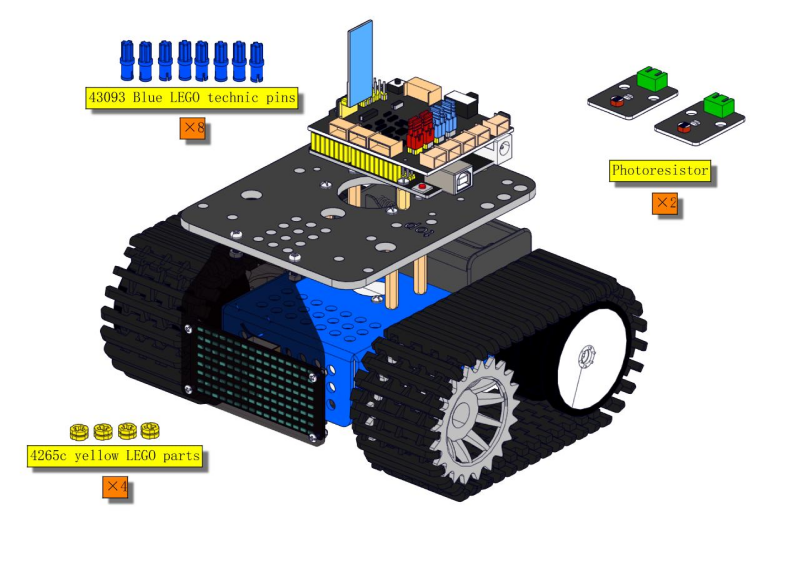
2. Installazione del Prodotto
Attenzione: Impostare l’angolo iniziale del servo e rimuovere le pellicole protettive dalle schede prima di installare questo robot.

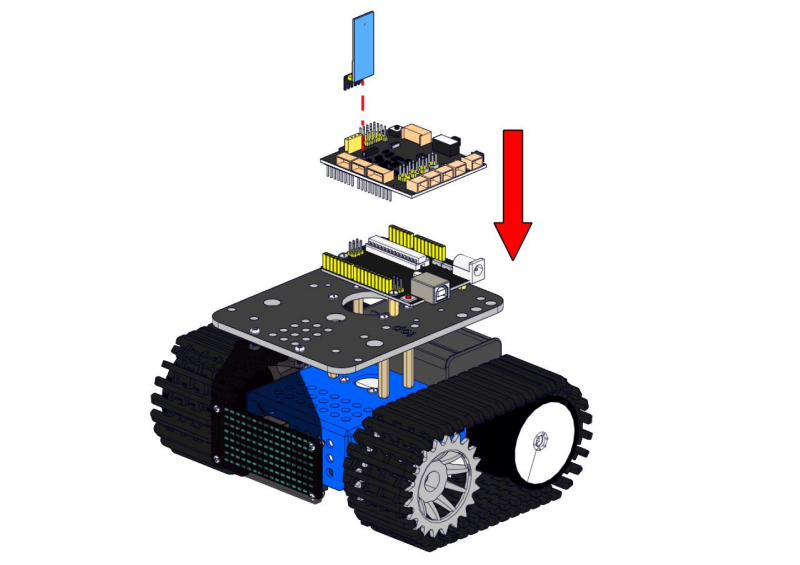
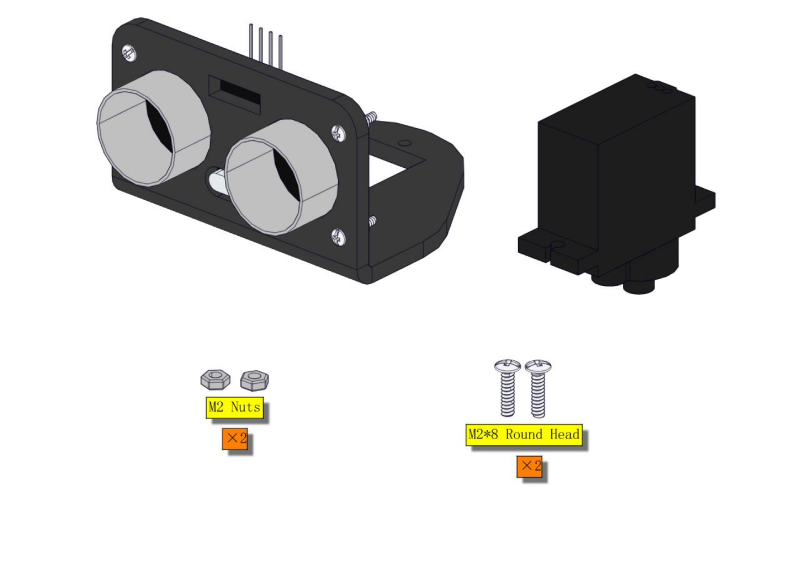
Step1

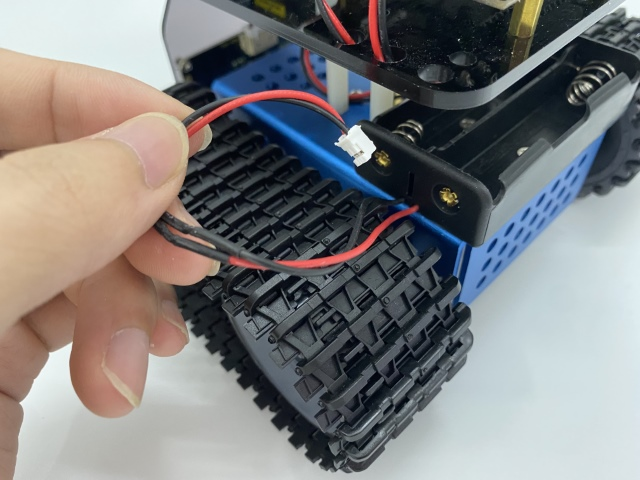
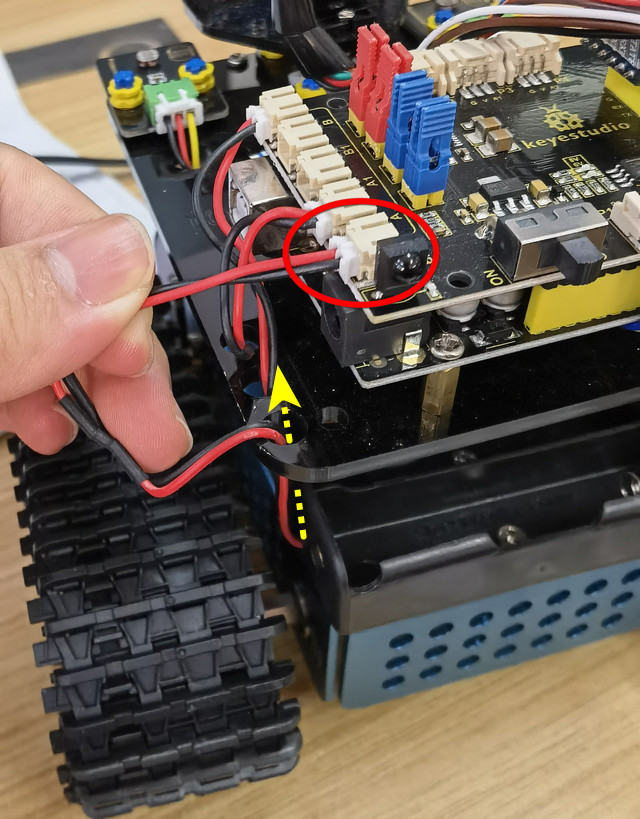
Prima effettuare i collegamenti elettrici.
