チュートリアルの言語切り替えについては、以下のアニメーション画像をご参照ください。
1. 製品紹介
1.1 はじめに
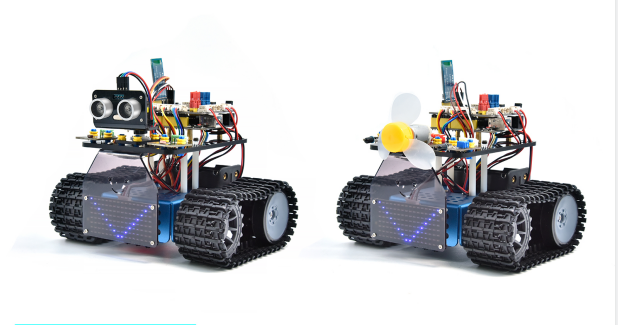
このSTEM教育用V3.1タンクロボットは新たにアップグレードされ、ライントラッキングと消火機能が追加されました。プログラミングとコーディングを通じて、子供と保護者の絆を強め、子供たちの想像力を刺激します。
組み立てプロセスの中で、ライトフォロー、ライントラッキング、IRおよびBTリモートコントロール、速度調整など、複数の機能を確認できます。また、ロボットカーの組み立てに役立つ小さなパーツもあります。
炎センサー、BTセンサー、障害物回避センサー、ライントラッキングセンサー、超音波センサーなど、基本的なセンサーとモジュールが含まれています。
Arduino IDE のC言語コードと KidsBlock グラフィカルプログラミングの2種類のチュートリアルは、さまざまな年齢の愛好家にも適しています。
これはまさに最良の選択です。
1.2 特徴
多機能:領域制限、ライントラッキング、消火、ライトフォロー、IRおよびBTリモートコントロール、速度制御など。
簡単な組み立て:いくつかのパーツでロボットを組み立て。
高い耐久性:アルミ合金ブラケット、金属モーター、高品質ホイール。
高い拡張性:モータードライバーシールドとLEGOパーツを通じて多くのセンサーやモジュールを接続可能。
複数の制御方法:IRリモートコントロール、アプリコントロール(iOSおよびAndroidシステム)。
基本プログラミング:Arduino IDE のC言語コードと KidsBlock グラフィカルプログラミング。
1.3 仕様
動作電圧:5V
入力電圧:6-9V
最大出力電流:1.5A
最大消費電力:32W
モーター速度:5V 200 rpm/分
モータードライブ方式:デュアルHブリッジドライブ(HR8833)
超音波感知角度:<15°
