Project 15 Bluetooth Control Smart Car

1.Beschrijving
We hebben de basiskennis van Bluetooth geleerd. In deze les gaan we een Bluetooth-gestuurde slimme auto maken. In dit project beschouwen we de mobiele telefoon als de zender (host) en de slimme auto die is verbonden met de BT24 Bluetooth-module (slave) als de ontvanger, en gebruiken we de mobiele APP om de slimme auto via Bluetooth te bedienen.
2.APP Bedieningsknoppen
Toets |
Functie |
|---|---|
|
Koppel DX-BT24 5.1 Bluetooth-module |
|
Verbreek Bluetooth-verbinding |


Bedieningskarakter |
Functie |
|
|---|---|---|
|
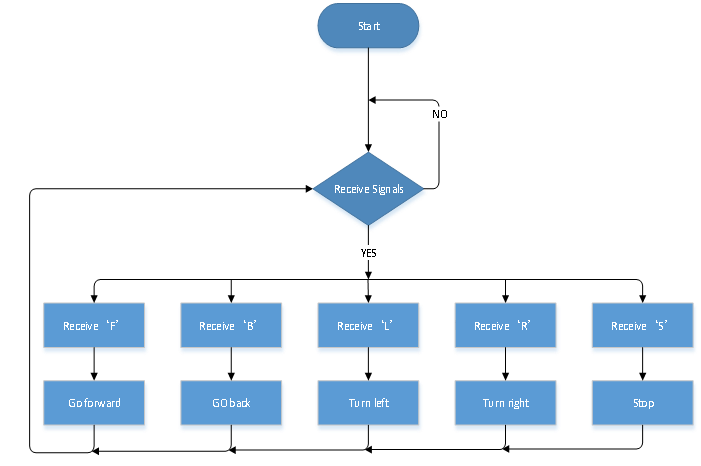
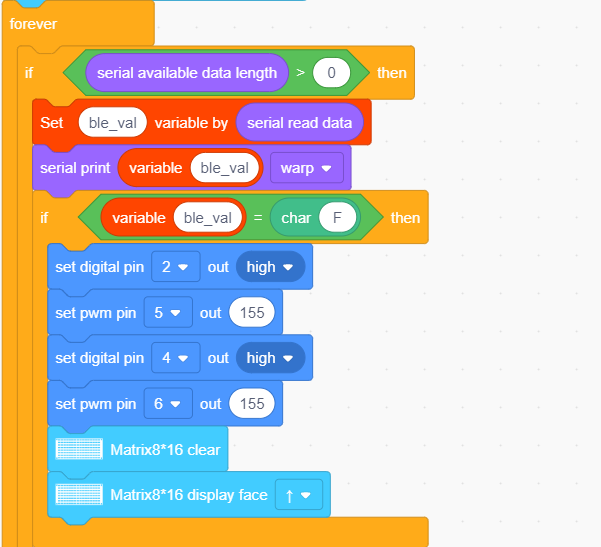
Druk: F |
Druk op de knop, de auto rijdt vooruit; |
|
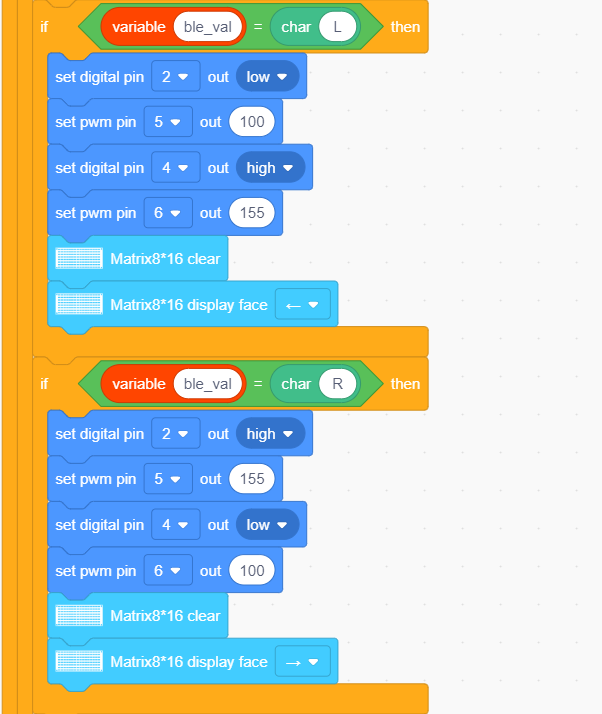
Druk: L |
Druk op de knop, de auto draait naar links; |
|
Druk: R |
Druk op de knop, de auto draait naar rechts; |
|
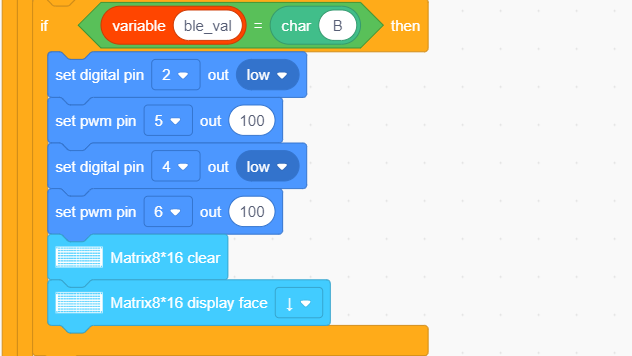
Druk: B |
Druk op de knop, de auto rijdt achteruit; |
|
Druk: “a” |
