Bezüglich des Sprachwechsels im Tutorial beachten Sie bitte das folgende animierte Bild. Concernant le changement de langue dans le tutoriel, veuillez vous référer à l’image animée suivante. En relación con el cambio de idioma en el tutorial, consulte la siguiente imagen animada. Per quanto riguarda il cambio di lingua nel tutorial, fare riferimento alla seguente immagine animata. Jeśli chodzi o przełączanie języka w samouczku, zapoznaj się z poniższym obrazkiem animowanym. Wat betreft het veranderen van de taal in de tutorial, zie de volgende geanimeerde afbeelding. Angående språkbytet i handledningen, vänligen se följande animerade bild.
1. Introduzione al prodotto
1.1 Introduzione
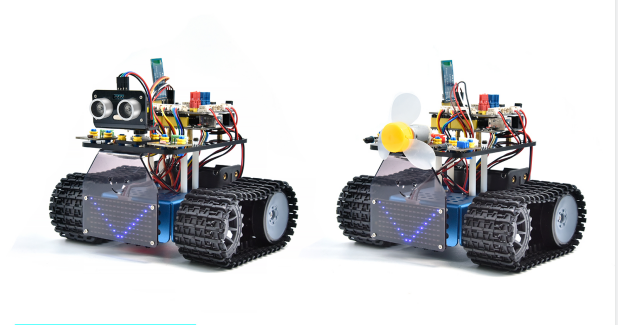
Questo robot carro armato educativo STEM V3.1 è stato recentemente aggiornato, aggiungendo una funzione di tracciamento della linea e di estinzione degli incendi. Rafforza notevolmente il rapporto tra bambini e genitori, e stimola l’immaginazione dei bambini attraverso la programmazione e la codifica.
Nel corso del processo di assemblaggio, è possibile vedere le sue molteplici funzioni come il seguimento della luce, il tracciamento della linea, il telecomando IR e BT, la regolazione della velocità e così via. Inoltre, sono presenti alcuni piccoli componenti che possono aiutare ad assemblare il robot car.
Sono inclusi sensori e moduli di base, come un sensore di fiamma, un sensore BT, un sensore di rilevamento ostacoli, un sensore di tracciamento della linea e un sensore a ultrasuoni.
I due tutorial per il codice in linguaggio C di Arduino IDE e la programmazione grafica KidsBlock sono adatti anche agli appassionati di diverse età.
È davvero la scelta migliore per te.
1.2 Caratteristiche
Funzioni multiple: Confinamento, tracciamento della linea, estinzione degli incendi, seguimento della luce, telecomando IR e BT, controllo della velocità e così via.
Facile da costruire: assemblare il robot con alcuni componenti.
Alta resistenza: staffe in lega di alluminio, motori in metallo, ruote di alta qualità.
Alta estensibilità: collegare molti sensori e moduli tramite lo shield per motori e componenti LEGO.
Controlli multipli: telecomando IR, controllo tramite App (sistema iOS e Android).
Programmazione di base: codice in linguaggio C di Arduino IDE e programmazione grafica KidsBlock.
1.3 Parametri
Tensione di funzionamento: 5V
Tensione di ingresso: 6-9V
Corrente di uscita massima: 1.5A
Potenza dissipata massima: 32W
Velocità del motore: 5V 200 rpm / min
