Project 33: Ultrasonic Radar
1. Description
We know that bats use echoes to determine the direction and the location of their preys. In real life, sonar is used to detect sounds in the water. Since the attenuation rate of electromagnetic waves in water is very high, it cannot be used to detect signals, however, the attenuation rate of sound waves in the water is much smaller, so sound waves are most commonly used underwater for observation and measurement. In this experiment, we will use a speaker module, an RGB module and a 4-digit tube display to make a device for detection through ultrasonic.
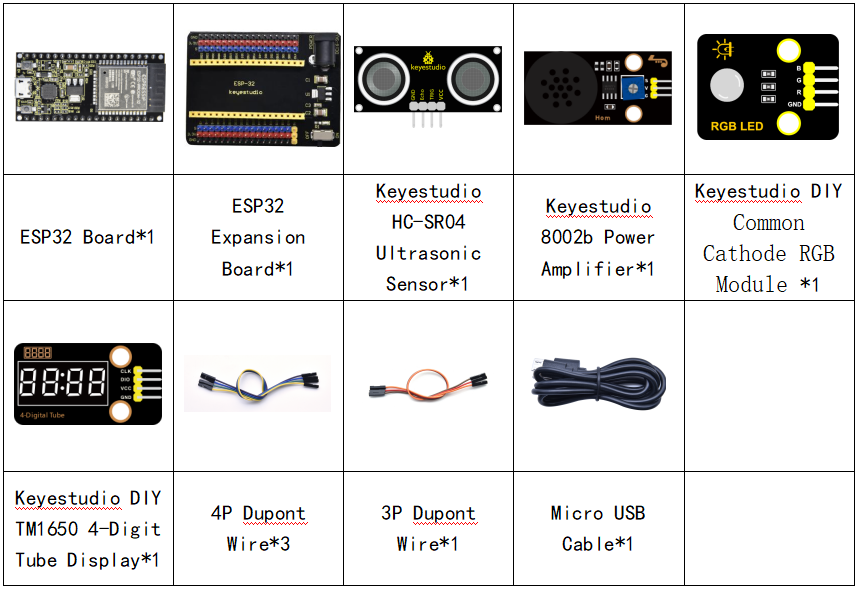
2. Required Components
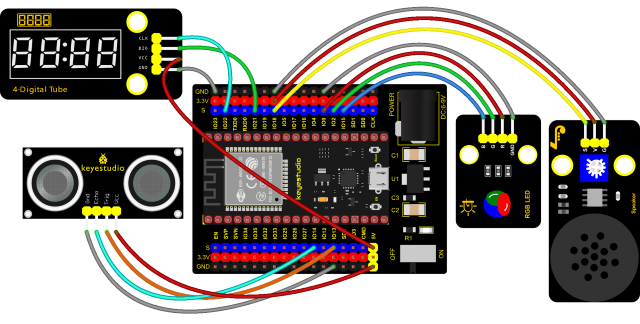
3. Connection Diagram
4. Test Code
from machine import Pin, PWM
import utime
# definitions for TM1650
ADDR_DIS = 0x48 #mode command
ADDR_KEY = 0x49 #read key value command
# definitions for brightness
BRIGHT_DARKEST = 0
BRIGHT_TYPICAL = 2
BRIGHTEST = 7
on = 1
off = 0
# number:0~9
NUM = [0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f]
# DIG = [0x68,0x6a,0x6c,0x6e]
DIG = [0x6e,0x6c,0x6a,0x68]
DOT = [0,0,0,0]
clkPin = 22
dioPin = 21
clk = Pin(clkPin, Pin.OUT)
dio = Pin(dioPin, Pin.OUT)
DisplayCommand = 0
def writeByte(wr_data):
global clk,dio
for i in range(8):
if(wr_data & 0x80 == 0x80):
dio.value(1)
else:
dio.value(0)
clk.value(0)
utime.sleep(0.0001)
clk.value(1)
utime.sleep(0.0001)
clk.value(0)
wr_data <<= 1
return
def start():
global clk,dio
dio.value(1)
clk.value(1)
utime.sleep(0.0001)
dio.value(0)
return
def ack():
global clk,dio
dy = 0
clk.value(0)
utime.sleep(0.0001)
dio = Pin(dioPin, Pin.IN)
while(dio.value() == 1):
utime.sleep(0.0001)
dy += 1
if(dy>5000):
break
clk.value(1)
utime.sleep(0.0001)
clk.value(0)
dio = Pin(dioPin, Pin.OUT)
return
def stop():
global clk,dio
dio.value(0)
clk.value(1)
utime.sleep(0.0001)
dio.value(1)
return
def displayBit(bit, num):
global ADDR_DIS
if(num > 9 and bit > 4):
return
start()
writeByte(ADDR_DIS)
ack()
writeByte(DisplayCommand)
ack()
stop()
start()
writeByte(DIG[bit-1])
ack()
if(DOT[bit-1] == 1):
writeByte(NUM[num] | 0x80)
else:
writeByte(NUM[num])
ack()
stop()
return
def clearBit(bit):
if(bit > 4):
return
start()
writeByte(ADDR_DIS)
ack()
writeByte(DisplayCommand)
ack()
stop()
start()
writeByte(DIG[bit-1])
ack()
writeByte(0x00)
ack()
stop()
return
def setBrightness(b = BRIGHT_TYPICAL):
global DisplayCommand,brightness
DisplayCommand = (DisplayCommand & 0x0f)+(b<<4)
return
def setMode(segment = 0):
global DisplayCommand
DisplayCommand = (DisplayCommand & 0xf7)+(segment<<3)
return
def displayOnOFF(OnOff = 1):
global DisplayCommand
DisplayCommand = (DisplayCommand & 0xfe)+OnOff
return
def displayDot(bit, OnOff):
if(bit > 4):
return
if(OnOff == 1):
DOT[bit-1] = 1;
else:
DOT[bit-1] = 0;
return
def InitDigitalTube():
setBrightness(2)