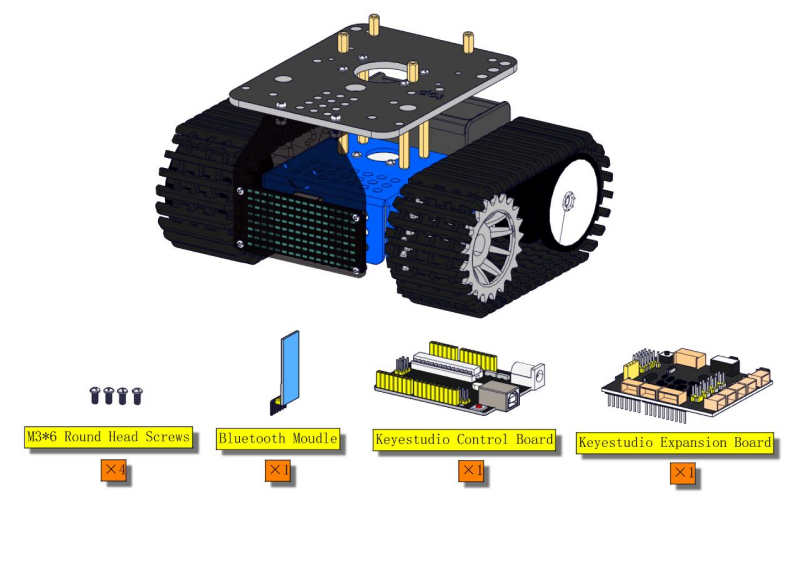
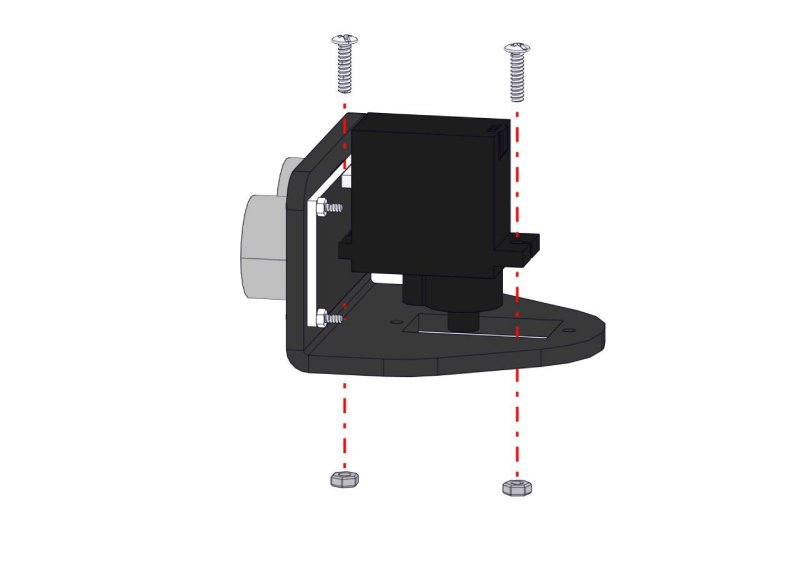
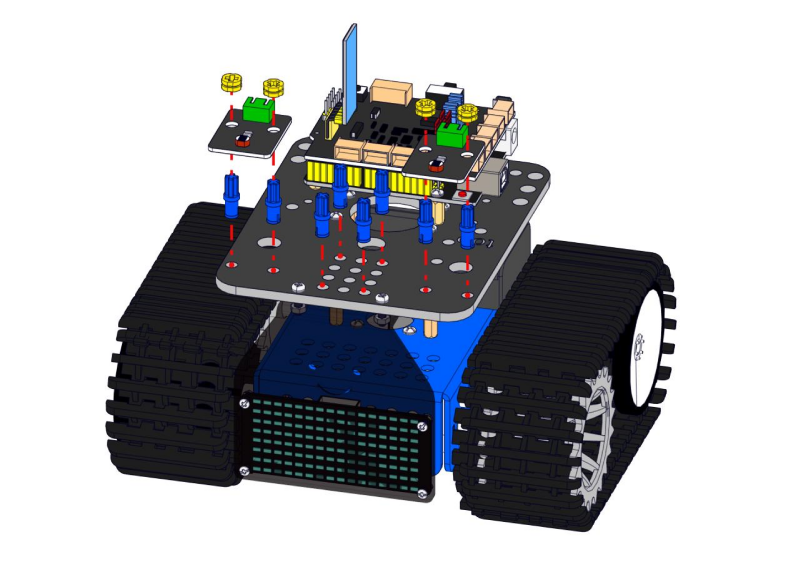
**Step2 **
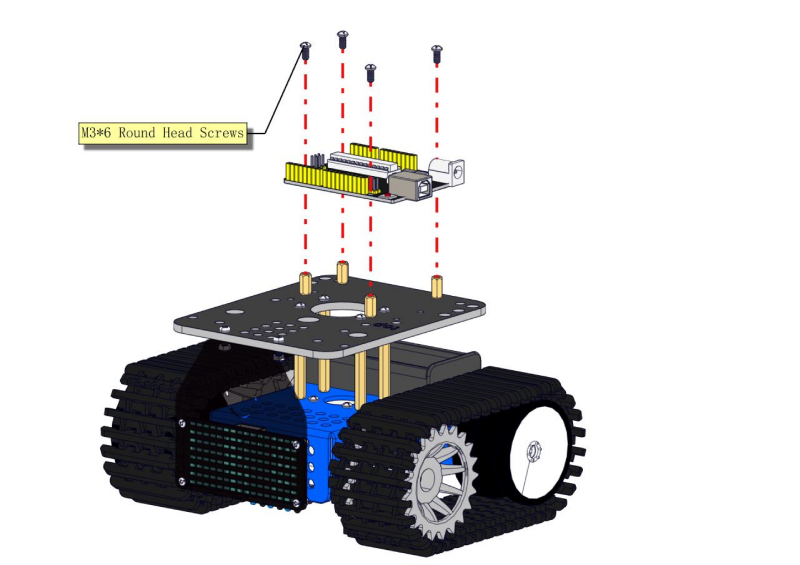
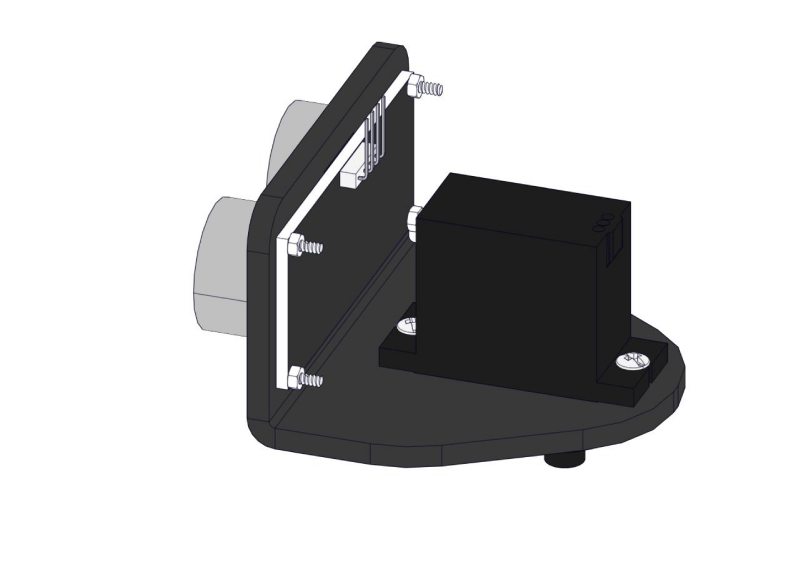
Step 3

