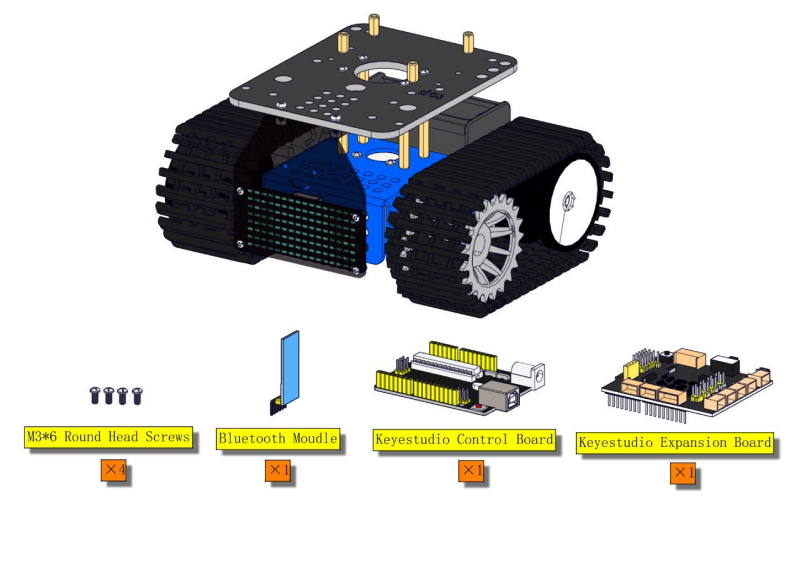
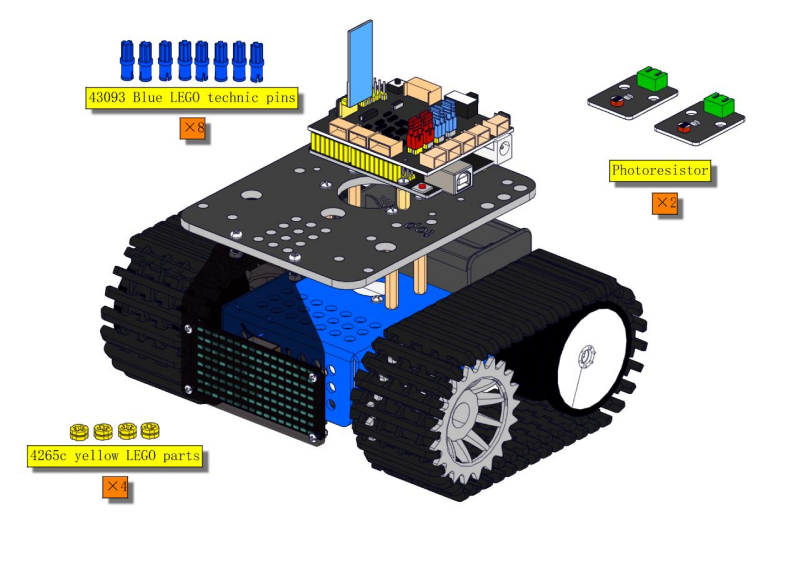
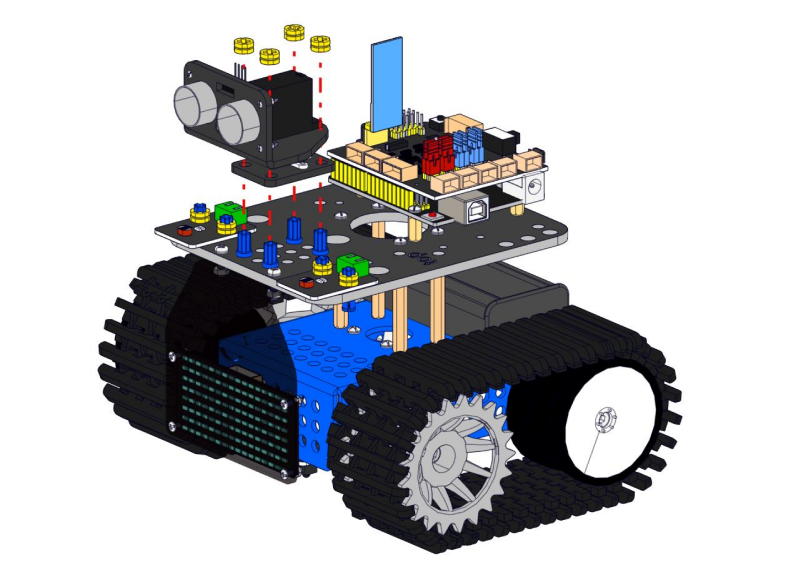
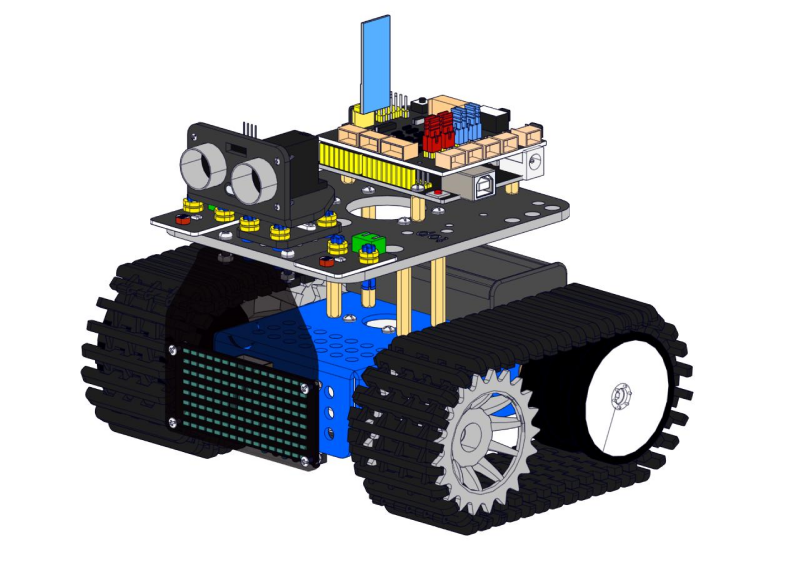
2. 製品の組み立て
注意: このロボットを組み立てる前に、サーボの初期角度を設定し、ボードから薄い保護フィルムを剥がしてください。

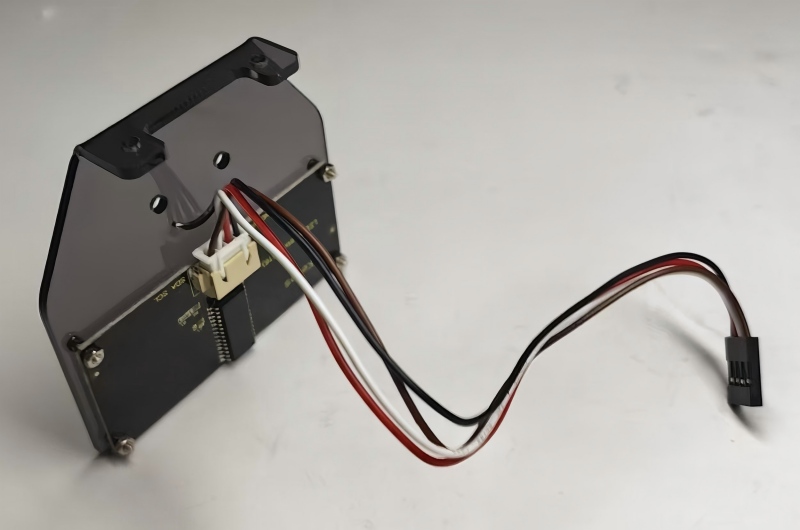
Step1

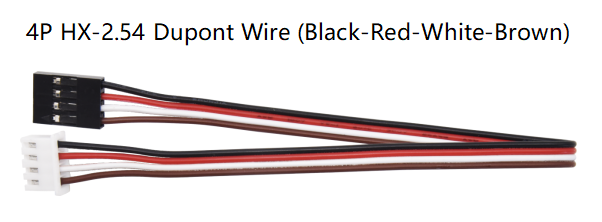
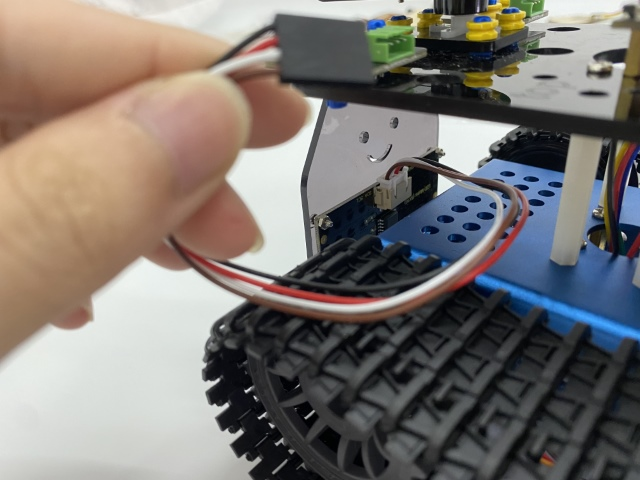
