Proyecto 28: Contenedor Inteligente

Descripción
El contenedor inteligente no solo tiene las funciones básicas de los cubos de basura tradicionales, sino que también integra una variedad de tecnologías inteligentes, lo que aporta mucha comodidad a nuestras vidas.
En este proyecto, hacemos un contenedor inteligente con la placa de desarrollo UNO R3 (ch340), un sensor ultrasónico y un servo. Cuando alguien está cerca del contenedor, la tapa se abrirá automáticamente; cuando las personas se alejan, la tapa se cierra automáticamente.
Hardware
Placa de desarrollo UNO R3 (ch340) x1
Sensor ultrasónico HC-SR04 x1
Servo SG90 x1
Cables DuPont
Cables jumper
Principio de Funcionamiento
El sensor ultrasónico HC-SR04 calcula la distancia al objeto transmitiendo y recibiendo ondas ultrasónicas. Cuando se detecta una persona, el servo controla la apertura de la tapa. Cuando la persona se aleja, la tapa se cierra.

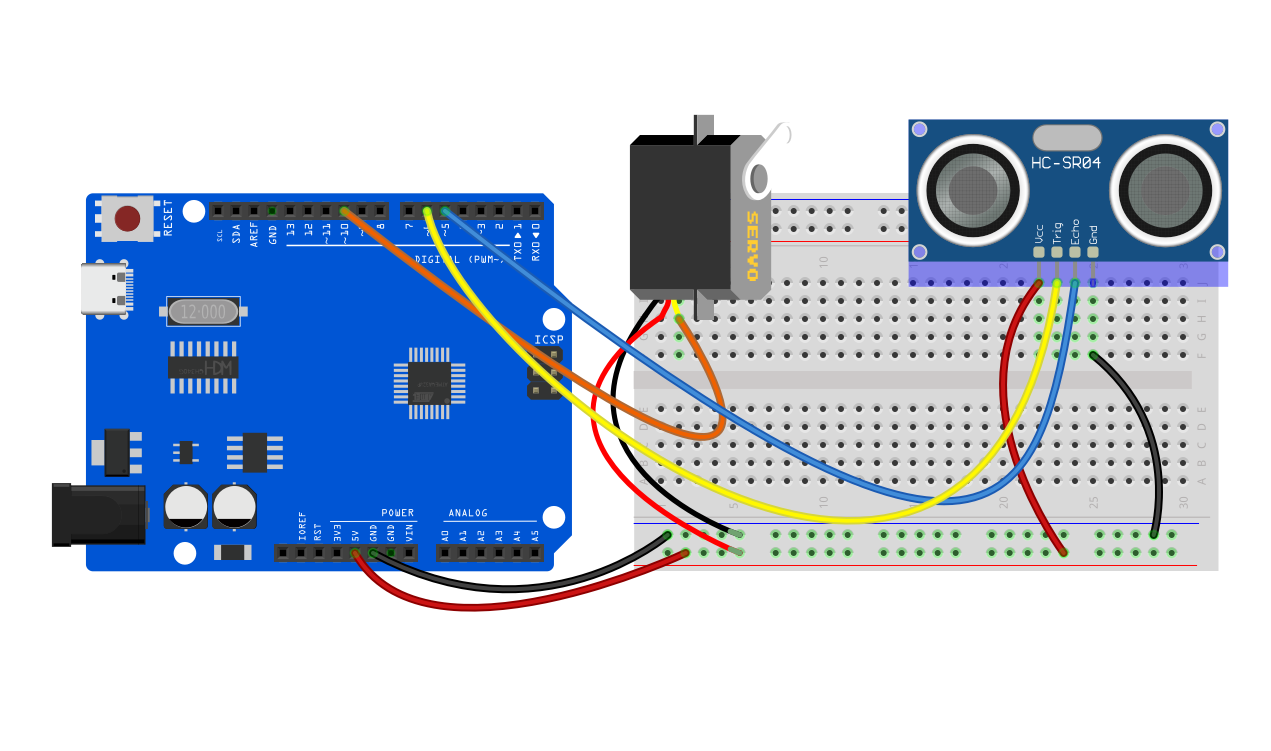
Diagrama de Conexiones
Conectar el pin Trig del HC-SR04 al pin digital D6, el pin Echo al pin digital D5.
Conectar el cable amarillo (señal) del servo al pin digital D10 en la placa.