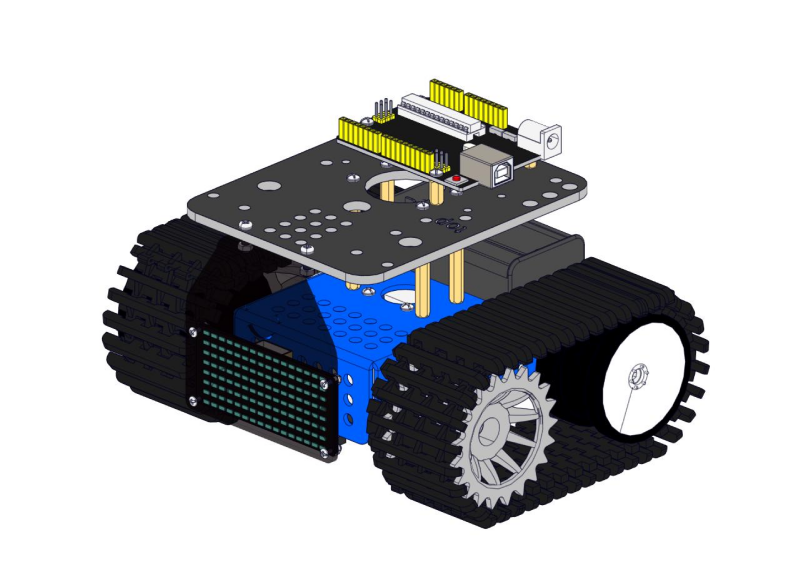
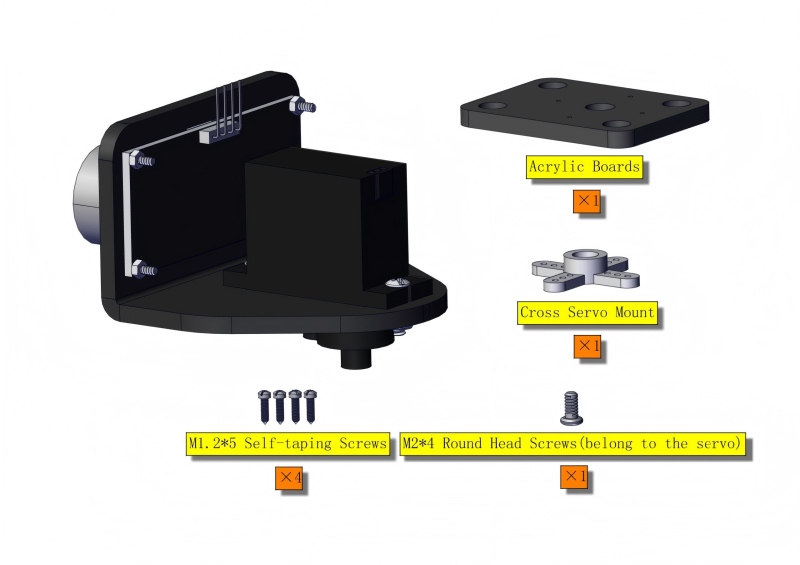
Step 4
Step 5
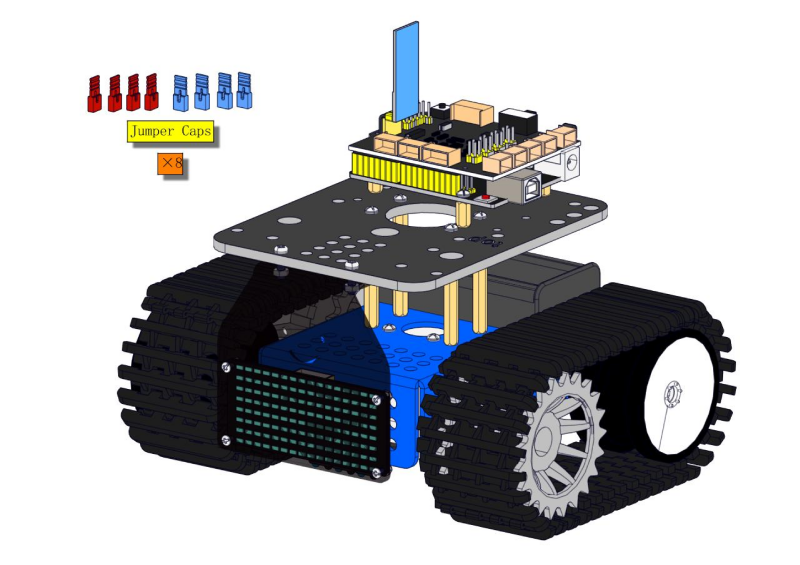
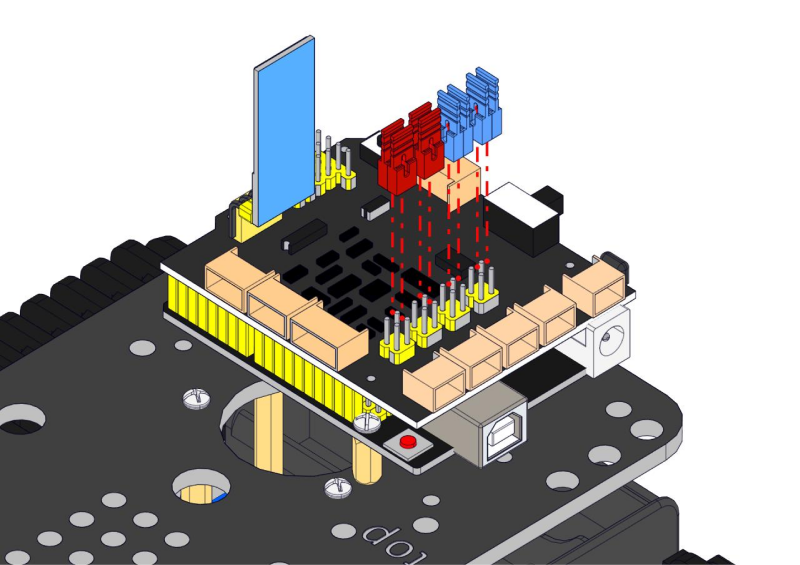
Prestare attenzione alla direzione dei ponticelli.
