Proyecto 12 Coche Inteligente Seguimiento Ultrasónico
1.Descripción
En este proyecto, buscaremos detectar la distancia entre el coche inteligente 4WD y los obstáculos delante mediante un sensor ultrasónico para controlar dos motores de manera que el coche se mueva y el tablero LED 8*8 muestre un patrón facial sonriente.
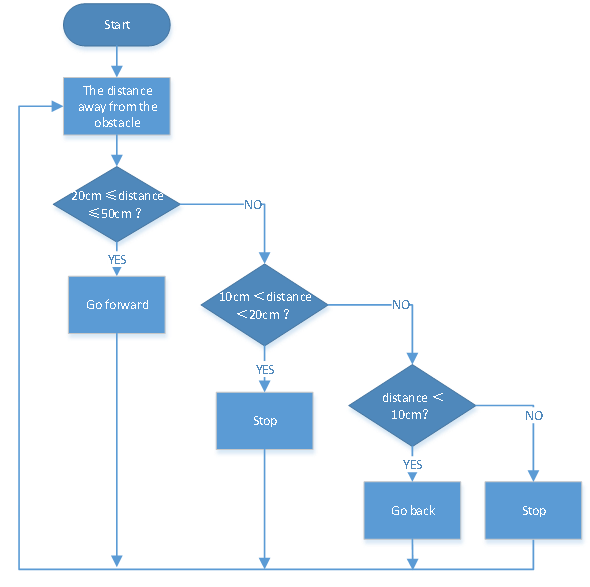
2.Diagrama de Flujo
| Detección | Distancia medida de los obstáculos frontales | distancia (unidad: cm) |
| Configuración | El tablero LED 8*16 muestra un patrón de sonrisa. | |
| Configurar servo a 90° | ||
| Condición | distancia≥20 y distancia≤50 | |
| Estado | Avanzar | |
| Condición | distancia>10 y distancia<20 | |
| distancia>50 | ||
| Condición | detenerse | |
| Condición | distancia≤10 | |
| Condición | Retroceder |
3.Diagrama de Conexiones
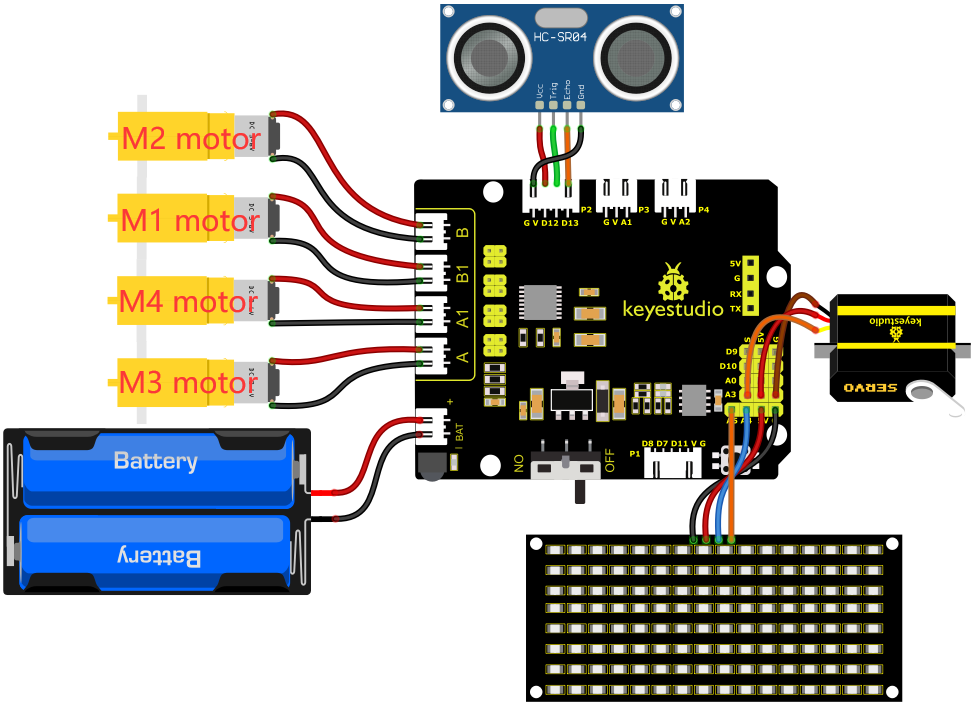
Conexiones:
1). GND, VCC, SDA y SCL del tablero LED 8*8 están conectados a G (GND), V (VCC), A4 y A5 de la placa de expansión.
2). VCC, Trig, Echo y Gnd del sensor ultrasónico están conectados a 5V (V), D12 (S), D13 (S) y Gnd (G).