超音波検知距離:2cm-300cm
赤外線リモートコントロール距離:10メートル(実測値)
BTリモートコントロール距離:30メートル(実測値)
1.4 キット内容
No. |
名称 |
数量 |
画像 |
|---|---|---|---|
1 |
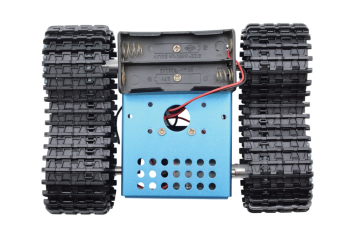
ボトムアセンブリ |
1 |
|
2 |
開発ボード |
1 |
|
3 |
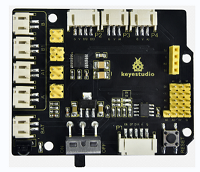
モータードライバー拡張ボード |
1 |
|
4 |
BLE BTモジュール |
1 |
|
5 |
HC-SR04 超音波センサー |
1 |
|
6 |
Keyestudio 8*16 LEDパネル |
1 |
|
7 |
黄色LEDモジュール |
1 |
|
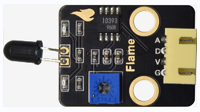
8 |
炎センサー |
2 |
|
9 |
130モーターモジュール |
1 |
|
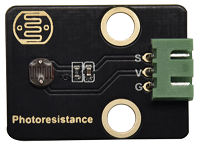
10 |
フォトレジスター |
2 |
|
11 |
8*16 LEDパネル用アクリルボード |
1 |
|
12 |
トップアクリルボード |
1 |
|
13 |
アクリルボード |
1 |
|
14 |
リモートコントロール |
1 |
|
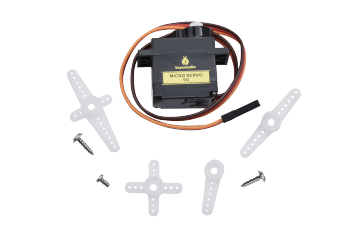
15 |
サーボ |
1 |
|
16 |
USBケーブル |
1 |
|
17 |
巻きパイプ |
1 |
|
18 |
3.0*40MM ドライバー |
1 |
|
19 |
3*100MM 結束バンド |
5 |
|
20 |
L型 M2.5 レンチ |
1 |
|
21 |
L型 M3 レンチ |
1 |
|
22 |
L型 M1.5 レンチ |
1 |
|
23 |
段ボール |
1 |
|