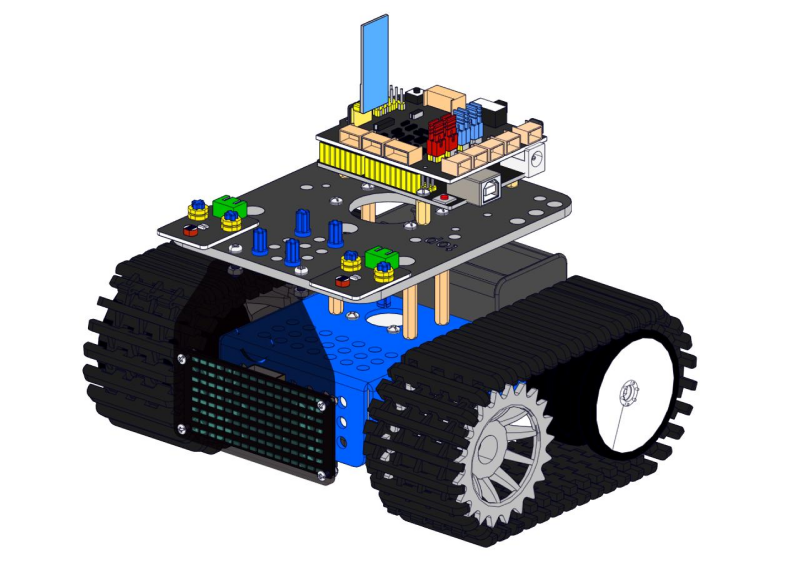
Step 6
Step 7
Step 8
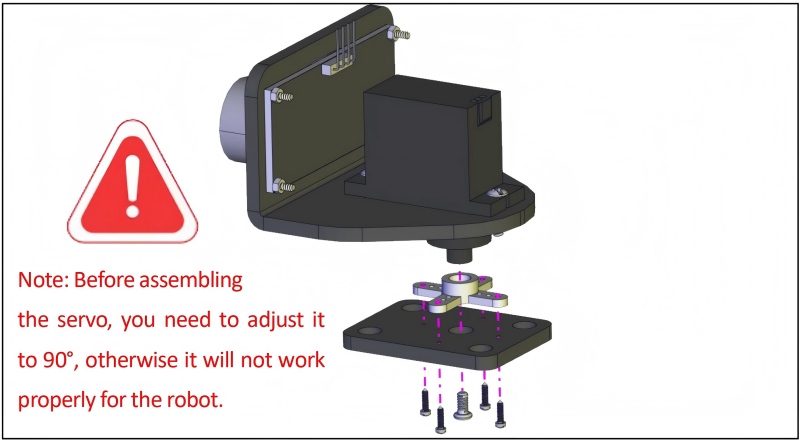
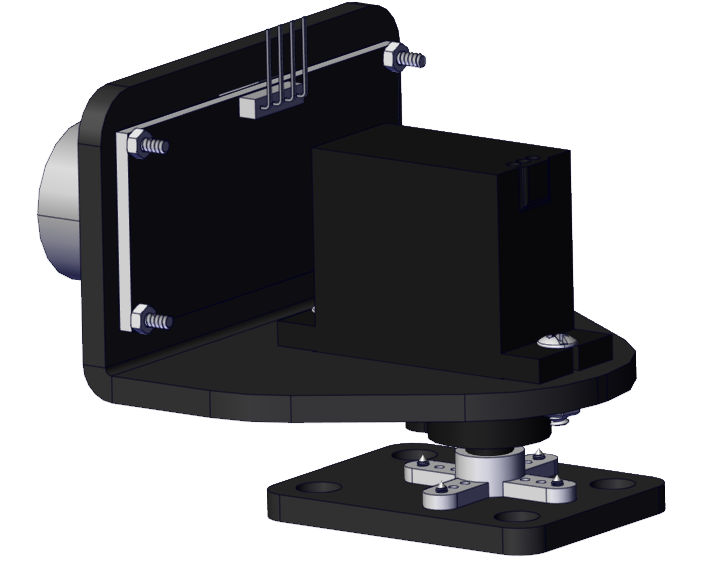
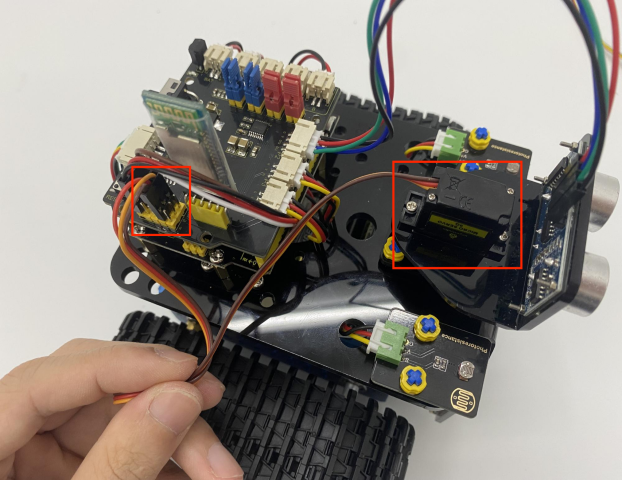
(È necessario regolare l’angolo del servo)
Impostare l’angolo del servo a 90°
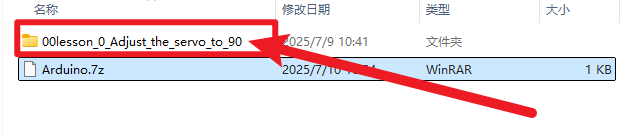
Per regolare il codice del servo, selezionarlo in base al corso.
1.Arduino: Scarica il file del codice: Arduino
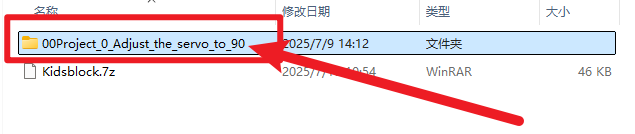
2.**Kidsblock: **Scarica il file del codice: Kidsblock
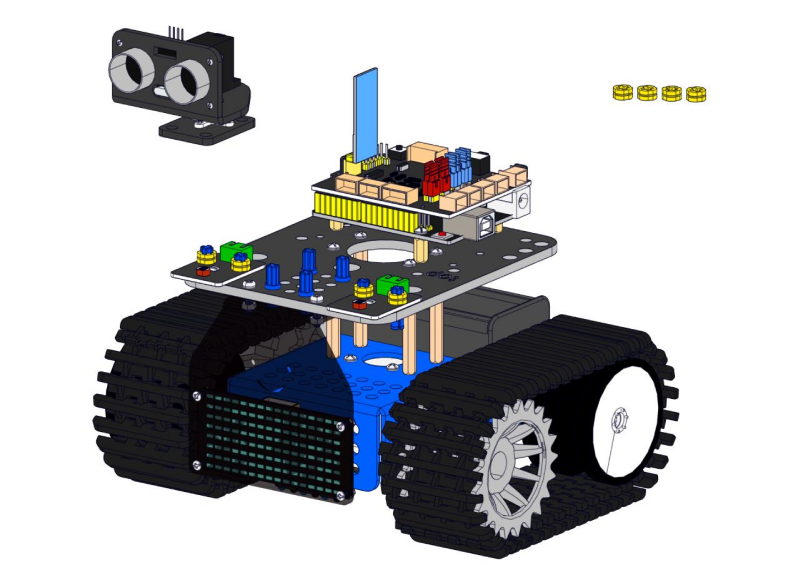
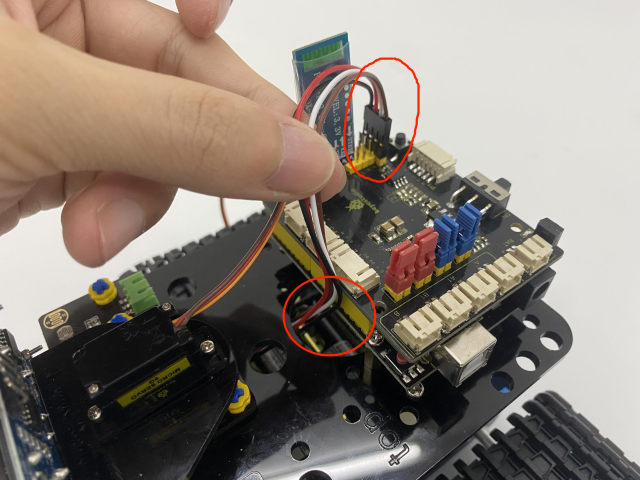
Dopo aver inizializzato l’angolo del servo, installare il modulo Bluetooth.