Modalità di pilotaggio del motore: doppio ponte H (HR8833)
Angolo di rilevamento ultrasonico: <15°
Distanza di rilevamento ultrasonico: 2cm-300cm
Distanza di controllo remoto a infrarossi: 10 metri (misurata)
Distanza di controllo remoto BT: 30 metri (misurata)
1.4 Lista dei componenti
N. |
Nome |
Q.tà |
Immagine |
|---|---|---|---|
1 |
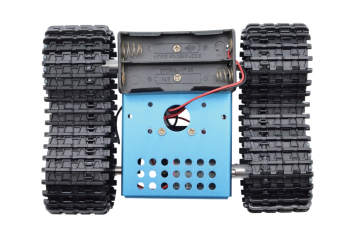
Assieme base |
1 |
|
2 |
Scheda di sviluppo |
1 |
|
3 |
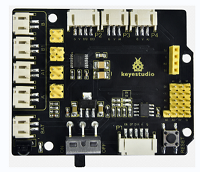
Scheda di espansione per driver motore |
1 |
|
4 |
Modulo BLE BT |
1 |
|
5 |
Sensore ultrasonico HC-SR04 |
1 |
|
6 |
Pannello LED Keyestudio 8*16 |
1 |
|
7 |
Modulo LED giallo |
1 |
|
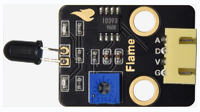
8 |
Sensore di fiamma |
2 |
|
9 |
Modulo motore 130 |
1 |
|
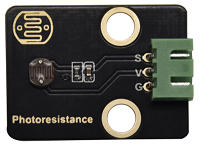
10 |
Fotoresistenza |
2 |
|
11 |
Pannello acrilico per LED 8*16 |
1 |
|
12 |
Pannello acrilico superiore |
1 |
|
13 |
Pannello acrilico |
1 |
|
14 |
Telecomando |
1 |
|
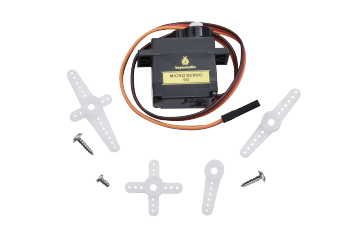
15 |
Servo |
1 |
|
16 |
Cavo USB |
1 |
|
17 |
Tubo avvolgicavo |
1 |
|
18 |
Cacciavite 3.0*40MM |
1 |
|
19 |
Fascette 3*100MM |
5 |
|
20 |
Chiave a L M2.5 |
1 |
|
21 |
Chiave a L M3 |
1 |
|
22 |
Chiave a L M1.5 |
1 |
|
23 |
Cartone |
1 |
|
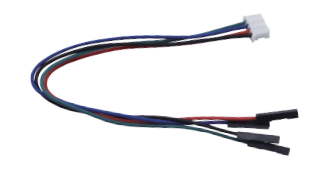
24 |
Cavo Dupont 4P M-F PH2.0mm a 2.54 |
1 |
|
25 |
Cavo Dupont 4P HX-2.54 |
1 |
|
26 |
Cavo Dupont 5P JST-PH2.0MM |
1 |
|
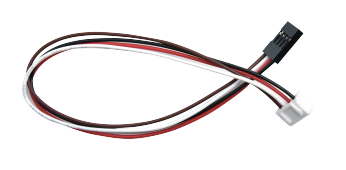
27 |
Cavo Dupont 3P-3P XH2.54 a 2.54 |
1 |
|
28 |
Cavo Dupont 3P-3P XH2.54 a PH2.0 |
2 |
|
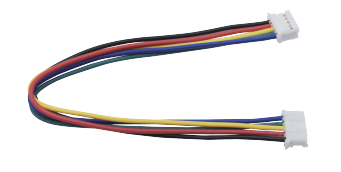
29 |
Cavo Dupont 4P-3P XH2.54 a PH2.0 |
2 |
|
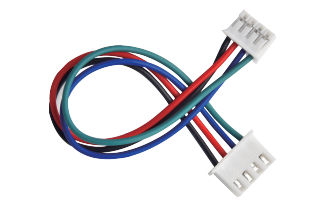
30 |
Cavo Dupont 4P XH2.54 a PH2.0 |
1 |
|
31 |
Viti a testa tonda M1.4*8MM |
6 |
|
32 |
Dadi M1.4 |
6 |
|
33 |
Dadi M2 |
8 |
|
34 |
Viti a testa tonda M2*8MM |
8 |
|
35 |
Viti a testa tonda M1.2*5MM |
6 |
|
36 |
Viti a testa tonda M3*6MM |
18 |
|
37 |
Viti a testa piatta M3*10MM |
3 |
|
38 |
Dadi M3 |
3 |
|
39 |
Distanziale passante M3*10MM |
4 |
|
40 |
Distanziale passante M3*45MM |
4 |
|
41 |
Perno assiale tecnico con nervature di attrito |
11 |
|
42 |
Boccola tecnica 4265c |
11 |
|
43 |
Ponticello blu |
4 |
|
44 |
Ponticello rosso |
4 |
|
45 |
Chiave a forchetta singola |
1 |
|
46 |
Chiave a forchetta doppia |
1 |
|
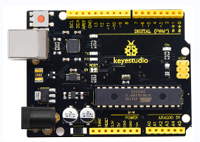





























1.5 Scheda di sviluppo Keyestudio V4.0
È necessario sapere che la scheda di sviluppo Keyestudio V4.0 è il cuore di questo robot car intelligente.