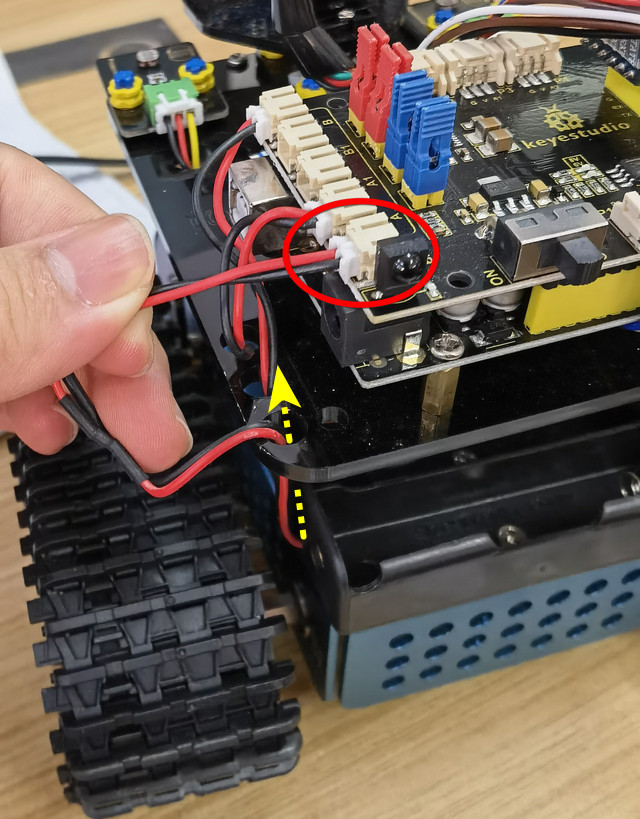
最初に配線してください。
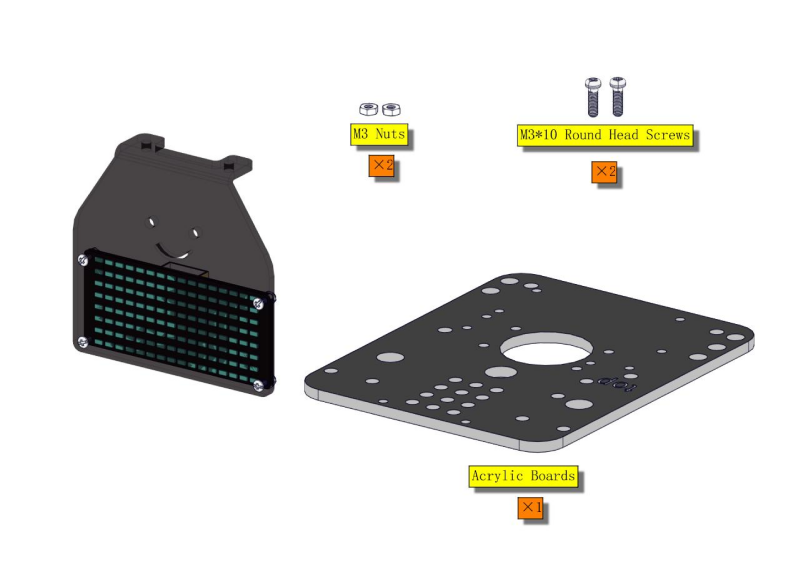
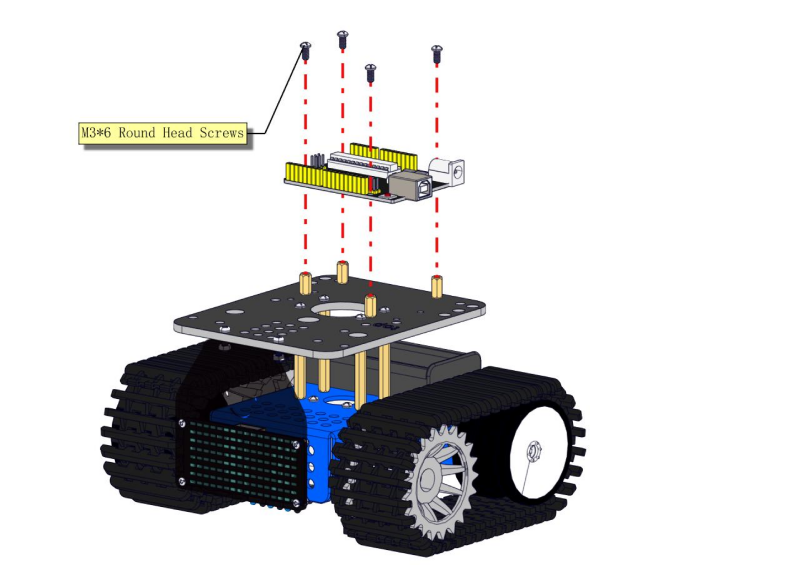
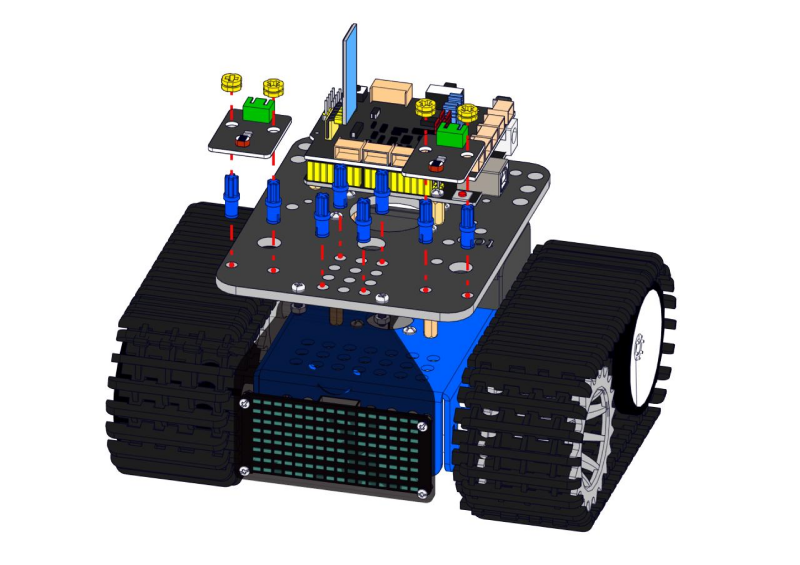
**Step2 **

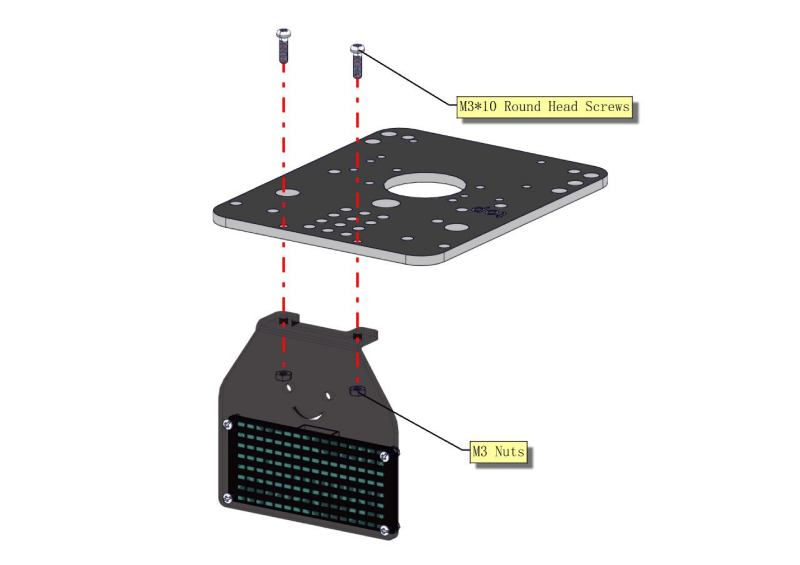
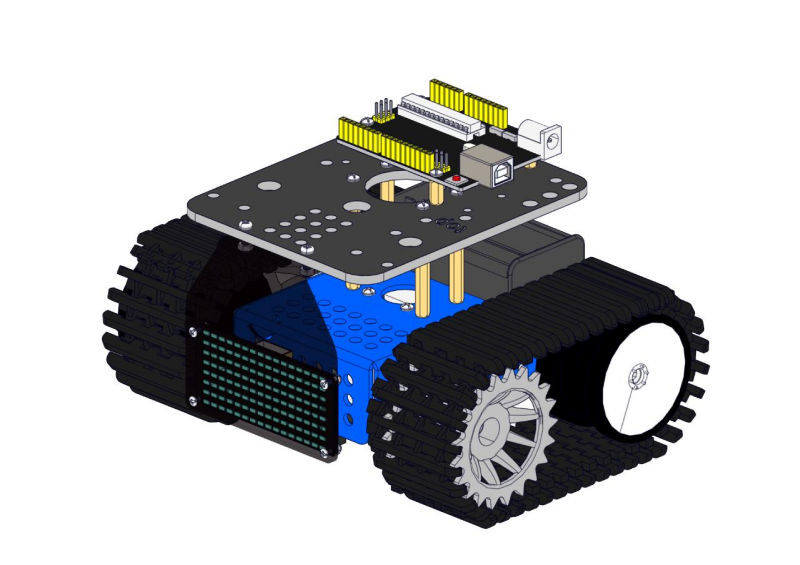
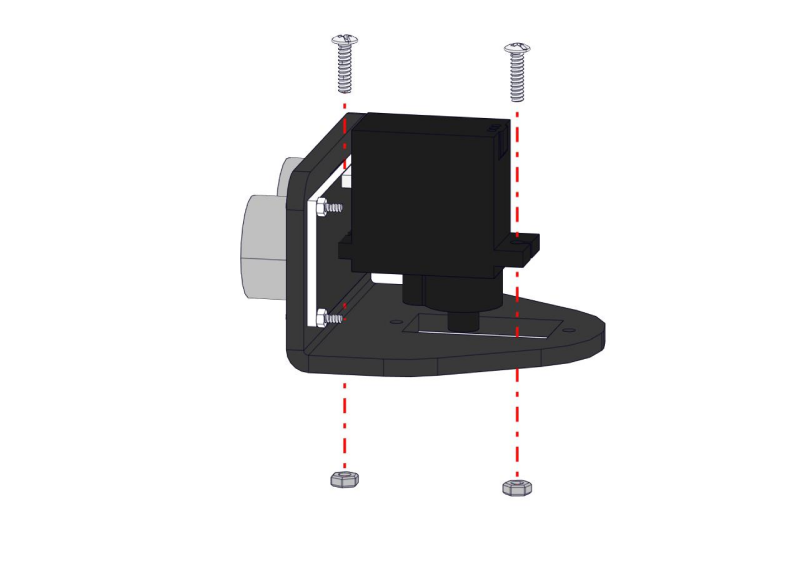
Step 3

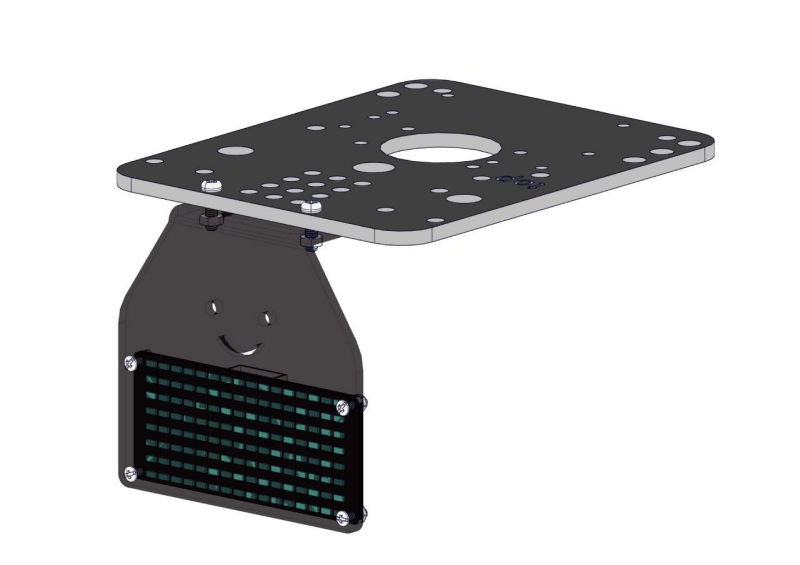