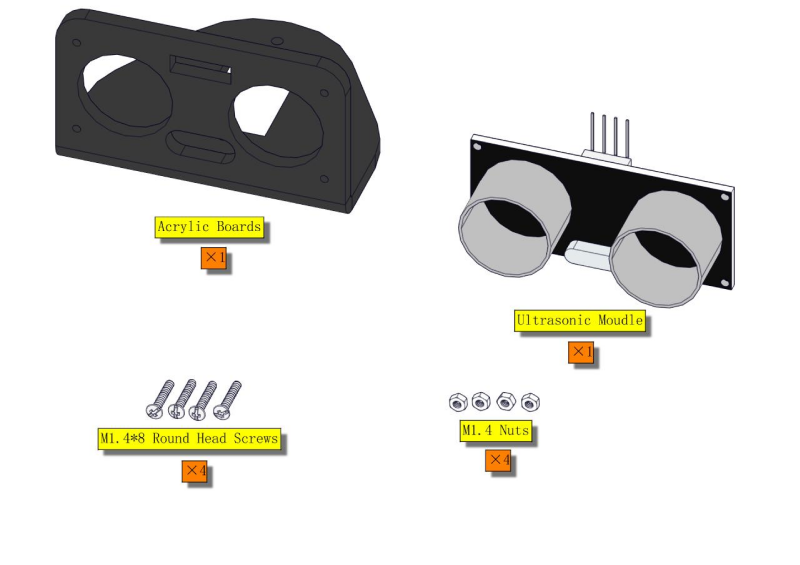
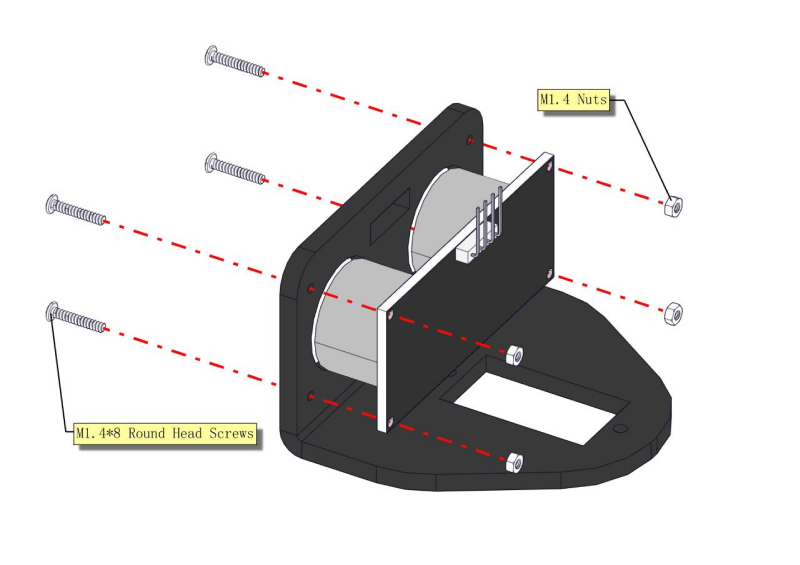
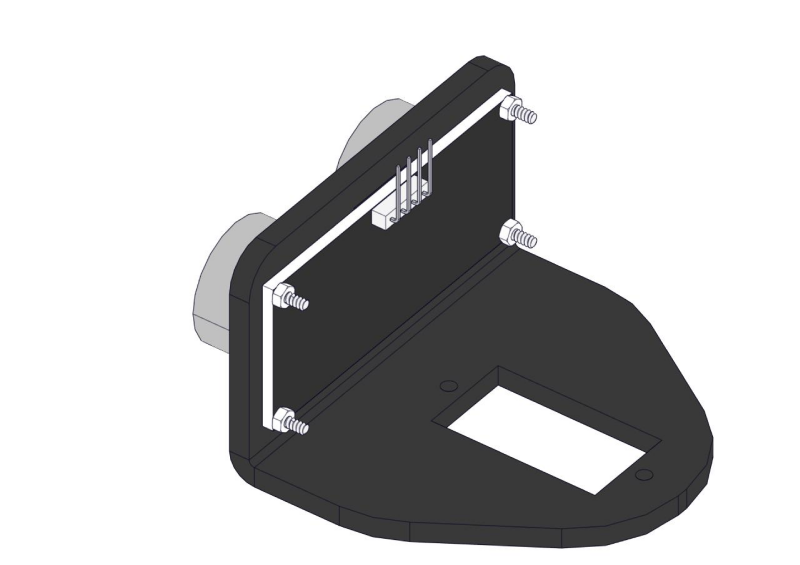
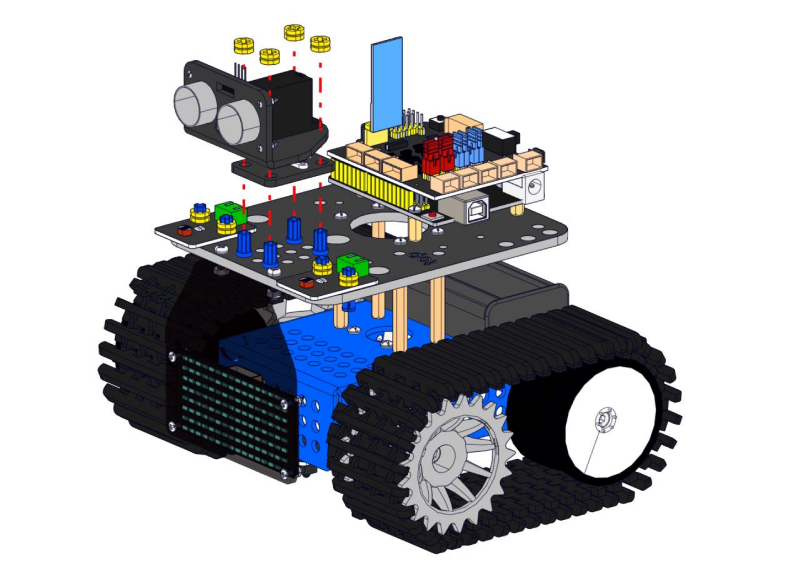
Mantenere il sensore ultrasonico parallelo alla scheda.
