Project 17 Multi-purpose Bluetooth Smart Car

1.Beschrijving
In eerdere projecten voert de auto slechts één enkele functie uit. In deze les zullen we echter al zijn functies integreren via Bluetooth.
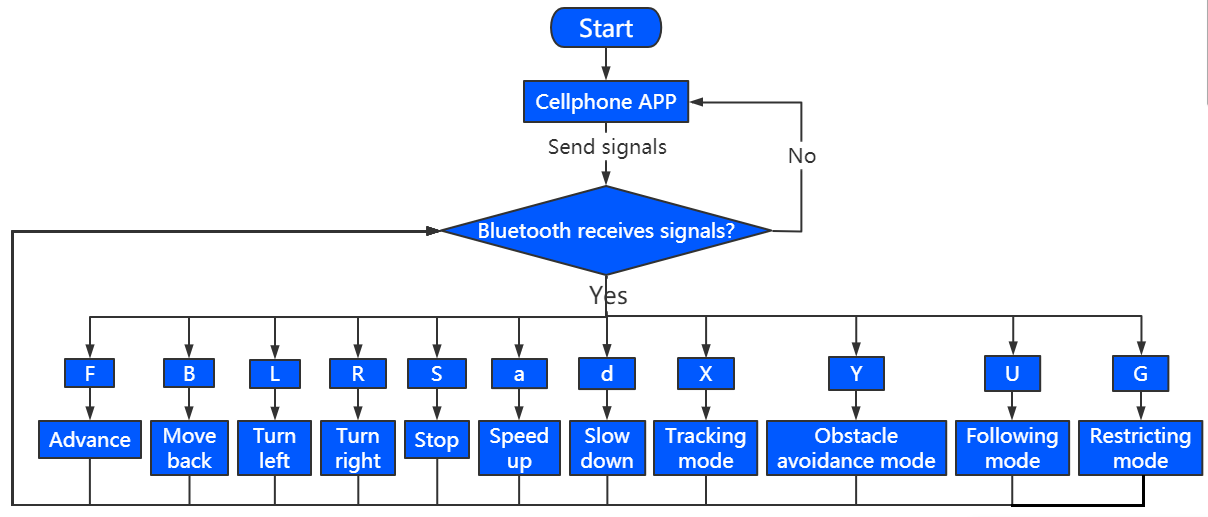
2.Stroomschema
3.Aansluitschema
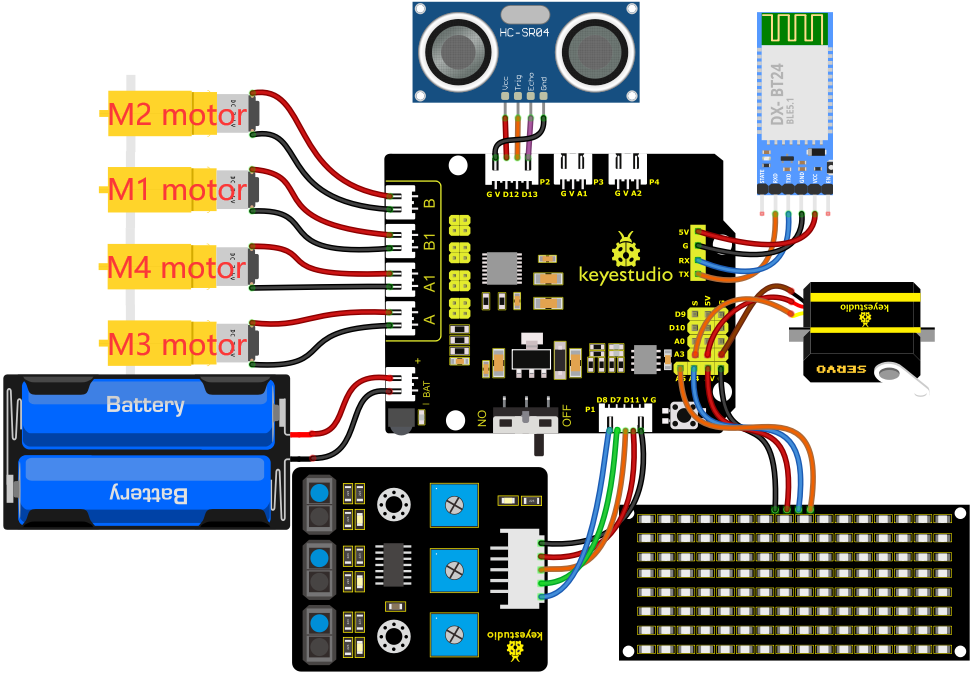
1). GND, VCC, SDA en SCL van het 8*8 LED-bord zijn verbonden met G (GND), V (VCC), A4 en A5 van het uitbreidingsbord.
