3. サーボの角度を設定する
次のレッスンでは、このスマートファームキットを組み立てます。キットにサーボを組み立てる前に、角度を165°に設定する(両端に15°のバッファを確保する)必要があります。これにより、期待どおりに動作し、機械的損傷を回避できます。
⚠ 警告 — 続行する前にお読みください:
サーボを180°に設定しないでください。 ドア機構は0°~180°の全範囲を必要としません。極端な端に設定すると、サーボが機械的なストッパーに押し付けられ、過熱してサーボモーターが永久に損傷する可能性があります。
取り付け中はボードに電源を供給し続けてください。 サーボに電源が供給され、角度を保持している間は、ギアやドアを手で無理に動かさないでください。ボードに電源が供給されていない場合、サーボには保持トルクがなく、ギアを手動で回転させると、校正された角度がずれ、電源投入後に位置ずれが発生します。
無理な力を加えないでください。 ドアがスムーズに動かない場合は、すぐに停止して組み立てを確認してください。無理に動かすとサーボギアが破損します。
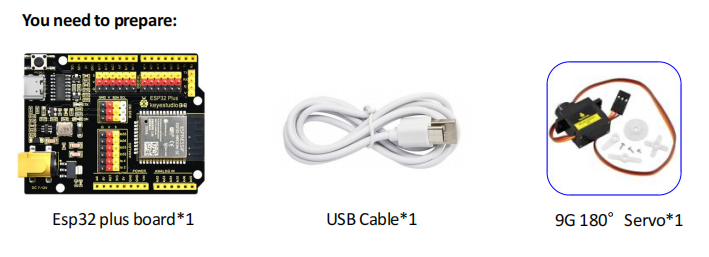
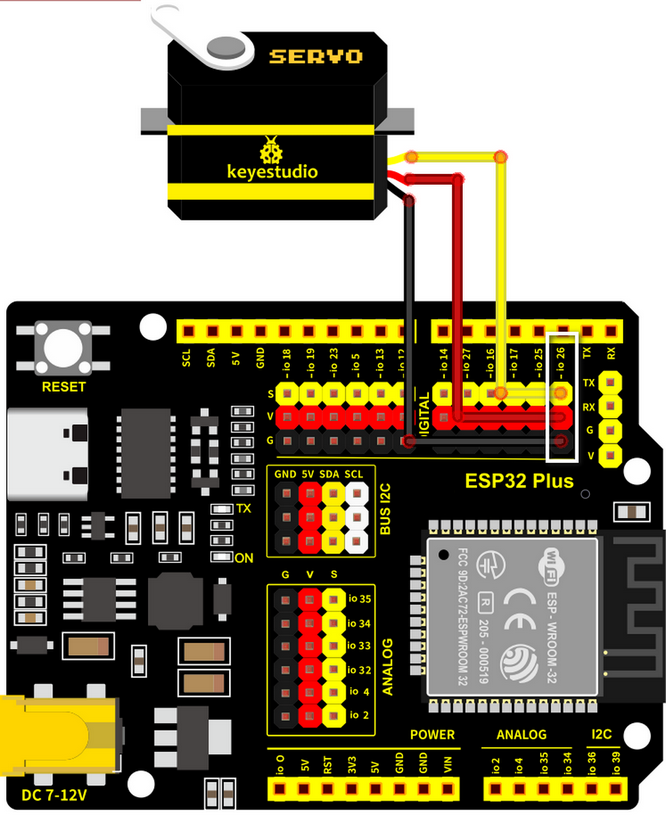
サーボをESP32 PLUSボードのピンio26に接続します。注:サーボの茶色、赤、オレンジのワイヤーはそれぞれGND(G)、5V(V)、ピンio26に接続されています。