3). El servo está conectado a G, V y A3. El cable marrón está conectado a Gnd (G), el cable rojo a 5V (V) y el cable naranja a A3.
4). La alimentación está conectada al puerto BAT.
4.Código de Prueba
//*******************************************************************************
/*
keyestudio 4wd BT Car
lección 12
Coche Seguimiento
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Configurar el pin de reloj a A5
#define SDA_Pin A4 //Configurar el pin de datos a A4
//Array, usado para almacenar los datos del patrón, puede ser calculado por ti mismo o obtenido de la herramienta del módulo
unsigned char smile[] = {0x00, 0x00, 0x1c, 0x02, 0x02, 0x02, 0x5c, 0x40, 0x40, 0x5c, 0x02, 0x02, 0x02, 0x1c, 0x00, 0x00};
const int servopin = A3;//Configurar el pin del servo
#include "SR04.h" //definir la librería de funciones del sensor ultrasónico
#define TRIG_PIN 12// configurar la señal del sensor ultrasónico a D12
#define ECHO_PIN 13// configurar la señal del sensor ultrasónico a D13
SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN);
long distance;
int left_ctrl = 2;//definir los pines de control de dirección del motor grupo B
int left_pwm = 5;//definir los pines de control PWM del motor grupo B
int right_ctrl = 4;//definir los pines de control de dirección del motor grupo A
int right_pwm = 6;//definir los pines de control PWM del motor grupo A
void setup() {
pinMode(left_ctrl,OUTPUT);//configurar los pines de control de dirección del motor grupo B como OUTPUT
pinMode(left_pwm,OUTPUT);//configurar los pines PWM del motor grupo B como OUTPUT
pinMode(right_ctrl,OUTPUT);//configurar los pines de control de dirección del motor grupo A como OUTPUT
pinMode(right_pwm,OUTPUT);//configurar los pines PWM del motor grupo A como OUTPUT
pinMode(TRIG_PIN, OUTPUT); //Configurar el pin trig como salida
pinMode(ECHO_PIN, INPUT); //Configurar el pin echo como entrada
pinMode(SCL_Pin,OUTPUT);//Configurar el pin de reloj como salida
pinMode(SDA_Pin,OUTPUT);//Configurar el pin de datos como salida
servopulse(servopin,90);//Configurar el ángulo inicial del servo a 90°
delay(500); //esperar 500ms
matrix_display(smile); //mostrar patrón de expresión sonriente
}
void loop() {
distance = sr04.Distance();//la distancia detectada por el sensor ultrasónico
if(distance <= 10)//si la distancia es menor o igual a 10
{
back();//retroceder
}
else if((distance > 10)&&(distance< 20 ))//si 10<distancia<20
{
Stop();//detenerse
}
else if((distance >= 20)&&(distance <= 50))//si 20≤distancia≤50
{
front();//avanzar
}
else//de lo contrario
{
Stop();//detenerse
}
}
void front()//define el estado de avanzar hacia adelante
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,100);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,100);
}
void back()//define el estado de retroceder
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,150);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,150);
}
void left()//define el estado de girar a la izquierda
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void right()//define el estado de girar a la derecha
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void Stop()//define el estado de detenerse
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm,0);
}
void servopulse(int servopin,int myangle)//Ángulo de funcionamiento del servo
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//esta función se usa para la pantalla de matriz de puntos
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la función que llama a la condición de inicio de transferencia de datos
IIC_send(0xc0); //seleccionar dirección
for (int i = 0; i < 16; i++) //los datos del patrón son 16 bytes
{
IIC_send(matrix_value[i]); //Transmitir los datos del patrón
}
IIC_end(); //Fin de la transmisión de datos del patrón
IIC_start();
IIC_send(0x8A); //Control de pantalla, seleccionar ancho de pulso 4/16
IIC_end();
}
//Condiciones bajo las cuales comienza la transmisión de datos
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica el fin de la transmisión de datos
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//transmitir datos
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Cada byte tiene 8 bits y se verifica bit a bit comenzando por el menos significativo
{
if (send_data & mask) { //Establece los niveles alto y bajo de SDA_Pin dependiendo de si cada bit del byte es un 1 o un 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Eleva el pin de reloj SCL_Pin para detener la transmisión de datos
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //baja el pin de reloj SCL_Pin para cambiar la SEÑAL de SDA
}
}
//*******************************************************************************
5.Resultado de la prueba
Después de subir el código con éxito a la placa V4.0, conecta los cables según el diagrama de conexiones, enciende la fuente de alimentación externa y luego activa el interruptor DIP a ON. Ajusta el servo a 90°, el coche inteligente se moverá con los obstáculos y la placa LED 8X16 mostrará “smile”.