Project 14 IR Afstandsbediening Smart Car
1.Beschrijving
In dit project maken we een IR afstandsbediening smart car en drukken we op de knop van de IR afstandsbediening om de auto te laten bewegen.
2.Stroomschema
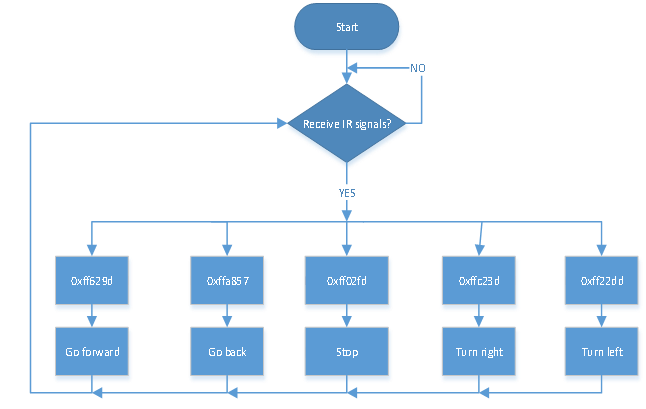
De specifieke logica van de IR afstandsbediening smart car wordt hieronder weergegeven:
Initiële setup |
LED-board toont glimlachend gezicht |
|
|---|---|---|
Afstandsbediening |
Sleutelwaarde |
Sleutelstatus |
|
FF629D |
Vooruit8*8 LED-board toont voorwaarts icoon |
|
FFA857 |
Achteruit8*8 LED-board toont achterwaarts icoon |
|
FF22DD |
Draai naar links8*8 LED-board toont links icoon |
|
FFC23D |
Draai naar rechts8*8 LED-board toont rechts icoon |
|
FF02FD |
Stop8*8 LED-board toont “STOP” |





3.Aansluitschema
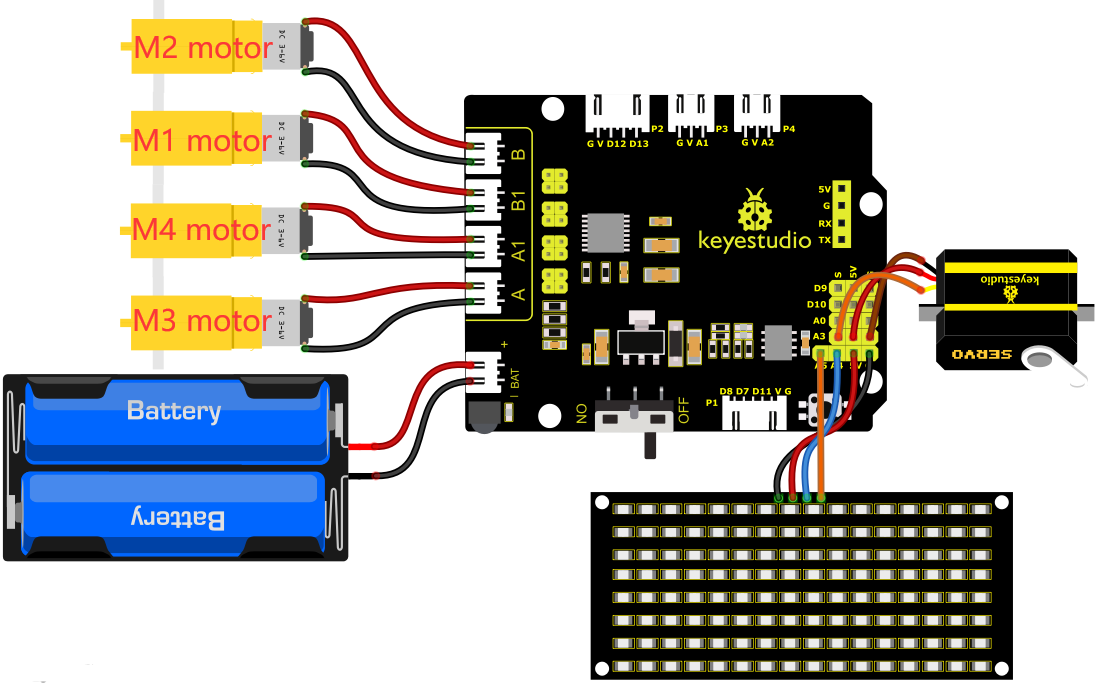
1). GND, VCC, SDA en SCL van het 8*8 LED-board module zijn verbonden met G (GND), V (VCC), A4 en A5 van de uitbreidingskaart.
2). Omdat de IR-ontvanger geïntegreerd is op de 8833 motor Shield, is extra bedrading niet nodig. De pinnen van de IR-ontvanger op de 8833 kaart zijn respectievelijk G (GND), V (VCC) en D3.
3). De servo is verbonden met G, V en A3. De bruine draad is aangesloten op Gnd (G), de rode draad op 5V (V) en de oranje draad op A3.