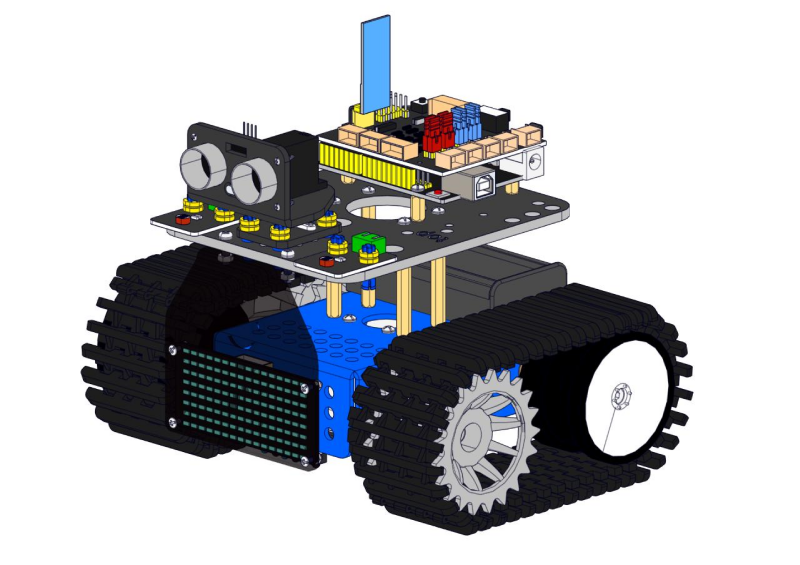
Step 9
Step 10
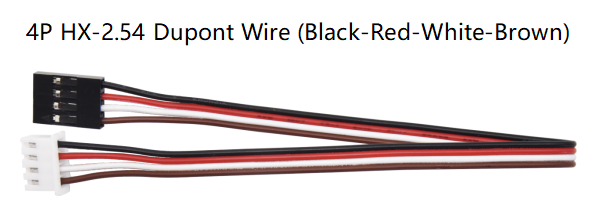
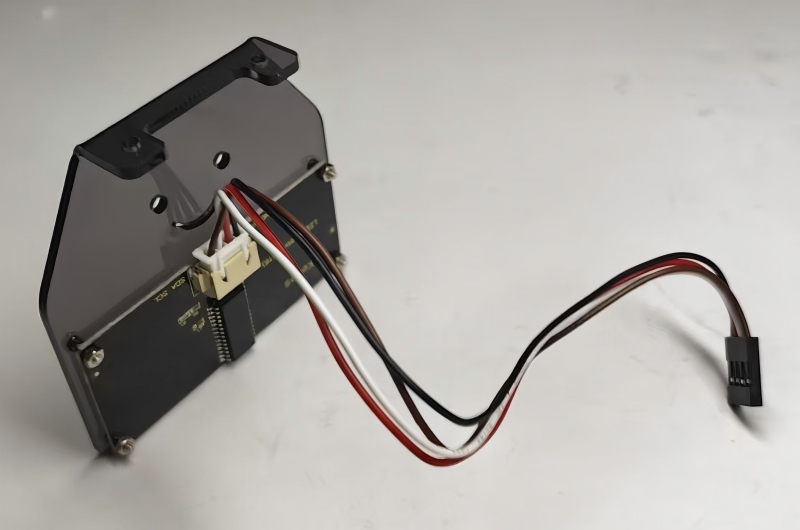
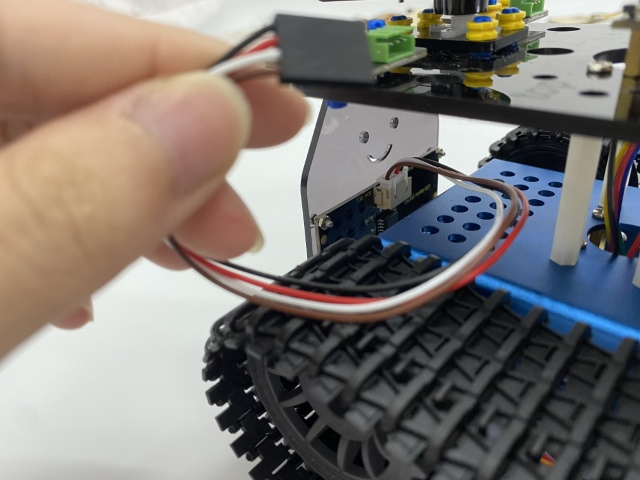
Collegamento dei cavi
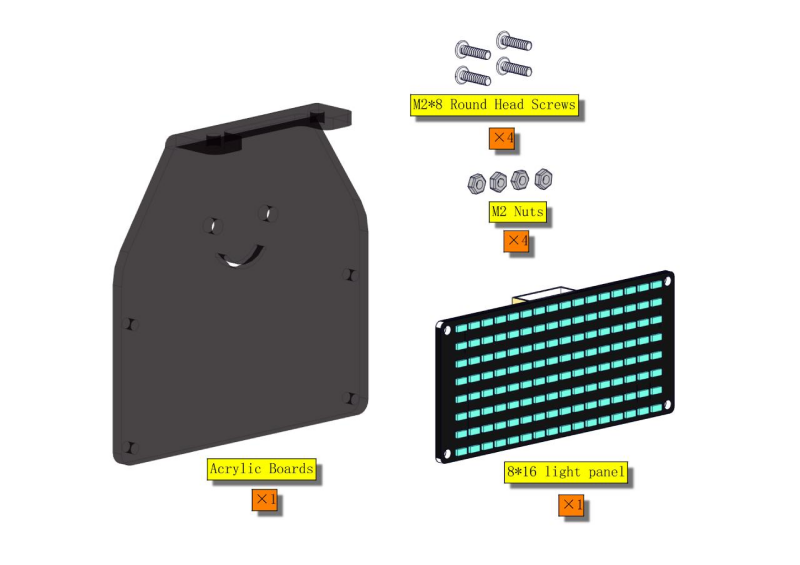
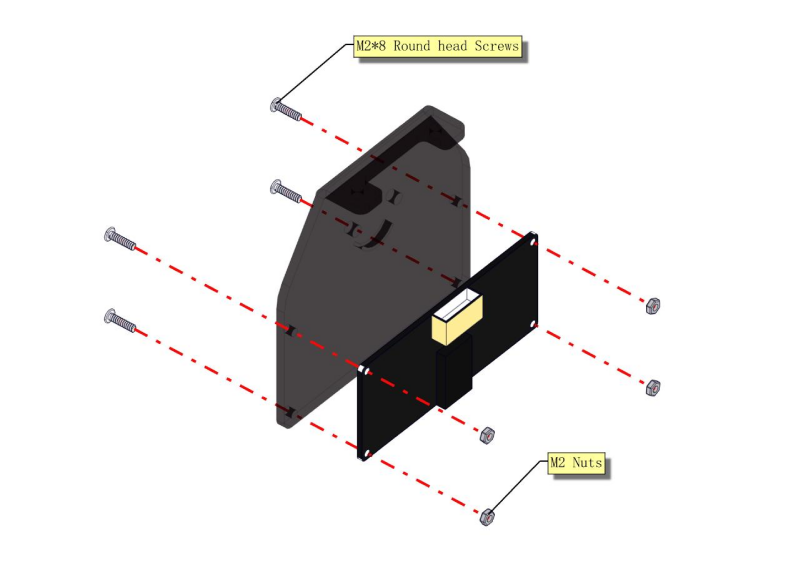
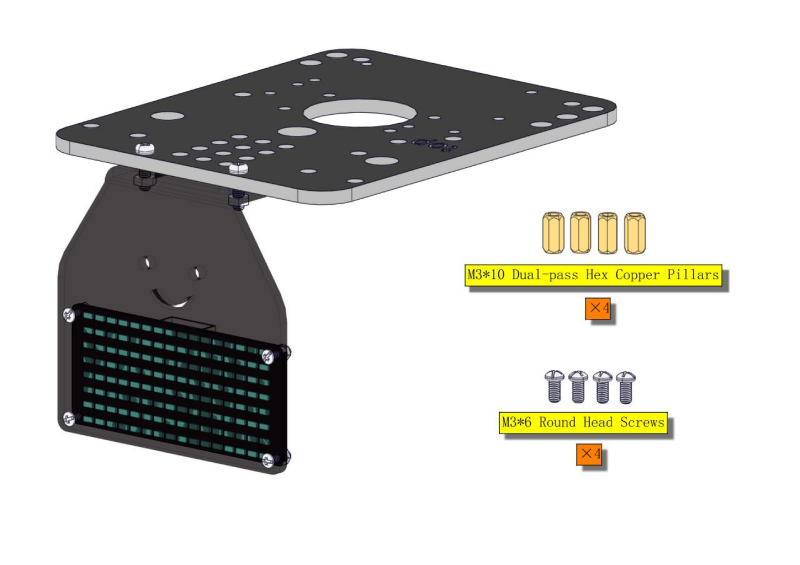
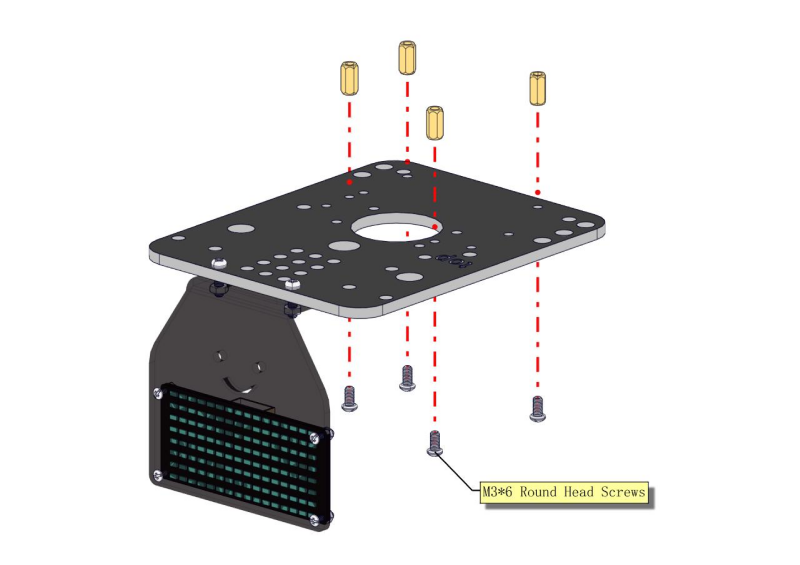
