4.6 Body Detection
4.6.1 Algorithm
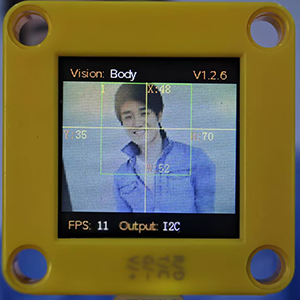
It determines whether there is a person in the image according to the outlines of the head and shoulders. If yes, it returns its coordinates and size.
4.6.2 Returned Values
When the controller acquires the recognition result, the algorithm will return the followings:
Parameter |
Definition |
|---|---|
kXValue |
Central coordinate x |
kYValue |
Central coordinate y |
kWidthValue |
Width w |
kHeightValue |
Height h |
4.6.3Tips of Body Algorithm
Compared with a human facing from the side and back, the detection results will be more accurate when the person faces Sengo1 head-on.
The detection results will be more accurate when the color of the background is simple and obviously difference from that of the body dress.
4.6.4 Test Code
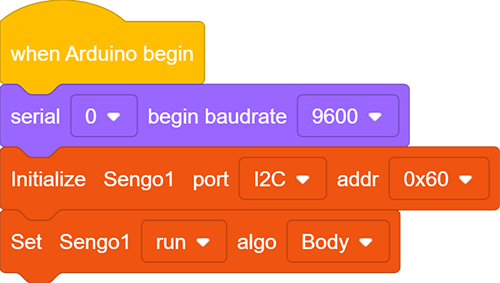
In the code start-up, set the serial port baud rate to
9600, and then set the communication mode of the AI vision module toI2C, and finally set it to run inBody.
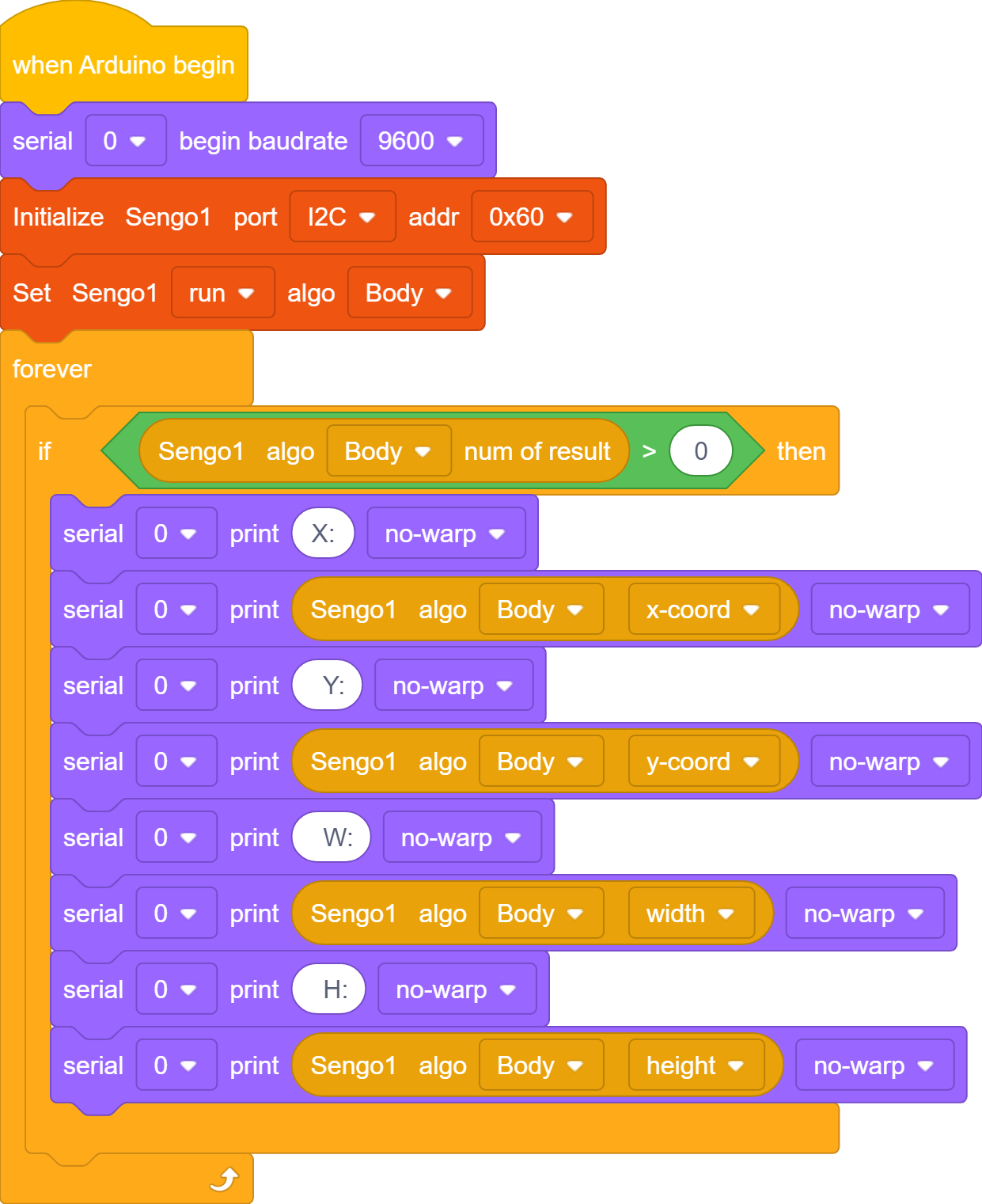
The if block determines the number of detections. Only when the number of detections is greater than 0 will the data be output. Note to choose
Body.
Complete code:
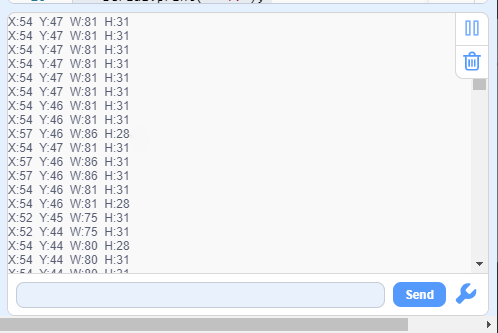
4.6.5 Test Result
After uploading the code, the AI vision module will scan the area captured by the camera. If there is a human body, it will be recognized and its coordinates, width and height will be printed on the monitor.