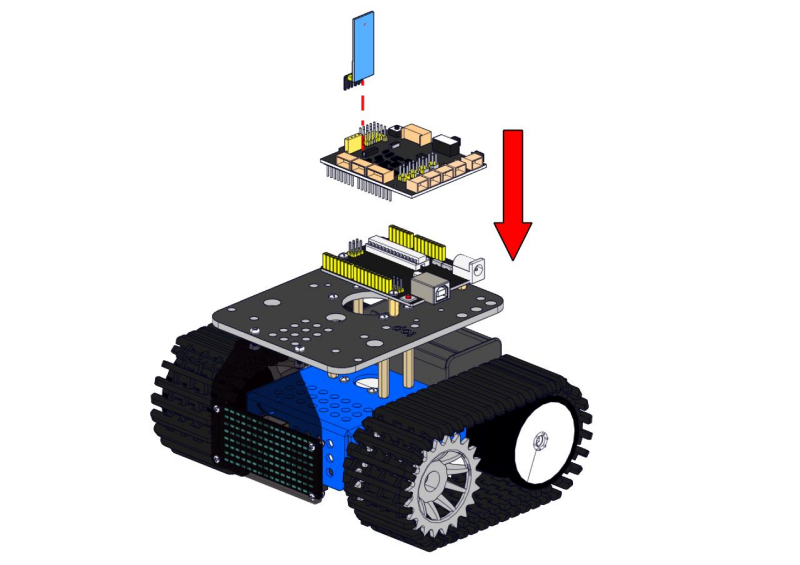
Step 4
Step 5
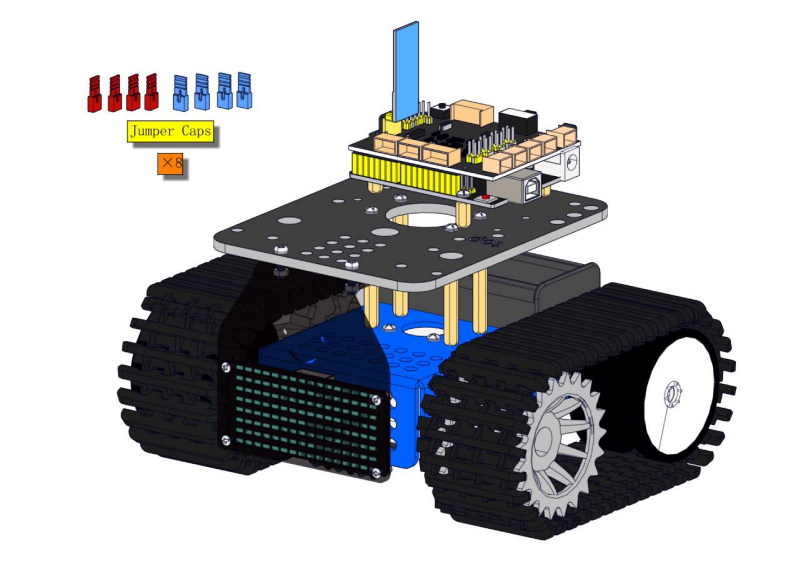
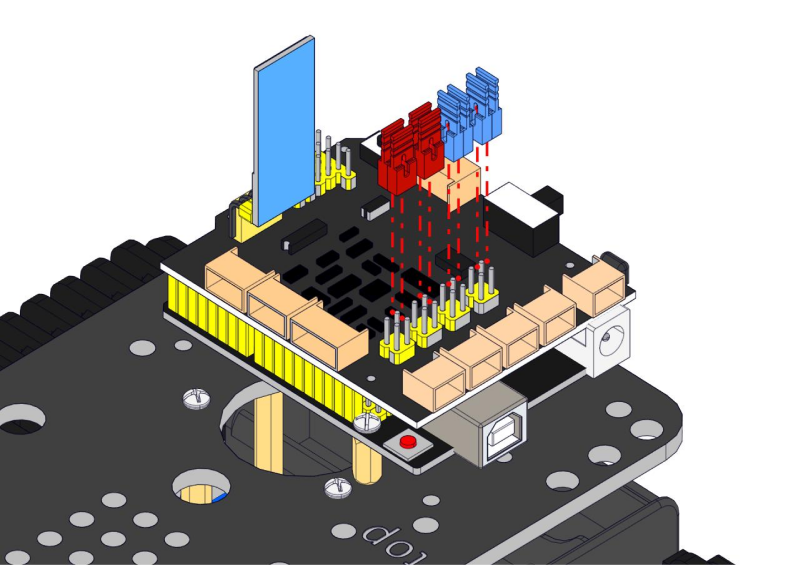
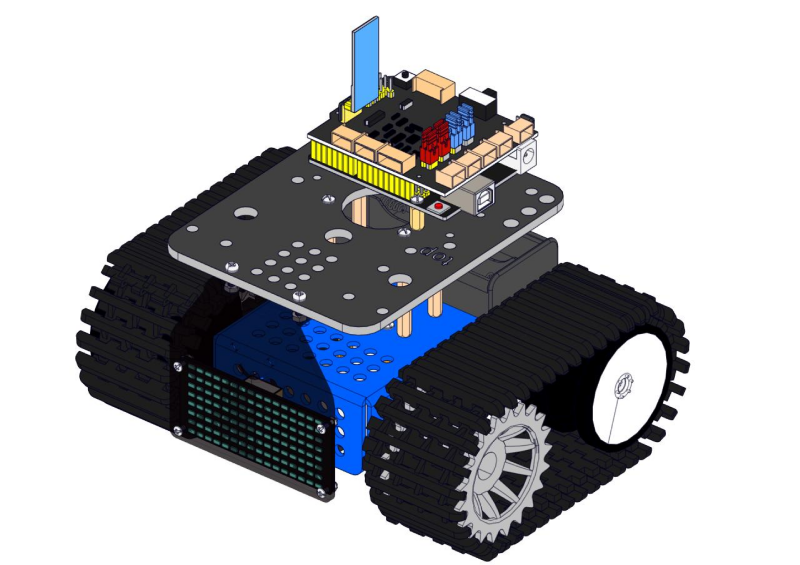
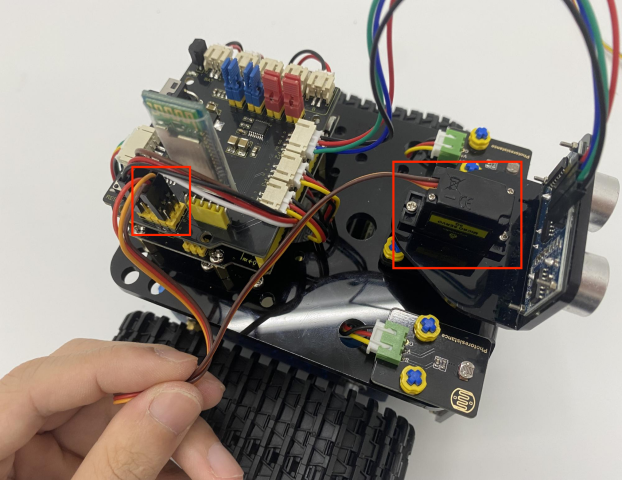
ジャンパーキャップの向きに注意してください。
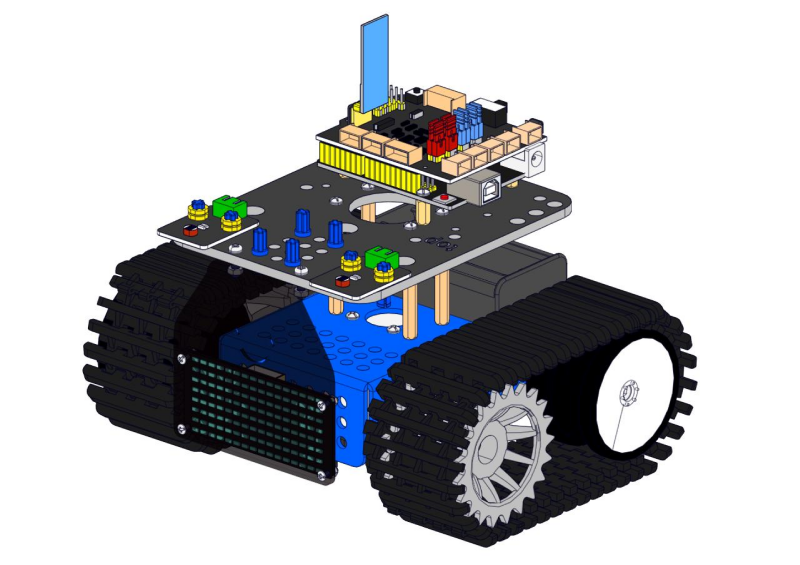
Step 6
Step 7
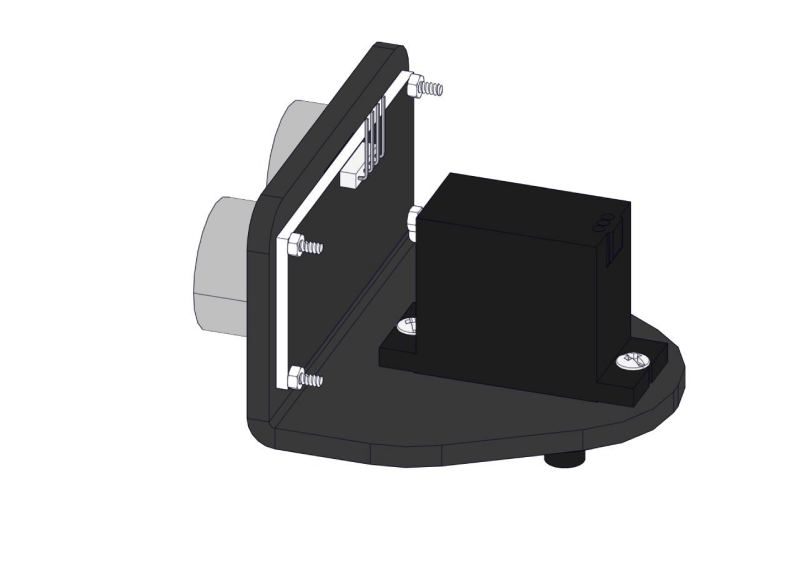