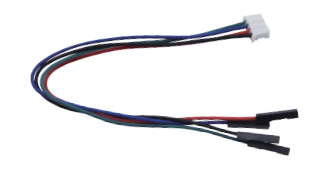
24 |
4P M-F PH2.0mm to 2.54 デュポンワイヤー |
1 |
|
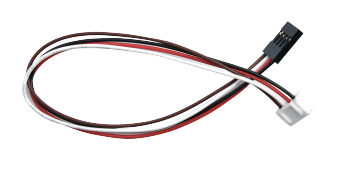
25 |
4P HX-2.54 デュポンワイヤー |
1 |
|
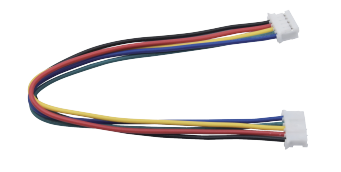
26 |
5P JST-PH2.0MM デュポンワイヤー |
1 |
|
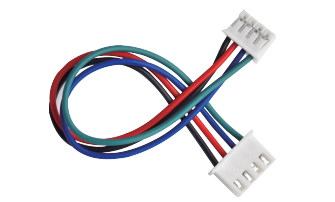
27 |
3P-3P XH2.54 to 2.54 デュポンワイヤー |
1 |
|
28 |
3P-3P XH2.54 to PH2.0 デュポンワイヤー |
2 |
|
29 |
4P-3P XH2.54 to PH2.0 デュポンワイヤー |
2 |
|
30 |
4P XH2.54 to PH2.0 デュポンワイヤー |
1 |
|
31 |
M1.4*8MM 丸頭ネジ |
6 |
|
32 |
M1.4 ナット |
6 |
|
33 |
M2 ナット |
8 |
|
34 |
M2*8MM 丸頭ネジ |
8 |
|
35 |
M1.2*5MM 丸頭ネジ |
6 |
|
36 |
M3*6MM 丸頭ネジ |
18 |
|
37 |
M3*10MM 皿頭ネジ |
3 |
|
38 |
M3 ナット |
3 |
|
39 |
M3*10MM 両通し銅柱 |
4 |
|
40 |
M3*45MM 両通し銅柱 |
4 |
|
41 |
テクニックアクスルピン(摩擦リッジ付き) |
11 |
|
42 |
4265c テクニックブッシュ |
11 |
|
43 |
青ジャンパーキャップ |
4 |
|
44 |
赤ジャンパーキャップ |
4 |
|
45 |
片口スパナ |
1 |
|
46 |
両口スパナ |
1 |
|