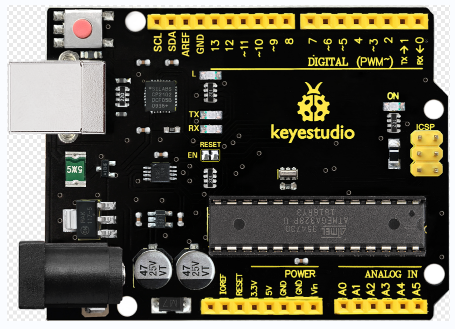
La scheda di sviluppo Keyestudio V4.0 è basata sul microcontrollore ATmega328P e utilizza un chip CP2102 come convertitore UART-USB.
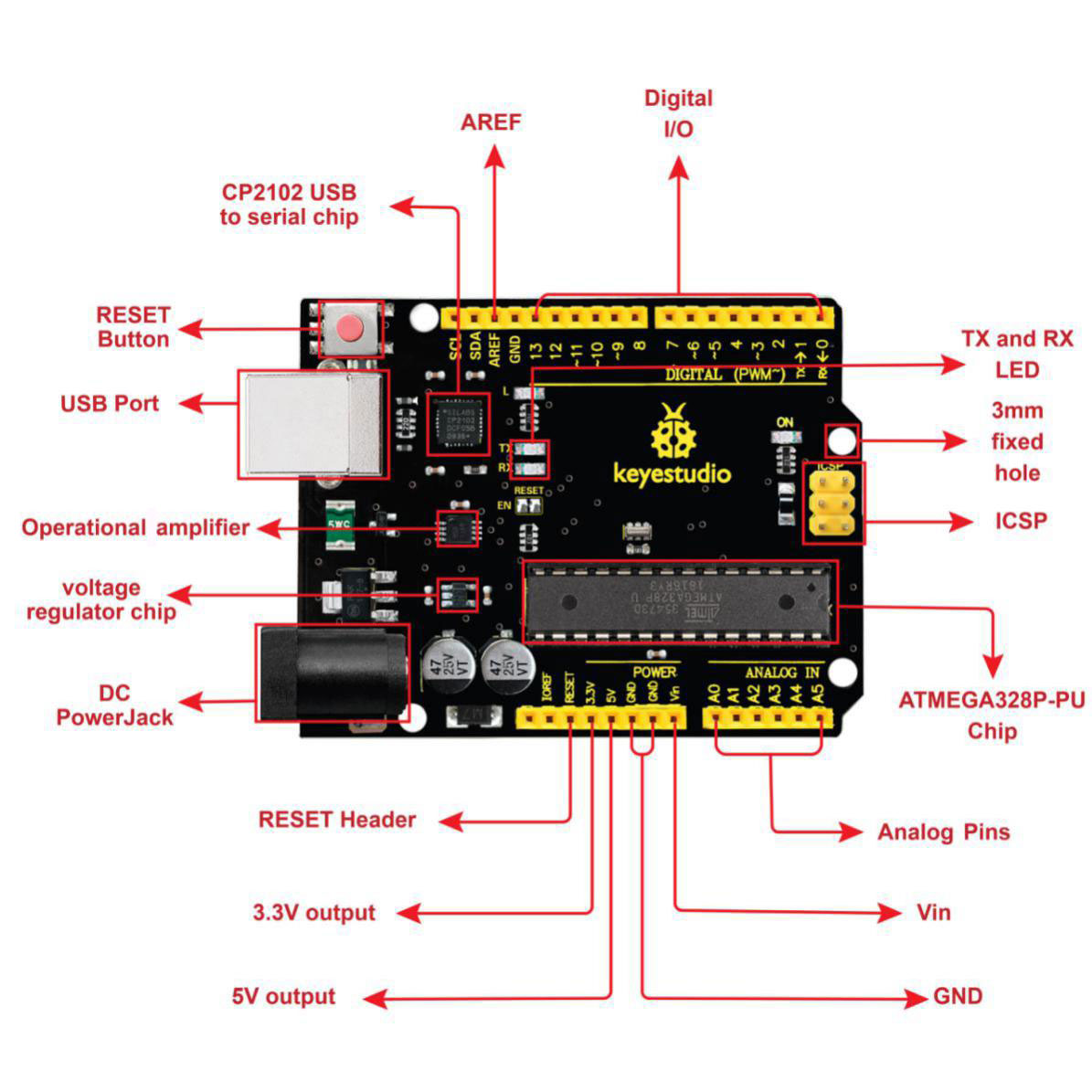
Dispone di 14 pin digitali di input/output (di cui 6 possono essere utilizzati come uscite PWM), 6 ingressi analogici, un cristallo al quarzo da 16 MHz, una connessione USB, un jack di alimentazione, 2 header ICSP e un pulsante di reset.
