Proyecto 31: Módulo MPU6050
Descripción
El MPU6050 es un potente dispositivo de seguimiento de movimiento de 6 ejes que combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes en el mismo chip de silicio. Se utiliza ampliamente en drones, robots de equilibrio y dispositivos controlados por movimiento. En este proyecto, aprenderemos cómo leer los datos de aceleración y rotación del módulo MPU6050 utilizando el protocolo de comunicación I2C.
Hardware
Placa de desarrollo UNO R3 (ch340) x1
Módulo MPU6050 x1
Protoboard x1
Cables jumper
Principio de Funcionamiento
El MPU6050 consta de dos sensores principales:
Acelerómetro: Mide las fuerzas de aceleración que actúan sobre el sensor en los ejes X, Y y Z. Esto puede usarse para determinar el ángulo de inclinación del sensor con respecto a la gravedad terrestre.
Giroscopio: Mide la velocidad de rotación alrededor de los ejes X, Y y Z. Esto ayuda a rastrear la orientación y el movimiento rotacional.
El módulo se comunica con el Arduino a través del protocolo I2C (Inter-Integrated Circuit), que solo requiere dos líneas de datos: SDA (Datos Seriales) y SCL (Reloj Serial). El Arduino solicita datos de los registros internos del MPU6050, y el módulo envía los valores crudos del sensor.
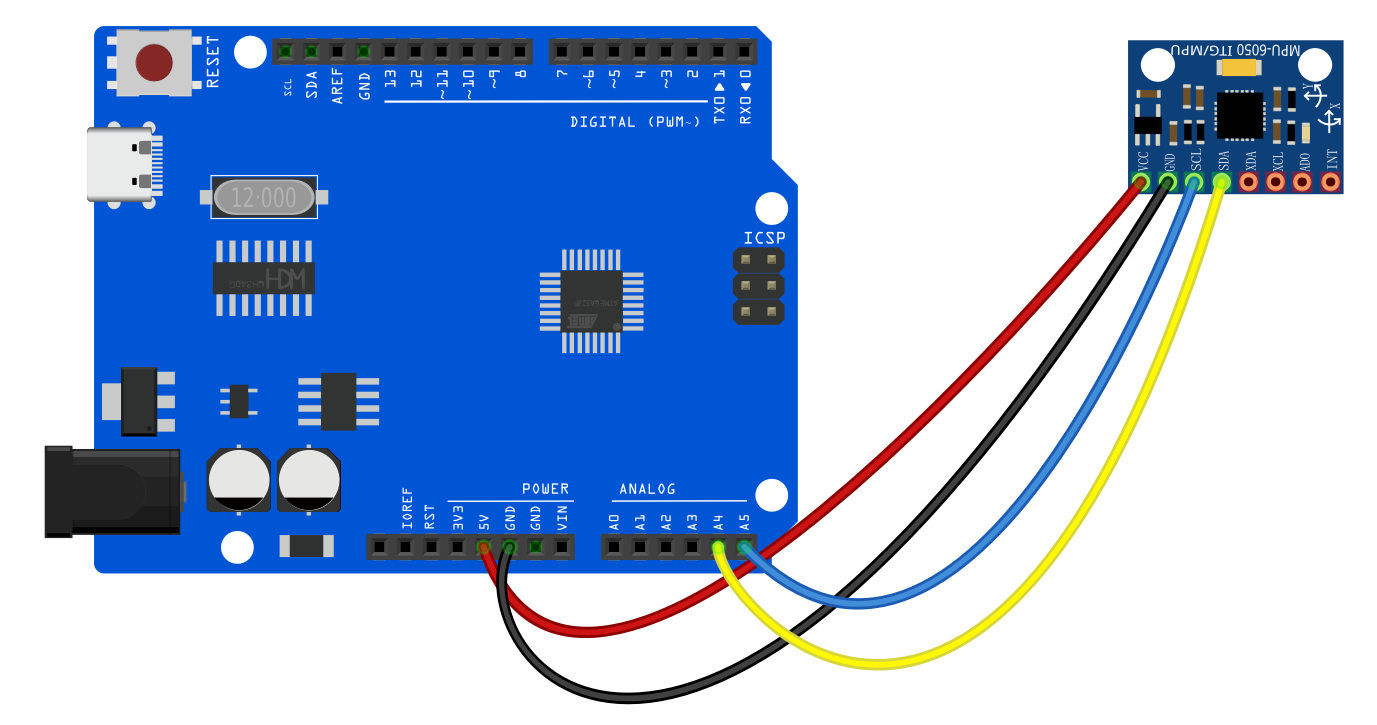
Diagrama de Conexiones
Conectar VCC del MPU6050 a 5V en la placa.
Conectar GND del MPU6050 a GND en la placa.
Conectar SCL del MPU6050 a A5 (o pin SCL) en la placa.
Conectar SDA del MPU6050 a A4 (o pin SDA) en la placa.
Código de Ejemplo
/*
Electronics Learning Starter Kit for Arduino
Project 31
MPU6050 Module
Edit By Keyes
*/
#include <Wire.h>
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53); // equation for temperature in degrees C from datasheet
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
delay(500);
}
Explicación del Código
Inicialización de I2C:
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
La librería Wire se usa para la comunicación I2C. Primero activamos el MPU6050 escribiendo 0 en su registro de gestión de energía (0x6B).
Lectura de Datos:
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
Indicamos al MPU6050 que queremos comenzar a leer desde el registro 0x3B (que contiene el byte alto de la aceleración en el eje X). Luego solicitamos un total de 14 bytes, que cubren la aceleración en 3 ejes, la temperatura y los datos del giroscopio en 3 ejes (cada valor ocupa 2 bytes).
Combinación de Bytes:
AcX=Wire.read()<<8|Wire.read();
Como cada lectura del sensor es de 16 bits (2 bytes), leemos el byte alto, lo desplazamos 8 bits a la izquierda (<<8) y usamos OR bit a bit (|) con el byte bajo para combinarlos en un solo entero de 16 bits.
Resultado del Proyecto
Después de subir el código, abre el Monitor Serial y configura la velocidad en baudios a 9600. Verás un flujo continuo de datos que muestran la aceleración (AcX, AcY, AcZ), la temperatura (Tmp) y los valores del giroscopio (GyX, GyY, GyZ). ¡Prueba inclinando y rotando el módulo MPU6050, y observa cómo cambian los valores en tiempo real!