setMode(0)
displayOnOFF(1)
for _ in range(4):
clearBit(_)
return
def ShowNum(num): #0~9999
displayBit(1,num%10)
if(num < 10):
clearBit(2)
clearBit(3)
clearBit(4)
if(num > 9 and num < 100):
displayBit(2,num//10%10)
clearBit(3)
clearBit(4)
if(num > 99 and num < 1000):
displayBit(2,num//10%10)
displayBit(3,num//100%10)
clearBit(4)
if(num > 999 and num < 10000):
displayBit(2,num//10%10)
displayBit(3,num//100%10)
displayBit(4,num//1000)
pwm_r = PWM(Pin(0))
pwm_g = PWM(Pin(2))
pwm_b = PWM(Pin(15))
pwm_r.freq(1000)
pwm_g.freq(1000)
pwm_b.freq(1000)
def light(red, green, blue):
pwm_r.duty(red)
pwm_g.duty(green)
pwm_b.duty(blue)
# Ultrasonic ranging, unit: cm
def getDistance(trigger, echo):
# Generates a 10us square wave
trigger.value(0) #A short low level is given beforehand to ensure a clean high pulse:
utime.sleep_us(2)
trigger.value(1)
utime.sleep_us(10)#After pulling high, wait 10 microseconds and immediately set it to low
trigger.value(0)
while echo.value() == 0: #Establish a while loop to detect whether the echo pin value is 0 and record the time at that time
start = utime.ticks_us()
while echo.value() == 1: #Establish a while loop to check whether the echo pin value is 1 and record the time at that time
end = utime.ticks_us()
d = (end - start) * 0.0343 / 2 #The travel time of the sound wave x the speed of sound (343.2 m/s, 0.0343 cm/microsecond), and the distance back and forth divided by 2.
return d
# set the pin
trigger = Pin(13, Pin.OUT)
echo = Pin(14, Pin.IN)
buzzer = PWM(Pin(18))
def playtone(frequency):
buzzer.duty(1000)
buzzer.freq(frequency)
def bequiet():
buzzer.duty(0)
# main program
InitDigitalTube()
while True:
distance = int(getDistance(trigger, echo))
ShowNum(distance)
if distance <= 10:
playtone(880)
utime.sleep(0.1)
bequiet()
light(1023, 0, 0)
elif distance <= 20:
playtone(532)
utime.sleep(0.2)
bequiet()
light(0, 0, 1023)
else:
light(0, 1023, 0)
5. Code Explanation
We set sound frequency and light color by adjusting different distance range.
We can adjust the distance range in the code.
6. Test Result
Connect the wires according to the experimental wiring diagram and power on. Click  “Run current script”, the code starts executing. When the ultrasonic sensor detects different distances(within 20 cm), the buzzer will produce different frequencies of sound, the RGB will show different colors, and the measured distances are displayed on the 4-digit tube display. Press “Ctrl+C”or click
“Run current script”, the code starts executing. When the ultrasonic sensor detects different distances(within 20 cm), the buzzer will produce different frequencies of sound, the RGB will show different colors, and the measured distances are displayed on the 4-digit tube display. Press “Ctrl+C”or click  “Stop/Restart backend”to exit the program.
“Stop/Restart backend”to exit the program.