ESP32 PLUSボードをコンピューターに接続します。

Arduino IDE用のESP32Servo.hライブラリがインストールされていることを確認してください。インストールされていない場合は、前のセクションを参照してインストールしてください。
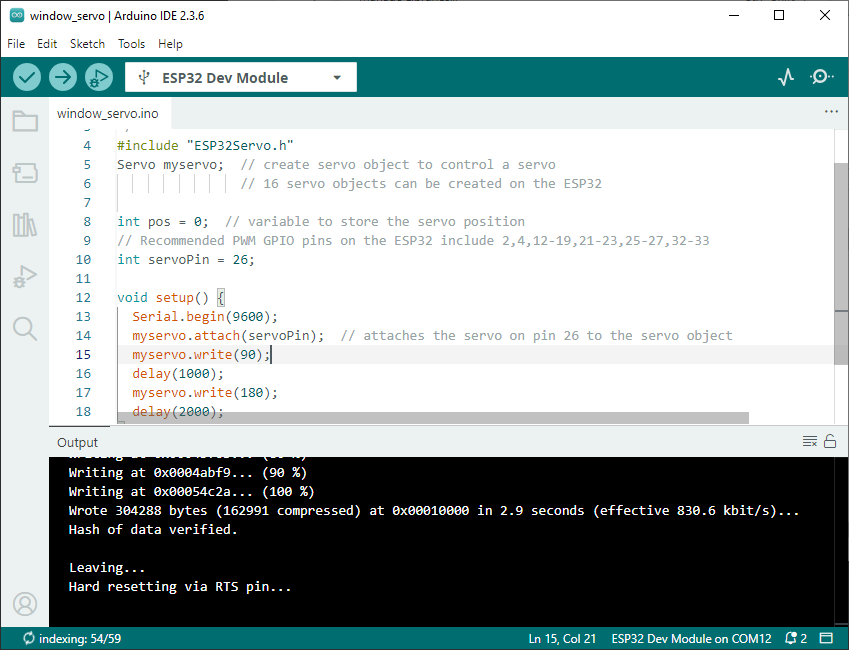
チュートリアルパッケージで提供されているwindow_servoコードをArduino IDEで開きます。
注: 提供されている
window_servoコードは、サーボを165°に設定します(180°ではありません)。これにより、終端での衝突を防ぐために15°の機械的バッファが確保されます。ドアの動作範囲は15°~165°です。
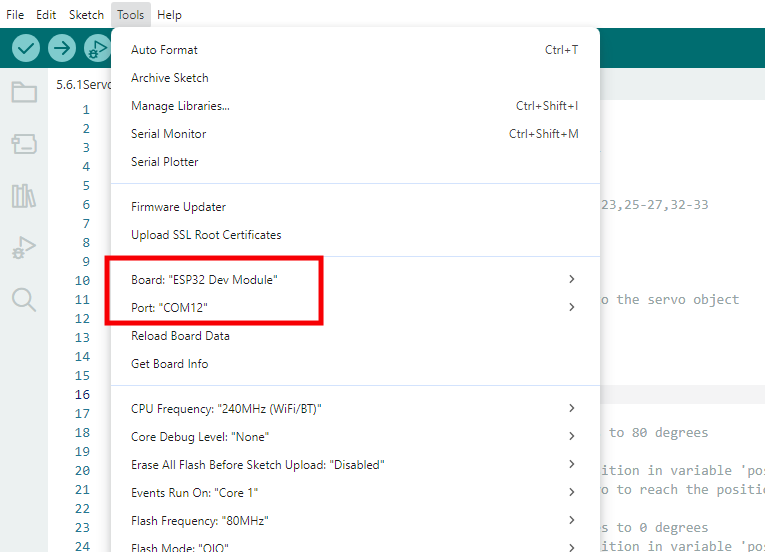
ツールをクリックし、ボードタイプに「ESP32 Dev Module」を選択し、デバイスマネージャーに表示されているようにポートにCOM-XXを選択します。
 をクリックしてアップロードします。アップロードが完了すると、サーボは165°に移動し、その位置を保持します。
をクリックしてアップロードします。アップロードが完了すると、サーボは165°に移動し、その位置を保持します。
重要: 組み立て手順に進む間、ボードに電源を供給し、サーボを165°で保持したままにしてください。ドアパネルが完全にインストールされるまで、電源を切断したり、ギアを手動で動かしたりしないでください。