Step 8
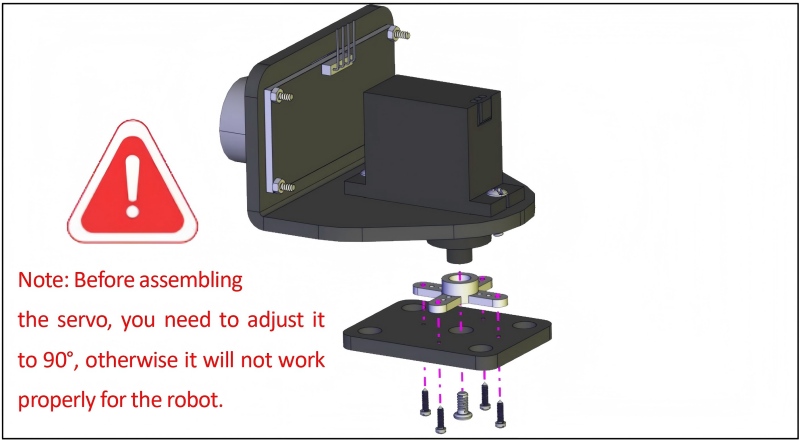
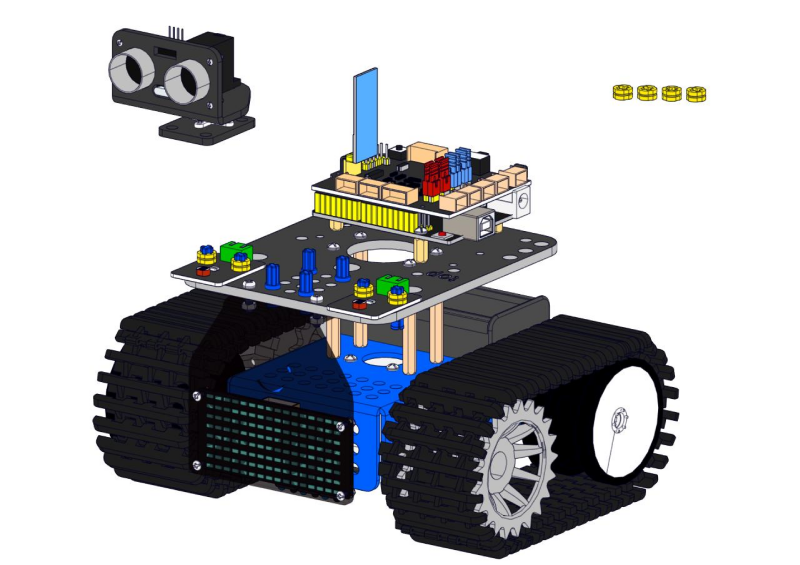
(サーボの角度を調整する必要があります)
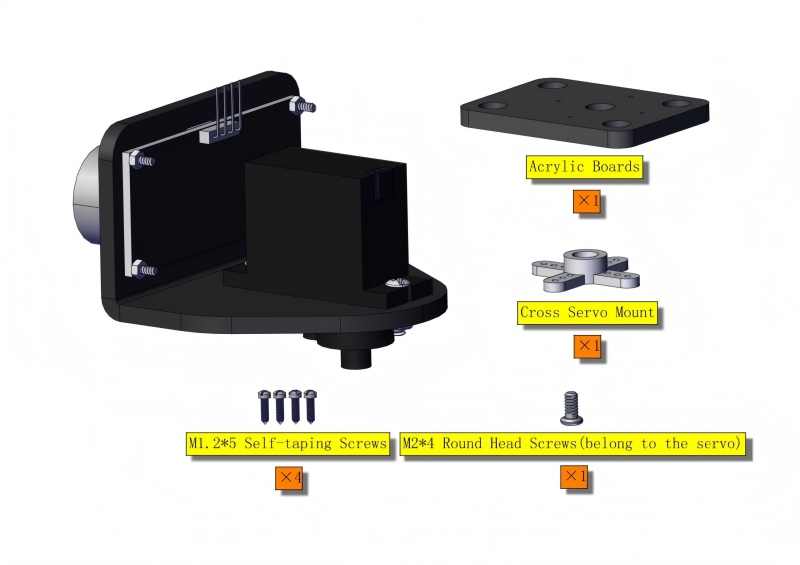
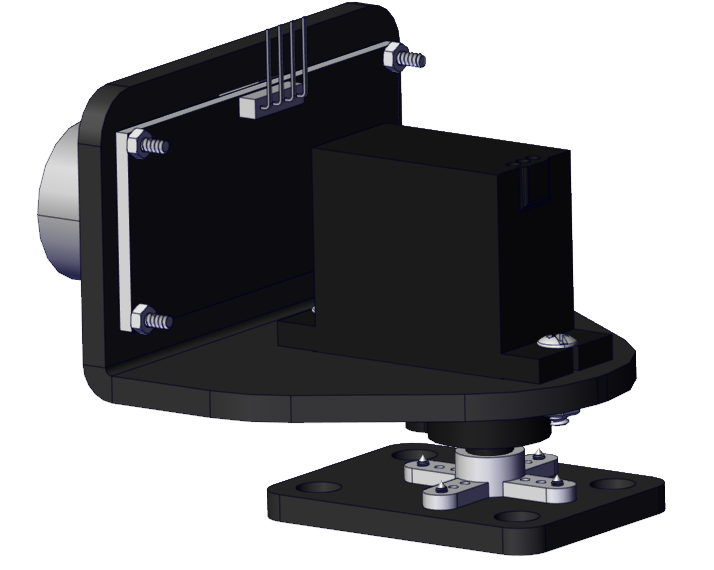
サーボの角度を90°に設定する
サーボのコードを調整するには、コースに従って選択してください。
1.Arduino: コードファイルをダウンロード: Arduino
2.**Kidsblock: **コードファイルをダウンロード: Kidsblock
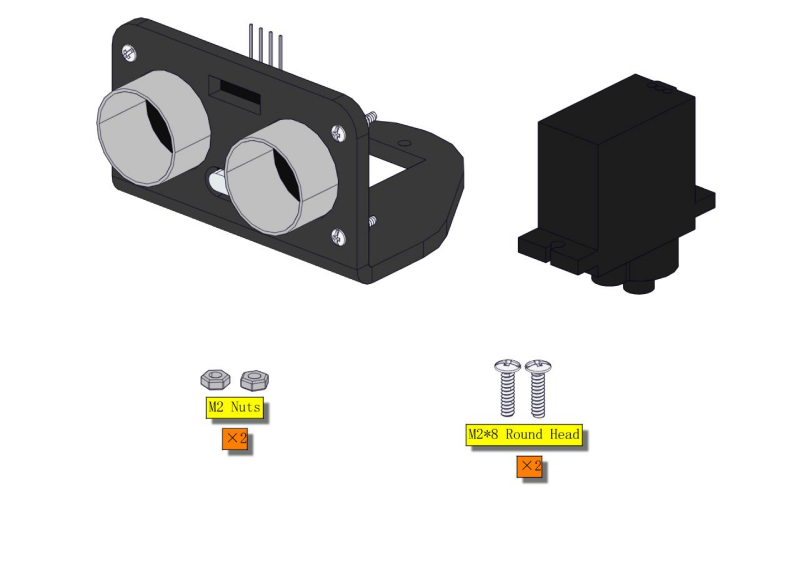
