Proyecto 10 Coche Inteligente Restringido
1.Descripción
En este proyecto, buscamos combinar el conocimiento de un sensor de seguimiento de línea y módulos controladores de motor para hacer un coche inteligente restringido. En el experimento, nuestro objetivo es usar el sensor de seguimiento de línea para detectar si hay una línea negra alrededor del coche inteligente, y luego controlar la rotación de los dos motores según los resultados de la detección de manera que se bloquee el coche inteligente dentro de un círculo dibujado con línea negra.
2.Diagrama de Flujo
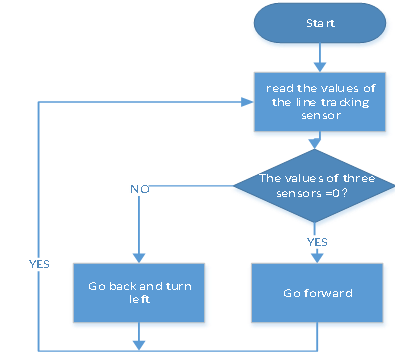
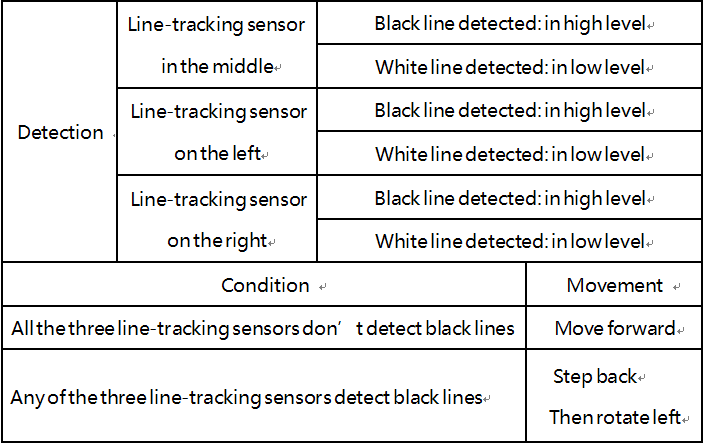
La lógica específica del coche inteligente 4WD restringido se muestra en la tabla.
3.Diagrama de Conexiones
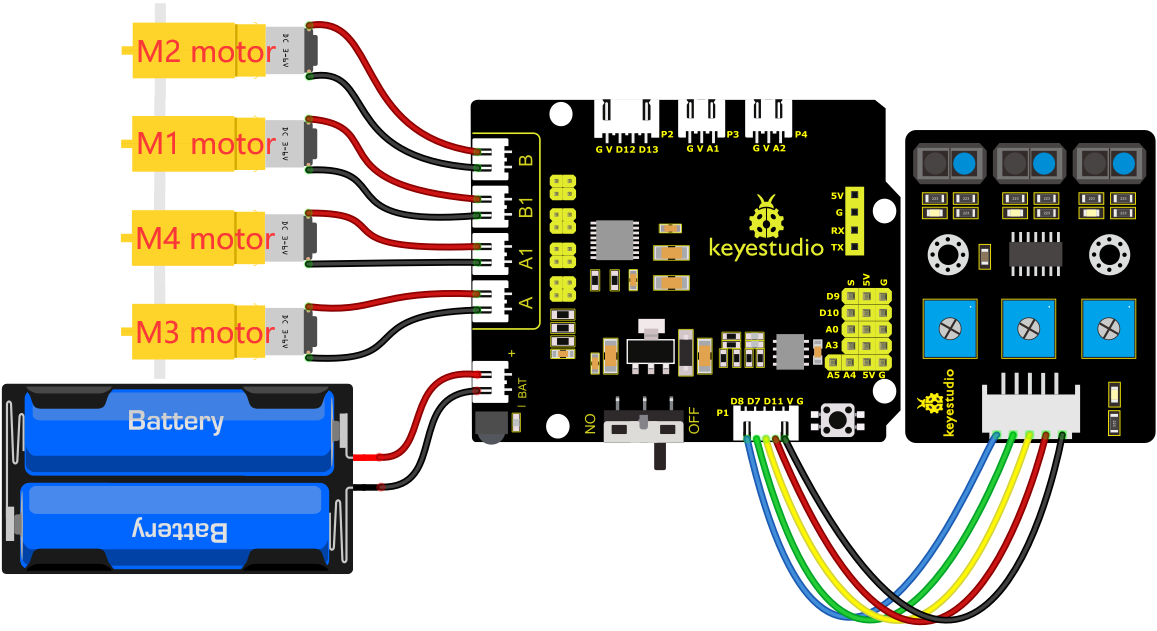
G, V, S1, S2 y S3 del sensor de seguimiento de línea están conectados a G (GND), V (VCC), D11, D7 y D8 de la placa de expansión del sensor.