Klik om te versnellen (maximaal: 255) |
|
Druk: “d” |
Klik om te vertragen (minimaal: 0) |
|
Klik om de zwaartekracht- |
|
|
Klik om “X” te verzenden, |
Start lijnvolgfunctie; |
|
Klik om “Y” te verzenden, |
Start ultrasone vermijdingsfunctie; |
|
Klik om “U” te verzenden, |
Start ultrasone volgfunctie; |
|
Klik om “G” te verzenden, |
Start begrenzingsfunctie; |











3.Stroomschema
4.Aansluitschema
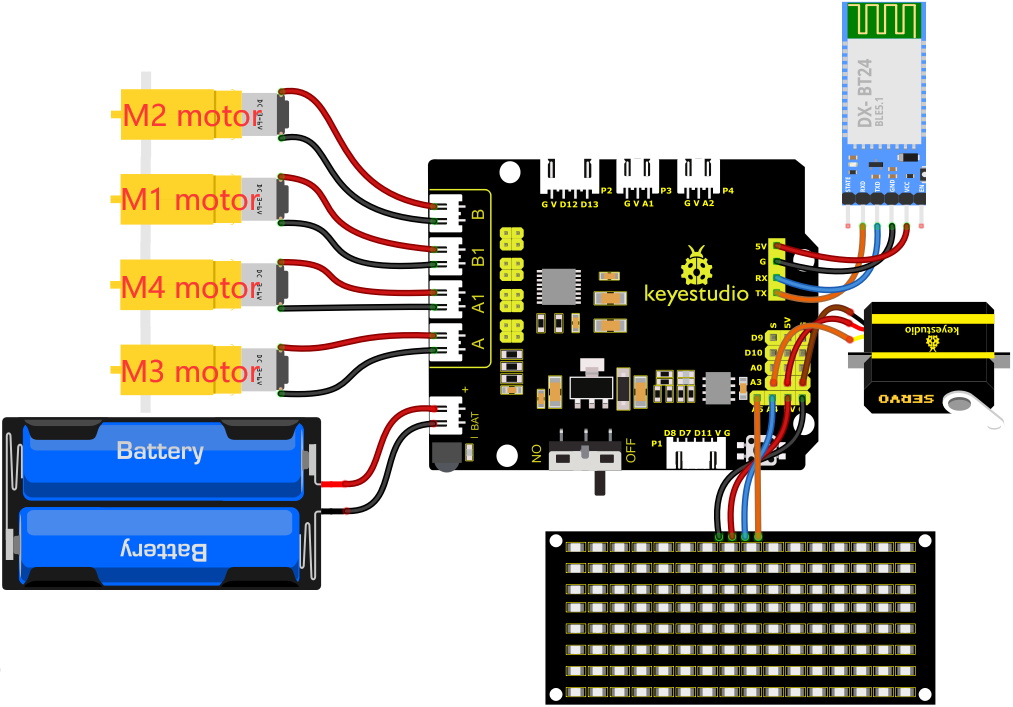
1). GND, VCC, SDA en SCL van het 8*8 LED-bord zijn verbonden met G (GND), V (VCC), A4 en A5 van het uitbreidingsbord.
2). De RXD, TXD, GND en VCC van de Bluetooth-module zijn respectievelijk verbonden met TX, RX, G en 5V op het 8833 motor driver uitbreidingsbord, terwijl de STATE- en BRK-pinnen van de Bluetooth-module niet hoeven te worden aangesloten.
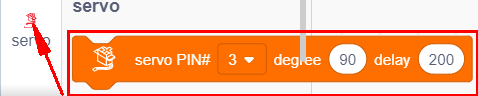
3). De servo is verbonden met G, V en A3. De bruine draad is aangesloten op Gnd (G), de rode draad is aangesloten op 5V (V) en de oranje draad is aangesloten op A3.