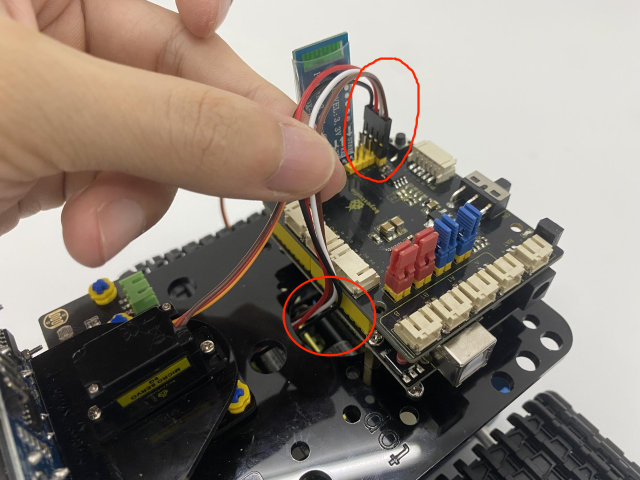
サーボの角度を初期化した後、Bluetoothモジュールを取り付けてください。
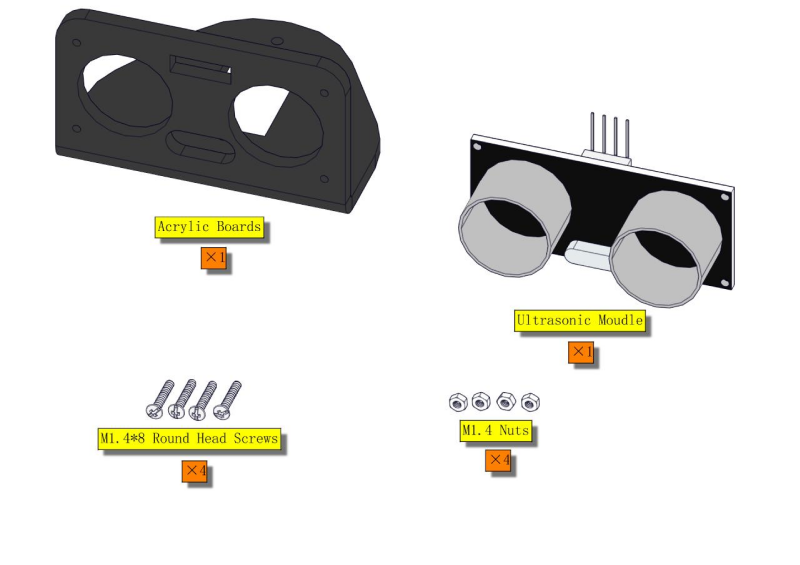
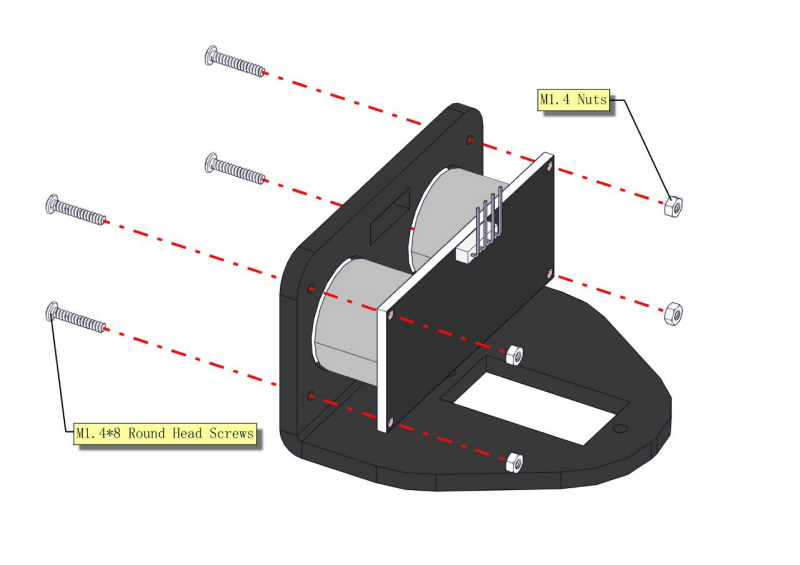
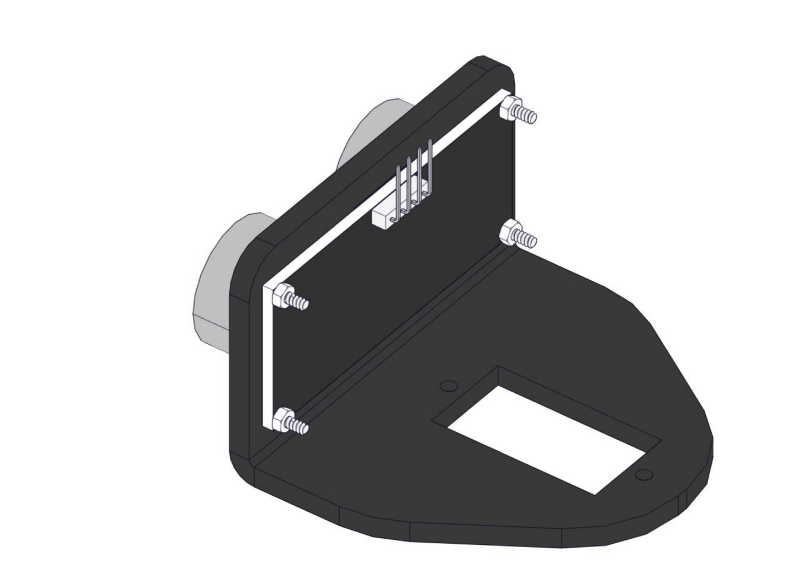
超音波センサーをボードと平行に保ってください。
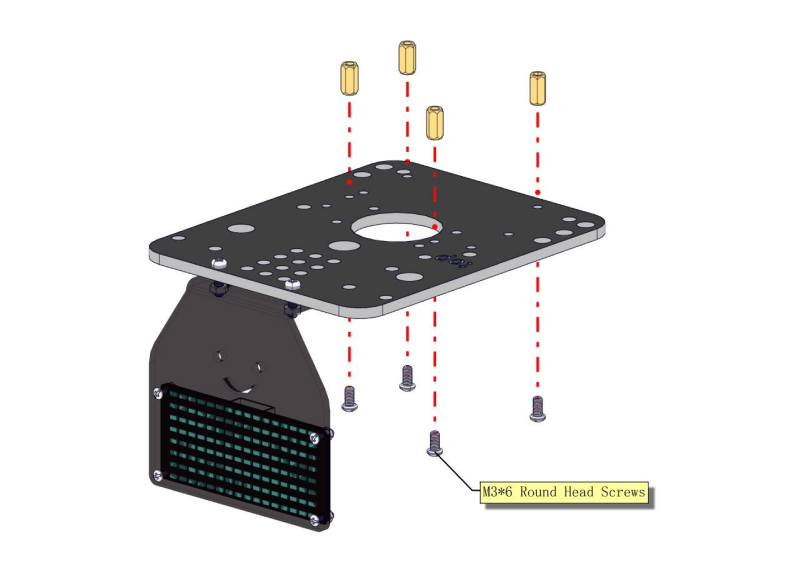
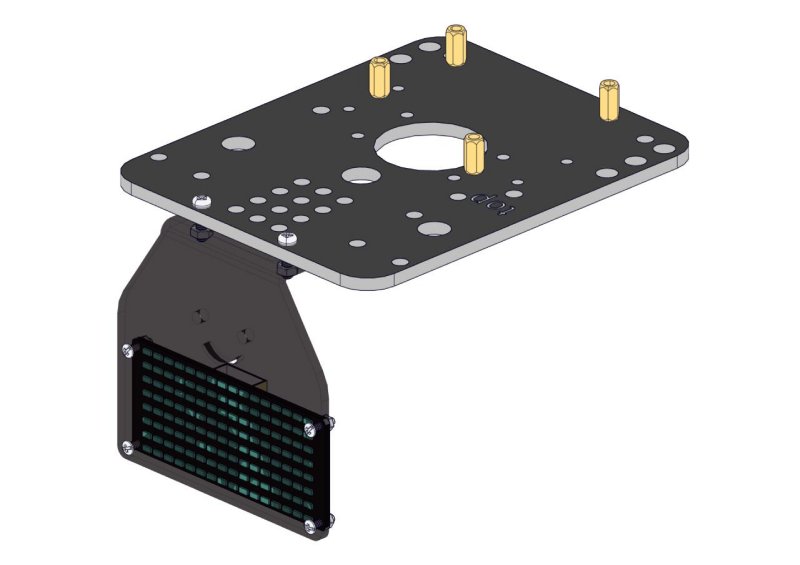
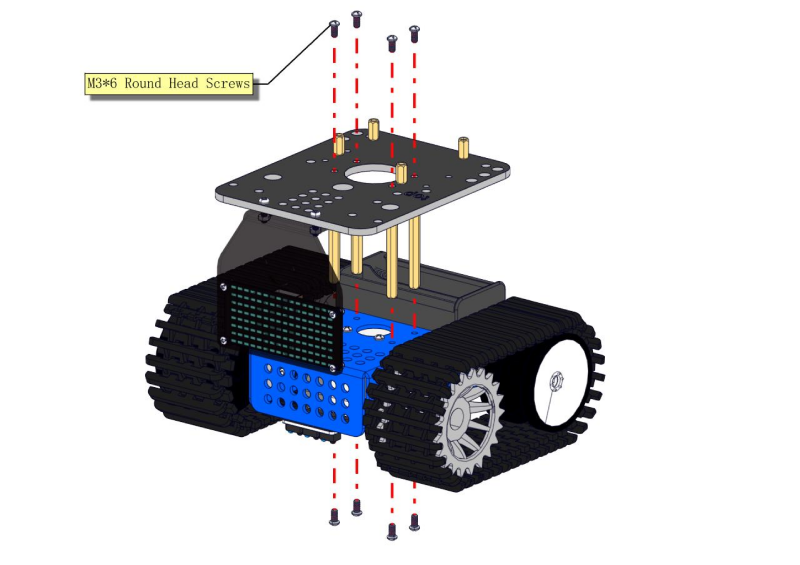