Código de Ejemplo
/*
Electronics Learning Starter Kit for Arduino
Project 28
Smart Bin
Edit By Keyes
*/
#include <Servo.h>
const int trigPin = 6; // Ultrasonic sensor Trig pin
const int echoPin = 5; // Ultrasonic sensor Echo pin
const int servoPin = 10; // Servo motor pin
Servo myservo; // Create a servo object
void setup() {
pinMode(trigPin, OUTPUT); // Set Trig pin as output
pinMode(echoPin, INPUT); // Set Echo pin as input
myservo.attach(servoPin); // Attach servo motor to pin 10
myservo.write(0); // Initialize servo to 0 degrees
Serial.begin(9600); // Initialize serial communication with a baud rate of 9600
}
void loop() {
long duration, distance;
// Send a 10-microsecond high pulse to trigger the ultrasonic sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the high pulse duration from the Echo pin
duration = pulseIn(echoPin, HIGH);
// Calculate distance (in centimeters)
distance = duration * 0.034 / 2;
// Print the distance value to the serial monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
if (distance < 20) { // If the distance is less than 20 cm, open the lid
myservo.write(180);
delay(3000); // Keep it open for 3 seconds
} else { // If the distance is greater than 20 cm, close the lid
myservo.write(0);
}
delay(100); // Delay for 100 milliseconds
}
Explicación del Código
Inclusión de la Biblioteca:
#include <Servo.h>
Esto incluye la biblioteca Servo de Arduino, que se usa para controlar el motor servo.
Definición de Pines y Creación de Objeto:
const int trigPin = 6; // Pin Trig para el sensor ultrasónico
const int echoPin = 5; // Pin Echo para el sensor ultrasónico
const int servoPin = 10; // Pin para el motor servo
Servo myservo; // Crear un objeto servo
Define los pines Trig y Echo para el sensor ultrasónico y el pin para la conexión del motor servo. También crea un objeto servo para control posterior.
Configuración Inicial:
void setup() {
pinMode(trigPin, OUTPUT); // Configurar el pin Trig como salida
pinMode(echoPin, INPUT); // Configurar el pin Echo como entrada
myservo.attach(servoPin); // Conectar el servo al pin digital 10
myservo.write(0); // Establecer la posición inicial del servo a 0 grados (posición cerrada)
Serial.begin(9600); // Inicializar comunicación serial a 9600 baudios
}
Configura los modos de los pines para el sensor ultrasónico, conecta el servo y establece su posición inicial. También inicia la comunicación serial para depuración y monitoreo de datos del sensor.
Función Principal Loop:
void loop() {
// ... (continuación como arriba)
}
En el loop principal, se lee continuamente el sensor ultrasónico y se controla la acción del servo según la distancia.
Disparo y Lectura del Sensor Ultrasónico:
// Enviar un pulso alto de 10 microsegundos para activar el sensor ultrasónico
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Leer la duración del pulso alto en el pin Echo
duration = pulseIn(echoPin, HIGH);
Envía una señal de pulso específica para activar el sensor ultrasónico, luego usa la función pulseIn para medir la duración del pulso alto en el pin Echo.
Cálculo de la Distancia:
// Calcular la distancia (en centímetros)
distance = duration * 0.034 / 2;
Calcula la distancia desde el sensor hasta un objeto basado en el principio de los sensores ultrasónicos. El sonido viaja en el aire a aproximadamente 340 metros por segundo, o 0.034 centímetros por microsegundo. Como el sonido debe ir y volver, el resultado se divide por dos.
Salida Serial de la Distancia:
// Imprimir la distancia en el monitor serial
Serial.print("Detected Distance: ");
Serial.print(distance);
Serial.println(" cm");
Envía la distancia calculada al monitor serial, que puede verse en el IDE de Arduino.
Control del Motor Servo:
if (distance < 20) { // Si la distancia es menor a 20 cm, abrir la tapa del contenedor
myservo.write(180); // Girar el servo a 180 grados (posición abierta)
delay(3000); // Mantenerla abierta por 3 segundos
} else { // Si la distancia es 20 cm o mayor, cerrar la tapa del contenedor
myservo.write(0); // Girar el servo a 0 grados (posición cerrada)
}
Determina si alguien está cerca basado en la distancia. Si la distancia detectada es menor a 20 centímetros, asume que alguien se acerca y abre la tapa del contenedor, manteniéndola abierta por 3 segundos; de lo contrario, el servo mantiene la posición cerrada.
Retraso en el Loop:
delay(100); // Retraso de 100 milisegundos para controlar la frecuencia del loop
Retrasa el loop 100 milisegundos para evitar que el ciclo se ejecute demasiado rápido y consuma recursos excesivos.
Resultado del Proyecto
Cuando alguien está cerca del contenedor (a menos de 20 cm), la tapa se abrirá automáticamente durante 3 segundos.
Cuando las personas se alejan (la distancia es mayor o igual a 20 cm), la tapa se cierra automáticamente para mantener el ambiente limpio.