2). De RXD, TXD, GND en VCC van de Bluetooth-module zijn respectievelijk verbonden met TX, RX, G en 5V op de 8833 motor Shield, terwijl de STATE- en BRK-pinnen van de Bluetooth-module niet hoeven te worden aangesloten.
3). De servo is verbonden met G, V en A3. De bruine draad is verbonden met Gnd (G), de rode draad is verbonden met 5V (V) en de oranje draad is verbonden met A3.
4). G, V, S1, S2 en S3 van de lijnvolgsensor zijn verbonden met G (GND), V (VCC), D11, D7 en D8 van het sensor uitbreidingsbord.
5). VCC, Trig, Echo en Gnd van de ultrasone sensor zijn verbonden met 5V (V), D12 (S), D13 (S) en Gnd (G).
6). De voeding is verbonden met de BAT-poort.
4.Testcode
Opmerking: Verwijder de Bluetooth-module voordat je de testcode uploadt, anders kan de code niet worden geüpload. Verbind de Bluetooth-module pas nadat de code succesvol is geüpload.
//*******************************************************************************
/*
keyestudio 4wd BT Car
les 17
Bluetooth multifunctionele auto
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Stel de klokpin in op A5
#define SDA_Pin A4 //Stel de datapin in op A4
//Array, gebruikt om de gegevens van het patroon op te slaan, kan zelf worden berekend of verkregen via de modulus tool
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char speed_a[] =
{0x00,0x40,0x20,0x10,0x08,0x04,0x02,0xff,0x02,0x04,0x08,0x10,0x20,0x40,0x00,0x00};
unsigned char speed_d[] =
{0x00,0x02,0x04,0x08,0x10,0x20,0x40,0xff,0x40,0x20,0x10,0x08,0x04,0x02,0x00,0x00};
int left_ctrl = 2;//definieer de richtingsbesturingspinnen van motor groep B
int left_pwm = 5;//definieer de PWM-besturingspinnen van motor groep B
int right_ctrl = 4;//definieer de richtingsbesturingspinnen van motor groep A
int right_pwm = 6;//definieer de PWM-besturingspinnen van motor groep A
int speeds = 150; //Stel de beginsnelheid in op 150
const int servopin = A3;//stel de pin van de servo in op A3
int L_pin = 11; //definieer de linker lijnvolgsensor pin als D11
int M_pin = 7; //definieer de middelste lijnvolgsensor pin als D7
int R_pin = 8; //definieer de rechter lijnvolgsensor pin als D8
int L_val, M_val, R_val;
int trigPin = 12; //TRIG pin verbonden met D12
int echoPin = 13; //ECHO pin verbonden met D13
int distance, distance_l, distance_r;
char BLE_val;
void setup() {
Serial.begin(9600);//Stel baudrate in op 9600
pinMode(left_ctrl,OUTPUT);//stel richtingbesturingspinnen van groep B motor in op OUTPUT
pinMode(left_pwm,OUTPUT);//stel PWM-besturingspinnen van groep B motor in op OUTPUT
pinMode(right_ctrl,OUTPUT);//stel richtingbesturingspinnen van groep A motor in op OUTPUT
pinMode(right_pwm,OUTPUT);//stel PWM-besturingspinnen van groep A motor in op OUTPUT
servopulse(servopin,90);//de hoek van de servo is 90 graden
delay(300);
pinMode(L_pin, INPUT); //Tracking sensorpinnen zijn geconfigureerd voor inputmodus
pinMode(M_pin, INPUT);
pinMode(R_pin, INPUT);
pinMode(trigPin, OUTPUT); //definieer TRIG als outputmodus
pinMode(echoPin, INPUT); //definieer ECHO als inputmodus
pinMode(SCL_Pin,OUTPUT);// Stel de klokpin in op output
pinMode(SDA_Pin,OUTPUT);//Stel de datapin in op output
matrix_display(clear);
matrix_display(start01); //toon start01 expressiepatroon
}
void loop() {
if(Serial.available()>0) {
BLE_val = Serial.read();
Serial.println(BLE_val);
}
switch(BLE_val)
{
case 'F' : car_front();
matrix_display(clear);
matrix_display(front);
break;
case 'B' : car_back();
matrix_display(clear);
matrix_display(back);
break;
case 'L' : car_left();
matrix_display(clear);
matrix_display(left);
break;
case 'R' : car_right();
matrix_display(clear);
matrix_display(right);
break;
case 'S' : car_Stop();
matrix_display(clear);
matrix_display(STOP01);
break;
case 'a' : speeds_a();
matrix_display(clear);
matrix_display(speed_a);
break;
case 'd' : speeds_d();
matrix_display(clear);
matrix_display(speed_d);
break;
case 'U': follow(); //Ontvang ‘U’, ga naar volgmodus
break;
case 'Y': avoid(); //Ontvang ‘Y’, ga naar obstakelvermijdingsmodus
break;
case 'G': confinement(); //Ontvang ‘G’, ga naar begrenzingsmodus
break;
case 'X': tracking(); //Ontvang ‘X’, ga naar volgmodus
break;
}
}
void car_front()//definieer de toestand van vooruit rijden
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,(255-speeds));