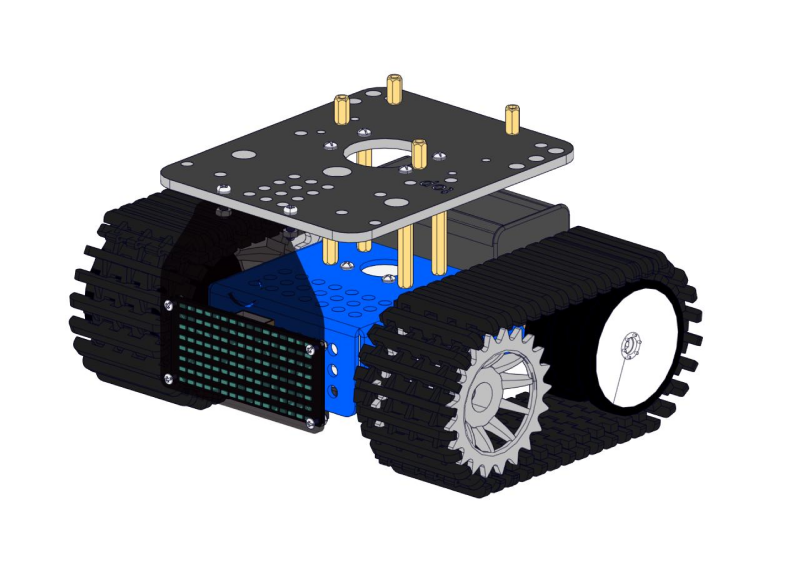
Step 9
Step 10
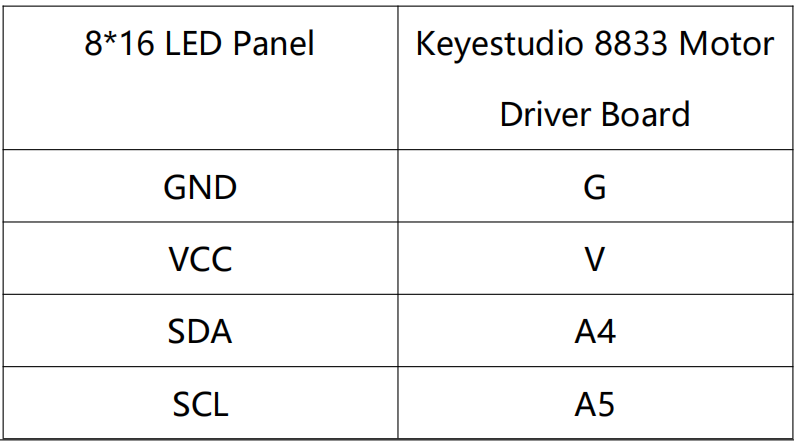
配線
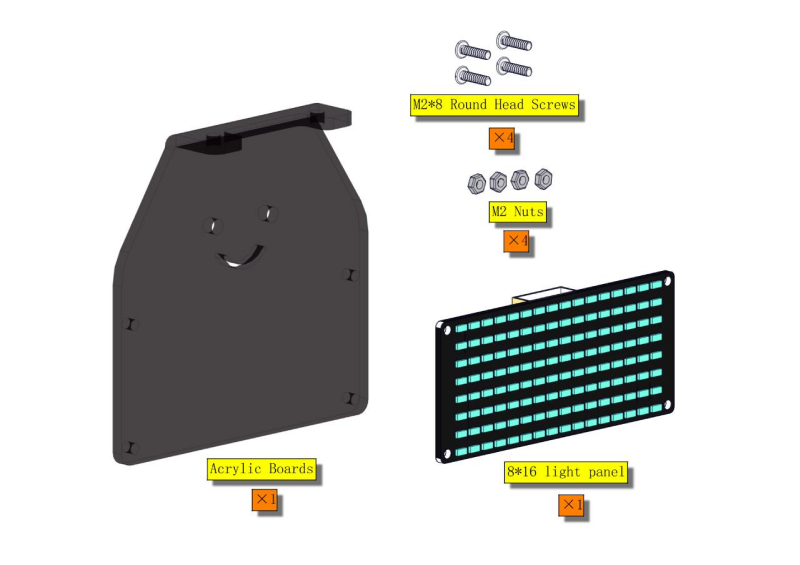
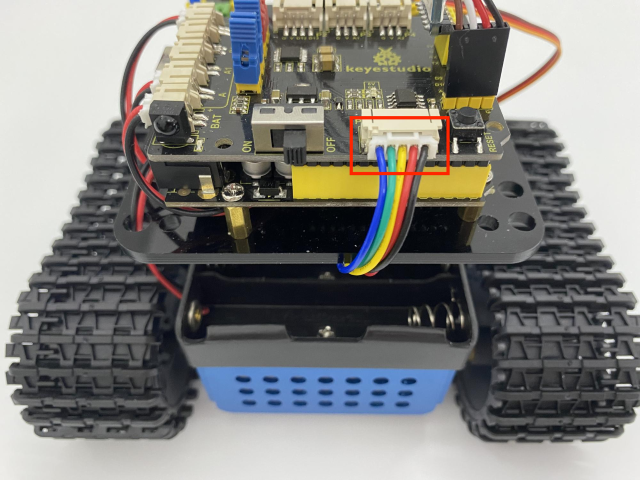
8*16 LEDパネルの配線は、A4とA5に接続してください。
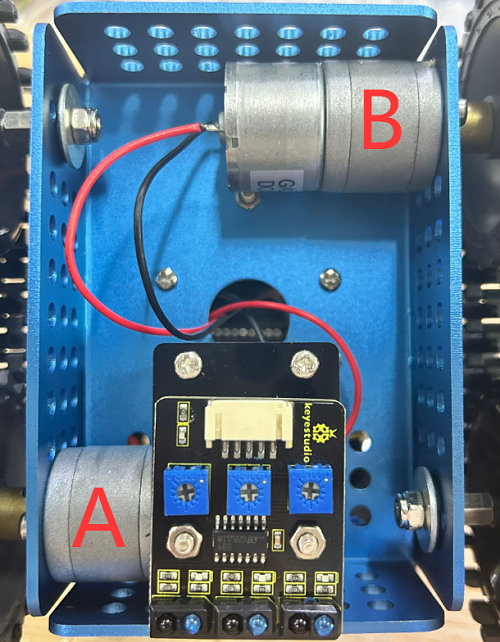
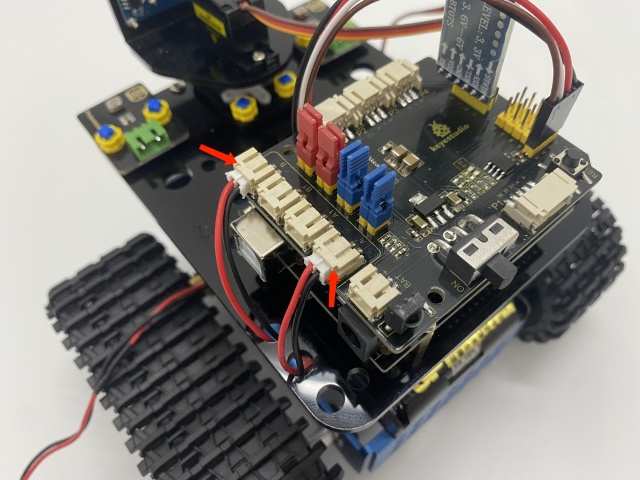
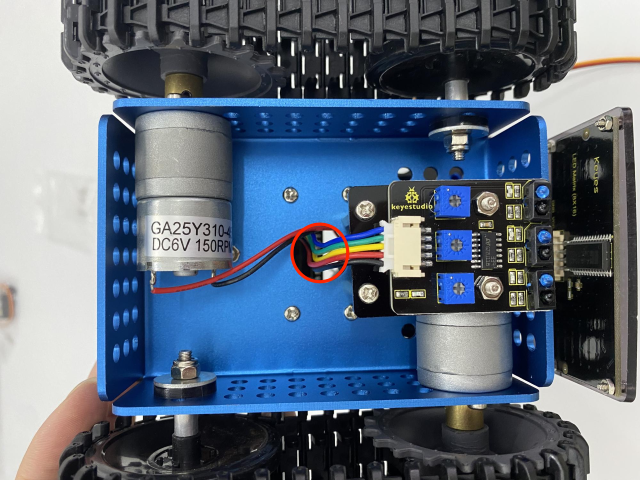