4). De voeding is aangesloten op de BAT-poort
5.Testcode
Voordat je de code schrijft, is het noodzakelijk om de bibliotheekbestanden van het 8x16 LED-bord en de servo te importeren. De specifieke stappen zijn als volgt:
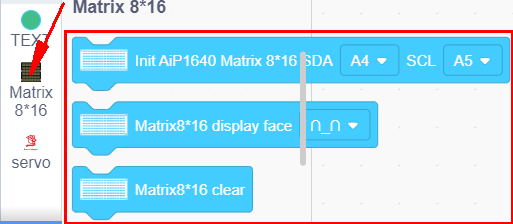
Klik op  om de extensiebibliotheekinterface van sensoren/modules/componenten te openen, zoek vervolgens naar de “Matrix 8*16 Aip1640” module
om de extensiebibliotheekinterface van sensoren/modules/componenten te openen, zoek vervolgens naar de “Matrix 8*16 Aip1640” module  en klik erop. Op deze manier verandert “Not loaded” in “loaded”, wat aangeeft dat de “Matrix 8*16 Aip1640” module succesvol is toegevoegd.
en klik erop. Op deze manier verandert “Not loaded” in “loaded”, wat aangeeft dat de “Matrix 8*16 Aip1640” module succesvol is toegevoegd.
Klik op  om terug te keren naar de code-editorinterface, de instructieblok van de toegevoegde “Matrix 8*16 Aip1640” module en “Servo” component is te zien in het modulegebied.
om terug te keren naar de code-editorinterface, de instructieblok van de toegevoegde “Matrix 8*16 Aip1640” module en “Servo” component is te zien in het modulegebied.
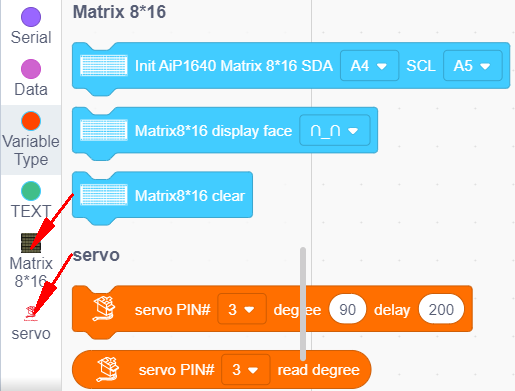
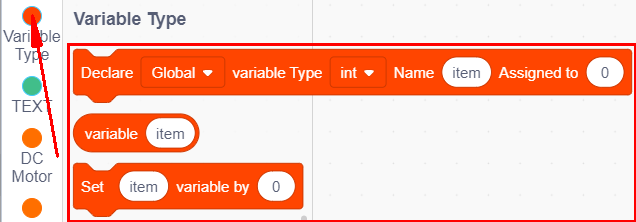
Je kunt blokken slepen om te bewerken. De onderstaande blokken zijn ter referentie.
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
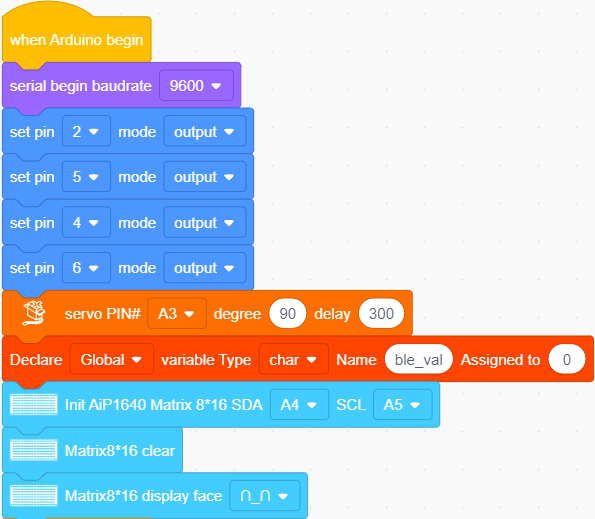
Volledige Testcode
Opmerking: Voordat je de testcode uploadt, moet je de Bluetooth-module verwijderen, anders zal het uploaden van de code mislukken. Verbind de Bluetooth-module pas nadat de code succesvol is geüpload.
6. Testresultaat
Nadat de code succesvol is geüpload naar de V4.0 board, verbind je de bedrading volgens het bedradingsschema, zet je de externe voeding aan en zet je de DIP-switch op ON.
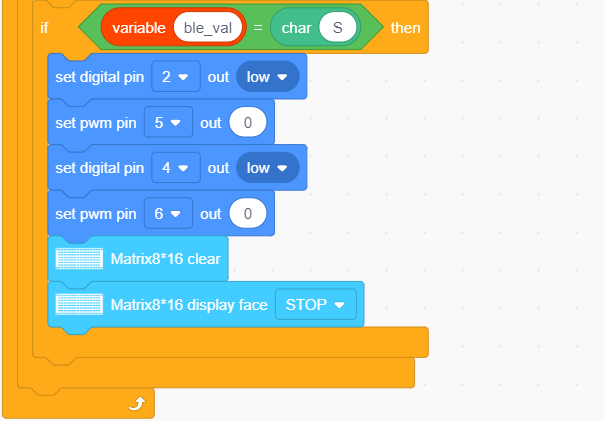
Plaats de BT-module en open je telefoon om via Bluetooth verbinding te maken en de slimme auto te besturen. De auto zal vooruit, achteruit rijden, naar links en rechts draaien en stoppen. Ook zal het 8*8 LED-bord de bijbehorende patronen tonen.