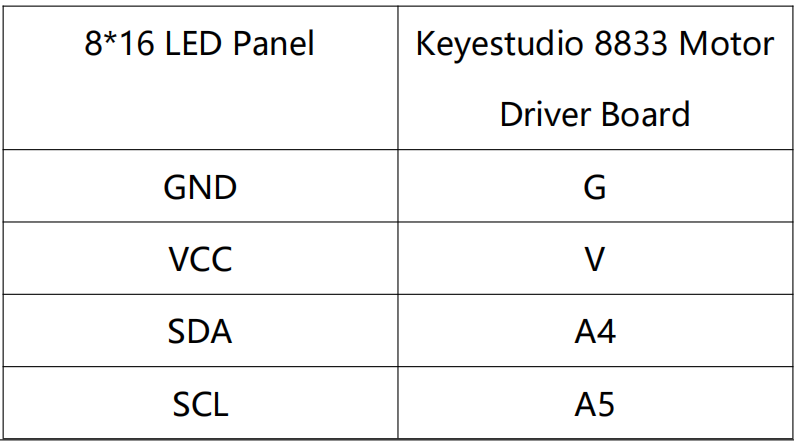
Per il pannello LED 8*16, collegare i cavi ad A4 e A5.
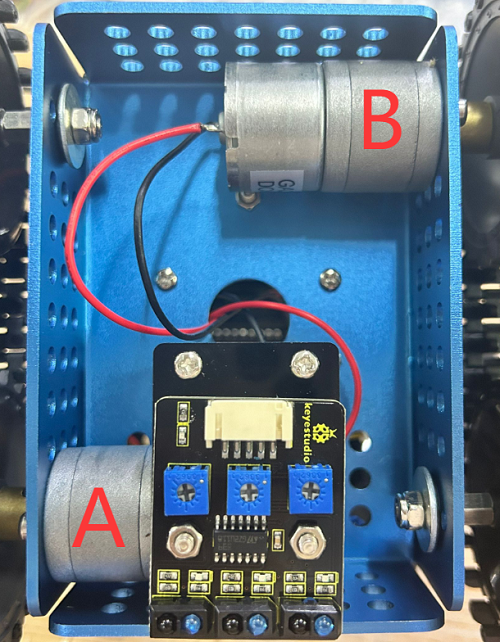
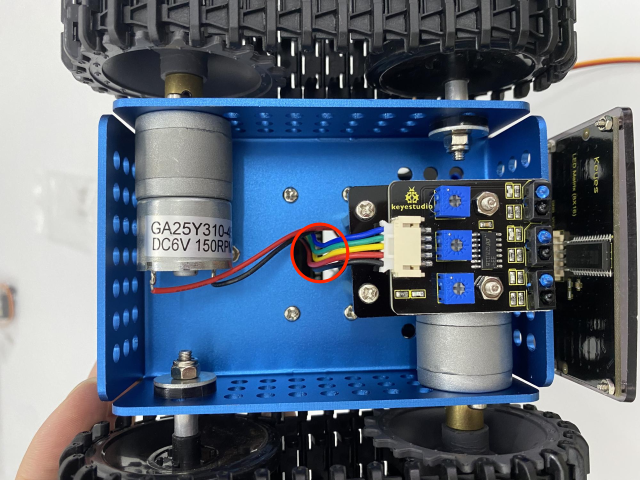
Collegare il motore A alla porta A e il motore B alla porta B.
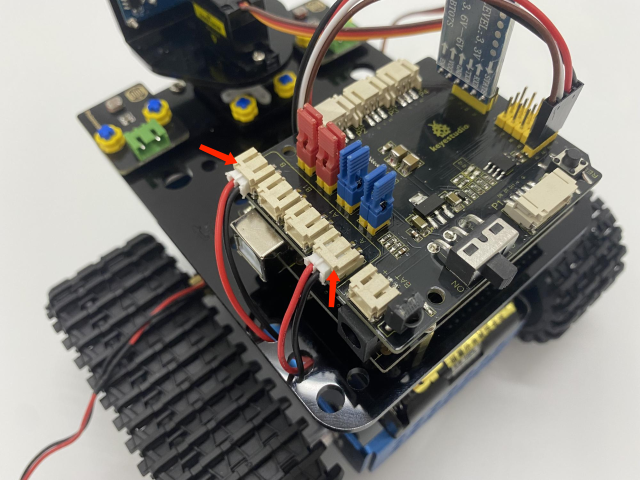
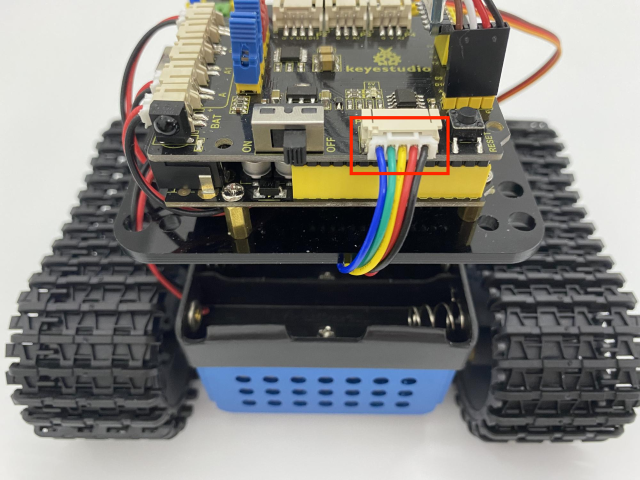
Collegare il cavo di alimentazione.