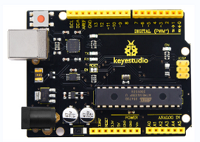





























1.5 Keyestudio V4.0 開発ボード
このスマートカーのコアは Keyestudio V4.0 開発ボードであることを理解しておく必要があります。
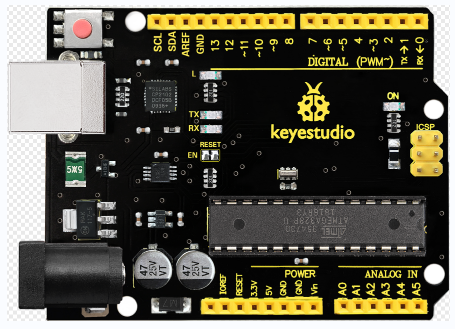
Keyestudio V4.0 開発ボードは ATmega328P MCU をベースにしており、UART-USB変換チップとして CP2102 チップを搭載しています。
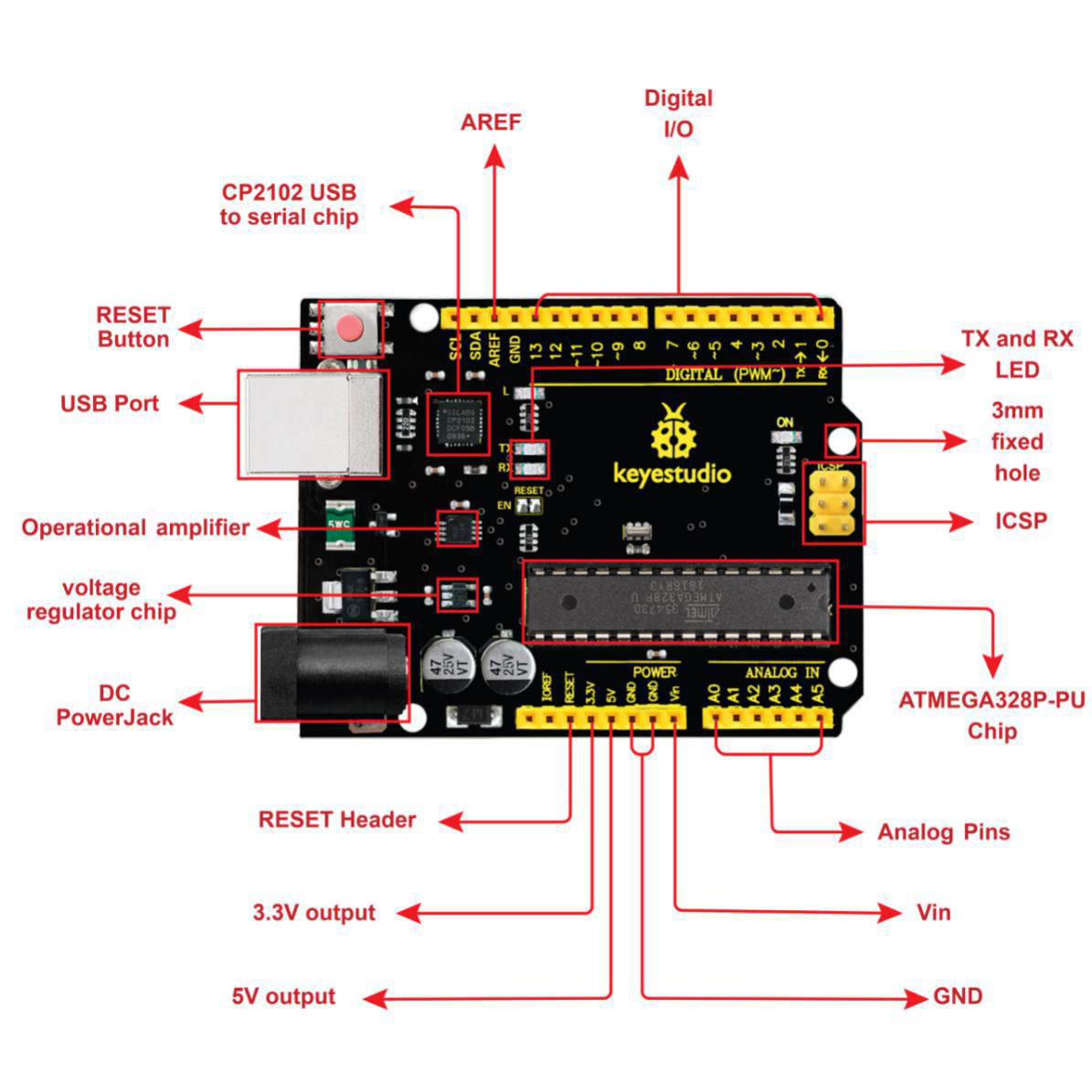
14本のデジタル入出力ピン(うち6本はPWM出力として使用可能)、6本のアナログ入力、16MHz水晶振動子、USB接続、電源ジャック、2つのICSPヘッダー、およびリセットボタンを備えています。
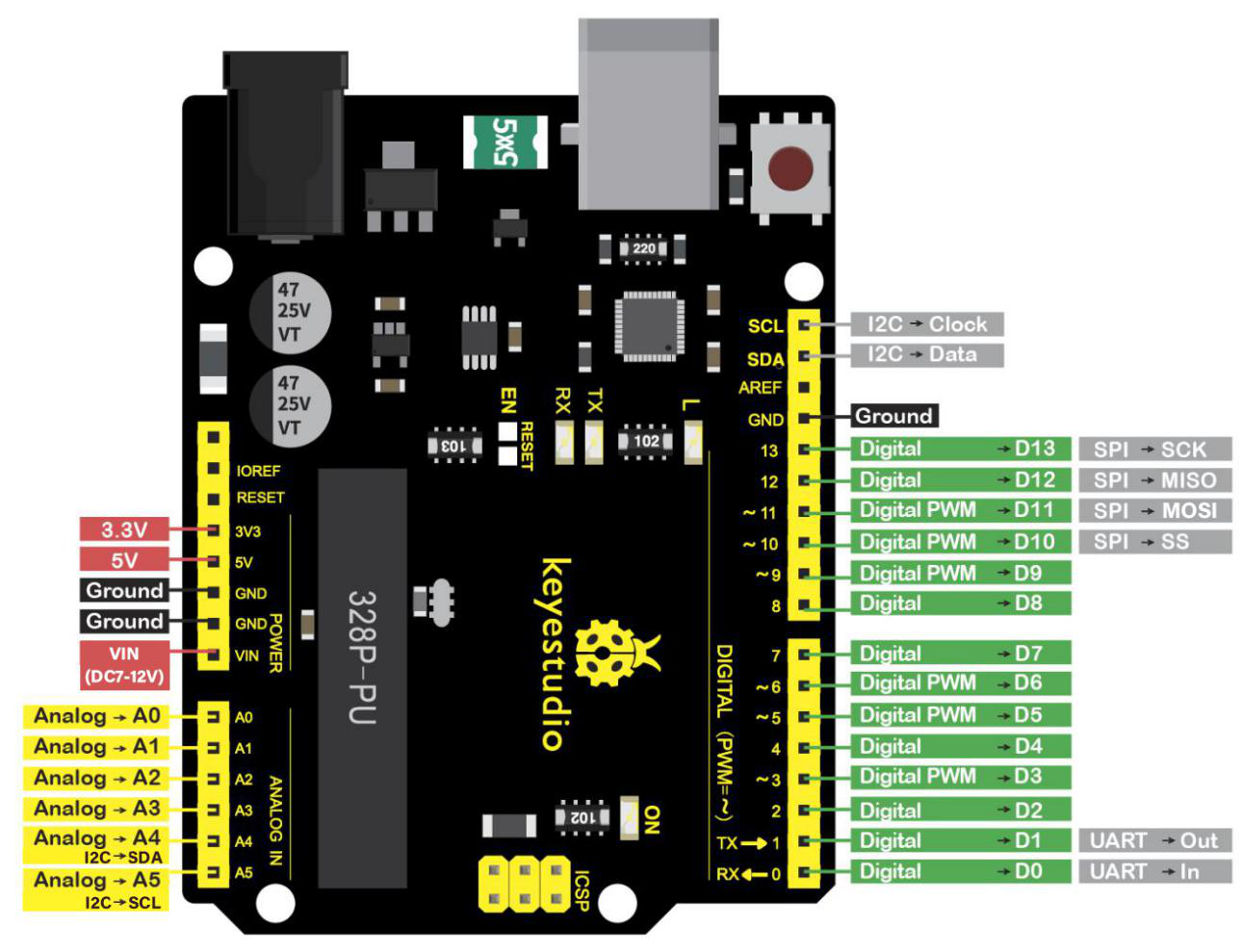
USBケーブル、外部DC電源ジャック(DC 7-12V)、またはメスヘッダー Vin/GND(DC 7-12V)で電力を供給できます。
マイクロコントローラー |
ATmega328P-PU |
|---|---|
動作電圧 |
5V |
入力電圧(推奨) |
DC7-12V |
デジタル I/O ピン |
14 (D0-D13) (うち6本はPWM出力) |
PWM デジタル I/O ピン |
6 (D3, D5, D6, D9, D10, D11) |
アナログ入力ピン |
6 (A0-A5) |
I/O ピンあたりのDC電流 |
20 mA |
3.3V ピンのDC電流 |
50 mA |
フラッシュメモリ |
32 KB (ATmega328P-PU)(うち0.5KBはブートローダーが使用) |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
クロック速度 |
16 MHz |
LED_BUILTIN |
D13 |