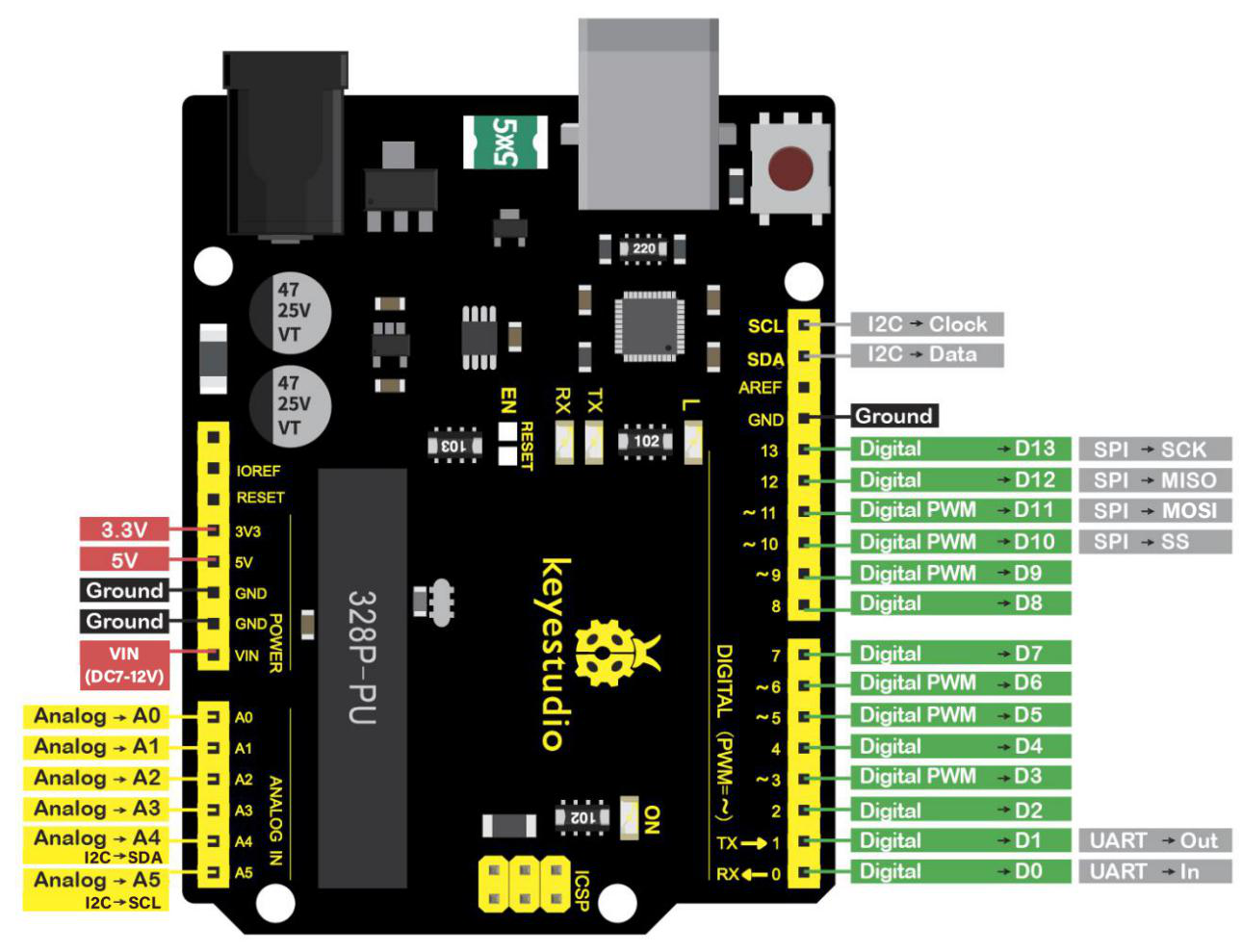
Può essere alimentata tramite cavo USB, il jack di alimentazione DC esterno (DC 7-12V) oppure tramite i pin femmina Vin/GND (DC 7-12V).
Microcontrollore |
ATmega328P-PU |
|---|---|
Tensione operativa |
5V |
Tensione di ingresso (consigliata) |
DC7-12V |
Pin digitali I/O |
14 (D0-D13) (di cui 6 forniscono uscita PWM) |
Pin digitali I/O PWM |
6 (D3, D5, D6, D9, D10, D11) |
Pin di ingresso analogico |
6 (A0-A5) |
Corrente DC per pin I/O |
20 mA |
Corrente DC per pin 3.3V |
50 mA |
Memoria Flash |
32 KB (ATmega328P-PU) di cui 0.5 KB utilizzati dal bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
Velocità di clock |
16 MHz |
LED_BUILTIN |
D13 |