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,(255-speeds));
}
void car_back()//definieer de toestand van achteruit rijden
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,speeds);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,speeds);
}
void car_left()//stel de toestand van linksaf slaan in
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, speeds);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, (255-speeds));
}
void car_right()//stel de toestand van rechtsaf slaan in
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, (255-speeds));
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, speeds);
}
void car_Stop()//definieer de toestand van stoppen
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void speeds_a() { //functie voor snelheidsverhoging
while (1) {
Serial.println(speeds); //toon snelheidsinformatie
if (speeds < 255) { //tot 255
matrix_display(clear);
matrix_display(speed_a);
speeds++;
delay(10); //pas de snelheid van de toename aan
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Ontvang 'S', de auto stopt met versnellen
break;
}
}
void speeds_d() { //functie voor snelheidsvermindering
while (1) {
Serial.println(speeds); //toon snelheidsinformatie
if (speeds > 0) { //tot 0
matrix_display(clear);
matrix_display(speed_d);
speeds--;
delay(10); //pas de snelheid van de vertraging aan
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Ontvang 'S', de auto stopt met vertragen
break;
}
}
int get_distance() {
int distance = 0;
digitalWrite(trigPin, LOW); // stuur puls via Trig/Pin, activeer HC-SR04 afstandsmeting, zodat het ultrasone signaalinterface laag niveau 2μs uitzendt
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // maak ultrasoon signaalinterface hoog niveau 10μs, hier minimaal 10μs
delayMicroseconds(10);
digitalWrite(trigPin, LOW); // houd het ultrasone signaalinterface laag niveau
distance = pulseIn(echoPin, HIGH) / 58; // lees de pulstijd en zet de pulstijd om naar afstand (eenheid: cm)
Serial.println(distance); // output afstandswaarde
return distance;
}
void follow() {
servopulse(servopin,90);
delay(200);
int follow_flag = 1;
while (follow_flag) {
distance = get_distance(); //roep de afstandsmeetfunctie aan
if (distance < 8 ) {//Als de afstand minder is dan 8
car_back();//rijdt de auto achteruit
matrix_display(clear);
matrix_display(back);
}
else if (distance >= 8 && distance < 13) { //Als de afstand groter dan of gelijk aan 8 is, maar minder dan 13
car_Stop();//stoppen
matrix_display(clear);
matrix_display(STOP01);
}
else if (distance >= 13 && distance <= 35 ) { //Als de afstand groter dan of gelijk aan 13 is, maar minder dan of gelijk aan 35
car_front();//rijdt de auto vooruit
matrix_display(clear);
matrix_display(front);
}
else {//Als geen van bovenstaande
car_Stop();//stoppen
matrix_display(clear);
matrix_display(STOP01);
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Wanneer S wordt ontvangen, stopt de auto
follow_flag = 0;
car_Stop();
}
}
}
void avoid() {
int avoid_flag = 1;
while (avoid_flag) {
distance = get_distance(); //roep de afstandsmeetfunctie aan
if (distance > 0 && distance < 20) { //Als de afstand minder is dan 20 en groter dan 0
car_Stop();//stoppen
matrix_display(clear);
matrix_display(STOP01); //de dot matrix toont een stop patroon
delay(1000);
servopulse(servopin,160); //breng het stuurmechanisme over 180 graden
delay(500);
distance_l = get_distance(); //meet de linker afstand
delay(100);
servopulse(servopin,20); //draai het stuurmechanisme naar 0 graden
delay(500);
distance_r = get_distance(); //meet de rechter afstand
delay(100);
if (distance_l > distance_r) { //vergelijk de afstanden, als links groter is dan rechts
car_left(); //de auto draait naar links
matrix_display(clear);
matrix_display(left); //de dot matrix toont een links patroon
servopulse(servopin,90);//het stuurmechanisme keert terug naar 90 graden
delay(700);
matrix_display(clear);
matrix_display(front); //de dot matrix toont een vooruit patroon
}
else { //Anders als rechts groter is dan links
car_right();//de auto draait naar rechts
matrix_display(clear);
matrix_display(right); //de dot matrix toont een rechts patroon
servopulse(servopin,90);//het stuurmechanisme keert terug naar 90 graden
delay(700);
