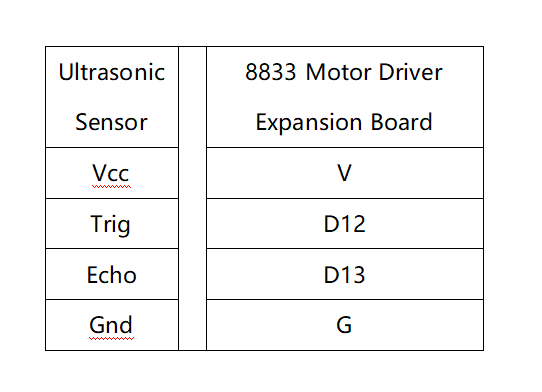
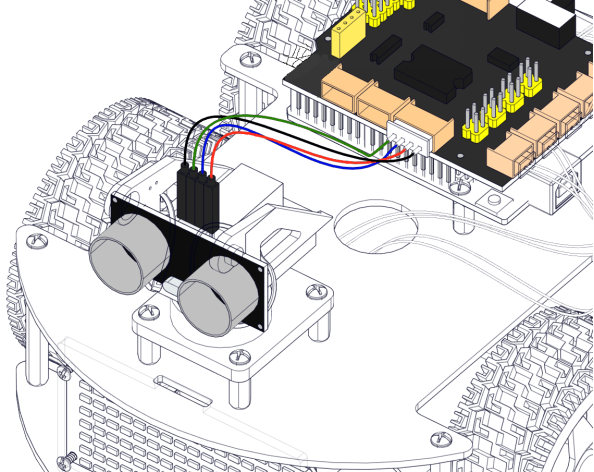
8.6. Cablaggio del sensore ad ultrasuoni.
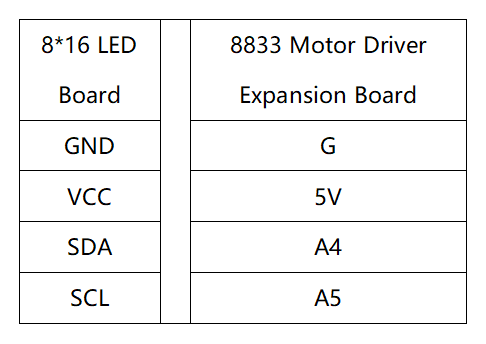
8.7. Cablaggio della scheda LED 8*16.
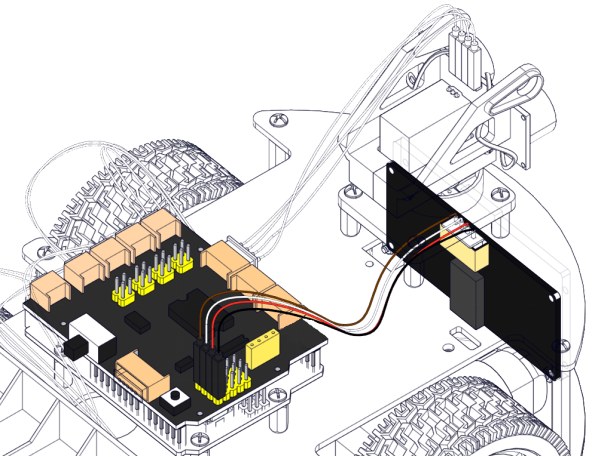
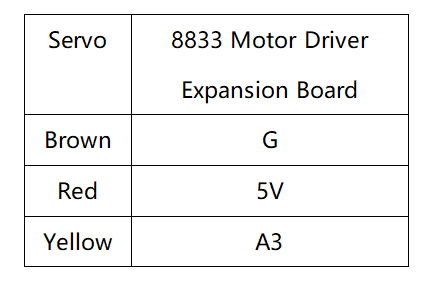
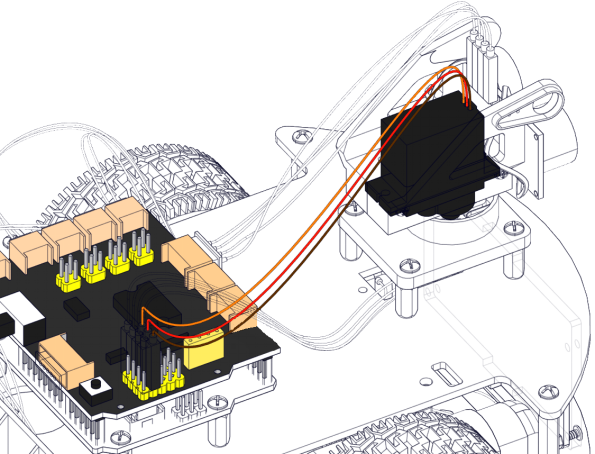
8.8. Cablaggio del servo.
8.9. Inserire il modulo Bluetooth e i ponticelli.
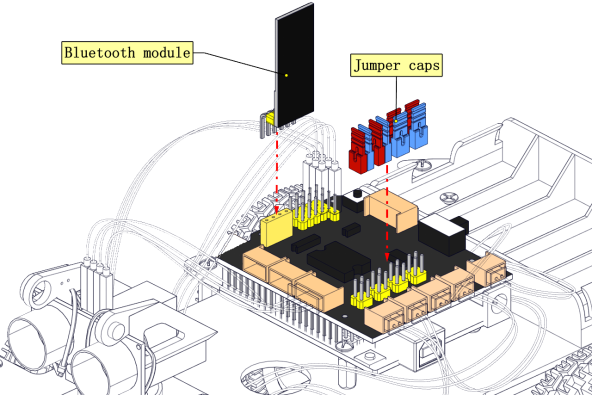
Nota: Prima di caricare il codice di test, è necessario rimuovere il modulo Bluetooth, altrimenti il caricamento del codice fallirà. Collegare il modulo Bluetooth dopo aver caricato correttamente il codice.
8.10. Prototipo completo.