Sensore di rilevamento linea (vedere l’immagine)

Collegare i fotoresistori

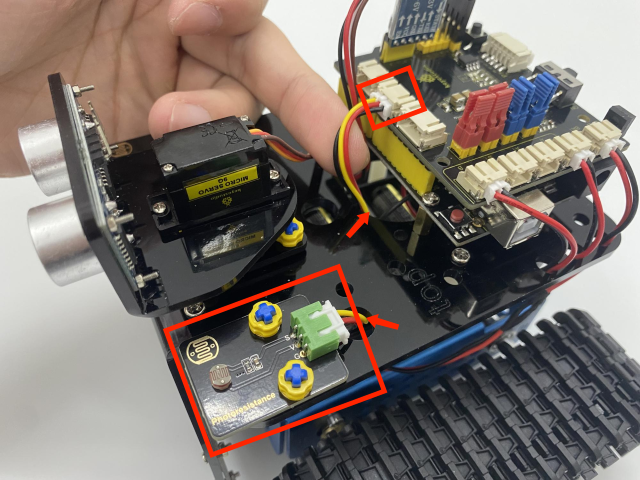
Fotoresistore |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
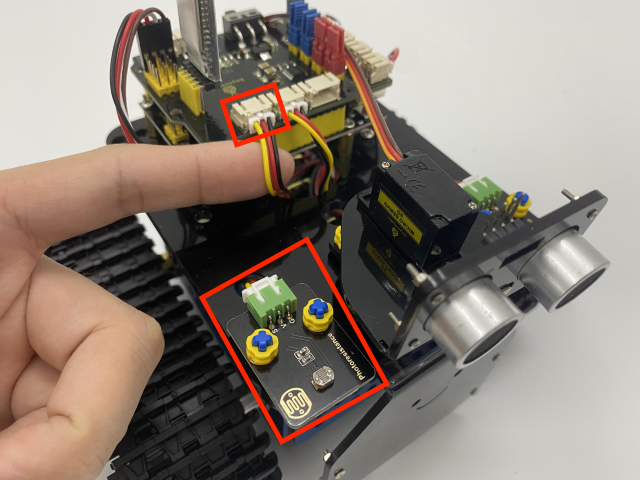
Fotoresistore |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
Collegare il sensore ultrasonico.

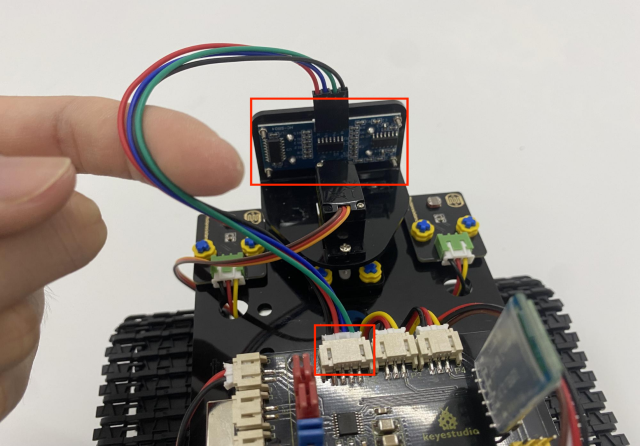
Sensore Ultrasonico |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
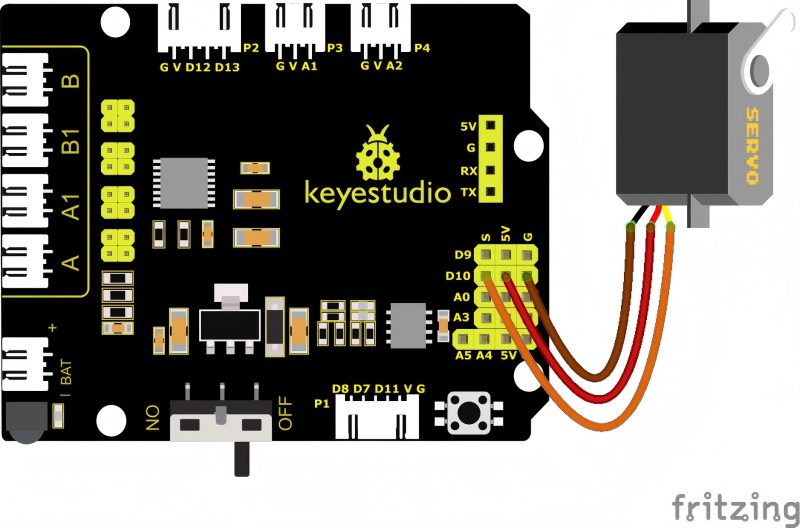
Collegare il servo (D10)
Servo |
Keyestudio 8833 Board |
|---|---|
Brown |
G |
Red |
V(5V) |
Orange |
D10 |
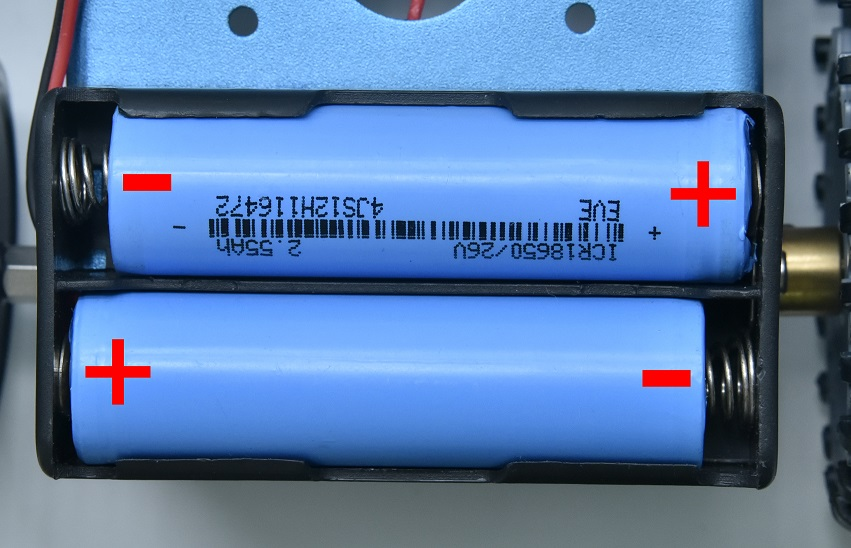
Si utilizza una batteria al litio 18650 con polo positivo a punta, per la quale la potenza e la capacità non sono vincolanti.