モーターAをAポートに、モーターBをBポートに接続してください。
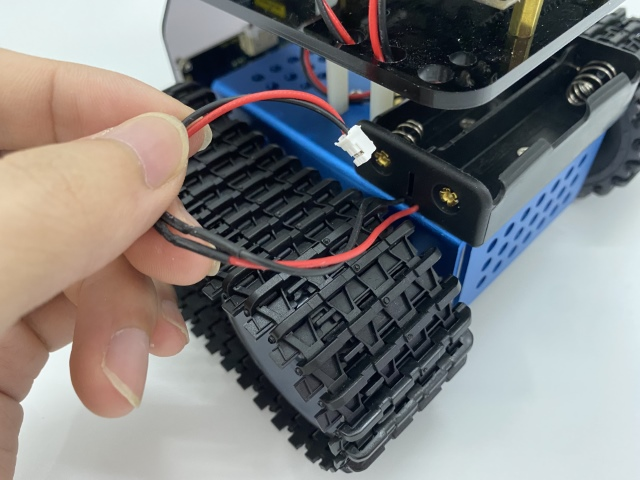
電源ワイヤーを接続してください。
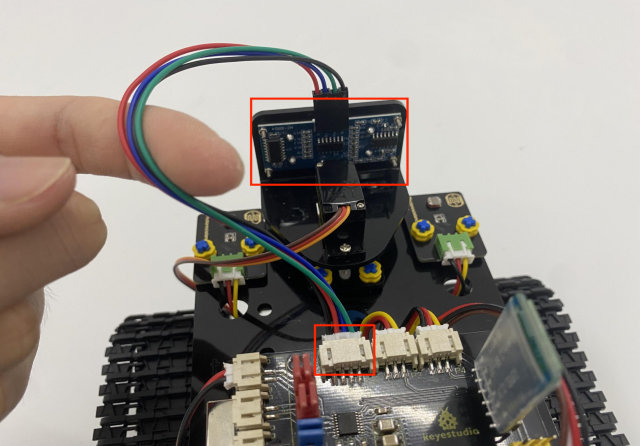
ライントラッキングセンサー(写真を参照)

フォトレジスターの配線
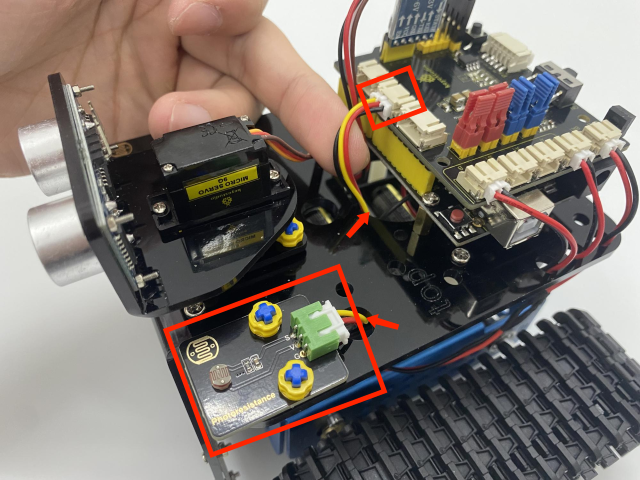
フォトレジスター |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
s |
A1 |
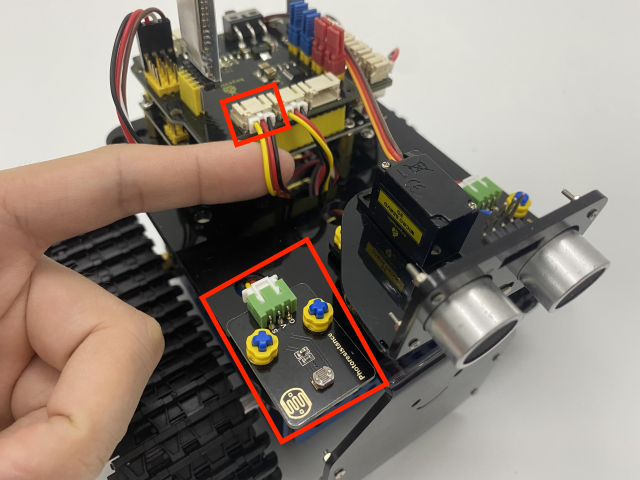
フォトレジスター |
Keyestudio 8833 Board |
|---|---|