La alimentación está conectada al puerto BAT.
4.Código de Prueba
//*************************************************************************
/*
keyestudio 4wd BT Car
lesson 10
Restricting Smart Car
http://www.keyestudio.com
*/
//Datos del patrón de sonrisa obtenidos de la herramienta táctil
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
#define SDA_Pin A4 //Configurar pin de datos a A4
#define SCL_Pin A5 //Configurar pin de reloj a A5
int left_ctrl = 2;//definir los pines de control de dirección del motor grupo B
int left_pwm = 5;//definir los pines de control PWM del motor grupo B
int right_ctrl = 4;//definir los pines de control de dirección del motor grupo A
int right_pwm = 6;//definir los pines de control PWM del motor grupo A
int sensor_L = 11;//definir el pin del sensor de seguimiento de línea izquierdo
int sensor_M = 7;//definir el pin del sensor de seguimiento de línea central
int sensor_R = 8;//definir el pin del sensor de seguimiento de línea derecho
int L_val,M_val,R_val;//definir estas variables
void setup() {
Serial.begin(9600);//iniciar monitor serial y configurar baud rate a 9600
pinMode(left_ctrl,OUTPUT);//configurar pines de control de dirección del motor grupo B como OUTPUT
pinMode(left_pwm,OUTPUT);//configurar pines de control PWM del motor grupo B como OUTPUT
pinMode(right_ctrl,OUTPUT);//configurar pines de control de dirección del motor grupo A como OUTPUT
pinMode(right_pwm,OUTPUT);//configurar pines de control PWM del motor grupo A como OUTPUT
pinMode(sensor_L,INPUT);//configurar pines del sensor de seguimiento de línea izquierdo como INPUT
pinMode(sensor_M,INPUT);//configurar pines del sensor de seguimiento de línea central como INPUT
pinMode(sensor_R,INPUT);//configurar pines del sensor de seguimiento de línea derecho como INPUT
//Configurar pin como salida
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
matrix_display(start01);//Mostrar patrón de inicio
}
void loop()
{
tracking(); //ejecutar programa principal
}
void tracking()
{
L_val = digitalRead(sensor_L);//leer el valor del sensor de seguimiento de línea izquierdo
M_val = digitalRead(sensor_M);//leer el valor del sensor de seguimiento de línea central
R_val = digitalRead(sensor_R);//leer el valor del sensor de seguimiento de línea derecho
if ( L_val == 0 && M_val == 0 && R_val == 0 ) { //cuando no se detectan líneas negras, el coche avanza
Car_front();
}
else { //De lo contrario, si alguno de los sensores detecta una línea negra, retroceder y girar a la izquierda
Car_back();
delay(500);
Car_left();
delay(500);
}
}
void Car_front()
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 180);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 180);
}
void Car_back()
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 80);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 80);
}
void Car_left()
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 150);
}
void Car_Stop()
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 0);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 0);
}
//esta función se utiliza para la pantalla de matriz de puntos
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la función que llama a la condición de inicio de transferencia de datos
IIC_send(0xc0); //seleccionar dirección
for (int i = 0; i < 16; i++) //los datos del patrón son 16 bytes
{
IIC_send(matrix_value[i]); //Transmitir los datos del patrón
}
IIC_end(); //Finalizar la transmisión de datos del patrón
IIC_start();
IIC_send(0x8A); //Control de pantalla, seleccionar ancho de pulso 4/16
IIC_end();
}
//Condiciones bajo las cuales comienza la transmisión de datos
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica el fin de la transmisión de datos
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//transmitir datos
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Cada byte tiene 8 bits y se verifica bit a bit comenzando por el menos significativo
{
if (send_data & mask) { //Establece los niveles alto y bajo de SDA_Pin dependiendo de si cada bit del byte es un 1 o un 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Elevar el pin de reloj SCL_Pin para detener la transmisión de datos
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //bajar el pin de reloj SCL_Pin para cambiar la SEÑAL de SDA
}
}
//*************************************************************************
5. Resultado de la prueba
Después de subir el código con éxito a la placa V4.0, conecta los cables según el diagrama de conexiones, enciende la alimentación externa y luego gira el interruptor DIP a ON. Coloca el coche inteligente en el círculo negro, entonces se moverá únicamente dentro del círculo.