4). De voeding is aangesloten op de BAT-poort
4.Testcode
//*******************************************************************************
/*
keyestudio 4wd BT Car
les 14
IR afstandsbediening Auto
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Stel de klokpin in op A5
#define SDA_Pin A4 //Stel de datapin in op A4
//Array, gebruikt om de gegevens van het patroon op te slaan, kan zelf berekend worden of verkregen via de modulus tool
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
#include <Arduino.h>
#include <IRremote.h>//functie bibliotheek van IR afstandsbediening
int RECV_PIN = 3;//stel de pin van IR ontvanger in op D3
IRrecv irrecv(RECV_PIN);
long irr_val;
decode_results results;
int left_ctrl = 2;//definieer de richtingsbesturingspinnen van motor groep B
int left_pwm = 5;//definieer de PWM besturingspinnen van motor groep B
int right_ctrl = 4;//definieer de richtingsbesturingspinnen van motor groep A
int right_pwm = 6;//definieer de PWM besturingspinnen van motor groep A
#include <Servo.h>
Servo servo_A3;//stel de pin van servo in op A3
unsigned char data_line = 0;
unsigned char delay_count = 0;
void setup() {
Serial.begin(9600);//
// Voor het geval de interrupt driver crasht bij het opstarten, geef een aanwijzing
// aan de gebruiker wat er aan de hand is.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // Start de ontvanger
Serial.println("Enabled IRin");
pinMode(left_ctrl,OUTPUT);//stel de richtingsbesturingspinnen van groep B motor in op OUTPUT
pinMode(left_pwm,OUTPUT);//stel de PWM-besturingspinnen van groep B motor in op OUTPUT
pinMode(right_ctrl,OUTPUT);//stel de richtingsbesturingspinnen van groep A motor in op OUTPUT
pinMode(right_pwm,OUTPUT);//stel de PWM-besturingspinnen van groep A motor in op OUTPUT
servo_A3.attach(A3);
servo_A3.write(90);//de hoek van de servo is 90 graden
delay(300);
pinMode(SCL_Pin,OUTPUT);// Stel de klokpin in op output
pinMode(SDA_Pin,OUTPUT);//Stel de datapin in op output
matrix_display(clear);
matrix_display(start01); //toon start01 expressiepatroon
}
void loop()
{
if (irrecv.decode(&results))
{
irr_val = results.value;
Serial.println(irr_val, HEX);//serieel print de gelezen IR afstandsbedieningssignalen
switch(irr_val)
{
case 0xFF629D : car_front(); //Ontvang 0xFF629D, de auto gaat vooruit
matrix_display(clear);
matrix_display(front);
break;
case 0xFFA857 : car_back(); //Ontvang 0xFFA857, de auto gaat achteruit
matrix_display(clear);
matrix_display(back);
break;
case 0xFF22DD : car_left(); //Ontvang 0xFF22DD, de auto draait naar links
matrix_display(clear);
matrix_display(left);
break;
case 0xFFC23D : car_right();//Ontvang 0xFFC23D, de auto draait naar rechts
matrix_display(clear);
matrix_display(right);
break;
case 0xFF02FD : car_Stop();//Ontvang 0xFF02FD, de auto stopt
matrix_display(clear);
matrix_display(STOP01);
break;
}
irrecv.resume(); // Ontvang de volgende waarde
}
}
void car_front()//definieer de status van vooruit rijden
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,105);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,105);
}
void car_back()//definieer de status van achteruit rijden
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,150);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,150);
}
void car_left()//stel de status van linksaf draaien in
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//stel de status van rechtsaf draaien in
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//definieer de status van stoppen
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
//deze functie wordt gebruikt voor dot matrix display
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //de functie die de startconditie van datatransfer aanroept
IIC_send(0xc0); //selecteer adres
for (int i = 0; i < 16; i++) //de patroon data is 16 bytes
{
IIC_send(matrix_value[i]); //Zend de data van het patroon
}
IIC_end(); //Beëindig de overdracht van patroon data
IIC_start();
IIC_send(0x8A); //Display controle, selecteer 4/16 pulsbreedte
IIC_end();
}
//Voorwaarden waaronder dataoverdracht begint
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Geeft het einde van dataoverdracht aan
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//zend data
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Elke byte heeft 8 bits en wordt bit voor bit gecontroleerd beginnend bij het laagste niveau
{
if (send_data & mask) { //Stelt de hoge en lage niveaus van SDA_Pin in afhankelijk van of elk bit van de byte een 1 of een 0 is
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Trek de klokpin SCL_Pin hoog om de dataoverdracht te stoppen
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //trek de klokpin SCL_Pin laag om het SIGNaal van SDA te veranderen
}
}
//*******************************************************************************
5. Testresultaat
Na het succesvol uploaden van de code naar de V4.0 board, verbind de bedrading volgens het bedradingsschema, zet de externe voeding aan en zet vervolgens de DIP-schakelaar op ON. Daarna kunnen we de IR-afstandsbediening gebruiken om de auto te laten bewegen en zal het 8X16 LED-bord het overeenkomstige statuspatroon weergeven.