G |
G |
V |
V |
S |
V2 |
超音波センサーの配線。

超音波センサー |
Keyestudio 8833 Board |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |
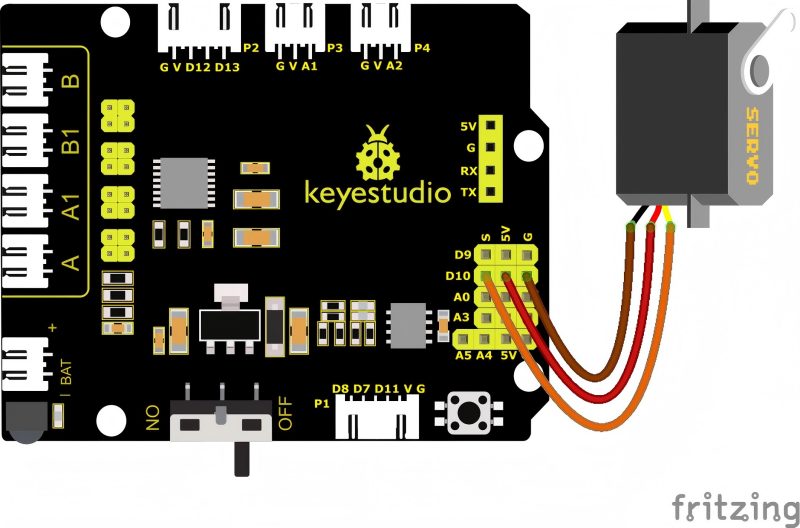
サーボの配線(D10)
サーボ |
Keyestudio 8833 Board |
|---|---|
Brown |
G |
Red |
V(5V) |
Orange |
D10 |
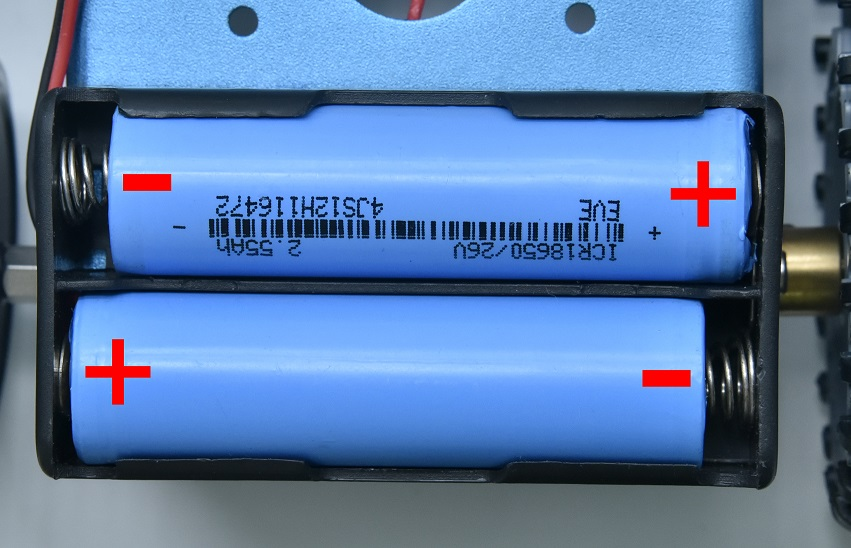
先端が尖った正極を持つ18650型リチウム電池を使用します。電力と容量は特に指定はありません。