matrix_display(clear);
matrix_display(front); //de dot matrix toont een vooruit patroon
}
}
else { //Wanneer de afstand voor minder dan of gelijk aan 10cm is
car_front();//rijdt de auto vooruit
matrix_display(clear);
matrix_display(front); //de dot matrix toont een vooruit patroon
}
BLE_val = Serial.read();
if (BLE_val == 'S') {//Wanneer S wordt ontvangen, stopt de auto
avoid_flag = 0;
car_Stop();
}
}
}
void confinement() {
int confinement_flag = 1;
while (confinement_flag) {
L_val = digitalRead(L_pin); //lees de waarde van de linkersensor
M_val = digitalRead(M_pin); //lees de waarde van de middensensor
R_val = digitalRead(R_pin); //lees de waarde van de rechtersensor
if ( L_val == 0 && M_val == 0 && R_val == 0 ) { //de auto gaat vooruit wanneer er geen zwarte lijn wordt gedetecteerd
car_front();
}
else { //Anders, als een van de volg sensoren een zwarte lijn detecteert, gaat de auto achteruit en draait dan naar links
car_back();
delay(500);
car_left();
delay(800);
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Wanneer S wordt ontvangen, stopt de auto
confinement_flag = 0;
car_Stop();
}
}
}
void tracking() {
int track_flag = 1;
while (track_flag) {
L_val = digitalRead(L_pin); //lees de waarde van de linkersensor
M_val = digitalRead(M_pin); //lees de waarde van de middensensor
R_val = digitalRead(R_pin); //lees de waarde van de rechtersensor
if (M_val == 1) { //Zwarte lijn gedetecteerd in het midden
if (L_val == 1 && R_val == 0) { //Als een zwarte lijn aan de linkerkant wordt gedetecteerd, maar niet aan de rechterkant, draai dan naar links
car_left();
}
else if (L_val == 0 && R_val == 1) { //Anders, als een zwarte lijn aan de rechterkant wordt gedetecteerd en niet aan de linkerkant, draai dan naar rechts
car_right();
}
else { //Anders gaat de auto vooruit
car_front();
}
}
else { //geen zwarte lijnen gedetecteerd in het midden
if (L_val == 1 && R_val == 0) { //Als een zwarte lijn aan de linkerkant wordt gedetecteerd, maar niet aan de rechterkant, draai dan naar links
car_right();
}
else if (L_val == 0 && R_val == 1) { //Anders, als een zwarte lijn aan de rechterkant wordt gedetecteerd en niet aan de linkerkant, draai dan naar rechts
car_right();;
}
else { //Anders, stop
car_Stop();
}
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Wanneer S wordt ontvangen, stopt de auto
track_flag = 0;
car_Stop();
}
}
}
void servopulse(int servopin,int myangle)//Stuurservo draaihoek
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//deze functie wordt gebruikt voor dot matrix display
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //de functie die de startconditie voor datatransfer aanroept
IIC_send(0xc0); //selecteer adres
for (int i = 0; i < 16; i++) //de patroongegevens zijn 16 bytes
{
IIC_send(matrix_value[i]); //Zend de gegevens van het patroon
}
IIC_end(); //Beëindig de overdracht van patroongegevens
IIC_start();
IIC_send(0x8A); //Displaycontrole, selecteer 4/16 pulsbreedte
IIC_end();
}
//Voorwaarden waaronder gegevensoverdracht begint
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Geeft het einde van de gegevensoverdracht aan
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//zend gegevens
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Elke byte heeft 8 bits en wordt bit voor bit gecontroleerd, beginnend bij het laagste niveau
{
if (send_data & mask) { //Stelt de hoge en lage niveaus van SDA_Pin in afhankelijk van of elk bit van de byte een 1 of een 0 is
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Trek de klokpin SCL_Pin hoog om de gegevensoverdracht te stoppen
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //trek de klokpin SCL_Pin laag om het SIGNaal van SDA te veranderen
}
}
//*******************************************************************************
5. Testresultaat
Na het succesvol uploaden van de code naar de V4.0 board, sluit de bedrading aan volgens het bedradingsschema, zet de externe voeding aan en zet vervolgens de DIP-schakelaar op AAN.
Nadat de Bluetooth-module is aangesloten op de APP en de mobiele APP succesvol is verbonden met de Bluetooth, kan de slimme auto worden bestuurd via de mobiele APP. We kunnen de bijbehorende functies bereiken door op de overeenkomstige knoppen op de mobiele APP te drukken.